基于無(wú)模型預(yù)測(cè)控制的無(wú)刷直流電機(jī)換相轉(zhuǎn)矩波動(dòng)抑制策略
2016-08-30 09:22:44史婷娜姜國(guó)凱夏長(zhǎng)亮
電工技術(shù)學(xué)報(bào) 2016年15期
關(guān)鍵詞:模型
史婷娜 李 聰 姜國(guó)凱 夏長(zhǎng)亮,2
(1.天津大學(xué)電氣與自動(dòng)化工程學(xué)院 天津 300072 2.天津工業(yè)大學(xué) 天津市電工電能新技術(shù)重點(diǎn)實(shí)驗(yàn)室 天津 300387)
?
基于無(wú)模型預(yù)測(cè)控制的無(wú)刷直流電機(jī)換相轉(zhuǎn)矩波動(dòng)抑制策略
史婷娜1李聰1姜國(guó)凱1夏長(zhǎng)亮1,2
(1.天津大學(xué)電氣與自動(dòng)化工程學(xué)院天津300072 2.天津工業(yè)大學(xué) 天津市電工電能新技術(shù)重點(diǎn)實(shí)驗(yàn)室天津300387)
無(wú)刷直流電機(jī)工作時(shí)產(chǎn)生的換相轉(zhuǎn)矩波動(dòng)嚴(yán)重影響著其在高精度伺服系統(tǒng)中的應(yīng)用。本文將無(wú)模型控制中的泛模型思想與預(yù)測(cè)控制相結(jié)合,提出一種無(wú)模型預(yù)測(cè)控制方法來(lái)抑制無(wú)刷直流電機(jī)換相時(shí)的轉(zhuǎn)矩波動(dòng)。通過(guò)推導(dǎo)無(wú)刷直流電機(jī)控制系統(tǒng)的泛模型的表達(dá)式,將泛模型作為預(yù)測(cè)模型,通過(guò)價(jià)值函數(shù)選擇最優(yōu)的開(kāi)關(guān)狀態(tài),保持非換相相電流值恒定。實(shí)驗(yàn)結(jié)果證明,該方法能有效抑制電機(jī)在額定轉(zhuǎn)速以下的高、低速情況下的換相轉(zhuǎn)矩波動(dòng),控制過(guò)程中不需要精確的電機(jī)參數(shù),算法簡(jiǎn)單,易于實(shí)現(xiàn)。
無(wú)刷直流電機(jī)轉(zhuǎn)矩波動(dòng)無(wú)模型預(yù)測(cè)控制價(jià)值函數(shù)
0 引言
無(wú)刷直流電機(jī)因其高效率、長(zhǎng)壽命、低噪聲和高可靠性等優(yōu)點(diǎn),在家用電器、汽車(chē)、航空等行業(yè)領(lǐng)域內(nèi)得到了較好的發(fā)展[1-3]。無(wú)刷直流電機(jī)在運(yùn)行過(guò)程中存在較大的轉(zhuǎn)矩波動(dòng),包括換相引起的轉(zhuǎn)矩波動(dòng)、齒槽轉(zhuǎn)矩波動(dòng)、諧波轉(zhuǎn)矩波動(dòng)等,然而換相轉(zhuǎn)矩波動(dòng)幅值最大可達(dá)到平均轉(zhuǎn)矩的50%左右,嚴(yán)重影響了電機(jī)的控制性能[3]。因此對(duì)無(wú)刷直流電機(jī)的換相轉(zhuǎn)矩波動(dòng)進(jìn)行抑制一直是無(wú)刷直流電機(jī)領(lǐng)域的研究熱點(diǎn)[4-14]。
學(xué)者Pillay P和Krishnan R于1989年在文獻(xiàn)[6]中首次提到無(wú)刷直流電機(jī)的換相轉(zhuǎn)矩波動(dòng)問(wèn)題。該文獻(xiàn)闡述了由于繞組電感的作用使得換相時(shí)電流不能突變,導(dǎo)致?lián)Q相轉(zhuǎn)矩波動(dòng)。針對(duì)換相轉(zhuǎn)矩波動(dòng)問(wèn)題,國(guó)內(nèi)外眾多學(xué)者進(jìn)行了深入研究。一類(lèi)解決途徑是通過(guò)改變逆變器直流側(cè)輸入電壓的大小,使其與電機(jī)相反電動(dòng)勢(shì)幅值保持一定的比例關(guān)系,來(lái)達(dá)到抑制換相轉(zhuǎn)矩波動(dòng)的目的[7]。另一類(lèi)解決途徑是維持逆變器直流側(cè)輸入電壓不變,通過(guò)控制電機(jī)換相過(guò)程中關(guān)斷相電流下降速率和開(kāi)通相電流上升速率相等,間接保持非換相電流恒定,從而達(dá)到抑制換相轉(zhuǎn)矩波動(dòng)的目的[8-12]。隨著現(xiàn)代控制理論的發(fā)展,直接轉(zhuǎn)矩控制以及許多其他的智能控制方法也被應(yīng)用到無(wú)刷直流電機(jī)控制系統(tǒng)中來(lái)抑制換相轉(zhuǎn)矩波動(dòng)[12,13]。
其中通過(guò)控制換相過(guò)程中電流變化率來(lái)抑制換相轉(zhuǎn)矩波動(dòng)的主要方法有重疊換相法、脈寬調(diào)制(Pulse Width Modulation,PWM)法、滯環(huán)電流控制法和電流預(yù)測(cè)控制法等[5]。文獻(xiàn)[8]指出電流換相時(shí)間及換相期間的電流波動(dòng)與參考電流的幅值有關(guān),并提出電流滯環(huán)控制方法控制開(kāi)通相電流的上升速率來(lái)抑制低速情況下的換相轉(zhuǎn)矩波動(dòng),該方法簡(jiǎn)單且快速性好,但在高速下的轉(zhuǎn)矩波動(dòng)抑制效果不是很好。文獻(xiàn)[9]提出了一種基于單電流傳感器的最小差拍電流控制策略,該方法在換相過(guò)程中通過(guò)恰當(dāng)?shù)恼伎毡瓤刂疲WC了開(kāi)通相電流上升速率和關(guān)斷相電流下降速率相等,取得了較好的抑制換相轉(zhuǎn)矩波動(dòng)的效果。文獻(xiàn)[10]采用電流預(yù)測(cè)策略計(jì)算換相過(guò)程中的占空比,對(duì)開(kāi)通相和關(guān)斷相電流進(jìn)行控制,較好地實(shí)現(xiàn)了換相轉(zhuǎn)矩波動(dòng)抑制,但是高、低速兩種情況下需采用不同的控制策略。文獻(xiàn)[11]基于預(yù)測(cè)控制理論,將定子電流的預(yù)測(cè)控制分為預(yù)測(cè)模型的建立、反饋校正和滾動(dòng)優(yōu)化三個(gè)步驟,以非換相相電流為控制目標(biāo),較好地抑制了換相轉(zhuǎn)矩波動(dòng)。文獻(xiàn)[12]通過(guò)對(duì)PWM周期進(jìn)行劃分,在不同的時(shí)間段實(shí)施不同的調(diào)制策略來(lái)控制三相繞組的電流變化率,分別在高、低速下選擇不同的占空比計(jì)算方案,達(dá)到抑制換相轉(zhuǎn)矩波動(dòng)的目的。
本文提出一種無(wú)刷直流電機(jī)無(wú)模型預(yù)測(cè)控制方法來(lái)抑制換相轉(zhuǎn)矩波動(dòng)。該方法將無(wú)模型控制中的泛模型思想與預(yù)測(cè)控制相結(jié)合,將推導(dǎo)出的無(wú)刷直流電機(jī)控制系統(tǒng)的泛模型作為預(yù)測(cè)模型,通過(guò)價(jià)值函數(shù)選擇最優(yōu)的開(kāi)關(guān)狀態(tài),保持非換相相電流值恒定。實(shí)驗(yàn)證明,該方法能有效抑制額定轉(zhuǎn)速以下的高、低速情況下的換相轉(zhuǎn)矩波動(dòng),控制過(guò)程中不需要精確的電機(jī)參數(shù),適用于電機(jī)全速度范圍,算法簡(jiǎn)單,易于實(shí)現(xiàn)。
1 無(wú)刷直流電機(jī)換相轉(zhuǎn)矩波動(dòng)分析
1.1無(wú)刷直流電機(jī)數(shù)學(xué)模型
無(wú)刷直流電機(jī)控制系統(tǒng)一般采用三相電壓型逆變器,電機(jī)采用三相六步各相輪流導(dǎo)通120°的控制方式,其等效電路如圖1所示。
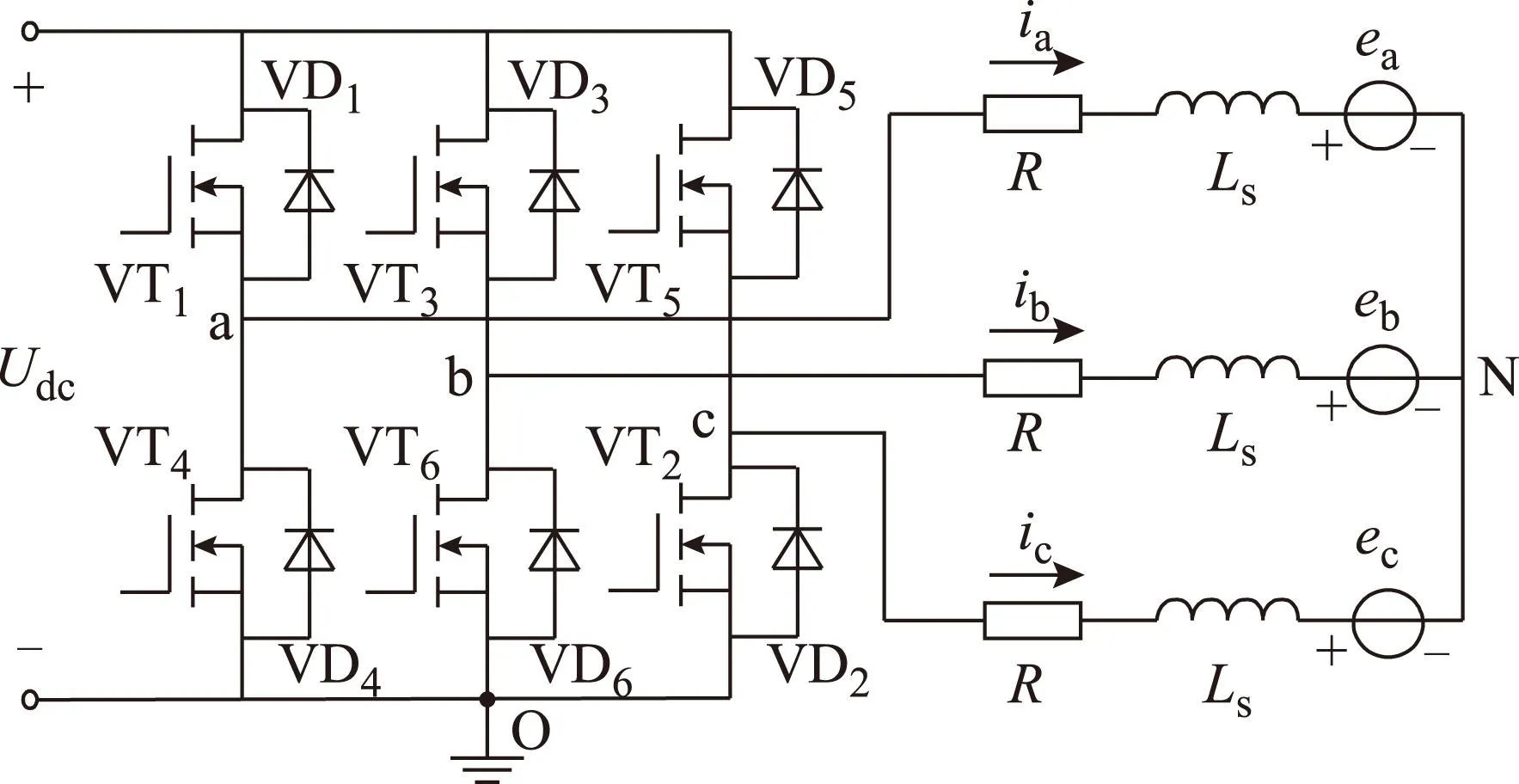
圖1 無(wú)刷直流電機(jī)三相橋逆變電路Fig.1 Brushless DC motor three-phase bridge inverter circuit
在實(shí)際應(yīng)用中,通常無(wú)刷直流電機(jī)不提供中性點(diǎn),電機(jī)的端電壓難以直接檢測(cè),故常采用式(1)所示數(shù)學(xué)模型。
(1)
式中,uaO、ubO、ucO分別為電機(jī)定子三相繞組端對(duì)功率地電壓;uNO為電機(jī)中性點(diǎn)對(duì)功率地電壓;ia、ib、ic分別為三相電流;ea、eb、ec分別為三相反電動(dòng)勢(shì);R為定子繞組的等效電阻;Ls為定子繞組的等效電感。
無(wú)刷直流電機(jī)的電磁轉(zhuǎn)矩為
(2)
式中,ω為轉(zhuǎn)子機(jī)械角速度。
1.2無(wú)刷直流電機(jī)換相轉(zhuǎn)矩波動(dòng)
由于無(wú)刷直流電機(jī)繞組電感的存在,在換相過(guò)程中關(guān)斷相和開(kāi)通相電流變化率不相等,使得非換相繞組電流在換相期間發(fā)生變化,進(jìn)而影響電磁轉(zhuǎn)矩。
電機(jī)在不同的速度區(qū)間,換相過(guò)程的電流變化情況如圖2所示。
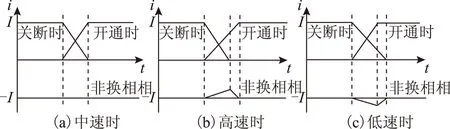
圖2 三種換相過(guò)程電流變化情況Fig.2 The three conditions of current commutation process change
在圖2a中,關(guān)斷相和開(kāi)通相的電流變換率相等,非換相相電流保持恒定,此時(shí)電磁轉(zhuǎn)矩為一恒定值,不會(huì)發(fā)生換相轉(zhuǎn)矩波動(dòng)現(xiàn)象;圖2b中,換相時(shí)關(guān)斷相電流下降到零時(shí),開(kāi)通相電流還未達(dá)到穩(wěn)態(tài)值,在這種情況下,非換相相電流值減小,將會(huì)引起電機(jī)的電磁轉(zhuǎn)矩減小;圖2c中,換相時(shí)關(guān)斷相電流還未下降到零時(shí),開(kāi)通相電流已達(dá)到穩(wěn)態(tài)值,在這種情況下,非換相相電流值增大,將會(huì)引起電機(jī)的電磁轉(zhuǎn)矩增大。
令x,y,z表示電機(jī)三相繞組,x,y,z∈(a,b,c)。在換相期間,以z相為非換相相,x相為關(guān)斷相,y相為開(kāi)通相為例。假設(shè)各相繞組反電動(dòng)勢(shì)幅值在換相期間均保持恒值E不變,由ix+iy+iz=0和式(2)可知,換相期間電磁轉(zhuǎn)矩為
(3)
由以上分析可知,在假設(shè)反電動(dòng)勢(shì)不變的基礎(chǔ)上,換相轉(zhuǎn)矩與非換相相電流值成正比,因此采用非換相相電流作為換相轉(zhuǎn)矩的衡量標(biāo)準(zhǔn),若非換相相電流在換相期間保持恒定,則可以有效抑制電機(jī)的換相轉(zhuǎn)矩波動(dòng)。
2 無(wú)刷直流電機(jī)換相轉(zhuǎn)矩波動(dòng)抑制策略
2.1無(wú)刷直流電機(jī)無(wú)模型預(yù)測(cè)控制策略
無(wú)模型控制策略是一種實(shí)現(xiàn)建模控制一體化的控制方法,無(wú)模型控制器采用的是“泛模型”和一些“控制功能”相結(jié)合的設(shè)計(jì)方法。系統(tǒng)的泛模型的表達(dá)式為[14]
y(k+1)-y(k)=φ(k)[v(k)-v(k-1)]
(4)
式中,y(k)表示系統(tǒng)的輸出;v(k)表示系統(tǒng)的輸入;φ(k)表示泛模型的特征參量。
無(wú)模型預(yù)測(cè)控制算法借鑒無(wú)模型控制器的泛模型思想,將泛模型作為預(yù)測(cè)模型,是一種無(wú)模型控制和預(yù)測(cè)控制相融合的算法。對(duì)于無(wú)刷直流電機(jī)控制系統(tǒng)而言,在換相期間對(duì)非換相相電流進(jìn)行控制,將非換相相電流值作為控制器的輸入,待預(yù)測(cè)的未來(lái)時(shí)刻的電流值作為控制器的輸出,下面針對(duì)無(wú)刷直流電機(jī)特有的運(yùn)行方式,推導(dǎo)其泛模型及特征向量表達(dá)式。
在換相期間,以z相為非換相相,x相為關(guān)斷相,y相為開(kāi)通相為例。將無(wú)刷直流電機(jī)數(shù)學(xué)模型式(1)進(jìn)行整理,得到
(5)
將式(5)離散化可得到kTs時(shí)刻z相電流表達(dá)式為
(6)
式中,Ts為采樣時(shí)間。
e(k)=ex(k)+ey(k)-2ez(k)
(7)
u(k)=uxO(k)+uyO(k)-2uzO(k)
(8)
同理可得(k+1)Ts時(shí)刻的z相電流為
(9)
由式(6)和式(9)可得
(10)
[iz(k+1)-iz(k)]-[iz(k)-iz(k-1)]
(11)
同理可進(jìn)一步推得
(12)
由式(12)可以看出,在換相期間,非換相z相電流值與電機(jī)的反電動(dòng)勢(shì)值以及端電壓值有關(guān)。將式(12)整理可得
[iz(k+1)-iz(k)]-[iz(k)-iz(k-1)]=φ(k)·
{[iz(k)-iz(k-1)]-[iz(k-1)-iz(k-2)]}
(13)
進(jìn)而可得非換相相z相電流在(k+1)Ts時(shí)刻的預(yù)測(cè)值為iz(k+1)=φ(k)[iz(k)-2iz(k-1)+iz(k-2)]+
[2iz(k)-iz(k-1)]
(14)
將式(13)作為無(wú)刷直流電機(jī)控制系統(tǒng)的泛模型,其中,泛模型的特征參量可以為

(15)
由以上分析可知,無(wú)刷直流電機(jī)在換相期間,非換相相在(k+1)Ts時(shí)刻的預(yù)測(cè)電流值受電機(jī)三相繞組的端電壓和反電動(dòng)勢(shì)影響。而三相反電動(dòng)勢(shì)的值受轉(zhuǎn)速影響,三相繞組的端電壓則由三相逆變橋的開(kāi)關(guān)導(dǎo)通狀態(tài)決定。因此,只要在kTs時(shí)刻合理選擇功率開(kāi)關(guān)管的導(dǎo)通狀態(tài),就可以得到(k+1)Ts時(shí)刻的最優(yōu)電流值,即使非換相相電流變化最小,進(jìn)而保持電磁轉(zhuǎn)矩變化最小。
將上文中推導(dǎo)的無(wú)刷直流電機(jī)的泛模型作為預(yù)測(cè)模型,代替?zhèn)鹘y(tǒng)預(yù)測(cè)控制中的含電機(jī)電阻、電感參數(shù)的精確系統(tǒng)數(shù)學(xué)模型,通過(guò)定義的價(jià)值函數(shù)來(lái)選擇最恰當(dāng)?shù)拈_(kāi)關(guān)導(dǎo)通狀態(tài),得到未來(lái)時(shí)刻的最優(yōu)電流值。無(wú)刷直流電機(jī)在運(yùn)行過(guò)程中由速度環(huán)得到電流參考值。換相期間,在kTs時(shí)刻預(yù)測(cè)(k+1)Ts時(shí)刻的非換相相電流值,由于采樣間隔非常短,可以認(rèn)為iref(k+1)≈iref(k), 所以定義價(jià)值函數(shù)為
(16)

2.2換相模式
無(wú)刷直流電機(jī)在運(yùn)行過(guò)程中采用兩兩導(dǎo)通的控制方式,每隔60°電角度改變一次導(dǎo)通狀態(tài),每個(gè)開(kāi)關(guān)管導(dǎo)通120°電角度。每改變一次狀態(tài),關(guān)斷相開(kāi)關(guān)管關(guān)斷,開(kāi)通相開(kāi)關(guān)管開(kāi)通,非換相相開(kāi)關(guān)管狀態(tài)保持不變。在一個(gè)運(yùn)行周期中存在六種換相模式,見(jiàn)表1所示。例如在換相模式Ⅰ時(shí),功率開(kāi)關(guān)管VT1關(guān)斷,對(duì)應(yīng)A相上橋臂關(guān)斷;功率開(kāi)關(guān)管VT3開(kāi)通,對(duì)應(yīng)B相上橋臂開(kāi)通;功率開(kāi)關(guān)管VT2保持不變,對(duì)應(yīng)C相下橋臂保持不變。
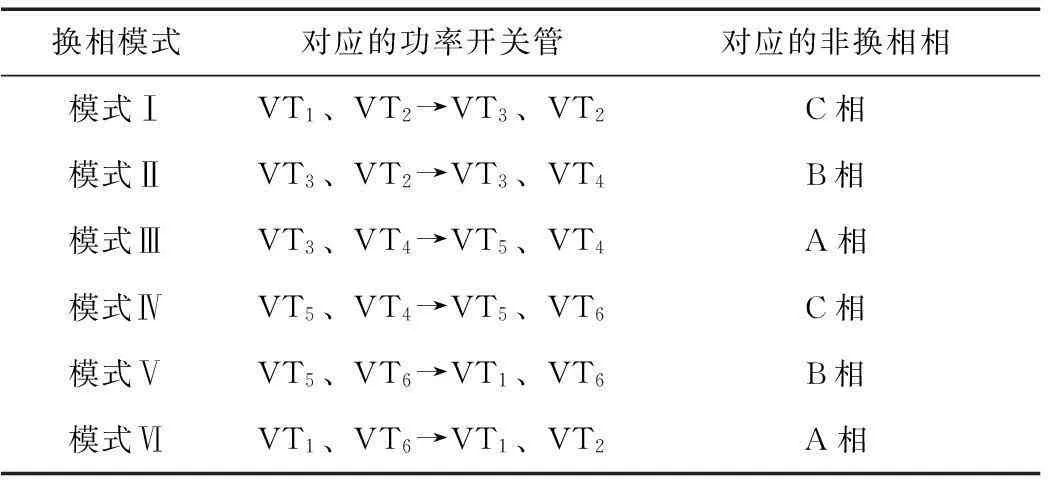
表1 換相模式Tab.1 Commutation mode
定義逆變電路中功率開(kāi)關(guān)管的狀態(tài)為Si(VT1VT2VT3VT4VT5VT6),功率開(kāi)關(guān)管開(kāi)通用“1”表示,關(guān)斷用“0”表示。在換相過(guò)程中,保持開(kāi)通相恒通,對(duì)關(guān)斷相和非換相相的功率開(kāi)關(guān)管進(jìn)行PWM控制來(lái)保持非換相相繞組電流維持不變,因此在任一模式下都有四種電路導(dǎo)通狀態(tài)。以模式Ⅰ為例,分別為:S1(001000)、S2(011000)、S3(101000)、S4(111000)。不同的開(kāi)關(guān)狀態(tài)下對(duì)應(yīng)的每相繞組的端電壓不同。例如,在S1(001000)時(shí),電路的導(dǎo)通情況如圖3所示。此時(shí)對(duì)應(yīng)的端電壓為u1=[uaOubOucO]T=[0UdcUdc]T。
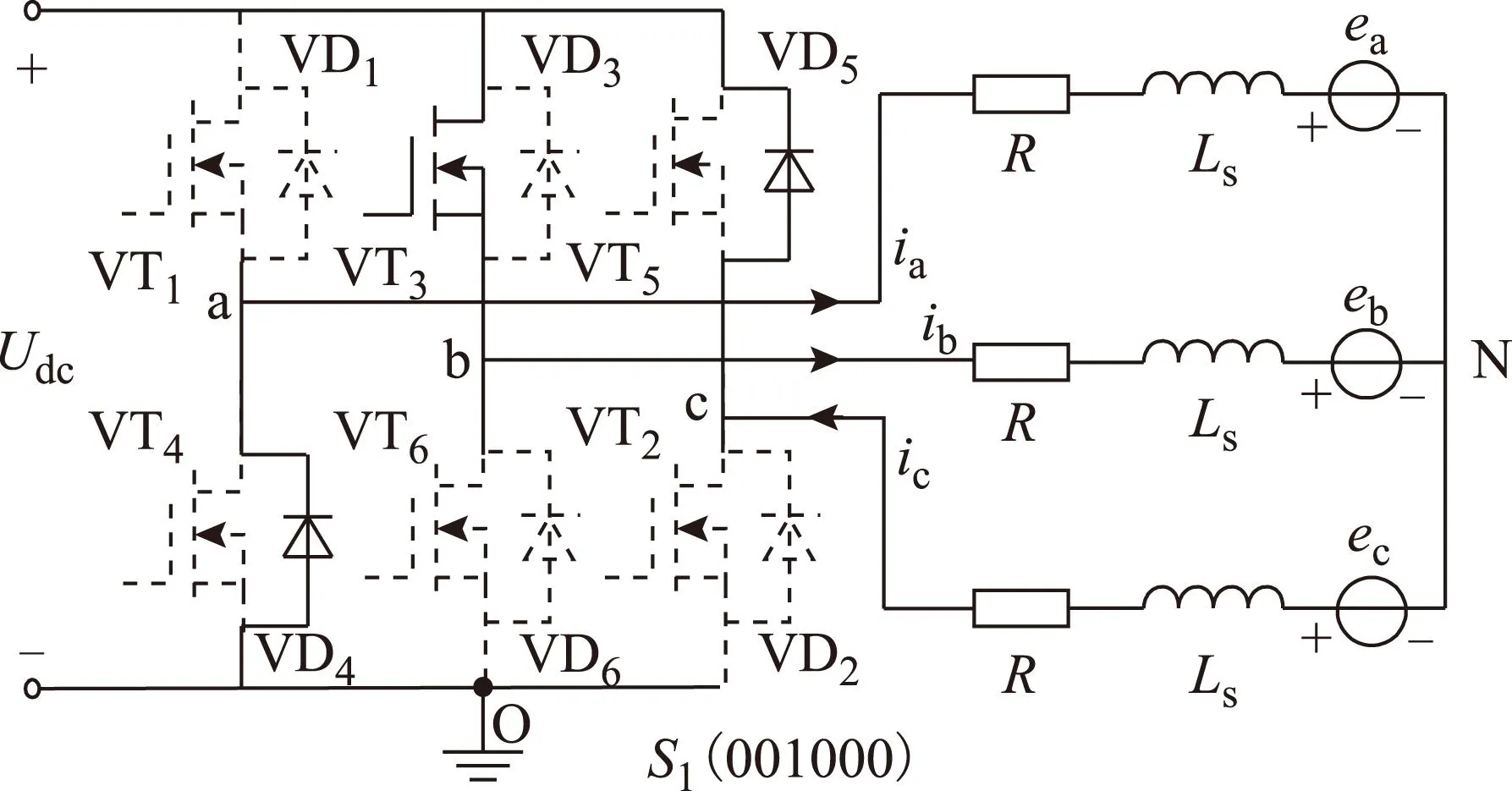
圖3 無(wú)刷直流電機(jī)換相過(guò)程示意圖Fig.3 The schematic diagram of Brushless DC motor commutation process
在不同的換相模式下,選擇不同的開(kāi)關(guān)狀態(tài)時(shí)對(duì)應(yīng)不同的端電壓值,由式(14)可以計(jì)算得到下一采樣時(shí)刻的非換相相電流預(yù)測(cè)值,根據(jù)價(jià)值函數(shù)式(16)可以選取最優(yōu)的開(kāi)關(guān)狀態(tài)。
2.3無(wú)刷直流電機(jī)無(wú)模型預(yù)測(cè)控制系統(tǒng)
圖4為基于無(wú)模型預(yù)測(cè)控制的無(wú)刷直流電機(jī)系統(tǒng)框圖。控制系統(tǒng)采用速度、電流雙閉環(huán)PI控制,在電流環(huán)中加入本文提出的無(wú)模型預(yù)測(cè)控制算法。以霍爾信號(hào)跳變時(shí)刻作為換相開(kāi)始時(shí)刻,以關(guān)斷相電流下降到零時(shí)刻作為換相結(jié)束時(shí)刻。無(wú)刷直流電機(jī)的反電動(dòng)勢(shì)隨轉(zhuǎn)子位置角呈梯形分布,其平頂部分的幅值為E=Ken,n表示轉(zhuǎn)速,Ke表示反電動(dòng)勢(shì)系數(shù)。在換相過(guò)程中,可以由電機(jī)轉(zhuǎn)速和反電動(dòng)勢(shì)波形函數(shù)計(jì)算得到各個(gè)時(shí)刻的三相反電動(dòng)勢(shì)值,由電流傳感器采樣得到各個(gè)時(shí)刻的三相電流值,由三相逆變橋的功率開(kāi)關(guān)管的導(dǎo)通狀態(tài)得到三相端電壓值,由系統(tǒng)的速度環(huán)得到非換相相電流參考值。
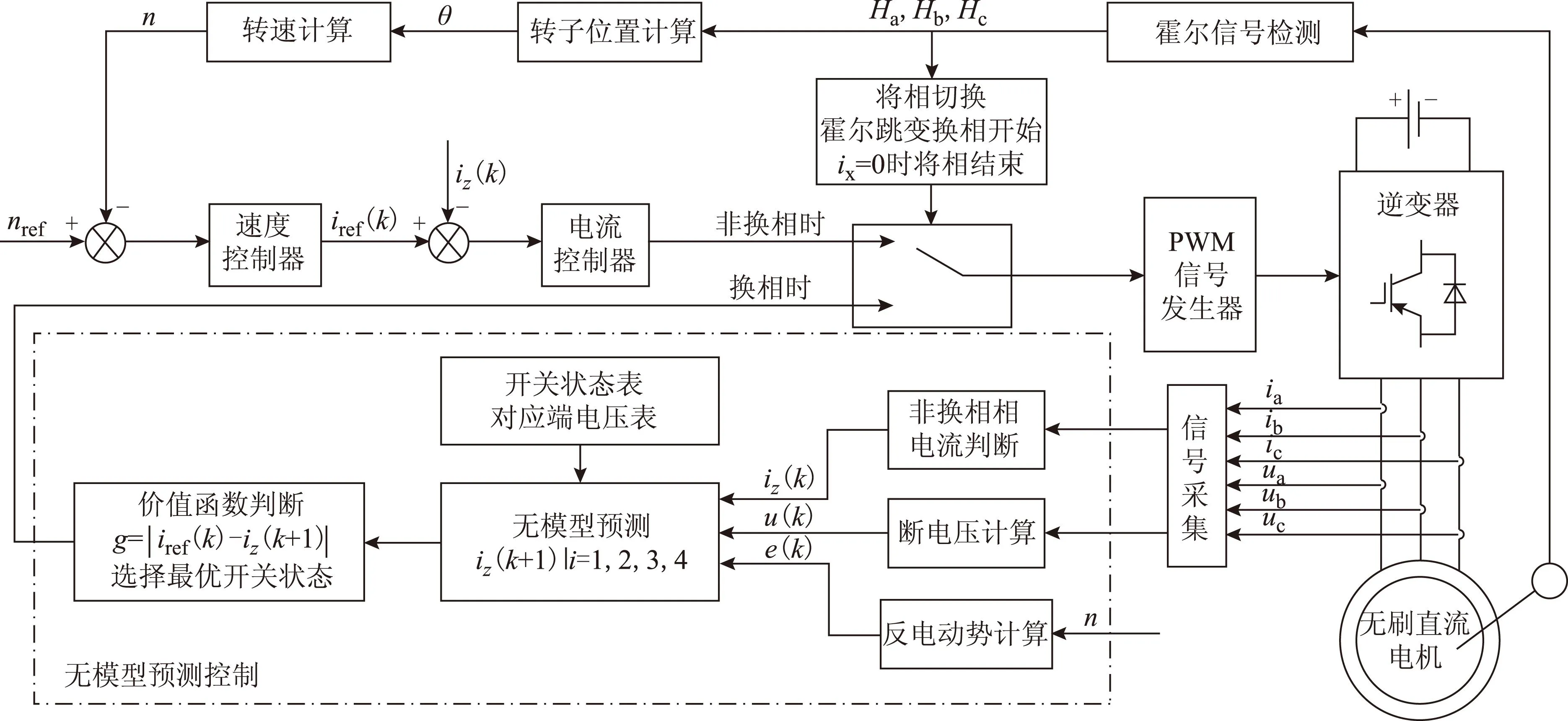
圖4 基于無(wú)模型預(yù)測(cè)控制的無(wú)刷直流電機(jī)系統(tǒng)框圖Fig.4 Block diagram of the BLDCM drive system with model free predictive control
3 實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)平臺(tái)如圖5所示,采用TI公司的DSP芯片TMS320F28335作為主控芯片,系統(tǒng)頻率為150 MHz,中斷頻率和采樣頻率為25 kHz,無(wú)刷直流電機(jī)參數(shù)見(jiàn)表2。電機(jī)的負(fù)載由一臺(tái)磁滯測(cè)功機(jī)提供,并能實(shí)時(shí)顯示轉(zhuǎn)速和轉(zhuǎn)矩。電機(jī)的三相電流由電流傳感器采樣后輸出,電磁轉(zhuǎn)矩根據(jù)式(2)計(jì)算后由DAC轉(zhuǎn)換電路輸出。
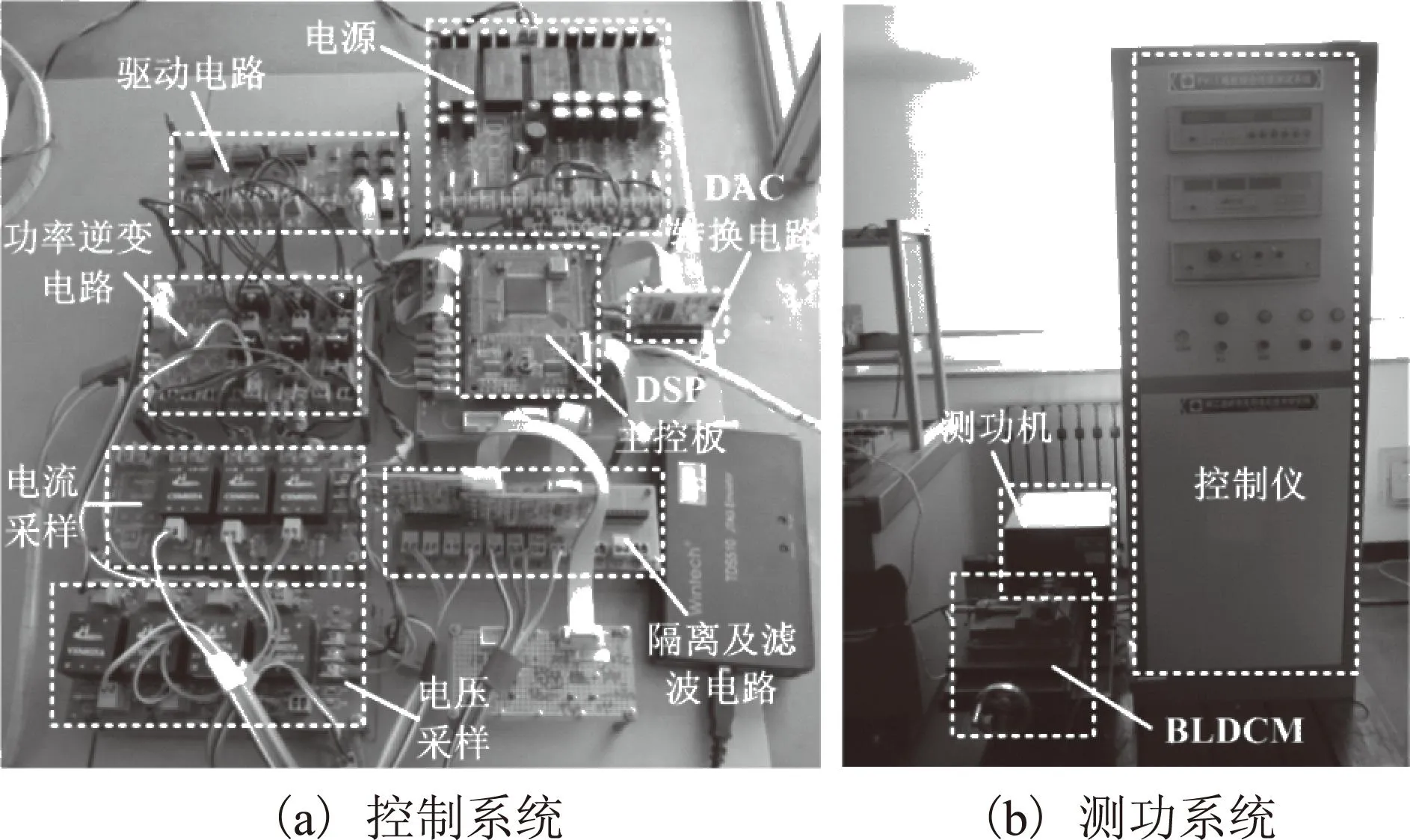
圖5 實(shí)驗(yàn)平臺(tái)Fig.5 Experimental platform
針對(duì)本文提出的無(wú)模型預(yù)測(cè)控制方法分別在額定轉(zhuǎn)速以下的低速和高速條件下做了無(wú)刷直流電機(jī)換相轉(zhuǎn)矩波動(dòng)抑制的實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果及分析如下。
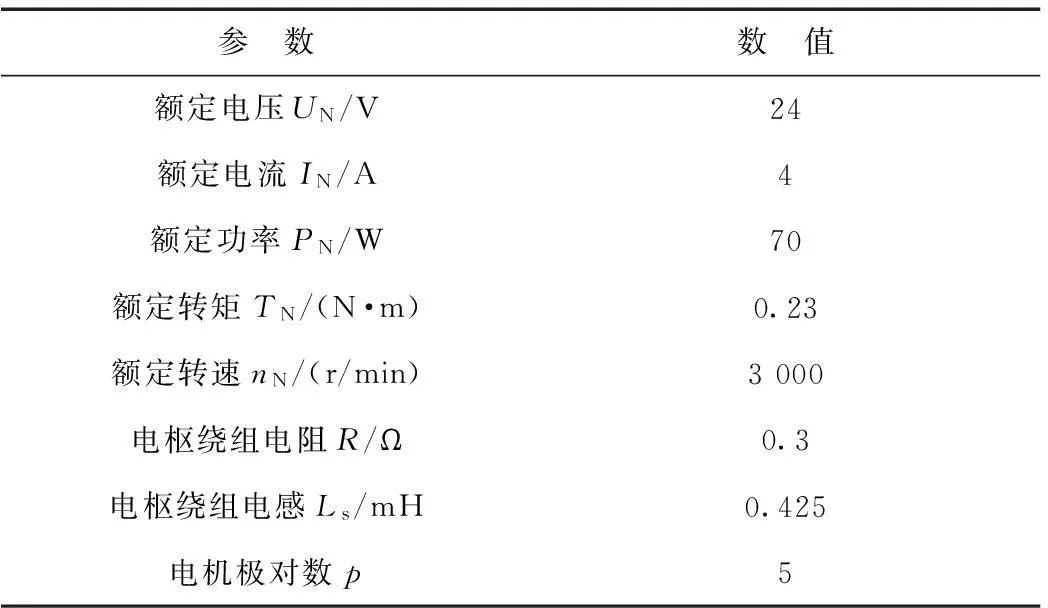
表2 無(wú)刷直流電機(jī)參數(shù)Tab.2 Parameters of BLDCM
圖6為無(wú)刷直流電機(jī)在TL=0.23 N·m、額定轉(zhuǎn)速以下的低速條件下未加入無(wú)模型預(yù)測(cè)控制,速度、電流雙閉環(huán)PI控制時(shí)的三相電流、電磁轉(zhuǎn)矩、三相端電壓以及三相反電動(dòng)勢(shì)實(shí)驗(yàn)波形。圖7是加入無(wú)模型預(yù)測(cè)控制時(shí)的實(shí)驗(yàn)波形。由圖6可以看出,未加入無(wú)模型預(yù)測(cè)控制時(shí),在換相期間,由于關(guān)斷相電流下降速率小于開(kāi)通相電流上升速率,導(dǎo)致非換相相電流波動(dòng)較大,因此引起較大的換相轉(zhuǎn)矩波動(dòng)。由于實(shí)驗(yàn)中采用的脈寬調(diào)制方式是上橋臂調(diào)制下橋臂恒通,因此上橋臂換相時(shí)的電磁轉(zhuǎn)矩波動(dòng)要小于下橋臂換相時(shí)的電磁轉(zhuǎn)矩波動(dòng),如圖6a中的H和L所示。圖中給出了三相反電動(dòng)勢(shì)的實(shí)驗(yàn)波形,由于加工制造等原因,實(shí)際的反電動(dòng)勢(shì)波形不是理想的梯形波,如圖中所示。在加入本文提出的無(wú)模型預(yù)測(cè)控制方法后,由圖7可以看出電流變化平穩(wěn),電磁轉(zhuǎn)矩波動(dòng)明顯減小。圖6b和圖7b分別是電流和電壓實(shí)驗(yàn)波形的局部放大圖。可以看出,加入無(wú)模型預(yù)測(cè)控制后,在額定轉(zhuǎn)速以下的低速時(shí)對(duì)非換相相的功率開(kāi)關(guān)管進(jìn)行控制,在關(guān)斷相電流下降到0時(shí),開(kāi)通相電流達(dá)到穩(wěn)態(tài)值,因而非換相相電流可以保持恒定,達(dá)到抑制換相轉(zhuǎn)矩波動(dòng)的目的。
在換相的初始時(shí)刻,由于DSP對(duì)電機(jī)運(yùn)行過(guò)程中歷史時(shí)刻的電流、電壓和反電動(dòng)勢(shì)值都進(jìn)行了存儲(chǔ),雖然前兩個(gè)時(shí)刻是兩相導(dǎo)通情況,但由于本文提出的無(wú)模型預(yù)測(cè)控制方法具有一般性,能同時(shí)適用于非換相期間和換相期間,因此在換相的初始時(shí)刻,可以調(diào)用前兩個(gè)時(shí)刻的電流值、反電動(dòng)勢(shì)值和端電壓值。以圖7b為例,對(duì)應(yīng)換相模式Ⅰ,CP表示換相間隔。換相前A相下橋臂恒通,B相懸空,C相上橋臂調(diào)制,故由開(kāi)關(guān)狀態(tài)(010010),可得換相前一時(shí)刻的三相端電壓值。非換相相(C相)電流值由電流傳感器測(cè)得,三相反電動(dòng)勢(shì)值離線得到。
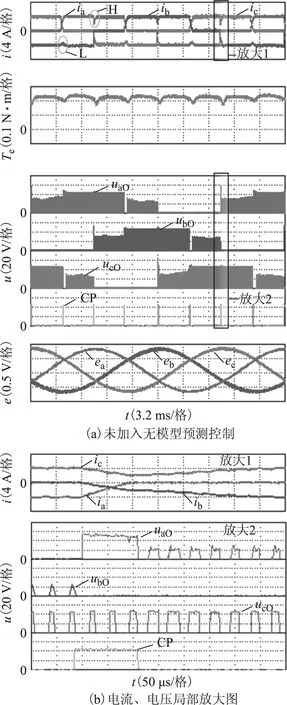
圖6 在額定轉(zhuǎn)速以下的低速條件下未加入無(wú)模型預(yù)測(cè)控制方法的實(shí)驗(yàn)波形Fig.6 Waveforms for method without model free predictive control in the condition of low speed
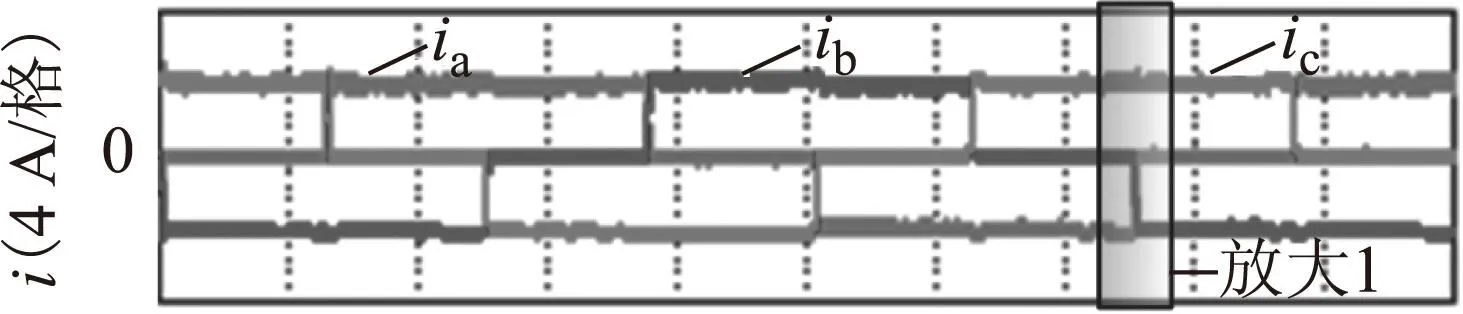
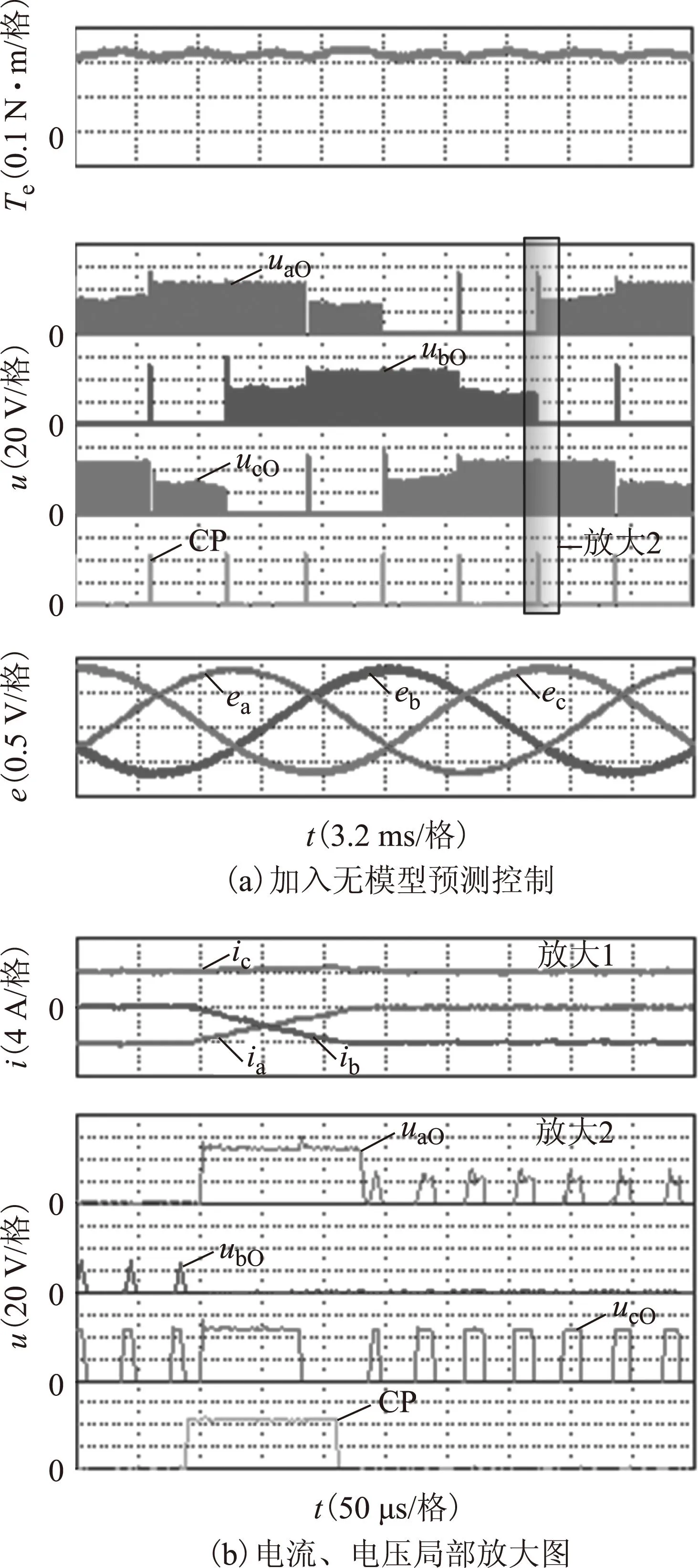
圖7 在額定轉(zhuǎn)速以下的低速條件下加入無(wú)模型預(yù)測(cè)控制方法的實(shí)驗(yàn)波形Fig.7 Waveforms for method with model free predictive control in the condition of low speed
圖8為無(wú)刷直流電機(jī)在TL=0.23 N·m,額定轉(zhuǎn)速以下的高速條件下未加入無(wú)模型預(yù)測(cè)控制,速度、電流雙閉環(huán)PI控制時(shí)的三相電流、電磁轉(zhuǎn)矩、三相端電壓以及三相反電動(dòng)勢(shì)實(shí)驗(yàn)波形。圖9是加入無(wú)模型預(yù)測(cè)控制時(shí)的實(shí)驗(yàn)波形。對(duì)比圖8和圖9可以看出,在額定轉(zhuǎn)速以下的高速下,采用無(wú)模型預(yù)測(cè)控制可以較好地抑制換相過(guò)程引起的轉(zhuǎn)矩波動(dòng)。在額定轉(zhuǎn)速以下的高速下無(wú)模型預(yù)測(cè)控制方法也可以控制三相繞組電流變化率,使開(kāi)通相電流上升速率與關(guān)斷相電流下降速率保持一致,即對(duì)關(guān)斷相和非換相相的功率開(kāi)關(guān)管進(jìn)行控制,進(jìn)而減小非換相相繞組電流波動(dòng),達(dá)到抑制換相轉(zhuǎn)矩波動(dòng)的目的。
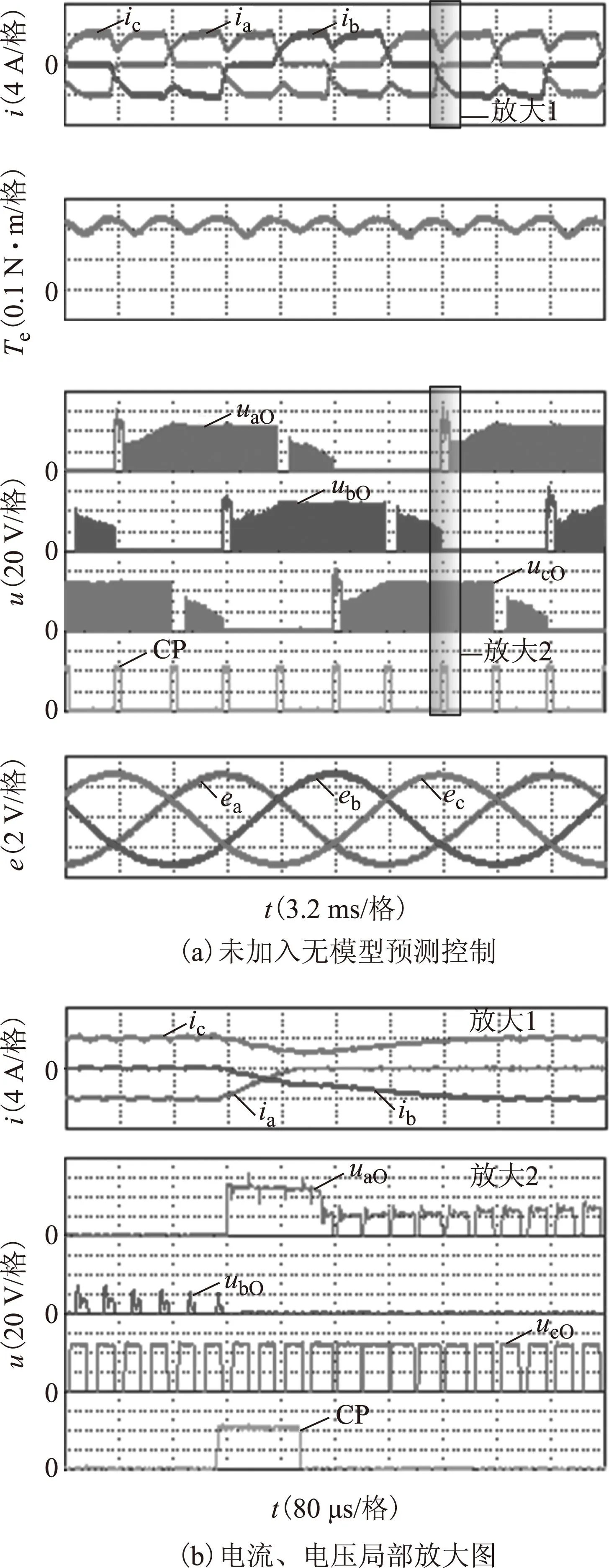
圖8 在額定轉(zhuǎn)速以下的高速條件下未加入無(wú)模型預(yù)測(cè)控制方法的實(shí)驗(yàn)波形Fig.8 Waveforms for method without model free predictive control in the condition of high speed
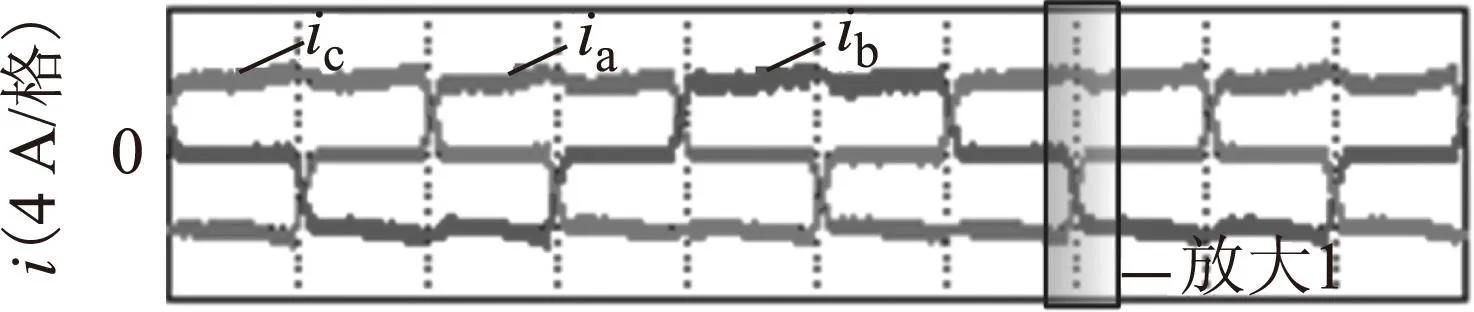

圖9 在額定轉(zhuǎn)速以下的高速條件下加入無(wú)模型預(yù)測(cè)控制方法的實(shí)驗(yàn)波形Fig.9 Waveforms for method with model free predictive control in the condition of high speed
4 結(jié)論
本文針對(duì)無(wú)刷直流電機(jī)運(yùn)行過(guò)程中存在較大換相轉(zhuǎn)矩波動(dòng)的問(wèn)題,提出了一種無(wú)模型預(yù)測(cè)控制方法,推導(dǎo)了無(wú)刷直流電機(jī)的泛模型表達(dá)式。控制過(guò)程中不需要精準(zhǔn)的電機(jī)電感及電阻參數(shù),解決了實(shí)際應(yīng)用中電阻值和電感值測(cè)量困難且不準(zhǔn)確的問(wèn)題。無(wú)模型預(yù)測(cè)控制方法可以適用于無(wú)刷直流電機(jī)全速范圍內(nèi)的換相轉(zhuǎn)矩波動(dòng)抑制,在額定轉(zhuǎn)速以下的高速、低速下無(wú)需切換,算法簡(jiǎn)單易實(shí)現(xiàn)。
[1]崔臣君,劉剛,鄭世強(qiáng).基于線反電動(dòng)勢(shì)的高速磁懸浮無(wú)刷直流電機(jī)無(wú)位置換相策略[J].電工技術(shù)學(xué)報(bào),2014,29(9):119-128.
Cui Chenjun,Liu Gang,Zheng Shiqiang.Commutation strategy of high-speed maglev brushless DC motors based on the line-to-line back-EMF without position sensor[J].Transactions of China Electrotechnical Society,2014,29(9):119-128.
[2]夏長(zhǎng)亮.無(wú)刷直流電機(jī)控制系統(tǒng)[M].北京:科學(xué)出版社,2009.
[3]譚建成.永磁無(wú)刷直流電機(jī)技術(shù)[M].北京:機(jī)械工業(yè)出版社,2011.
[4]王大方,卜德明,朱成,等.一種減小無(wú)刷直流電機(jī)換相轉(zhuǎn)矩脈動(dòng)的調(diào)制方法[J].電工技術(shù)學(xué)報(bào),2014,29(5):160-165.
Wang Dafang,Bu Deming,Zhu Cheng,et al.A modulation method to decrease commutation torque ripple of brushless DC motors[J].Transactions of China Electrotechnical Society,2014,29(5):160-165.
[5]李珍國(guó),章松發(fā),周生海,等.考慮轉(zhuǎn)矩脈動(dòng)最小化的無(wú)刷直流電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)[J].電工技術(shù)學(xué)報(bào),2014,29(1):139-146.
Li Zhenguo,Zhang Songfa,Zhou Shenghai,et al.Direct torque control of brushless DC motor considering torque ripple minimization[J].Transactions of China Electrotechnical Society,2014,29(1):139-146.
[6]Pillay P,Krishnan R.Modeling,simulation,and analysis of permanent-magnet motor drives,Part Ⅱ:the brushless DC motor drive[J].IEEE Transactions on Industry Applications,1989,25(2):274-279.
[7]Shi Tingna,Guo Yuntao,Song Peng.A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J].IEEE Transactions on Industrial Electronics,2010,57(10):3483-3490.
[8]Kim G H,Kang S J,Won J S.Analysis of the commutation torque ripple effect for BLDCM fed by HCRPWM-VSI[C]//Proceedings of IEEE Conference on Applied Power Electronics Conference and Exposition,Boston,1992:277-284.
[9]Song J H,Choy I.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Transactions on Power Electronics,2004,19(2):312-319.
[10]林平,韋鯤,張仲超.新型無(wú)刷直流電機(jī)換相轉(zhuǎn)矩脈動(dòng)的抑制控制方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2005,26(3):153-158.
Lin Ping,Wei Kun,Zhang Zhongchao.A novel control scheme to suppress the commutation torque ripple in BLDCM[J].Proceedings of the CSEE,2005,26(3):153-158.
[11]李自成,尹周平,熊有倫.無(wú)刷直流電機(jī)換相轉(zhuǎn)矩脈動(dòng)分析及抑制[J].華中科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,40(2):74-78.
Li Zicheng,Yin Zhouping,Xiong Youlun.Analysis and reduction of torque ripple in brushless DC motorings[J].Journal of Huazhong University of Science & Technical(Natural Science Edition),2012,40(2):74-78.
[12]Shi Jian,Li TieCai.New Method to eliminate commutation torque ripple of brushless DC motor with minimum commutation time[J].IEEE Transactions on Industrial Electronics,2013,60(6):2139-2146.
[13]夏長(zhǎng)亮,張茂華,王迎發(fā),等.永磁無(wú)刷直流電機(jī)直接轉(zhuǎn)矩控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2008,28(6):104-109.
Xia Changliang,Zhang Maohua,Wang Yingfa,et al.The direct torque control for permanent magnet brushless DC motors[J].Proceedings of the CSEE,2008,28(6):104-109.
[14]Bu X,Hou Z,Yu F,et al.Robust model free adaptive control with measurement disturbance[J].IET Control Theory and Applications,2012,6(9):1288-1296.
Model Free Predictive Control Method to Suppress Commutation Torque Ripple for Brushless DC Motor
Shi Tingna1Li Cong1Jiang Guokai1Xia Changliang1,2
(1.School of Electrical Engineering and AutomationTianjin UniversityTianjin300072China 2.Tianjin Key Laboratory of Advanced Technology of Electrical Engineering and Energy Tianjin Polytechnic UniversityTianjin300387China)
The torque ripple of brushless DC motor (BLDCM) generated in the commutation process seriously affects their applications in the precision servo system.This paper presents a model free predictive control method,which combines the universal model and the predictive control,to suppress the commutation torque ripple of the BLDCM.In this paper,the expression of the universal model of the brushless DC motor control system is derived.By taking the universal model as the predictive model to select the optimal switch state through the value function,the non-commutation phase current can be kept constant.The experimental results show that the proposed method can effectively suppress the commutation torque ripple of the BLDCM in both low and high speeds under the rated speed.Since parameters of electric machines are not necessary in the proposed control process,the algorithm is simple and easy to realize.
Brushless DC motor,torque ripple,model free predictive control,value function
2014-07-23改稿日期2014-12-15
史婷娜女,1969年生,教授,博士生導(dǎo)師,研究方向?yàn)殡姍C(jī)及其控制。
E-mail:tnshi@tju.edu.cn(通信作者)
李聰女,1990年生,碩士,研究方向?yàn)闊o(wú)刷直流電機(jī)及其控制。
E-mail:licong2012@tju.edu.cn
國(guó)家重點(diǎn)基礎(chǔ)研究發(fā)展計(jì)劃(973計(jì)劃)(2013CB035600)資助項(xiàng)目。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19