基于AMESim的汽車ESP液壓控制系統建模與分析
2016-08-09 00:57:49張凡彭富明
大科技 2016年21期
張凡 彭富明
(南京理工大學 南京市 210094)
基于AMESim的汽車ESP液壓控制系統建模與分析
張凡 彭富明
(南京理工大學 南京市 210094)
簡述ESP系統結構及原理,基于AMESim軟件建立ESP液壓系統仿真模型,模擬汽車在不同工況下ESP系統增壓、保壓、泄壓的工作過程,對ESP液壓系統動態特性進行分析。
電子穩定程序;液壓執行單元;動態特性;AMESim
引言
汽車電子穩定程序(Electronic Stability Program)是目前世界上最尖端的汽車主動安全系統電子設備。汽車ESP液壓系統主要由電子控制單元(Electronic Control Unit)、傳感器和液壓系統等三部分組成,在汽車行駛過程中,ESP根據車輛行駛狀況,通過對單個車輪施加一定的制動壓力,調節汽車橫擺力矩,保證汽車按照駕駛員的意圖行駛[1]。汽車穩定性控制系統可以使汽車在各種行駛工況及允許的物理極限范圍下,保持在車道內穩定行駛,提高汽車在高速時遇到突發情況下的安全性。ESP系統的關鍵執行部件—液壓調節器(HCU),是一個在短時間內完成動態響應的高速響應系統,HCU的性能顯著地影響著整個系統的性能。為保證ESP系統的工作可靠性和控制精度,進行其液壓系統動態特性研究是十分必要的。
1 ESP液壓系統結構及原理
ESP液壓控制系統的組成主要包括制動主缸,制動輪缸,液壓調節器。其中液壓調節器包括12個二位二通電磁閥、單向閥、柱塞泵等。ESP系統工作時,隔離閥1從常通狀態切換為限壓狀態,吸入閥2打開,制動液在預壓泵9的作用下通過吸入閥2、回油泵6進入高壓阻尼器8,再進入增壓閥3進入輪缸5,壓緊摩擦片進行制動;當制動力足夠時,增壓閥3和吸入閥2關閉,減壓閥4打開,輪缸中的高壓制動液進入蓄能器7,為下一次制動作準備。如此循環直到退出ESP模式。
2 ESP液壓系統建模
2.1 液壓缸建模
ESP系統用于控制車輛的橫擺力矩,其制動過程主要有三種形式,分別為被動制動、半主動制動和全主動制動。考慮到低溫條件下,液壓介質的黏度很高,在全主動制動過程中,液壓系統建立壓力時間長,不利于車輛的主動干預,所以引入預壓泵單元。系統液壓主缸采用汽車常用的雙腔串聯式制動主缸,保證至少有一個制動回路能正常工作。其中兩個油缸分別用于前輪制動和后輪制動。結合雙腔串聯制動液壓缸的結構原理和預壓泵單元中油泵的數學模型,從AMESim庫中選取正確的元件構建模型。為驗證液壓缸建模合理性,現對其獨立仿真分析,仿真結果如圖1所示。從圖中可以看出兩個油缸的輸出壓力與給定的信號在時域內吻合,說明液壓缸的模型是正確的。
11月5日,美國正式恢復了對伊朗能源、金融領域單邊制裁。美國制裁伊朗,最終的目的是要制造全球石油市場的緊缺,提升石油的價格,從而為美國石油打開國際市場,促進美國原油的生產,提升美國的利益。但美國的這個設想存在極大的風險,不但難以實現,還可能遭到反噬。

圖1 制動主缸壓力響應
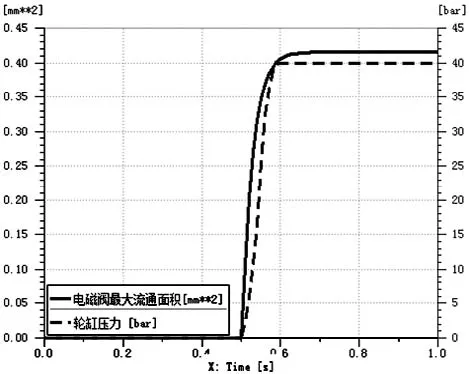
圖2 制動輪缸壓力響應
商務英語教學的主要目標之一就是讓學生掌握大量的專業詞匯,這是學好商務英語的基礎。詞匯和語法的學習應與語言技能訓練與商務話題緊密結合,才能在規范語言的同時增加針對性和趣味性(莫再樹,2006)。詞匯和語法學習者通過語言輸入進行體驗,觀察目標語的結構和語義,然后抽象出目標語使用的規則,形成假設,再通過練習來檢驗這種假設。
2.2 制動輪缸建模
液壓調節器用于接收電子穩定性系統控制器發出的指令,通過各液壓元件的動作實現相應回路的通斷,進而實現各制動輪缸壓力的調節。基于油泵、蓄能器節流器、電磁閥等模型的數學模型,分別在AMESim軟件的液壓庫和機械庫中為其找到相應的子模型,按照液壓原理圖連接好,得到的ESP液壓調節器的模型。建立好完整的汽車ESP液壓系統模型[2]。
2.3 液壓調節器建模
汽車ESP液壓系統的動態特性是指系統從原來的平衡狀態達到一個新平衡狀態的過程中所表現出來的特性。在這個動態過程中,系統中的各變量都在隨時間不斷地變化,這樣就體現了系統動態特性的優劣。根據動態特性相關理論,本文對ESP液壓系統提出系統穩定和輪缸壓力響應速度兩個動態指標,并從電磁閥截流面積、預壓單元預壓大小兩個因素進行仿真研究并分析。仿真參數設置為:柱塞泵排量為0.18cc/r,蓄能器活塞直徑為15mm,活塞行程為10mm,預壓單元預壓值為25bar,增壓閥截流面積0.5mm2,減壓閥截流面積0.6mm2,隔離閥和吸入閥截流面積為2mm2,工作溫度39℃,液壓介質密度850kg/m3。ESP系統處于全主動工作狀態,一個調節周期為0.5s,其中增壓時間0.2s,保壓時間0.1s,減壓時間0.2s。
獲取粒子pi適應值后,與當前粒子的位置進行比較并判斷是否最優.粒子i達到過的最優位置記為pbesti=(pi1,pi2,pi3,…,piD)T,整個粒子群體遍歷到的最優位置記為gbest=(pg1,pg2,pg3,…,pgD)T.在傳統的粒子群算法中,每次迭代過程中的速度更新和位置刷新一般按照以下表達式:
車輪制動器分為鼓式制動器與盤式制動器。盤式制動器具有諸多優點,應用廣泛,對于車輛制動性能以及車輛主動安全性的提高效果明顯,所以本文將建立盤式制動器模型。結合盤式制動器的結構原理在AMESim中建立制動輪缸模型。對其性能分析,結果如圖2所示。從圖中可以看出在第0.5s的時候電磁閥開啟,經過0.1s電磁閥開啟最大流通面積,同時在預壓泵工作的條件下輪缸壓力迅速建立起來,壓力響應快,說明制動輪缸的模型是正確的。
3 動態特性分析
前進速度:當鐵絲直徑為8 毫米時,前進的速度為4500 能正常循跡,但速度過慢,當提速為4800 時加速2 秒,當加速到5000 時因車速過快,影響了循跡,卡頓現象嚴重。故選擇最佳前進速度4800。
3.1 預壓單元預壓大小對系統動態特性的影響
仿真對比預壓單元壓力分別為0bar,20bar,40bar的左前輪缸壓力響應和流量響應。仿真結果如圖3~4所示,從圖中可以看出,預壓單元預壓力為0時,輪缸的響應很慢,對主缸進行預壓處理后,響應的品質大為提高。
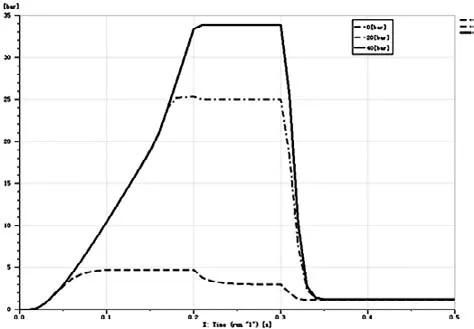
圖3 預壓單元壓力對輪缸壓力的影響
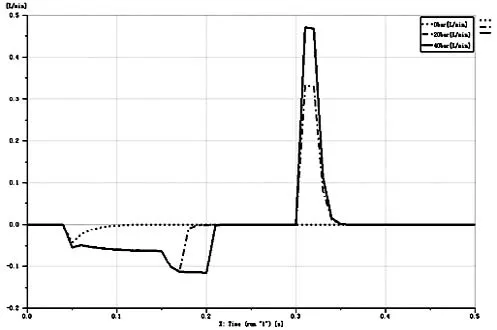
圖4 預壓單元壓力對輪缸流量的影響
3.2 液壓控制閥截流面積對系統動態特性的影響
液壓控制閥特征參數是閥口截流面積,在實際ESP液壓系統中,液壓閥的截流面積一般在0.5mm2左右。故設置增壓閥截流面積分別為0.8mm2、0.5mm2、0.3mm2, 對 應 的 減 壓 閥 截 流 面 積 為 0.9mm2、0.6mm2、0.4mm2,仿真得到變化曲線如圖5~6所示,從圖中可以看出過小的截流面積導致系統壓力調節明顯滯后,使得輪缸壓力建立過慢;但是過大的截流面積容易產生流量的脈動沖擊,嚴重影響系統的穩定性。因此截流面積設計時要注意與實際系統的匹配。
4 總結
本文基于AMESim軟件,建立了ESP液壓系統模型,驗證了其合理性,在此基礎上,提出兩個動態性能指標,并選擇其中兩個關鍵影響因素對整個ESP液壓系統進行仿真分析,結果表明各影響因素對系統特性有重要的影響,在設計ESP液壓系統時,要求合理匹配主要器件的特征參數。
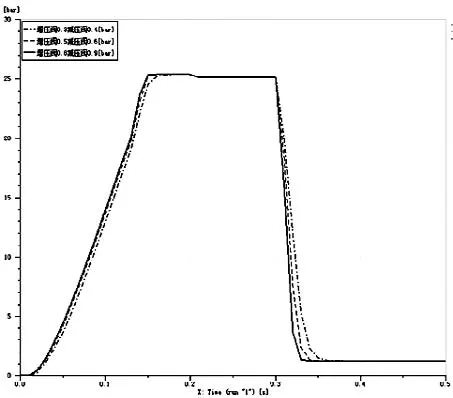
圖5 截流面積對輪缸壓力的影響
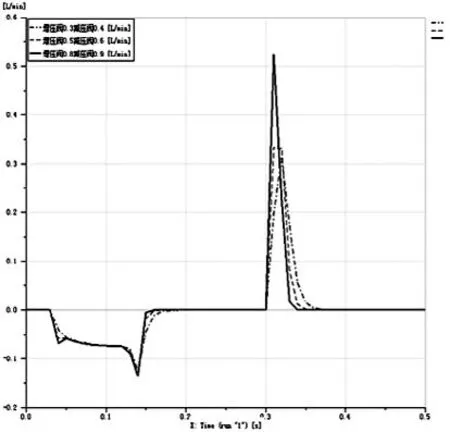
圖6 截流面積對輪缸流量的影響
[1]Anton T van Zanten,Rainer Erhardt,Georg Pfalf.VDC,the vehicle dynamic control system of Boscp[C].SAE Paper 950759,1995.
[2]祁雪樂,宋健,土會義,等.基于AMESim的汽車ESP液壓控制系統建模與分析.機床與液壓,2005,8:115~118.
TH137
A
1004-7344(2016)21-0271-02
2016-7-10
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37