固定鴨舵高速旋轉彈修正減旋技術研究*
2016-08-02 07:27:35郝永平陶迎迎徐浩軍
彈箭與制導學報 2016年2期
關鍵詞:仿真
袁 備,郝永平,陶迎迎,徐浩軍,趙 達
(沈陽理工大學機械工程學院,沈陽 110159)
?
固定鴨舵高速旋轉彈修正減旋技術研究*
袁備,郝永平,陶迎迎,徐浩軍,趙達
(沈陽理工大學機械工程學院,沈陽110159)
摘要:為了實現對高速旋轉彈進行低成本的二維彈道修正,采用在高速旋轉彈彈頭加裝兩對固定鴨舵的二維彈道修正原理和減旋技術。為了研究鴨舵的減旋能力,建立了二維彈道修正彈模型,對不同彈丸飛行速度、攻角、舵偏角對應的導轉力矩進行動力學和運動學聯合仿真,以及對導轉力矩在全彈道進行數值計算。結果表明,固定鴨舵能夠滿足對高速旋轉彈修正減旋要求,研究結果對二維彈道修正技術研究有較好的參考作用。
關鍵詞:固定鴨舵;減旋;導轉力矩;仿真
0引言
目前二維彈道修正彈因其成本較低同時具有相對的射擊精度,從而在未來信息化戰爭中將扮演著必不可少的重要角色[1]。彈道修正彈是基于原有普通彈藥,通過在彈丸頭部安裝彈道修正引信機構,同時監測彈丸的空中姿態,通過控制引信機構進而對彈丸進行彈道修正,從而保證二維修正彈的射擊精度[2]。針對二維彈道修正彈,美國提出了XM1156“精確制導組件(PGK)”彈道修正引信機構,其運用控制頭部鴨舵引信機構的旋轉姿態實現彈道的二維修正,現已進入試射階段[3-5]。彈道修正彈處于常規無控彈藥和智能導彈之間,其成本相對較低且打擊精度較高,因此性價比相對高,因而研究相當迅速,各國在這此領域的競爭也相當激烈。現階段,修正彈的修正引信機構的發展方向主要有微型脈沖噴氣推沖火箭裝置、燃氣射流發動機控制和空氣動力鴨舵[6]。文中將對高速旋轉彈加裝兩對固定鴨舵彈道修正技術進行探索性研究。
1固定鴨舵彈道修正原理
基于固定鴨舵的彈道修正技術是在彈丸空中飛行時,依據實時測得的攻擊目標坐標持續輸出修正控制命令,操控鴨舵舵片位于理想的修正位置,鴨舵舵片由于受到空氣動力的作用產生的修偏力,利用此力對彈道的射程和橫偏進行二維修正,控制彈丸處于更為精確地路徑攻擊目標,實現預定打擊效果。
對于高速旋轉彈丸,在飛行時彈丸轉速非常大,不易控制,從而使舵機對鴨舵的控制非常困難。因此,為解決這一難題,文中采用一種基于鴨舵減旋理論的控制方法[7]。
2固定鴨舵彈道減旋技術
如圖1所示,為兩組固定式鴨舵片的三維模型圖。圖中1號和2號為一對舵片,遵循相同的舵偏角且二者同向對稱,在修正控制時在氣動舵片產生修偏力。圖中3號和4號是另一對舵片,二者具有相同舵偏角且反向差動不對稱安裝,由于空氣作用,在彈丸頭部會產生與彈丸轉速方向相反的導轉力矩,用于控制鴨舵轉速。
圖1 固定鴨舵三維模型圖
如圖2所示,對一個固定鴨舵片進行受力分析,已知4個鴨舵的舵偏角為θ,F為鴨舵所受的風阻力,其中F1為風阻力F的分力,方向垂直于鴨舵斜面,大小為F1=Fsinθ;F2為風阻力F的另一個分力,方向平行于鴨舵斜面,大小F2=Fcosθ。由于舵偏角的存在,使圖中所示鴨舵片的左側受力面積大于右側受力面積,因此在X軸的正向產生舵偏力,在Y軸的負方向形成阻力。
圖2 鴨舵舵片受力分解圖
在彈丸的飛行過程中,如圖3所示,頭部鴨舵同向舵受到氣動力Ft1和Ft2的作用,但是由于固定鴨舵軸對稱,旋轉一周Ft1和Ft2對鴨舵質心所產生的合力矩正好相互抵消,二者的合力為修正力。頭部差動舵受到的氣動力Fc1和Fc2的作用,旋轉一周Fc1和Fc2對鴨舵質心產生合力矩T,方向與彈丸旋轉方向相反,從而使得在彈丸頭部繞彈軸反向旋轉。
彈道修正過程為:在彈丸發射前,鴨舵舵片與彈體固連在一起,因此在彈丸發射瞬間,鴨舵舵片與彈體以同一轉速繞逆時針方向旋轉。鴨舵與彈體通過兩個軸承連接在一起,由于導轉力矩作用于差動舵片上,會產生繞彈軸的反向轉矩,此力矩能夠抵消掉軸承摩擦力矩和滾轉阻尼力矩的作用,使鴨舵轉速先減小到零然后反向不斷增加,形成彈丸彈體與鴨舵舵片的旋轉方向相反情況,從而使得鴨舵與彈體形成隔轉。通過控制電磁力矩的大小來調節鴨舵的轉速,使其處于微旋狀態,為接下來彈丸彈道軌跡修正做準備。

圖3 鴨舵舵片受力分析圖
3固定鴨舵參量計算
彈丸在飛行過程中,固定鴨舵舵片受到的力矩有導轉力矩、滾轉阻尼力矩、軸承摩擦力矩、電磁力矩,如圖4所示。
圖4 鴨舵所受力矩圖
1)導轉力矩是由彈丸頭部的一對差動舵受到氣動力的作用產生的與彈丸轉速相反的力矩[8],用符號T表示,則
(1)
2)鴨舵滾轉阻尼力矩是彈丸頭部繞彈軸自轉時,由于空氣的粘性牽動彈頭周邊的空氣隨彈頭一起旋轉,使彈丸頭部自轉角速度不斷衰減的力矩[9],用符號Tg表示,則
(2)
3)軸承摩擦力矩[10]
在彈丸飛行時,彈體和鴨舵之間運用兩個軸承連接且二者形成隔轉,因此彈體與鴨舵間會形成軸承摩擦力矩。
根據能量守恒定律可以得出軸承所受總摩擦力矩,如下式所示:
(3)
式中:E總是在單位時間內損失的總能量,表達式如式(3);i、e下角標分別表示軸承內外圈數;j表示第j個鋼球;z表示鋼球數量。
4固定鴨舵減旋能力仿真分析
4.1固定鴨舵氣動特性仿真分析
文中重點研究鴨舵翼面導轉力矩對鴨舵轉速和減旋能力的影響。由式(1)可知,翼面導轉力矩主要與彈丸飛行速度、攻角和參考面積,而參考面積主要與鴨舵的舵偏角有關。
以高速旋轉彈丸為例,運用CFD對彈丸的氣動參數進行動力學仿真計算,通過建立模型、邊界選取、網格劃分,仿真計算得出導轉力矩T與馬赫數Ma、攻角δ、舵偏角ε的關系。
1)在彈丸攻角和舵偏角一定的條件下,不同馬赫數下對應的導轉力矩的仿真數據如表1和圖5所示。

表1 導轉力矩隨馬赫數的變化
圖5 導轉力矩隨馬赫數的變化
2)在彈丸飛行中的馬赫數和舵偏角一定的條件下,不同攻角對應的導轉力矩的仿真數據如表2和圖6所示。

表2 導轉力矩隨攻角的變化
圖6 導轉力矩隨攻角的變化
3)在彈丸飛行過程中馬赫數和攻角一定的條件下,不同舵偏角對應的導轉力矩的仿真數據如表3和圖7所示。

表3 導轉力矩隨舵偏角的變化
圖7 導轉力矩隨舵偏角的變化
通過對表1~表3中數據和圖5~圖7中趨勢分析,可以得到以下結論:
1)隨著馬赫數和舵偏角的增大,翼面導轉力矩都隨之增加,但增加趨勢不同,導轉力矩與馬赫數呈二次函數關系,而與舵偏角呈線性關系,與式(1)理論公式相符;隨著攻角的增大翼面導轉力矩反而減小。
2)馬赫數對翼面導轉力矩的影響最大,1.75 Ma是0.5 Ma的17.5倍;舵偏角影響其次,舵偏角為10°對應導轉力矩的影響是舵偏角為2°的6.4倍;攻角對導轉力矩影響最小,攻角由0°到8°,導轉力矩減小了6.2%。
因此,在考慮鴨舵的減旋能力設計固定鴨舵合理的氣動布局時,應綜合重點考慮彈丸飛行速度和舵偏角的影響。對于超音速彈丸,需要選取大輸出功率的舵機,仿真彈丸的初速度為516m/s,應該選取輸出轉矩為1.5N·m的舵機。
4.2全彈道運動學仿真分析
以高速旋轉彈丸為例,彈丸初速度為516m/s,出炮口轉速為170r/s,對彈丸進行全彈道運動學仿真。在全彈道飛行過程中,鴨舵差動舵產生的導轉力矩的變化趨勢圖如圖8所示;全彈道過程中,彈丸的速度變化曲線圖如圖9所示;彈丸出炮口0~0.5s固定鴨舵轉速變化趨勢如圖10所示。

圖8 全彈道導轉力矩變化趨勢圖
圖9 全彈道彈丸速度變化曲線圖
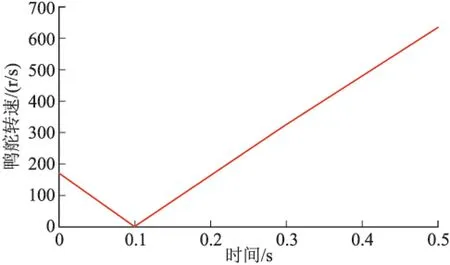
圖10 0~0.5 s鴨舵轉速變化曲線圖
通過對圖8~圖10變化曲線分析可以看出:
1)導轉力矩變化趨勢與彈丸速度的變化趨勢相似,與式(1)理論公式二者關系相符合。
2)在出炮口的瞬間,彈丸速度最大,對應導轉力矩最大,T=1.52N·m,全彈道導轉力矩的變化較大,最后大約穩定在約為T=0.18N·m。
3)在彈丸出炮口后約12s的時間內,導轉力矩遞減較快,遞減量為初始值84.7%;12s后導轉力矩的變化相對較小,趨于穩定值。
4)由于導轉力矩的作用,鴨舵轉速從出炮口170r/s經歷0.1s降為零,然后鴨舵相對彈體反向高速旋轉。
如果沒有舵機的控制,鴨舵轉速會一直增加,當鴨舵轉速過高,鴨舵和彈體的轉速差過大,會使軸承溫度過高,軸承會出現抱死,從而彈體會失穩。因此,在鴨舵剛剛反向旋轉轉速很小時,適當調整電機電磁力矩的大小即可起到減旋作用,控制鴨舵處于微速旋轉狀態,為后期彈丸的修正做準備。
5結論
文中闡述了高速旋轉彈通過安裝兩對固定式鴨舵對彈丸彈道軌跡進行二維彈道修正,并重點闡述了修正原理、減旋技術和相關參量的計算。通過建立高速旋轉彈模型,對其進行了氣動力和運動學仿真分析,研究了馬赫數、攻角、舵偏角對導轉力矩的影響,以及全彈道導轉力矩的變化,結果表明,通過適當調節彈丸速度、舵偏角來改變導轉力矩,在鴨舵反向旋轉的瞬間與電機電磁力矩配合可以達到減旋的目的。文中為該種二維修正彈修正技術的研究和應用提供了理論和數據依據。
參考文獻:
[1]邵盼, 郭煜洋, 郝永平, 等. 鴨舵修正機構舵偏角選擇方法 [J]. 彈箭與制導學報, 2014, 34(6): 33-36.
[2]楊慧娟, 霍鵬飛, 黃錚. 彈道修正彈修正執行機構綜述 [J]. 四川兵工學報, 2011, 32(1): 7-9.
[3]張開創, 劉秋生, 熊然, 等. 固定鴨舵彈道修正組件發展 [J]. 飛航導彈, 2014(3): 64-67.
[4]ALFORDRobertL.Electro-mechanicalrollcontrolapparatusandmethod:US5442864 [P]. 1995.
[5]ROPERTJohnG2-Dprojectiletrajectorycorrector:US6502786B2 [P]. 2003.
[6]劉承恩, 范寧軍, 何娟. 彈道修正引信鴨舵空氣動力學設計和仿真 [J]. 探測與控制學報, 2003, 25(3): 40-43.
[7]SMITHDouglasL.Fractionalrollcontrolapparatusforaspinningprojectile:US7412930 [P]. 2008-08-19.
[8]程建偉, 于志遠, 姚曉先, 等. 可控滾轉舵系統滾轉控制研究 [J]. 北京理工大學學報, 2010, 30(6): 670-673.
[9]丁則勝, 劉亞飛, 徐琴, 等. 彈體及減旋片滾轉阻尼試驗研究 [J]. 彈道學報, 2001, 13(1): 62-65.
[10]郝永平, 郭煜洋, 張嘉易, 等. 軸承摩擦力矩對智能引信控制效率的影響 [J]. 彈箭與制導學報, 2014, 34(4): 69-73.
*收稿日期:2015-05-06
作者簡介:袁備(1989-),男,山東棗莊人,碩士研究生,研究方向:彈道修正技術。
中圖分類號:TJ012.3
文獻標志碼:A
TrajectoryCorrectionAnti-rotationResearchofHigh-speedRotatingProjectilewithFixedRudder
YUANBei,HAOYongping,TAOYingying,XUHaojun,ZHAODa
(SchoolofMechanicalEngineering,ShenyangLigongUniversity,Shenyang110159,China)
Abstract:In order to correct high-speed rotation of two-dimensional trajectory correction projectile and realize two-dimensional correction at low cost, according to two-dimensional trajectory correction principle and anti-rotation technique, high-speed rotating projectile was fixed with two fixed canards in warhead. In order to research anti-rotation ability of canards, the two-dimensional trajectory correction projectile model was established. Different projectile flight speed, attack angle, rudder angle were included in dynamics and kinematics simulation, and rotation moment in the whole trajectory was calculated. The results indicate that the fixed canards can satisfy modified anti-rotation requirements of high-speed rotary missile. The results offer reference for further research of 2D trajectory correction.
Keywords:fixed canards; anti-rotation; rotation moment; simulation
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49