捷豹Jaguar XE新技術(shù)亮點(diǎn)(一)
2016-08-12 06:17:20鄭永
汽車維修技師 2016年1期
鄭 永
捷豹Jaguar XE新技術(shù)亮點(diǎn)(一)
鄭 永
作為一款真正屬于駕駛員的汽車,后輪驅(qū)動(dòng) Jaguar XE 以其先進(jìn)的輕質(zhì)構(gòu)造、流線造型、豪華內(nèi)飾和卓越的駕乘與操控性重新界定了豪華運(yùn)動(dòng)轎車的概念。Jaguar XE 成為 Jaguar 截至目前最具空氣動(dòng)力學(xué)特征的汽車,風(fēng)阻系數(shù)為0.26。Jaguar XE 為 Jaguar品牌引入了重要的新技術(shù),包括:
◆輕質(zhì)鋁制整體式車身
◆全新車載網(wǎng)絡(luò)和電氣系統(tǒng)
◆低二氧化碳排放發(fā)動(dòng)機(jī)、停止/啟動(dòng)功能、可達(dá)到 99g/km的最經(jīng)濟(jì)車型
◆車道偏離警告(LDW)
◆交通標(biāo)志識(shí)別(TWR)
◆抬頭顯示(HUD)
◆360°環(huán)車攝像頭和駐車輔助
◆自動(dòng)泊車
◆自動(dòng)緊急制動(dòng)(AEB)
◆InControl 音響系統(tǒng)
◆全 新 Jaguar 柴 油 發(fā) 動(dòng) 機(jī):Ingenium I4 2.0L柴油發(fā)動(dòng)機(jī)
◆電子助力轉(zhuǎn)向系統(tǒng)(EPAS)
◆全路況進(jìn)程控制(ASPC)
一、網(wǎng)絡(luò)通信
1.網(wǎng)絡(luò)拓?fù)鋱D
Jaguar XE采用新一代的多路CAN 總線系統(tǒng),使用4個(gè)不同速度的獨(dú)立總線網(wǎng)絡(luò),拓?fù)鋱D如圖1所示,說(shuō)明如表1~表6所示。控制模塊現(xiàn)在被分成四組,安裝到其相應(yīng)的網(wǎng)絡(luò)上,這四組網(wǎng)絡(luò)分別是:
(1)HS CAN-動(dòng)力傳動(dòng)系統(tǒng);
(2)HS CAN-底盤;
(3)MS CAN-車身;
(4)MS CAN-舒適系統(tǒng)。
2.診斷插座
診斷插座針腳如表7所示。
3.多路CAN說(shuō)明與操作

圖1 網(wǎng)絡(luò)拓?fù)鋱D
網(wǎng)關(guān)模塊(GWM)與車身控制模塊(BCM)合為一個(gè)模塊,在模塊外面沒(méi)有保險(xiǎn)絲和繼電器。網(wǎng)關(guān)的多CAN 收發(fā)器允許同時(shí)連接所有網(wǎng)絡(luò)。CPU 能夠執(zhí)行多個(gè)信息篩選和信息存儲(chǔ)緩沖。任何信息,不論運(yùn)行速度或優(yōu)先級(jí)如何,均可通過(guò)網(wǎng)關(guān)非常高效地從一個(gè)網(wǎng)絡(luò)傳輸?shù)搅硪粋€(gè)網(wǎng)絡(luò),同時(shí)對(duì)網(wǎng)絡(luò)運(yùn)行負(fù)載的干擾最小。
每個(gè)網(wǎng)絡(luò)都相互獨(dú)立地運(yùn)行,各個(gè)網(wǎng)絡(luò)的總線負(fù)載和穩(wěn)定性得到了優(yōu)化。為了增強(qiáng)車輛系統(tǒng)的功能,任何連接到CAN 總線的控制模塊均能夠與連接到CAN 總線的任何其他控制模塊進(jìn)行通信,而不論它們連接的是哪個(gè)網(wǎng)絡(luò)。為了防止網(wǎng)絡(luò)故障并降低網(wǎng)絡(luò)負(fù)載,一些控制模塊連接多個(gè)網(wǎng)絡(luò)。在萬(wàn)一發(fā)生網(wǎng)絡(luò)故障的情況下,仍可將基本數(shù)據(jù)從這些模塊傳輸?shù)狡渌W(wǎng)絡(luò)連接。這使得該網(wǎng)絡(luò)上的模塊能夠正常運(yùn)行。這些模塊不負(fù)責(zé)將信息從一個(gè)網(wǎng)絡(luò)傳輸?shù)搅硪粋€(gè)網(wǎng)絡(luò);盡管它們有兩個(gè)CAN連接,但網(wǎng)絡(luò)仍被有效地分隔。
二、電源分配
電源控制示意圖如圖2所示,在Jaguar XE 中,網(wǎng)關(guān)模塊(GWM)位于車身控制模塊(BCM)內(nèi),形成一個(gè)組合單元。在此模塊中,GWM不斷監(jiān)測(cè)單個(gè)主蓄電池的狀況。 由蓄電池監(jiān)測(cè)系統(tǒng)(BMS)控制模塊提供的數(shù)據(jù)通過(guò) LIN 總線 1 傳輸至GWM。 當(dāng)發(fā)動(dòng)機(jī)運(yùn)行時(shí),為了保持蓄電池充電狀態(tài),GWM 使用負(fù)載管理軟件進(jìn)行計(jì)算,然后通過(guò) LIN 總線3 將充電負(fù)荷請(qǐng)求發(fā)送到發(fā)電機(jī)。通過(guò)安裝靜態(tài)電流控制模塊(QCCM),采取了措施以避免蓄電池過(guò)度放電。QCCM 通過(guò)兩個(gè)繼電器向音頻/娛樂(lè)和氣候控制系統(tǒng)供電。不論何種車輛工況,如果檢測(cè)到過(guò)度放電情況,GWM 則使用 LIN 總線 1 將命令發(fā)送到QCCM,以打開(kāi)兩個(gè)集成繼電器,從而切斷 QCCM 保險(xiǎn)絲的供電。

表1 BCM控制的LIN模塊

表2 車身中速CAN(BO MS CAN)模塊

表3 動(dòng)力高速CAN(PT HS CAN)模塊

表4 底盤高速CAN(CH HS CAN)模塊

表5 舒適中速CAN(CO MS CAN)模塊

表6 音響娛樂(lè)模塊
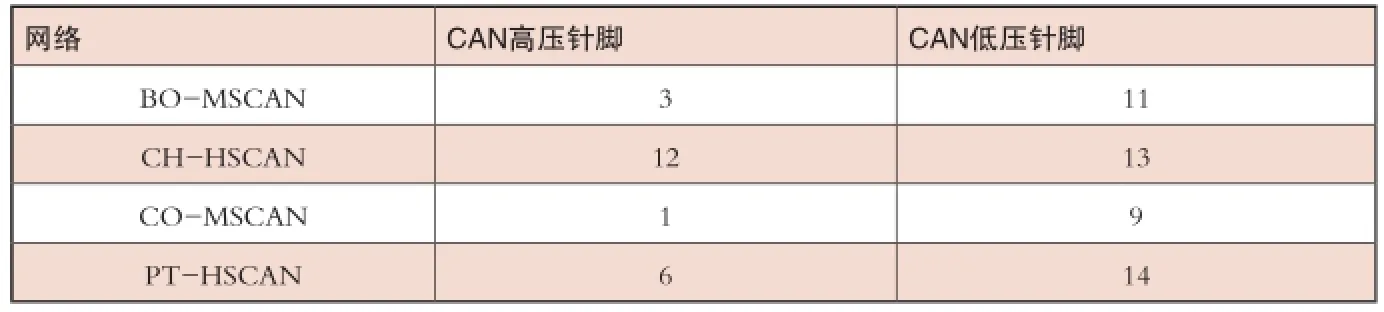
表7 診斷插座針腳說(shuō)明

圖2 電源控制示意圖

圖3 電源分配示意圖
電源分配示意圖如圖3所示,蓄電池接線盒(BJB)直接連接到蓄電池正極端子,并向車輛其他保險(xiǎn)絲盒分配永久電源。電源被分配至前部發(fā)動(dòng)機(jī)艙接線盒(EJB)、后部EJB、駕駛室乘客側(cè)接線盒(PJB)、后部后備箱接線盒(RJB)、BCM/GWM、電壓質(zhì)量模塊(VQM)和 QCCM。這些部件再次進(jìn)行電源分配,以向車內(nèi)安裝的所有電氣系統(tǒng)供電(使用保險(xiǎn)絲和繼電器)。當(dāng)執(zhí)行自動(dòng)啟動(dòng)時(shí),啟動(dòng)機(jī)電機(jī)電流可導(dǎo)致車輛電氣系統(tǒng)出現(xiàn)電壓降。 這會(huì)導(dǎo)致電氣系統(tǒng)暫時(shí)關(guān)閉然后再次打開(kāi),給乘客帶來(lái)不便。在自動(dòng)啟動(dòng)情形下,電壓質(zhì)量模塊(VQM)可保護(hù) BJB 中的保險(xiǎn)絲 PF07的輸出不受電壓降的影響。當(dāng)發(fā)動(dòng)機(jī)控制模塊執(zhí)行自動(dòng)啟動(dòng)時(shí),GWM 使用 LIN 總線 2 網(wǎng)絡(luò)命令 VQM 激活。VQM 為所有與BJB 中保險(xiǎn)絲 PF07 相連接的耗電元件提供穩(wěn)定的電壓輸出。
三、駕駛員提醒與輔助系統(tǒng)
駕駛員輔助系統(tǒng)的目的在于改進(jìn)駕駛員的駕駛體驗(yàn),同時(shí)提高車輛的安全性。以下系統(tǒng)主動(dòng)監(jiān)測(cè)前方道路并發(fā)出警告,在某些情況下還與其他車輛系統(tǒng)配合進(jìn)行調(diào)整(如果需要):
◆交通標(biāo)志識(shí)別(TSR):持續(xù)監(jiān)控道路標(biāo)志以使駕駛員實(shí)時(shí)了解速度限值和道路限制,無(wú)論是臨時(shí)還是永久。這允許駕駛員集中注意力安全地駕駛車輛
◆自動(dòng)遠(yuǎn)光燈(AHB):持續(xù)監(jiān)測(cè)前方道路有無(wú)光源。 這允許僅在需要時(shí)調(diào)整遠(yuǎn)光燈,為前方道路提供最佳照明
◆車道偏離警告(LDW):持續(xù)監(jiān)控道路和駕駛員操作,因此,它可以在移動(dòng)中主動(dòng)檢測(cè)車道偏移
◆自動(dòng)緊急制動(dòng)(AEB):是Jaguar XE 上裝配的安全系統(tǒng),用于減少碰撞機(jī)會(huì)或減小碰撞即將發(fā)生時(shí)的沖擊作用
以上新技術(shù)首次在 Jaguar 上采用(安裝在 Jaguar XE 上)得益于全新的圖像處理控制模塊,該模塊用于監(jiān)控前方道路以提供精確信息。
1.圖像處理控制模塊(IPCM)
圖像處理控制模塊(IPCM) 如圖4所示,圖像處理控制模塊安裝在后視鏡中。它是一個(gè)立體攝像頭,用于監(jiān)控主車前方的道路是否有危險(xiǎn)標(biāo)志。立體攝像頭的 3D 效果改進(jìn)了障礙物的檢測(cè),并更精確地計(jì)算大小和距離測(cè)量值。攝像頭處于立體模式時(shí),可查看主車前方 80m的范圍。 攝像頭具有 21.9°水平視角和 12.2°垂直視角,并以每秒30幀的頻率顯示。圖像處理控制模塊通過(guò)底盤 CAN 系統(tǒng)進(jìn)行通信。該模塊頂部安裝了一個(gè)冷卻風(fēng)扇,以使其以最佳工作溫度運(yùn)行。 冷卻風(fēng)扇安裝在圖像處理控制模塊裝飾蓋內(nèi)。
2.交通標(biāo)志識(shí)別(TSR)
交通標(biāo)志識(shí)別(TSR)示意圖如圖5所示,控制框圖如圖6所示。TSR 利用圖像處理控制模塊識(shí)別道路兩側(cè)的交通標(biāo)志,并通過(guò)抬頭顯示(HUD)和儀表(IC)顯示屏向駕駛員提供關(guān)于最新檢測(cè)到的速度限值、取消標(biāo)志和超車規(guī)定等信息。圖像處理控制模塊可捕捉道路場(chǎng)景的圖像數(shù)據(jù)。攝像頭推斷暗含的速度限值并讀取場(chǎng)景中的標(biāo)志;此系統(tǒng)被稱為“視線系統(tǒng)”。圖像處理控制模塊還通過(guò)車輛控制器局域網(wǎng) (CAN) 總線從導(dǎo)航系統(tǒng)獲取關(guān)于當(dāng)前道路的信息。圖像處理控制模塊將來(lái)自導(dǎo)航和視線系統(tǒng)的可用速度限值信息綜合到一起,提供更準(zhǔn)確更一致的速度限值。 這個(gè)系統(tǒng)被稱為“融合系統(tǒng)”。
維也納公約國(guó)家和北美地區(qū)的速度限值會(huì)顯示給駕駛員。 駕駛員也可以利用系統(tǒng)來(lái)提供超速警告,即將系統(tǒng)配置為當(dāng)車輛速度超過(guò)顯示限值并在達(dá)到設(shè)定數(shù)值時(shí)在顯示屏中閃爍速度限值標(biāo)志。可以通過(guò)儀表菜單打開(kāi)和關(guān)閉速度警示。 打開(kāi)速度警示時(shí),駕駛員可以調(diào)整菜單設(shè)置,以顯示三種不同的速度警告:

圖4 圖像處理控制模塊(IPCM)

圖5 交通標(biāo)志識(shí)別(TSR)示意圖
◆車輛速度等于檢測(cè)到的速度限值
◆車輛速度比檢測(cè)到的速度限值高 10km/h
◆車輛速度比檢測(cè)到的速度限值高 20km/h
對(duì)于沒(méi)有標(biāo)志的道路,顯示來(lái)自導(dǎo)航系統(tǒng)的速度限值信息。如果導(dǎo)航系統(tǒng)不可用,TSR 系統(tǒng)將只使用攝像頭,但不能執(zhí)行全部功能。可以通過(guò)儀表菜單打開(kāi)和關(guān)閉 TSR。該系統(tǒng)可在最大速度為 250km/h的車速范圍內(nèi)工作。在以下情況下,TSR 系統(tǒng)的性能也會(huì)受到影響:
◆與路面相比,標(biāo)志的俯仰、側(cè)傾或偏轉(zhuǎn)角度超過(guò) 15°
◆標(biāo)志被隱匿或覆蓋
◆道路標(biāo)志不合格,導(dǎo)航數(shù)據(jù)的準(zhǔn)確性和有效性不足
◆在導(dǎo)航系統(tǒng)未覆蓋的區(qū)域中行駛
◆在陽(yáng)光直射下行駛,導(dǎo)致過(guò)度曝光和對(duì)比度下降
◆車輛未處于支持此功能的國(guó)家
如果發(fā)生系統(tǒng)故障,此功能會(huì)被抑制,直至故障得到修復(fù)。通過(guò) IC 文本信息和警告符號(hào)向駕駛員通知故障。

圖6 交通標(biāo)志識(shí)別(TSR)控制框圖
(待續(xù))
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
汽車電器(2018年1期)2018-06-05 01:22:54
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
