分離式尾舵潛艇卡單舵操縱控制技術研究
2016-08-18 01:41:08佘瑩瑩何晉秋武漢第二船舶設計研究所湖北武漢430064中國船舶重工集團公司第七四研究所上海00000
艦船科學技術 2016年5期
佘瑩瑩,何晉秋,支 平(. 武漢第二船舶設計研究所,湖北 武漢 430064;. 中國船舶重工集團公司第七〇四研究所,上海 00000)
分離式尾舵潛艇卡單舵操縱控制技術研究
佘瑩瑩1,何晉秋1,支平2
(1. 武漢第二船舶設計研究所,湖北 武漢 430064;2. 中國船舶重工集團公司第七〇四研究所,上海 200000)
提出針對分離式尾舵單舵卡舵狀態下的僅應用操縱面對潛艇進行挽回的 LQG/LTR 操縱控制技術,設計相應的分離式尾舵單舵卡舵狀態下潛艇的數值仿真模塊。數值仿真結果驗證該設計方法的有效性。
潛艇;LQG/LTR;卡舵;操縱控制
0 引 言
潛艇在水下發生尾水平舵卡下潛舵事故后,由于舵力的作用使艇產生首傾和下潛運動,如果沒有及時采取有效的挽回措施,就可能使艇產生危險縱傾,并且艇的深度超過極限下潛深度或撞到海底。因為舵力的大小與航速平方、舵角成正比,所以高速、尾水平舵大下潛舵角卡舵事故是極其危險的情況。
本文根據分離式尾舵潛艇的特點,提出針對分離式尾舵單舵卡舵狀態下的僅應用操縱面手段對潛艇進行挽回的 LQG/LTR 操縱控制技術,利用 Matlab 軟件建立了相應的數值仿真模型。數值仿真結果驗證了當一舷尾水平舵發生卡舵事故時,另一舷尾水平舵可以有效地對潛艇進行挽回。
1 數學模型分析
對潛艇的非線性模型在定深直航狀態下進行線性化,得到 14 kn 航速下的線性數學模型為:

在潛艇控制中,對輸出向量中的量進行尺度上的變換,以使它們之間可以進行有意義的相互比較。設變換矩陣為則有。隨后對控制輸入中的量進行尺度上的變換,設變換矩陣為,則有
那么尺度變換后的潛艇模型為:

2 基于潛艇數學模型的多變量反饋設計
2.1LQG/LTR 設計方法
對應于卡爾曼濾波器問題,需要下面的隨機動態來獲得卡爾曼濾波器增益:



對于最優狀態反饋調節器問題,有控制代數黎卡提方程(CARE):式中:R 為控制輸入加權矩陣;Q 為狀態變量加權矩陣。那么控制增益,其中 K 為 CARE 的至少半正定解。

那么LQG/LTR控制器的傳遞函數矩陣為:


式中:u 為控制輸入;e 為誤差向量。
2.2基于潛艇模型的 LQG/LTR 設計
針對模型(1)進行 LQG/LTR 控制器的設計,為確保系統的零穩態誤差,必須在被控對象和控制器間設置合適的積分器,這一點可以通過對被控對象的狀態增廣方法來實現。也就是說,將增廣了積分器的被控對象視為廣義的被控對象,然后針對廣義被控對象設計 LQR/LTR 控制器。在 LQR/LTR 控制器設計完成后,將積分器納入所設計的控制器即可,這樣得到的控制器才是最終設計的控制器。
對每個控制通道均增加一個積分器,則廣義被控對象的維數由 10 維增加到 14 維,并可由下面的動態來描述:

對狀態增廣后的對象進行 LQG/LTR 控制器的綜合,選擇合適的參數并經反復調試得到 LQG/LTR 控制器的參數。
3 閉環控制系統仿真分析
當航速 14 kn,且潛艇初始狀態為定深直航狀態時,在 t = 100 s 時潛艇的尾左水平舵突然卡舵且打在最大下潛舵角 30 °。之后潛艇的方向舵、尾右水平舵和首水平舵協調操作對潛艇卡舵事故進行挽回,保持潛艇的深度。圖1 給出了在分離式尾舵單舵卡舵狀態下的潛艇深度曲線。圖2 ~ 圖5 分別為方向舵、尾左右水平舵和首舵舵角曲線。

圖1 14 kn 航速潛艇的深度Fig. 1 The depth of submarine under 14 kn

圖2 14 kn 速潛艇的方向舵舵角Fig. 2 The rudder angle of submarine under 14 kn
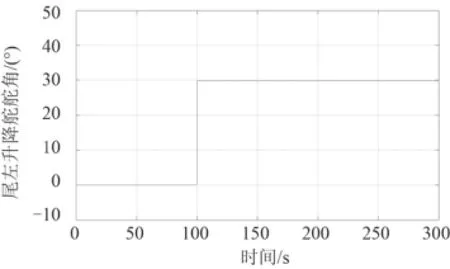
圖3 14 kn 速潛艇的艉左水平舵舵角Fig. 3 The left hydroplane angle of submarine under 14 kn

圖4 14 kn 速潛艇的艉右水平舵舵角Fig. 4 The right hydroplane angle of submarine under 14 kn

圖5 14 kn 速潛艇的艏水平舵舵角Fig. 5 The fore hydroplane angle of submarine under 14 kn
由圖1 可知,在分離式尾舵單舵卡舵狀態下的挽回過程中,潛艇能夠保持定深,并在經過瞬態之后穩定在 100 m 附近的很小范圍內,深度變化極小。
4 結 語
上述研究和仿真結果可知,對于分離舵來說,卡舵不再是一種十分危險的事故,并且艇在水下正常航行時,首、尾水平舵都是以保持深度方式操縱,所以一舷尾分離舵發生事故后,只需及時采取協調操舵及減速措施挽回,艇的深度和縱傾的變化都較小。
[1]施生達. 潛艇操縱性[M]. 北京: 國防工業出版社, 1995.
[2]孫元泉. 潛艇和深潛器的現代操縱理論與應用[M]. 北京: 國防工業出版社, 2001.
Research on motion control of submarine with jammed split stern plane
SHE Ying-ying1, HE Jin-qiu1, ZHI Ping2
(1. Second Ship Design and Research Institute, Wuhan 430064, China;
2. The 704 Research Institute of CSIC, Shanghai 200000, China)
The LQG/LTR motion control method for submarine with jammed split stern plane is proposed.The numerical simulation software in MATLAB environment is developed for the case of jammed split stern plane. The simulation results verify the efficiency and feasibility of the proposed method.
submarine;LQG/LTR;jammed stern plane;motion control
TP391.9
A
1672-7619(2016)05-0079-03
10.3404/j.issn.1672-7619.2016.05.017
2015-10-08;
2015-12-15
佘瑩瑩(1983-),女,高級工程師,主要從事船舶系統工程和操縱控制技術方面的研究工作。