基于反步法的電壓型PWM整流器無源控制
2016-08-11 11:38:47張成相化晨冰蔣德玉翁海霞
山東電力技術 2016年6期
張 恒,張成相,化晨冰,蔣德玉,翁海霞
基于反步法的電壓型PWM整流器無源控制
張恒,張成相,化晨冰,蔣德玉,翁海霞
(國網山東省電力公司臨沂供電公司,山東臨沂276000)
電壓型PWM整流器無源控制器在負載變化、電源三相不平衡時存在較大的直流電壓穩態誤差,且控制系統的響應速度慢。通過前饋解耦方法將電壓型PWM整流器在同步坐標系下的多輸入、多輸出非線性模型分解為兩個單輸入、單輸出的非線性模型,對每個單輸入單輸出模型,分別采用反步法設計了全局漸近穩定的非線性控制器。由此可實現整流器有功電流和無功電流的解耦控制,使整流器具有更好的動、靜態性能。仿真驗證了所提出的方法的可行性和有效性。
電壓型PWM整流器;無源控制;反步法;單輸入;單輸出
0 引言
PWM整流器具有功率因數高、能量可雙向流動、網側電流諧波含量少等優點,廣泛應用于單位功率因數整流、有源濾波、無功補償及交流傳動等變流控制中。
PWM整流器可分為電流型和電壓型。電壓型PWM整流器具有結構簡單、損耗較低、控制簡單等優點[1-2]。電壓型PWM整流器的控制方法一直是研究熱點,隨著矢量控制及智能控制理論的發展,許多新穎的控制方法被學者們提出來[3]。
文獻[2]提出了基于雙閉環矢量控制的電壓型PWM整流器控制方法,但依然采用傳統PI控制器,參數整定較難,且該方法難以滿足高性能控制要求。文獻[3]提出了PWM整流器的比例諧振控制方法,無交流電壓相位信息檢測和旋轉坐標變換等環節,即可實現系統穩定控制,但系統容易受到干擾。文獻[4]提出了預測直接功率控制方案,文獻[5]提出了一種基于瞬時功率預測方法的模糊邏輯控制,改進了直接功率控制策略,但該方法較為復雜,工程應用難度較大。文獻[6]將內模控制(Internal Model Control,IMC)技術引入電壓型PWM整流器電流控制中,用內模控制原理來設計電流內環的 PI參數,控制方法具有一定的創新。
文獻[3]介紹了基于反步法的電流型PWM整流,具有一定的借鑒意義,但并沒有完整的理論論證和仿真驗證。將該方法引入到電壓型PWM整流器的控制方法研究中,通過完整的理論論證,設計了一種基于反步法的電壓型PWM整流器的控制方法。
該方法采用前饋解耦方法將非線性模型分解為兩個單輸入單輸出的非線性模型,然后采用反步法對每個系統設計了全局漸進穩定控制器,從而實現整個系統在大擾動下的全局漸進穩定性。
1 電壓型PWM整流器數學模型
圖1所示為三相電壓型PWM整流器的主電路拓撲結構。

圖1 三相電壓型PWM整流器
在三相平衡的情況下,忽略開關損耗以及網側濾波電感的非線性因素,可以通過坐標變換[1-8],得到三相電壓型PWM整流器在旋轉坐標系下的數學模型為
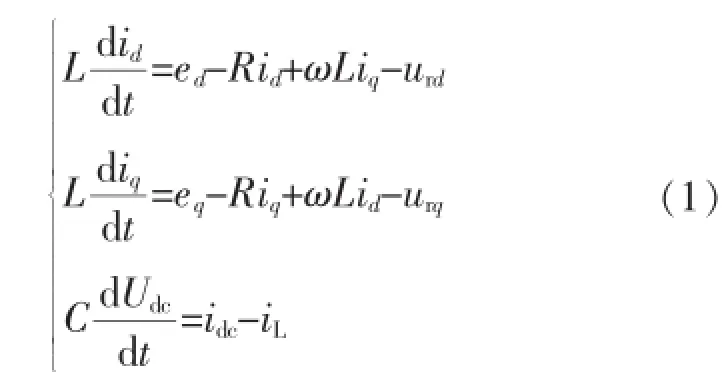
式中:id、iq為交流電流的d、q軸上分量;ed、eq為交流電壓的d、q軸上分量;Sd、Sq為開關函數在d、q軸上的分量;urd、urq為交流側電壓基波量在d、q軸上的分量,且有:urd=SdUdc、urq=SqUdc。
忽略整流器電阻和電感的功率損耗,交流側和直流側的功率平衡表達式為

將式(1)中第三式兩端同時乘以Udc,將式(2)代入整理得:

當采用基于電網電壓矢量定向的控制方法時有

將式(4)帶入式(1)和式(3),并簡化為狀態空間表達式,得

式中:Em為電網電壓矢量。
為了實現變量之間的解耦,定義如下:

則式(5)可分解為
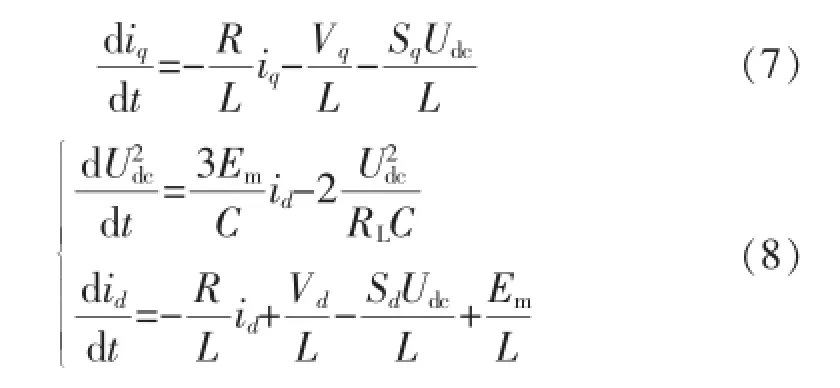
式(7)、(8)分別為兩個單輸入單輸出系統,依據式(7)可調節功率因數,式(8)調節直流電壓。
2 反步法控制器設計
2.1反步法基本思想
單輸入單輸出非線性系統[8]數學模型如下:
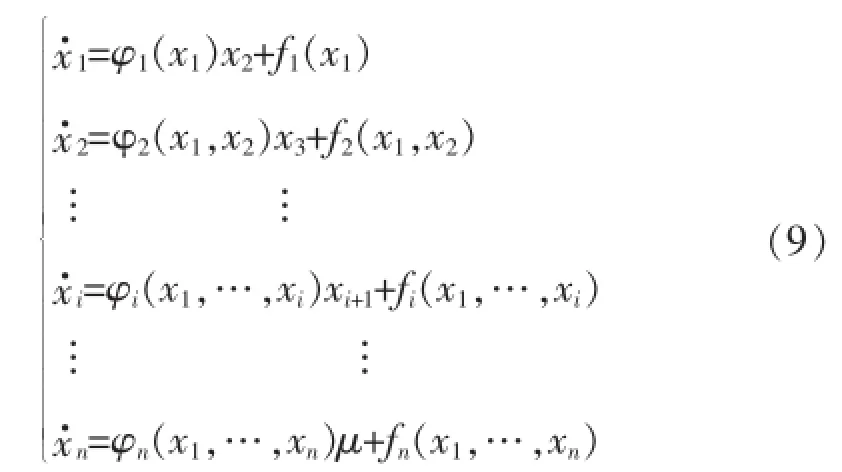
式中:x∈R為系統的輸入變量;μ∈R為系統的狀態量。
2.2直流電壓控制器設計
則有:
應用反步法設計直流電壓控制器的思路如下:令θ1=U2dc-U2dcref,則有:

采用PI控制,取為虛擬控制,選取:

把式(11)帶入式(10),得:

令θ2=id-φ1(θ1),并定義 Lyapunov函數V1及其導數:

對θ2取微分,得
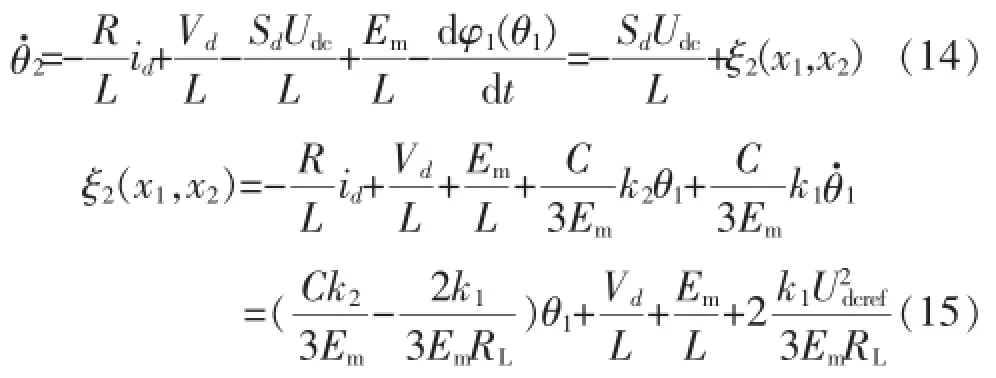
選擇控制變量:

將式(16)帶入式(14),得:

定義Lyapunov函數及其導數

2.3q軸電流控制器設計
將式(7)表示成式(9)的形式:

若控制iq趨近于iqref,這可以實現對功率因數的控制。
反步法設計q軸電流控制器的思路如下:
若令θ3=iq-iqref,則有:

若選取Vq為虛擬控制量,且選擇

若令θ4=Vq-φ3(θ3),且定義Lyapunov函數V1:

選擇控制變量:

綜合式(19)、(20)、(21)、(22)可得:

可知,只要滿足條件:

則整個系統漸進穩定。
綜合直流電壓控制和q軸電流控制可得,直流電壓和q軸電流控制器均采用基于反步法設計的控制器,則三相PWM整流器控制系統的原理結構圖如圖2所示。
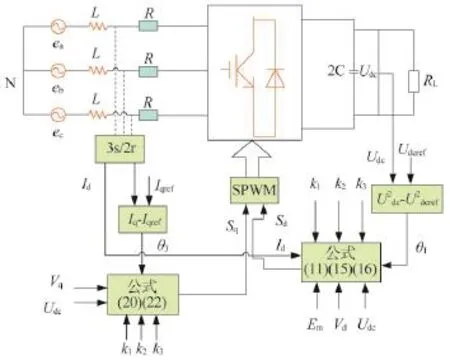
圖2 三相PWM整流器控制結構
4 控制仿真分析
為了驗證該方法的有效性和可行性,基于Matlab搭建了仿真模型并進行仿真研究,如圖3所示。
主電路參數如下:電源相電壓有效值E=220 V,電網頻率f=50 Hz,交流側電感L=5 mH,交流側電阻R=0.3 Ω,電容C=6 mF,負載電阻RL=100 Ω,調制頻率為5 000 Hz,采樣頻率為10 kHz,直流電壓參考值Udcref=600 V。直流電壓控制器參數:k1=0,k2=200,k3= 20;q軸電流控制器參數:k1=0,k2=200,k3=1,采用空間矢量調制法。仿真結果如圖4~6所示。
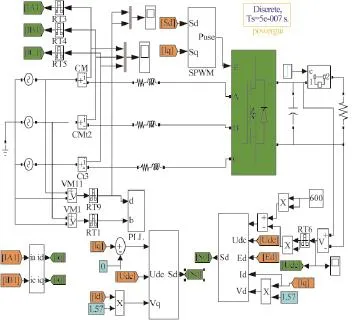
圖3 反步法無源控制仿真模型
圖4中(a)是采用的是反步法控制時的a相電壓、電流波形,(b)是啟動時,反步法和預測功率法控制時直流電壓波形圖對比,(c)是啟動時,反步法和預測功率法下a相電流對比。由圖4(b)、4(c)可知,在啟動過程中,應用反步法,響應速度較快。
(a)啟動時,a相電壓、電流波形
圖5中(a)是反步法和預測功率法控制時a相電流波形,圖(b)是反步法和預測功率法時直流電壓波形對比。從圖5可以看出,負載變化時,采用反步法,直流電壓、相電流變化較小。
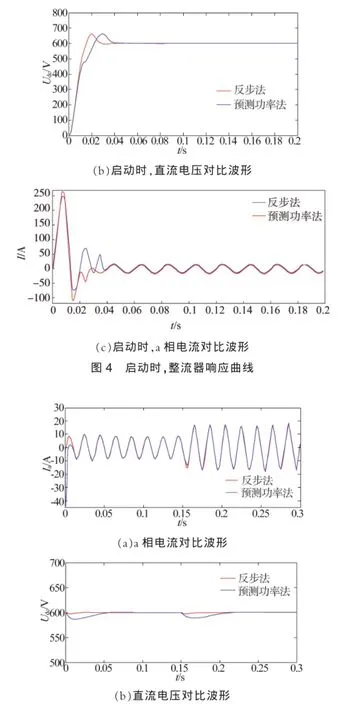
圖5 負載在0.15 s從100 Ω變為50 Ω整流器響應曲線
在0.1s時iq由0變為12A,在0.2s時再變為-12 A,仿真如圖6。由圖6可知,單位功率因數在0.1 s之后變為超前功率因數在0.2 s之后變為滯后功率因數;a相電壓沒有變化;a相相電流經過短暫時間就恢復到穩態;d軸電流幾乎保持不變;q軸電流很快到達設定值,直流電壓幾乎沒有變化。
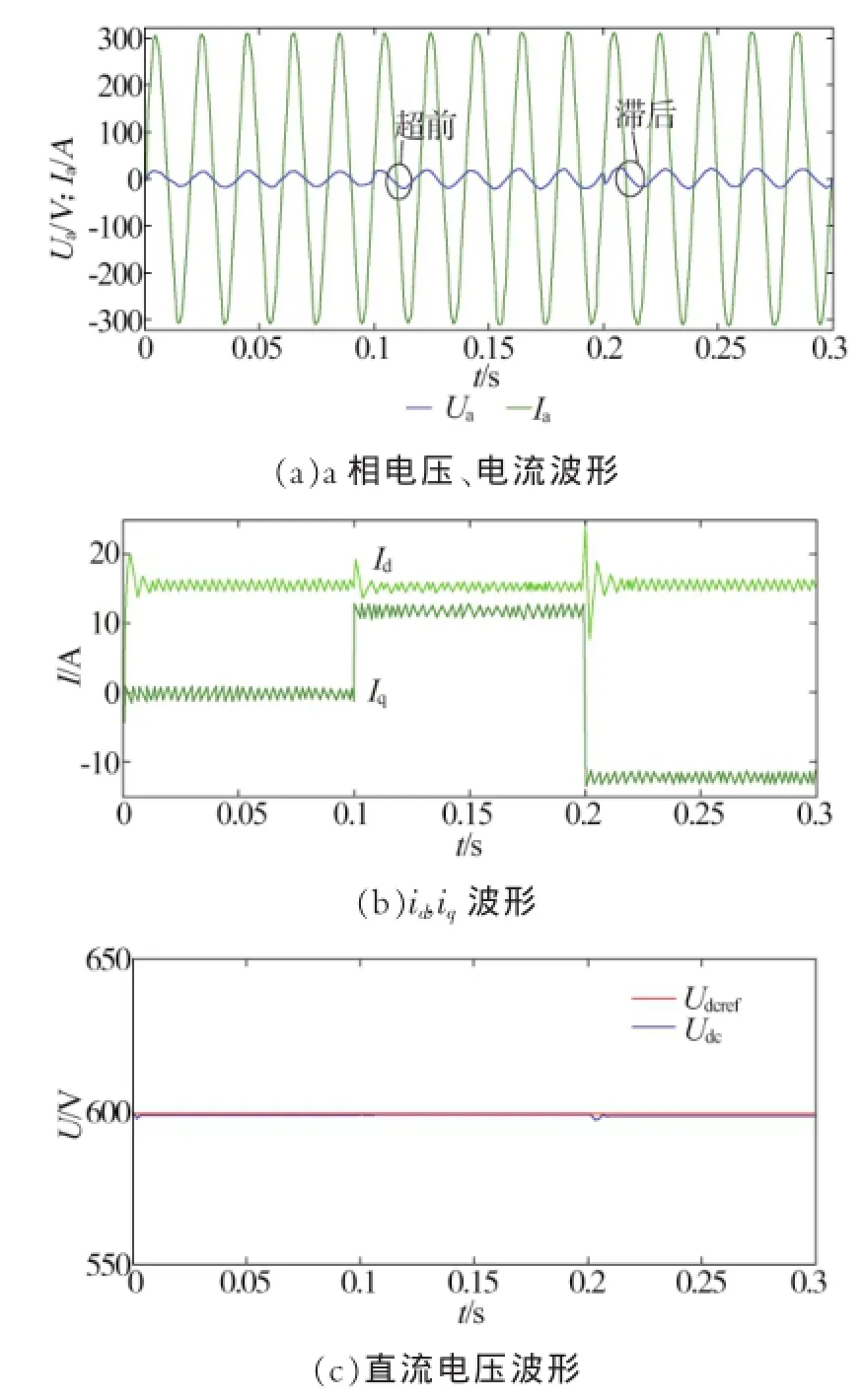
圖6 6iq變化時,整流器響應曲線
6 結語
為改善電壓型PWM整流器控制系統的動態、靜態性能,從整流器的數學模型入手,采用反步法,分別設計了直流電壓控制器和功率因數控制器。把電壓型PWM整流器的控制系統由多輸入多輸出系統分解為兩個單輸入單輸出的非線性系統。并在此基礎上,通過仿真對比分析證明該控制方法下動靜性能得到了較大的改善。
[1]張崇巍,張興.PWM整流器及其控制[M].北京:機械工業出版社,2003.
[2]汪萬偉,尹華杰,管霖.雙閉環矢量控制的電壓型PWM整流器參數整定[J].電工技術學報,2010,25(2):67-72.
[3]朱曉榮,李和明,彭詠龍,等.基于反步法的電流型PWM整流器控制策略[J].電工技術學報,2007,22(2):78-83.
[4]LI Z X,LI Y H,WANG P,et al.Control of three-phase boosttype PWM rectifier in stationary frame under unbalanced input voltage[J].IEEE Transactions on Power Electronics,2010,25 (10):2 521-2 530.
[5]楊興武,姜建國.電壓型PWM整流器預測直接功率控制[J].中國電機工程學報,2011,31(3):34-39
[6]徐彬,楊丹,王旭,等.電壓型 PWM整流器模糊邏輯功率預測控制略[J].電機與控制學報,2010,14(8):52-57.
[7]宋文祥,尹赟.一種基于內模控制的三相電壓型PWM整流器控制方法[J].電工技術學報,2012,27(12):94-10.
[8]王久和.電壓型PWM整流器的非線性控制[M].北京:機械工業出版社,2008.
Passivity-based Control of Voltage Source PWM Rectifier Based on Back-stepping
ZHANG Heng,ZHANG Chengxiang,HUA Chenbing,JIANG Deyu,WENG Haixia
(State Grid Linyi Power Supply Company,Linyi 276000,China)
There is a large DC voltage steady-state error and slow response speed of control system for passivity-based control of voltage source PWM rectifier when load changes and the three-phase unbalances.A dual single-input and single-output model is derived from multi-input,multi-output nonlinear model under the synchronous coordinate system through feedforward decoupling method.For each single input and output model,a globally asymptotically stable nonlinear control which can achieve the decoupling controlling of active current and reactive current is designed using back-stepping method. Simulation results verify the feasibility and effectiveness of the proposed method.
voltage source PWM rectifier;passivity-based control;back-stepping;single-input;single-output
TM721.1
A
1007-9904(2016)06-0022-05
2015-12-22
張恒(1988),男,工程師,從事電網規劃工作。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56