自制“力學實驗多功能演示儀”
2016-08-01 06:08:49盧輝林
物理之友 2016年6期
王 旭 盧輝林
(江蘇省海安高級中學,江蘇 南通 226600)
?
自制“力學實驗多功能演示儀”
王旭盧輝林
(江蘇省海安高級中學,江蘇南通226600)
摘要:在力的合成與分解的教學中,存在傳統實驗器材精度差、實驗效果不明顯的現象.本文從實驗器材上進行了改進,通過自制“力學實驗多功能演示儀”,配合Dislab力傳感器等器材,取得了較好的實驗效果.
關鍵詞:力學實驗;演示儀;Dislab
傳統的力的合成與分解儀(如圖1、圖2)在做演示實驗時存在諸多問題,例如:用圖1的器材來演示力的合成實驗時由于結點不固定,細線的角度較難測讀.再有所掛鉤碼個數只能是整數個,學生總會有“說不清、道不明”的疑惑.而圖2的器材中,下面的兩個彈簧秤所測拉力由于受到彈簧秤自重的影響,讀數誤差較大.另外利用此裝置演示力的動態變化時,讀數時很難觀察到所有彈簧秤示數完整的變化情況.針對這些問題,筆者經過改進,自制了一個“多功能力學演示儀”,現敘述如下.

1“多功能演示儀”實物圖及結構
圖3為筆者自制的“力學實驗多功能演示儀”,主要由3部分組成:(1) 自制不銹鋼支架和調平螺栓;(2) 刻度均勻的圓盤;(3) 兩個旋轉臂(均帶圓柱和固定栓).

圖3
2“多功能演示儀”的輔助器材及實驗演示說明
輔助實驗器材:計算機一臺,Dislab實驗系統一套,鉤碼一盒(每個50g),細線若干,直尺一把,量角器一個.用“多功能演示儀”配合以上的實驗器材,可以進行以下演示實驗.
2.1探究力的“平行四邊形定則”
該實驗具體操作步驟如下:
(1) 利用六角螺絲栓將演示儀調平,在演示儀的兩個旋轉臂上分別固定一個力傳感器.
(2) 將Dislab數據采集器與計算機相連,在計算機上安裝Dislab實驗軟件,打開“通用軟件”,首先進行調零.
(3) 用三根不可伸長的細線打結,注意將細線的結點對準演示儀的圓心,兩根細線鉤住力傳感器,另一根將鉤碼懸于豎直平面.
(4) 記下鉤碼的重力大小及兩個力傳感器的示數,從圓盤上讀出兩細線與豎直方向的夾角,即記錄兩個拉力的方向.
(5) 利用直尺和量角器在黑板上用力的圖示法,分別作出兩個拉力及合力(鉤碼重力的平衡力).再以兩個拉力為鄰邊作平行四邊形,驗證合力與平行四邊形的對角線是否重合.
(6) 調整兩個力傳感器的角度,重復以上步驟,獲取多組數據,進行驗證.
2.2演示力的動態變化
以一道習題為例,用該演示儀來演示力的動態變化.
例:如圖4所示,用兩根繩子OA和OB系住一重物,繩OA固定于A點,手拉繩OB,使OB由水平位置逐漸轉到OB′方向,保持小球位置不變,在這個過程中,兩根繩受到的拉力變化情況是FOA___________,FOB___________.
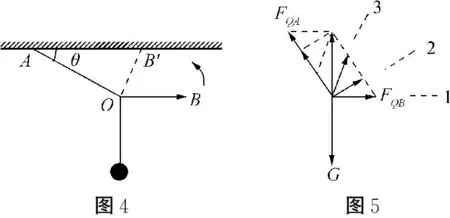
這道題對于初學者來說具有較大的難度,即便是老師利用比較直觀的“動態平行四邊形”(如圖5)進行了詳細講解后,有些學生還是將信將疑.傳統的實驗儀器誤差大、不直觀,利用改進后的“多功能演示儀”和Dislab實驗系統可以完成動態的演示,并可將FOA、FOB的數據直接采集.另外Dislab實驗系統還可以將各個力的動態變化情況以圖像的形式完整呈現出來,非常直觀.
該演示實驗具體操作步驟和結果如下:
(1) 將演示儀調節水平,在演示儀的兩個旋轉臂上分別固定一個力傳感器并與計算機相連.
(2) 按圖4所示調節旋轉臂,左臂力傳感器所拉細線對應繩OA,保持其固定.右臂力傳感器所拉細線對應繩OB,且初始時調節細線至水平位置.將細線的結點調節到圓盤的圓心,向下方引出一根細線,并在豎直方向懸掛鉤碼(筆者做實驗時掛了兩個50g的鉤碼).
(3) 打開Dislab實驗軟件,點擊“通用軟件”,出現界面后,系統會自動彈出兩個對話框,直接顯示出拉力FOA、FOB的大小.
(4) 保持左邊的旋臂不動,緩慢將右臂由B向B′轉動,同時在紙上記錄下計算機所顯示的各組數據.表1中的數據即為筆者利用此裝置采集的力的大小.
(5) 若要得到變化過程中力的圖像,需將右臂恢復到初始位置,點擊Dislab實驗軟件工具欄中的“組合圖線”,添加x軸為時間,y軸分別為力F1(FOA)、F2(FOB),在對話框中的下拉菜單中選擇兩種不同的顏色作為力的標記.
(6) 將右臂由OB位置逐漸轉至OB′位置,觀察圖像可以發現:FOA由大漸漸變小,FOB先變小后變大(如圖6).

表1
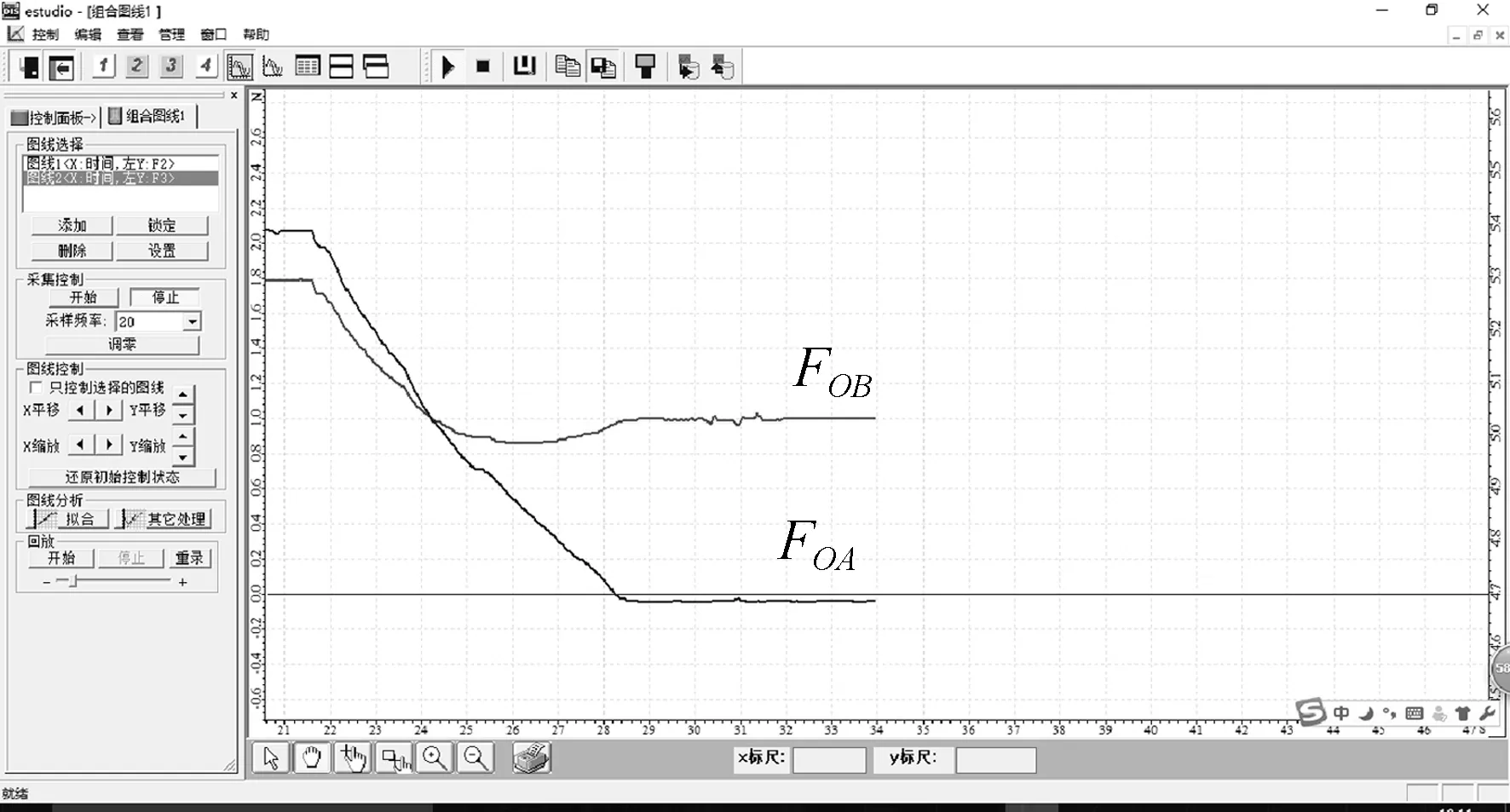
圖6
3幾點注意事項及說明
(1) 利用該裝置完成以上兩個實驗時發現,實驗效果直接受到支架是否調節水平的影響.
(2) 實驗時要確保各個力在豎直平面內,且細線的結點應與圓盤圓心重合.
(3) 利用Dislab實驗軟件采集數據時,要先調零再采集數據.
(4) 該裝置成本低廉,安全耐用,配合力傳感器等器材可以完成多個力學實驗,實驗精度高、演示效果好.
