五軸聯(lián)動精密微銑削機(jī)床試驗(yàn)?zāi)B(tài)分析
2016-08-13 03:51:17許金凱張向輝于化東
中國測試 2016年7期
李 偉,許金凱,張向輝,于化東
(長春理工大學(xué)機(jī)電工程學(xué)院,吉林 長春 130022)
五軸聯(lián)動精密微銑削機(jī)床試驗(yàn)?zāi)B(tài)分析
李偉,許金凱,張向輝,于化東
(長春理工大學(xué)機(jī)電工程學(xué)院,吉林 長春 130022)
五軸聯(lián)動精密微銑削機(jī)床的結(jié)構(gòu)性能直接影響精密三維微小零件的加工質(zhì)量,為研究其結(jié)構(gòu)性能,應(yīng)用試驗(yàn)?zāi)B(tài)分析技術(shù)對五軸聯(lián)動精密微銑削機(jī)床進(jìn)行結(jié)構(gòu)分析。采用單點(diǎn)激勵多點(diǎn)響應(yīng)的方法進(jìn)行錘擊試驗(yàn),建立傳遞函數(shù),經(jīng)分析處理得出機(jī)床固有頻率、阻尼比與振型等動態(tài)特性參數(shù),并對識別的參數(shù)進(jìn)行模態(tài)置信矩陣(MAC)校驗(yàn)。試驗(yàn)得到機(jī)床前三階固有頻率為102.44,133.97,154.86Hz,對應(yīng)阻尼比為3.27%、4.94%、2.14%;試驗(yàn)結(jié)果證明該五軸精密微銑削機(jī)床結(jié)構(gòu)布局合理,機(jī)床固有頻率有效避開微切削加工的激振頻率,通過振型分析可找出機(jī)床結(jié)構(gòu)薄弱環(huán)節(jié),并提出優(yōu)化建議。試驗(yàn)驗(yàn)證應(yīng)用試驗(yàn)?zāi)B(tài)分析技術(shù)對機(jī)床動態(tài)特性分析方法的有效性。
模態(tài)分析;模態(tài)參數(shù);試驗(yàn)?zāi)B(tài);五軸聯(lián)動
0 引 言
隨著航空航天、國防工業(yè)、微電子工業(yè)、現(xiàn)代醫(yī)學(xué)以及生物工程技術(shù)的發(fā)展,對精密/超精密三維微小零件的需求日益迫切,同時也對微機(jī)械加工設(shè)備技術(shù)提出更高的要求[1]。五軸聯(lián)動精密微銑削機(jī)床集計(jì)算機(jī)控制、高性能伺服驅(qū)動和精密加工于一體,可高效、準(zhǔn)確完成精密三維微小復(fù)雜曲面的加工,特別是在加工微小葉輪、葉片等方面具有獨(dú)特的優(yōu)勢[2]。而五軸聯(lián)動精密微銑削機(jī)床的結(jié)構(gòu)性能是保證加工質(zhì)量的重要條件,因此,建立機(jī)床結(jié)構(gòu)準(zhǔn)確的動力學(xué)模型,研究其動態(tài)特性,對于了解機(jī)床的薄弱環(huán)節(jié)、進(jìn)行結(jié)構(gòu)優(yōu)化、提高機(jī)床的加工精度和穩(wěn)定性具有重要意義[3]。
模態(tài)分析是進(jìn)行結(jié)構(gòu)性能研究的重要方法,一般包括計(jì)算模態(tài)分析和試驗(yàn)?zāi)B(tài)分析,計(jì)算模態(tài)分析主要是通過建立有限元模型來簡化模擬實(shí)際結(jié)構(gòu)進(jìn)行分析計(jì)算[4-5],通過有限元軟件可以直觀地看到模型在各階固有頻率下的振型動畫;試驗(yàn)?zāi)B(tài)分析(EMA),是通過對激勵和響應(yīng)信號進(jìn)行參數(shù)識別得到結(jié)構(gòu)模態(tài)參數(shù)(頻率、阻尼比及振型)的方法[6-7],更加適用于復(fù)雜或者大型的結(jié)構(gòu)。由于五軸聯(lián)動精密微銑削機(jī)床結(jié)構(gòu)比較復(fù)雜,有限元分析的方法往往難以模擬實(shí)際情況,難以得到準(zhǔn)確的結(jié)果,因此本文擬采用試驗(yàn)?zāi)B(tài)分析技術(shù)對五軸聯(lián)動精密微銑削機(jī)床進(jìn)行結(jié)構(gòu)動態(tài)性能分析,提取出機(jī)床的固有頻率、阻尼比與振型,并進(jìn)行MAC矩陣校驗(yàn),找出機(jī)床結(jié)構(gòu)存在的薄弱環(huán)節(jié),為機(jī)床結(jié)構(gòu)優(yōu)化提供依據(jù)。
1 試驗(yàn)?zāi)B(tài)分析基本理論
模態(tài)分析識別的是與激勵無關(guān)的結(jié)構(gòu)固有特性(固有頻率、阻尼比、振型等)。根據(jù)這些參數(shù),就能夠計(jì)算結(jié)構(gòu)在特定激勵下的動力學(xué)響應(yīng)。研究系統(tǒng)的固有振動特性,首先要建立該系統(tǒng)的動力學(xué)方程,對于一個n自由度線性系統(tǒng),其運(yùn)動微分方程為

式中:[M]——質(zhì)量矩陣;
[C]——阻尼矩陣;
[K]——剛度矩陣;
應(yīng)、速度響應(yīng)和位移響應(yīng)向量;
{f(t)}——激振力向量,當(dāng)f(t)=0時為自由振
動微分方程。
式(1)是用系統(tǒng)的物理坐標(biāo)描述的運(yùn)動方程組,在其每一個方程中均包含系統(tǒng)各點(diǎn)的物理坐標(biāo),因此是一組耦合方程。當(dāng)系統(tǒng)自由度數(shù)目很大時,求解十分困難。所謂模態(tài)分析是將上述線性定常系統(tǒng)振動微分方程組中的物理坐標(biāo)變換為模態(tài)坐標(biāo),使方程組解耦,從而求出系統(tǒng)的各階模態(tài)參數(shù),坐標(biāo)變換的變換矩陣為模態(tài)矩陣,其每列為模態(tài)振型[8]。這就是模態(tài)分析的經(jīng)典定義。
對式(1)進(jìn)行傅里葉變換,引入模態(tài)坐標(biāo),利用實(shí)對稱矩陣的正交性,分別對系統(tǒng)質(zhì)量、阻尼和剛度矩陣和傳遞函數(shù)矩陣做正交化處理,設(shè)系統(tǒng)的初始狀態(tài)為零,可得激勵點(diǎn)i與響應(yīng)點(diǎn)j之間的頻響函數(shù)為


式中:mr、kr、cr——第r階模態(tài)質(zhì)量、模態(tài)剛度和模態(tài)阻尼;
ζr、ωr、φr——第r階模態(tài)阻尼比、固有頻率和主振型向量。
在試驗(yàn)?zāi)B(tài)分析中,采集對結(jié)構(gòu)所施加的激勵以及相應(yīng)的響應(yīng),然后計(jì)算激勵點(diǎn)到拾振點(diǎn)的傳遞函數(shù)。傳遞函數(shù)矩陣中的任一行或任一列元素,都包含了模態(tài)矩陣的全部信息,各階模態(tài)參數(shù)(固有頻率、模態(tài)剛度、模態(tài)質(zhì)量、模態(tài)阻尼比、主振型向量)可以通過識別和擬合的方法加以確定。測量一列的傳遞函數(shù)即為固定激勵點(diǎn),移動傳感器到各點(diǎn)測量響應(yīng),測量一行的傳遞函數(shù)即為固定傳感器到一點(diǎn),在各個測點(diǎn)進(jìn)行激勵。兩種方法都可以獲得全部的模態(tài)信息。
2 機(jī)床模態(tài)試驗(yàn)
五軸聯(lián)動精密微銑削機(jī)床主體結(jié)構(gòu)由龍門框架和雙回轉(zhuǎn)工作臺組成,整體尺寸為680mm×660mm× 600mm,工作空間尺寸為150mm×150mm×100mm,主軸最高轉(zhuǎn)速為80000r/min,機(jī)床定位精度為0.5μm,重復(fù)定位精度0.1μm。
對機(jī)床進(jìn)行錘擊模態(tài)試驗(yàn),首先要建立機(jī)床節(jié)點(diǎn)模型,確定模態(tài)試驗(yàn)測量點(diǎn)和激勵點(diǎn),然后布置加速度傳感器到各個測量點(diǎn)上,連接到數(shù)據(jù)采集儀,然后用力錘對機(jī)床進(jìn)行激勵,用數(shù)據(jù)采集儀采集激勵源數(shù)據(jù)和機(jī)床的不同節(jié)點(diǎn)加速度數(shù)據(jù),再經(jīng)過數(shù)據(jù)分析處理,從機(jī)床系統(tǒng)的傳遞函數(shù)即FRFs中提取機(jī)床的模態(tài)參數(shù),主要包括固有頻率、模態(tài)阻尼、模態(tài)振型等。
2.1試驗(yàn)條件
試驗(yàn)采用德國M+p公司的VibRunner振動信號采集儀采集和存儲數(shù)據(jù),錘擊激勵采用量稱為5000N,錘頭為鋁合金材質(zhì)的力錘,經(jīng)電荷放大器連接至VibRunner振動信號采集儀,響應(yīng)拾取采用Kistler公司±50g和±100g的三向加速度傳感器,數(shù)據(jù)后處理采用M+p公司的So Analyzer數(shù)據(jù)采集與分析系統(tǒng)對采集的數(shù)據(jù)進(jìn)行數(shù)據(jù)分析和參數(shù)識別。試驗(yàn)?zāi)B(tài)測試系統(tǒng)如圖1所示。
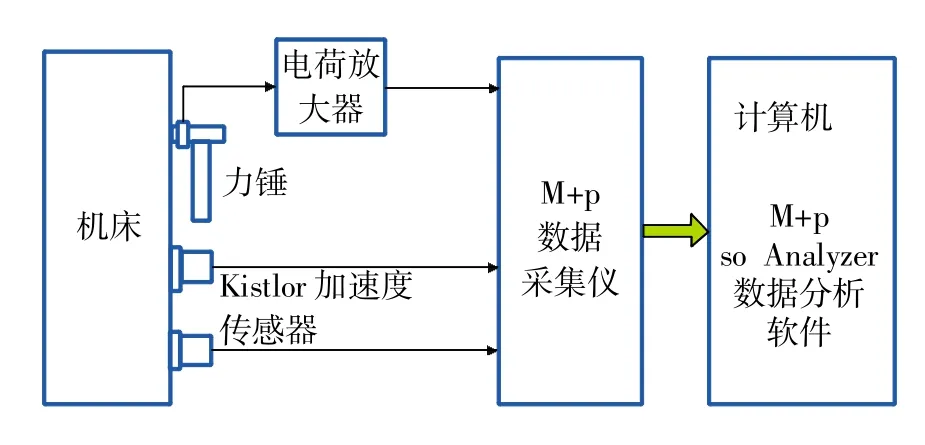
圖1 試驗(yàn)?zāi)B(tài)測試系統(tǒng)
2.2試驗(yàn)建模
本次試驗(yàn)共建立80個節(jié)點(diǎn),為減少工作量,將距離較近的4個點(diǎn)設(shè)置為線性從動點(diǎn),最終測量點(diǎn)為76個。將加速度傳感器用蠟粘在各個測量點(diǎn)對應(yīng)的機(jī)床點(diǎn),傳感器測量方向?qū)?yīng)節(jié)點(diǎn)模型相應(yīng)的方向,信號線連在M+p數(shù)據(jù)采集儀的輸入通道。
由于機(jī)床為對稱結(jié)構(gòu),為了得到更好的響應(yīng),激勵點(diǎn)應(yīng)設(shè)置為機(jī)床的中間部位,由于機(jī)床底座采用抗振性較好的大理石材料,對龍門結(jié)構(gòu)的激勵難以激發(fā)雙轉(zhuǎn)臺的響應(yīng),故需要確定兩個激勵點(diǎn),第1點(diǎn)為z軸滑臺與橫梁連接處,第2點(diǎn)為雙轉(zhuǎn)臺的邊緣處,分別激發(fā)龍門結(jié)構(gòu)和雙轉(zhuǎn)臺的響應(yīng),分別進(jìn)行模態(tài)參數(shù)識別,相當(dāng)于進(jìn)行兩次錘擊模態(tài)試驗(yàn)。節(jié)點(diǎn)模型及激勵點(diǎn)位置如圖2所示。
2.3試驗(yàn)參數(shù)設(shè)置
根據(jù)前述的模態(tài)理論分析可知,只需要測量一行或者一列的傳遞函數(shù)便可識別系統(tǒng)的模態(tài)參數(shù),本次采用固定敲擊點(diǎn),移動傳感器到各個測點(diǎn)的方法來獲取傳遞函數(shù)。為得到盡可能好的數(shù)據(jù),減小環(huán)境、人為因素等造成的誤差,對每次錘擊實(shí)驗(yàn)進(jìn)行4次敲擊取平均值,并且對力信號加力窗,對響應(yīng)信號加指數(shù)窗。設(shè)置好參數(shù)后對機(jī)床進(jìn)行敲擊試驗(yàn),敲擊時觀察每次的力譜曲線,及時剔除掉不好的數(shù)據(jù)。
3 模態(tài)試驗(yàn)結(jié)果及校驗(yàn)
在So Analyzer軟件中對測得的傳遞函數(shù)進(jìn)行分析處理,采用多自由度(MDOF)模態(tài)分析模塊,截止頻率設(shè)為600 Hz,采用時域識別模態(tài)的方法即PloyTime進(jìn)行模態(tài)參數(shù)識別,得到如表1所示龍門結(jié)構(gòu)和雙轉(zhuǎn)臺各階固有頻率、阻尼比及主要振型。圖3所示為龍門結(jié)構(gòu)前6階振型圖,圖4所示為雙轉(zhuǎn)臺結(jié)構(gòu)前4階振型圖。
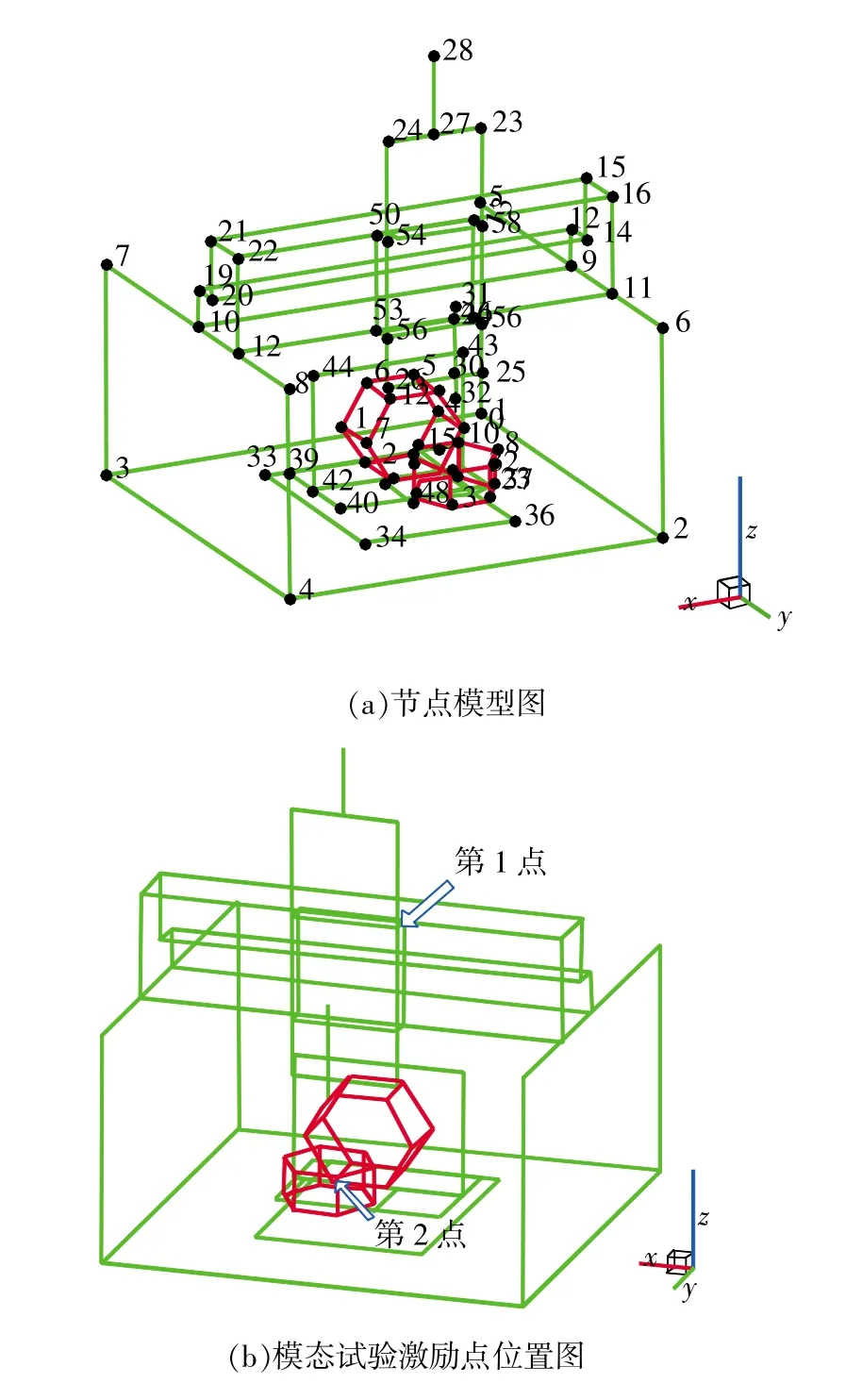
圖2 So Analyzer節(jié)點(diǎn)模型構(gòu)建及激勵點(diǎn)位置
模態(tài)置信矩陣(MAC),是評價模態(tài)向量空間交角的一個很好的工具,MAC矩陣含有所有可能的向量對的MAC值,描述同一模態(tài)的兩個向量,其MAC值應(yīng)當(dāng)接近于1,描述不同模態(tài)的兩個向量之MAC值一般都小于0.1接近于0[9]。對本次試驗(yàn)得到的模態(tài)參數(shù)進(jìn)行模態(tài)參數(shù)校驗(yàn),得到如圖5所示的MAC矩陣,可以看到機(jī)床模態(tài)試驗(yàn)提取的龍門結(jié)構(gòu)和雙轉(zhuǎn)臺的模態(tài)向量正交性比較好,模態(tài)參數(shù)比較準(zhǔn)確,模態(tài)試驗(yàn)結(jié)果可信度比較高。
根據(jù)以上試驗(yàn)?zāi)B(tài)結(jié)果,可以得出以下結(jié)論:
1)五軸聯(lián)動精密微銑削機(jī)床龍門結(jié)構(gòu)在前600Hz內(nèi)有6階模態(tài),雙轉(zhuǎn)臺在前600Hz內(nèi)有4階模態(tài),模態(tài)分布比較密集,若在建立節(jié)點(diǎn)模型時布入更多的點(diǎn),分析時提取出更多的模態(tài),必定會有局部模態(tài)的出現(xiàn)[10]。
2)由頻率與轉(zhuǎn)速的關(guān)系可知,主軸轉(zhuǎn)速最高為80 000 r/min,加工激振頻率最大值為1 000 Hz,通常微切削加工時主軸轉(zhuǎn)速取1000 r/min的整數(shù)倍,由龍門結(jié)構(gòu)的第1階頻率和雙轉(zhuǎn)臺的第4階頻率可知,主軸轉(zhuǎn)速在6000r/min和30000r/min時容易引發(fā)共振,加工時應(yīng)盡量避免采用上述轉(zhuǎn)速,其他模態(tài)結(jié)果都避開了加工時的激振頻率。

表1 試驗(yàn)?zāi)B(tài)分析結(jié)果
4)機(jī)床的大理石底座和支座變形很小,起到了很好的減振隔振效果。
5)由龍門機(jī)構(gòu)的第1、4階振型圖可知,z軸滑臺與橫梁連接處剛度不足,需要加強(qiáng)橫梁與z軸滑臺的連接以改善其擺動。
6)由于雙轉(zhuǎn)臺結(jié)構(gòu)c軸轉(zhuǎn)臺延伸比較長,其結(jié)構(gòu)與懸臂梁類似,材料主要以鋁合金為主,由雙轉(zhuǎn)臺的振型圖看以看出轉(zhuǎn)臺剛度不足。建議加長b軸轉(zhuǎn)臺與c軸轉(zhuǎn)臺連接處三角形肋板,或者在c軸底部加肋板以提高對c軸轉(zhuǎn)臺的支撐剛度,另外b軸轉(zhuǎn)臺與大理石底座的轉(zhuǎn)接板應(yīng)加厚或加肋板以提高整個雙轉(zhuǎn)臺的剛度。
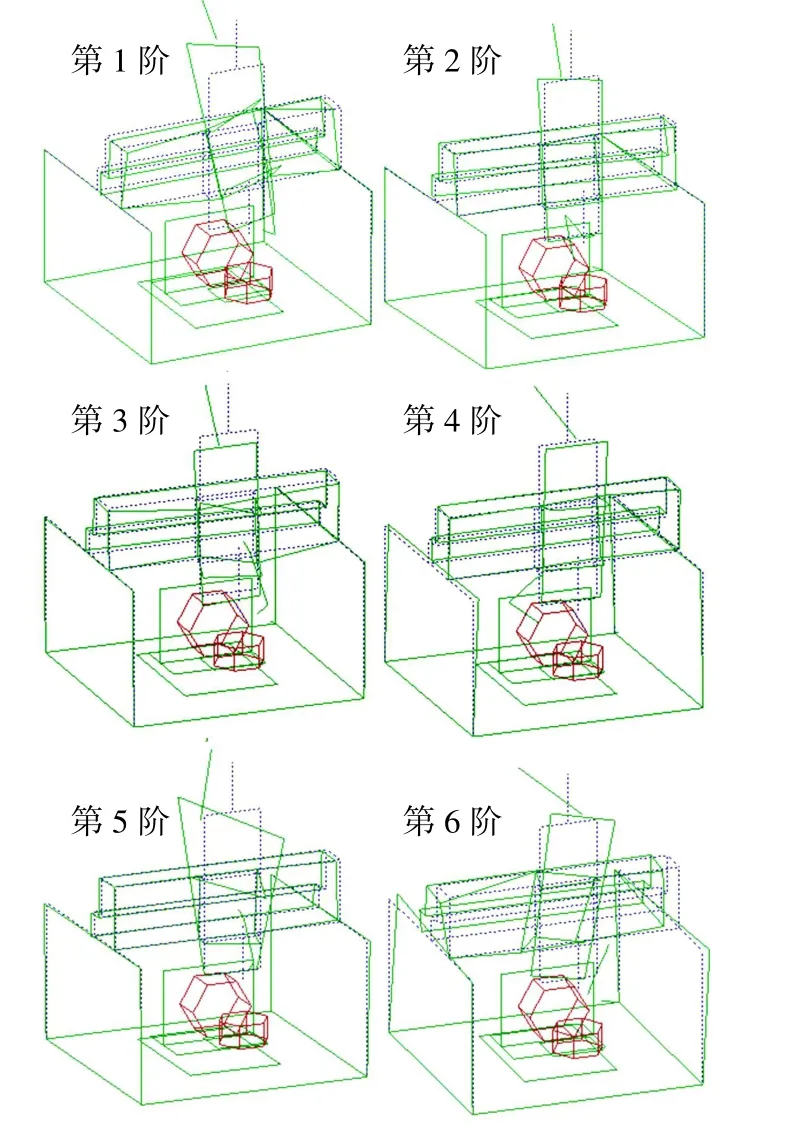
圖3 龍門結(jié)構(gòu)的前6階振型

圖4 雙轉(zhuǎn)臺前4階振型

圖5 模態(tài)MAC矩陣圖
4 結(jié)束語
五軸聯(lián)動精密微銑削機(jī)床可以實(shí)現(xiàn)精密三維微小零件加工,機(jī)床結(jié)構(gòu)的性能的好壞直接影響到加工質(zhì)量的高低。通過對機(jī)床的模態(tài)試驗(yàn)可以求得模態(tài)頻率、模態(tài)振型及模態(tài)阻尼等動態(tài)特性參數(shù),對其動態(tài)特性有全面的了解,從而評價機(jī)床的動態(tài)特性,為機(jī)床結(jié)構(gòu)的改進(jìn)、優(yōu)化提供了客觀的試驗(yàn)數(shù)據(jù)。試驗(yàn)得到機(jī)床的前三階固有頻率為102.44,133.97,154.86Hz,對應(yīng)阻尼比為3.27%、4.94%、2.14%,分析結(jié)果驗(yàn)證了五軸精密微銑削機(jī)床結(jié)構(gòu)性能優(yōu)良,滿足微切削加工要求,表明利用試驗(yàn)?zāi)B(tài)分析技術(shù)對機(jī)床進(jìn)行結(jié)構(gòu)分析具有重要的應(yīng)用價值和現(xiàn)實(shí)意義。
[1]于化東.超精密微機(jī)械制造技術(shù)研究進(jìn)展[J].長春理工大學(xué)學(xué)報(自然科學(xué)版),2008,31(3):1-8.
[2]沈超,賈歆瑩,化春雷,等.五軸聯(lián)動機(jī)床的誤差補(bǔ)償與優(yōu)化研究[J].機(jī)床電器,2011(2):22-25.
[3]李奎,汪惠芬,劉婷婷.數(shù)控機(jī)床動態(tài)特性優(yōu)化[J].機(jī)械設(shè)計(jì),2011,28(5):75-78.
[4]韓江,胡春陽,夏鏈,等.FM6324立式加工中心工作臺組件的ANSYS模態(tài)分析及優(yōu)化[J].合肥工業(yè)大學(xué)學(xué)報(自然科學(xué)版),2012,35(8):1039-1042.
[5]王楓,崔建昆.基于ABAQUS的碟式分離機(jī)立軸結(jié)構(gòu)模態(tài)分析[J].機(jī)械工程與自動化,2015(1):63-64.
[6]唐學(xué)哲,盧波,鄭艷琴,等.SL500/HZ超精密平面磨床的試驗(yàn)?zāi)B(tài)分析[J].機(jī)電工程,2011,28(4):432-435.
[7]曾發(fā)林,阮洋,李建康.基于PolyMAX的汽車駕駛室系統(tǒng)試驗(yàn)?zāi)B(tài)分析[J].鄭州大學(xué)學(xué)報(工學(xué)版),2015,36(3):54-58.
[8]傅志方,華宏星.模態(tài)分析理論與應(yīng)用[M].上海:上海交通大學(xué)出版社,2000:217-225.
[9]沃德·海倫,斯蒂芬·拉門茲,波爾·薩斯.模態(tài)分析理論與試驗(yàn)[M].白化同,郭繼忠,譯.北京:北京理工大學(xué)出版社,2001:64.
[10]李慶齡.5-UPS/PRPU并聯(lián)機(jī)床的動態(tài)特性分析[D].秦皇島:燕山大學(xué),2006.
(編輯:劉楊)
Experimental modal analysis of five-axis precision micro-milling machine tool
LI Wei,XU Jinkai,ZHANG Xianghui,YU Huadong
(Electromechanical Engineering College,Changchun University of Science and Technology,Changchun 130022,China)
The performance of five-axis linkage precision micro-milling machine tool structure has direct influence on the quality of machining 3D precision micro components.In order to study the propertyofthemachinetoolstructure,itwasanalyzedwithexperimentalmodalanalysis technique.The hammer test was conducted by the method of a single-point excitation and multipoint response,and the transfer functions were set up.Dynamic characteristic parameters of the machine tool structure including its natural frequencies,damping ratios and vibration modes were obtained by the analysis and processing.Also,the modal parameters were verified by the modal assurance criterion(MAC).The first three of the natural frequencies obtained by the experiment are 102.44Hz,133.97 Hz and 154.86Hz and the corresponding damping ratios are 3.27%,4.94% and 2.14%.The experiment proves that the structure of the five-axis linkage precision micromilling machine tool is reasonable and the natural frequencies can effectively avoid the vibration frequencies of the micro cutting process.The weak links of the machine tool structure were discovered by the analysis of the vibration modes.Optimization suggestions were put forward.It proves that the experimental modal analysis technique for studying the dynamic characteristics of the machine tools is effective.
modal analysis;modal parameters;experimental modal;five-axis linkage
A
1674-5124(2016)07-0123-04
10.11857/j.issn.1674-5124.2016.07.025
2015-10-10;
2015-11-26
國家自然科學(xué)基金項(xiàng)目(51275056)
李偉(1990-),男,河北張家口市人,碩士研究生,專業(yè)方向?yàn)槲⒓?xì)切削加工與微機(jī)械制造。
于化東(1961-),男,吉林松原市人,教授,博導(dǎo),研究方向?yàn)榫艹芗庸ぁ⑽⒓?xì)切削加工與微機(jī)械制造、高速切削加工技術(shù)。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
