民用飛機儀表自動著陸系統控制律設計
2016-08-16 10:43:14陳磊
中國科技信息 2016年9期
陳 磊
民用飛機儀表自動著陸系統控制律設計
陳 磊
本文對基于儀表的自動著陸技術進行了研究,以波音747飛機為對象,分別對自動著陸系統縱向以及橫側向控制律進行了設計,運用MATLAB軟件得到了自動著陸系統仿真軟件,該仿真軟件的構建及分析結果為自動著陸系統技術的進一步研究提供了思路和參考,可應用于工程實際。
民機的進近著陸階段是事故多發階段,也是最復雜的飛行階段。由于這一階段飛行高度低,所以,對飛機安全的要求也最高,尤其在終端進近時,飛機的所有狀態都必須高精度保持,直到準確地在一個規定的點上接地。對民機著陸,目前世界上主要有儀表著陸系統、微波著陸系統、全球定位系統三種方式。
儀表著陸系統目前發展比較成熟,但存在著智能提供單一而又固定的下滑道、波束覆蓋區小、多徑干擾嚴重等缺點;微波著陸系統主要優點是導引精度高、比例覆蓋區大,能提供各種進場航線和全天候導引功能,但造價高,地面和記載設備要求高,換裝代價較大,發展受到限制;GPS是美國軍方研制的衛星導航系統,是繼慣性導航之后,導航技術的又一重大發展,具有全球、全天候定位能力、軍用信號定位精度高、應用范圍廣和相對造價低的優點,但也存在由于受到人為干擾時誤差較大的缺點。
本文對儀表自動著陸系統進行了控制律設計,由于在著陸階段,飛機的高度和速度變化范圍較小,因此采用小擾動方法將飛機的非線性運動方程進行線性化處理,從而利用簡化后的線性模型進行運動分析和控制律設計。另外由于飛機自身的對稱性,在進行線性化過程中可以將縱向和橫側向進行解耦,分別進行控制律的設計,最后通過綜合驗證,完成自動著陸系統的控制律設計。
儀表縱向自動著陸控制律設計
縱向自動著陸控制律包括內環電傳增穩控制和外環俯仰角控制、下滑著陸航跡控制,同時需要控制發動機調節速度,所以縱向儀表自動著陸控制為姿態和航跡的綜合控制。設計時需要先設計電傳增穩控制律,保證飛行穩定和駕駛員操縱的飛行品質,再設計俯仰角跟蹤回路以及縱向航跡跟蹤保持控制回路。縱向自動著陸系統結構框圖見圖1所示。
(1)內環縱向電傳增穩控制系統
由于飛機在高速飛行時,乘客主要感受法向過載的變化,而在低速飛行時,主要感受俯仰角速率的變化,因此在考慮縱向飛行品質時,采用C*準則,即綜合考慮飛機的法向過載和俯仰角速度進行內環電傳縱向增穩的設計。縱向電傳增穩控制采用C*顯模型跟蹤進行最優二次型設計,該設計兼顧了飛機的操作品質和乘客舒適性,滿足了飛行品質的要求。包含全狀態反饋的閉環控制增穩系統結構框圖見圖2所示。
(2)俯仰角跟蹤控制系統
俯仰角跟蹤控制系統用于對飛機俯仰角進行控制,能夠根據飛行狀態的需要將飛機保持在給定的俯仰角。作為飛機縱向航跡控制的內環,其性能是保證自動著陸各階段航跡精確跟蹤的基礎,應實現對俯仰角指令快速、平穩的跟蹤。俯仰角跟蹤控制系統以縱向電傳控制增穩系統作為內環進行設計,采用了比例積分控制,結構框圖見圖3所示。
(3)速度保持與控制系統
飛機在自動著陸過程中,需要精確控制著陸速度,應采用自動油門系統實現速度保持與控制。著陸航跡偏差通過升降舵來進行修正,而自動油門系統主要用來補償著陸航跡跟蹤過程中帶來的速度偏差,使速度保持在規定范圍內。速度保持與控制系統結構框圖見圖4所示,采用了比例積分控制。
(4)定高控制系統
飛機自動著陸初始階段即為定高階段,定高環節采用俯仰角控制環節作為內環,對給定高度指令進行跟蹤,當偏離指定高度時,飛機會自動調節飛行姿態,爬升或下降到指定飛行高度。飛機定高平飛至截獲下滑波束后轉入下滑控制階段。定高控制系統以俯仰角控制為內環,反饋高度信號進行控制,其結構框圖見圖5所示。

圖1 縱向自動著陸系統結構框圖
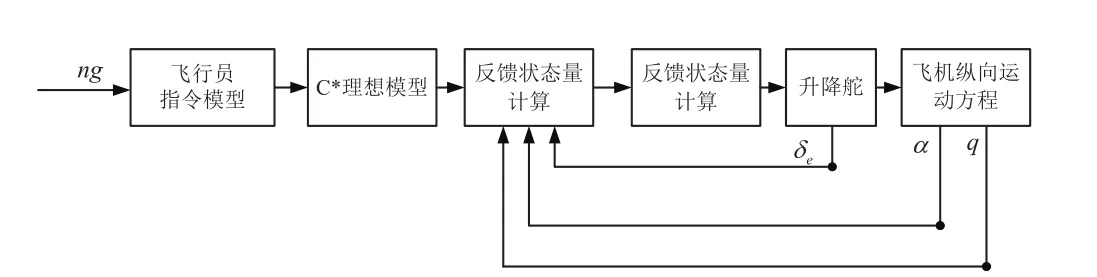
圖2 縱向電傳增穩系統結構框圖

圖3 俯仰角姿態控制系統結構框圖
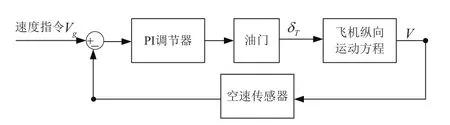
圖4 速度保持與控制系統結構框圖

圖5 定高控制系統結構框圖
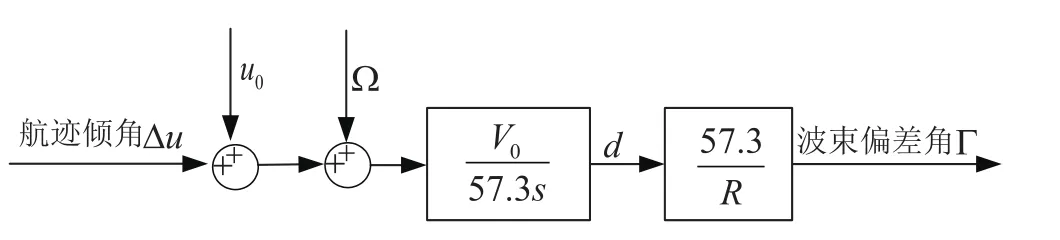
圖6 航跡傾角和波束偏差角間的運動學關系示意圖

圖7 下滑耦合控制器結構簡圖
(5)下滑波束導引系統
飛機著陸截獲下滑波束后,開始進入下滑線跟蹤階段。下滑波束導引系統通過建立航跡傾角Δu 與波束偏差角Γ的關系,構建對應反饋控制環節,使飛機在下滑階段能夠自動修正偏差,精確跟蹤下滑線。
本文設定下滑波束線的仰角為3度,航跡傾角Δu 和波束偏差角Γ間的運動學關系見圖6所示。
下滑波束導引系統以俯仰角控制系統為內回路,利用下滑耦合器調節飛機姿態,使波束偏差角最終為0。下滑波束導引系統下滑耦合器結構框圖見圖7所示。
(6)拉平控制系統
飛機在垂直平面內,從下滑過渡到實際著陸點的縱向運動軌跡稱為拉平軌跡。自動著陸需要設計拉平控制律,將下滑時的垂直速度減少到允許的著地速度,使飛機平穩、安全接地。本文選取的拉平初始高度為15m,采用指數曲線設計拉平軌跡,公式為:

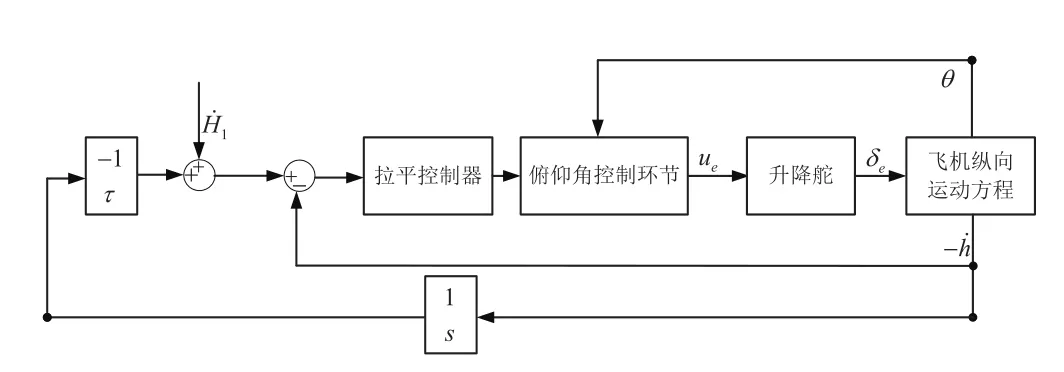
圖8 自動拉平控制系統結構框圖

圖9 縱向自動著陸控制系統仿真模型
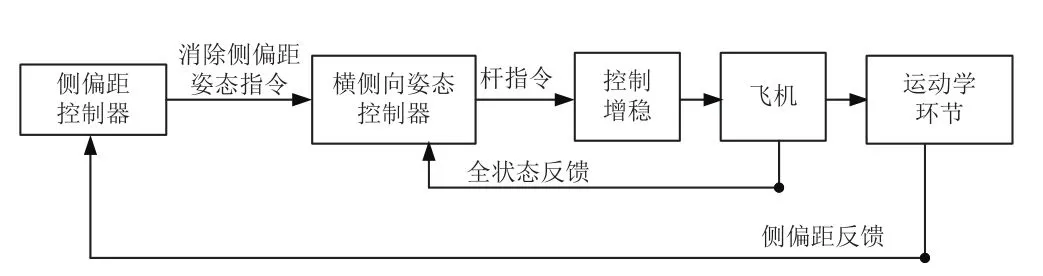
圖10 橫側向自動著陸系統結構框圖
拉平控制系統也采用俯仰角控制系統作為內環,通過改變姿態角來調整飛機的垂直下降速度,拉平控制系統結構框圖見圖8所示。
使用Matlab/Simulink軟件對縱向自動著陸控制系統進行仿真建模,模型見圖9所示。
儀表橫側向自動著陸系統控制律設計
橫側向自動著陸系統采用內環控制增穩、中環姿態控制和外環軌跡控制。在內環控制增穩回路的基礎上,中環姿態控制回路跟蹤飛機姿態控制指令;外環飛機側偏距控制回路消除在飛機著陸階段相對于跑道中心線的側偏距,橫側向自動著陸系統結構框圖見圖10所示。
(1)橫側向增穩控制
橫側向增穩控制主要是從增強穩定性和使滾轉角與側滑運動解耦的角度進行設計,包括增穩控制以及前饋控制,橫側向增穩控制結構框圖見圖11所示。
本文采用特征結構配置方法通過側滑角β、滾轉角速率p 、偏航角速率r和滾轉角φ反饋信號產生副翼和方向舵指令,以使飛機具有良好的飛行品質。前饋控制用來實現飛機對駕駛員指令信號的快速跟蹤以及滾轉與側滑運動的靜態解耦。
(2)橫側向姿態控制
橫側向姿態控制的基本要求是實現滾轉角和偏航角的快速、精確跟蹤,采用模型跟蹤最優二次型設計方法進行橫側向姿態控制,其結構框圖見圖12所示。

圖11 橫側向增穩控制結構框圖
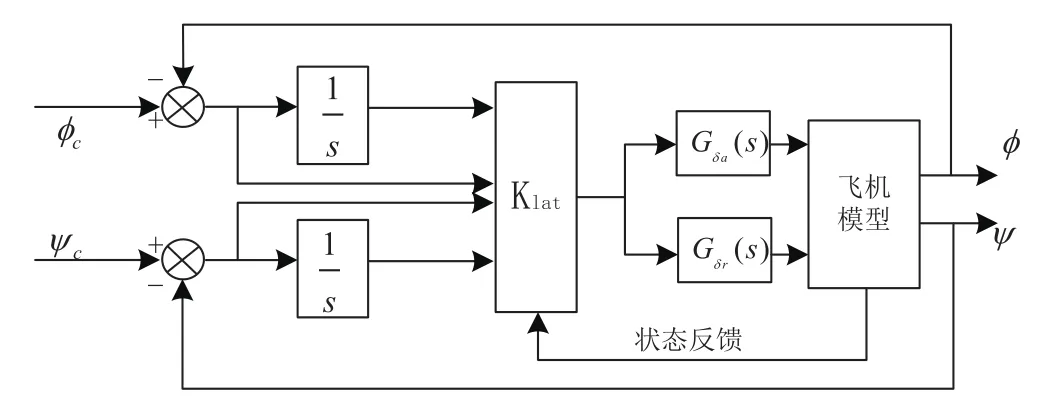
圖12 橫側向姿態控制系統結構框圖

圖13 飛機側向運動參數和波束偏差角的關系結構圖
(3)側向波束導引系統
側向波束導引系統是將飛機偏離航向信標臺發射的無線電波束中心線的信號通過耦合器變為滾轉控制指令,輸給自動駕駛儀的側向通道,操縱副翼偏轉來改變航跡方位角χ,修正飛機水平方向上的航跡。即側向波束耦合器與自動駕駛儀側向通道耦合,構成側向波束自動控制系統,自動修正飛機水平方向上的航跡,使飛機對準跑道中心線飛行。
首先建立飛機側向運動參數與波束偏差角λ之間的幾何關系,見圖13所示。
圖中:ψ為飛機縱軸偏離給定航向的偏航角;β為側滑角;y 為機偏離等信號線的側向偏離;R為機重心到航向信標臺的距離;λ為離波束等信號線的偏差角。
側向波束耦合器是將波束偏差角信號轉換為滾轉指令信號的裝置,其控制律為PID控制,公式為:

偏差角信號是使飛機穩定在高頻無線電波等強度線上的基本信號,積分信號用來消除靜差,角速率信號用來改善穩定性。綜上分析,側向波束導引系統結構框圖見圖14所示。
使用Matlab/Simulink軟件對側向自動著陸系統進行仿真建模,模型見圖15所示。
仿真與分析

圖14 側向波束導引系統結構框圖

圖15 側向自動著陸控制系統仿真模型

圖16 自動著陸系統仿真軟件
利用Matlab/simulink建模的自動著陸控制律模型軟件對B747飛機的自動著陸過程進行仿真,采用Matlab/GUI搭建的自動著陸系統仿真軟件界面見圖16所示。
在自動著陸系統仿真軟件界面中設置飛行初始條件、環境參數及控制參數,然后點擊開始仿真按鈕運行仿真模型,本次設置的參數見表1所示。

表1 飛行參數設置
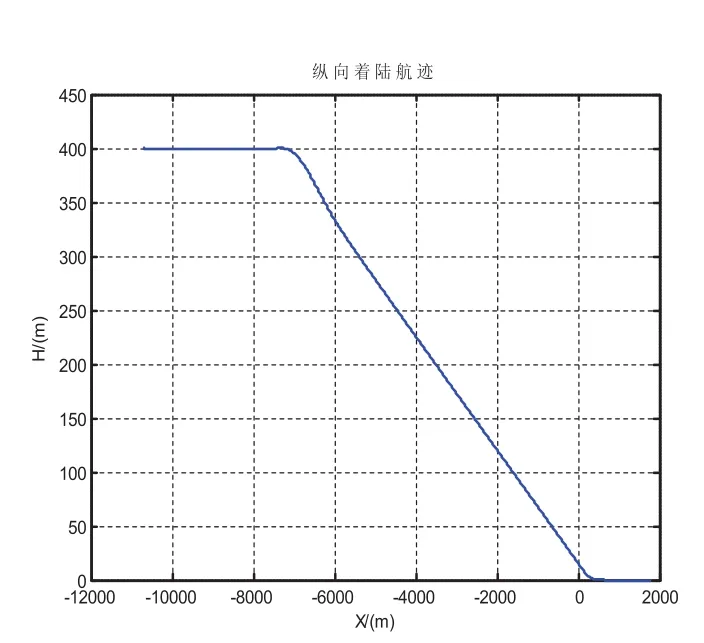
圖17 縱向著陸軌跡

圖18 橫側向著陸軌跡

圖19 三維著陸軌跡

圖20 飛機沿機體坐標系X軸方向分量

圖21 飛機沿機體坐標Y軸方向分量

圖22 飛機沿機體坐標系Z軸分量

圖23 滾轉角
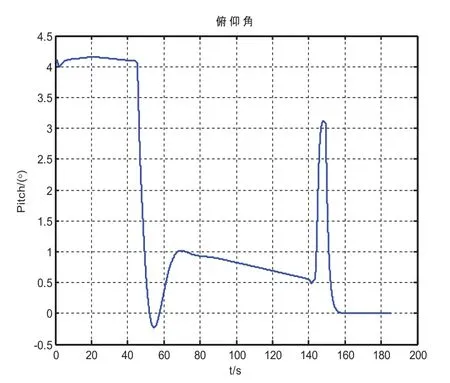
圖24 俯仰角

圖25 偏航角
自動著陸仿真曲線見圖17至圖25所示。
從上述飛機著陸曲線可以看出,所設計的自動著陸控制律可以實現飛機對理想著陸軌跡的精確跟蹤。整個著陸過程中滾轉角、俯仰角、偏航角變化值都不大,且振蕩次數很少,飛機姿態變化平穩,對于民機來說,具有較好的乘坐舒適性。飛機接地時,俯仰角為3度,主輪先接地,符合實際著陸情況。
另外在定高段和下滑段,采用自動油門系統進行速度保持,因此能夠將飛行速度控制在75m/s左右,圖中顯示速度控制誤差范圍不超過1m/s。在拉平段飛機適當減速,由75m/s平穩過渡到72m/s,確保飛機平穩、安全的著陸。
結語
本文對基于儀表的自動著陸技術進行了研究,以波音747為對象進行了自動著陸控制律的設計,通過仿真驗證了所提出的自動著陸系統控制律結構合理性與控制性能。仿真驗證結果表明,本文所設計的自動著陸系統控制律能夠保證較高精度的航跡跟蹤,能夠實現飛機安全、平穩的接地著陸,控制響應過程平緩,使飛機具有良好的乘坐品質和操作性能。


陳 磊
上海飛機設計研究院
陳磊,男,碩士研究生,上海飛機設計研究院飛機設計師,研究方向為工程模擬器和飛行仿真技術。
10.3969/j.issn.1001-8972.2016.09.008
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16