大尺寸縮比自由飛模型慣性矩測量與調整方法
2016-08-30 06:49:22王立波馬坤杜歡王永超
飛行力學 2016年4期
王立波, 馬坤, 杜歡, 王永超
(中航工業西安飛機設計研究所 總體氣動設計研究所, 陜西 西安 710089)
?
大尺寸縮比自由飛模型慣性矩測量與調整方法
王立波, 馬坤, 杜歡, 王永超
(中航工業西安飛機設計研究所 總體氣動設計研究所, 陜西 西安 710089)
給出了雙線擺法測大尺寸縮比自由飛試驗模型慣性矩的方法和流程,并根據飛機類模型的慣性矩特點,提出了大尺寸縮比自由飛試驗模型慣性矩調整所需的配重計算方法。雙線擺法測量原理簡單,不需要復雜的測量設備,具有較好的工程實用性。應用實例證明,模型飛機調整后的慣性矩與目標狀態符合較好,測量精度滿足工程應用要求。
慣性矩; 配重計算; 雙線擺; 模型自由飛試驗
0 引言
模型自由飛試驗領域的科學研究與實踐貫穿于飛機發展的百年長河,至今仍具有強大的生命力與發展價值。長期以來,國內外都曾通過豐富的模型自由飛試驗對目標飛行器的氣動布局、氣動特性、操穩特性和飛行控制律開展探索、試驗或驗證,模型自由飛試驗已成為有效支撐目標飛行器設計、化解技術風險、提高技術成熟度的飛行試驗綜合研究手段[1-3]。
近年來,小型動力裝置、數據鏈路、自主飛行和遙控遙測設備性能的提升與發展,進一步促進了模型自由飛試驗技術水平的大幅度提升。試驗模型的系統更加精細和復雜,同時也使得模型的尺寸越來越大。
質量特性相似是縮比自由飛試驗模型設計與制造的一項重要相似準則,即自由飛試驗模型必須經過總裝調配,使內部設備和配重合理分布,進而保證模型的質量、重心和慣性矩等質量特性參數與原準機保持相似關系[4]。目前,物體慣性矩的測量方法主要包括:
(1)雙線擺法[5-6]。該方法比較適合測量外形復雜物體的慣性矩,其試驗裝置簡單,對場地要求小,操作簡便,計算公式簡潔明了。
(2)三線擺法[7]。該方法比較適合測量外形簡單的物體(如導彈模型)的慣性矩,其懸線較多,同時需要較為復雜的夾具與懸掛機構,對于飛機這類z向尺寸遠小于x,y向尺寸的物體,用三線擺法不太方便。
(3)扭擺法[8]。該方法通常采用一套專用設備進行測量,與前兩種方法相比,減少了中間傳遞量,可有效提高測量精度,但由于需要專用設備,待測物體的尺寸和質量均受儀器的空間和量程限制,同時專用設備系統復雜,購置、維護的成本較高。
對于大比例縮比驗證機而言,一種快速、高效、經濟的全機慣性矩測量和調整手段必不可少,是縮比模型自由飛試驗順利開展的重要保證。
1 理論基礎
1.1雙線擺法理論基礎
如圖1所示,在被測構件上選取A,B兩點,用兩根長度均為l的平行擺線AC,BD懸掛起來。擺線上端點C,D位于同一水平面內,且兩平行擺線間距為2a。對構件施加水平力偶矩使構件繞其中心線偏離平衡位置后撤去外力,使構件做往復自由擺動構成雙線擺,從而借助雙線擺特性來測定被測構件的慣性矩。
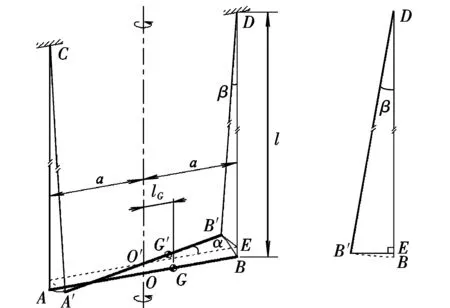
圖1 雙線擺原理圖Fig.1 Principles of the bifilar pendulum
已知被測構件的質量為m,重心G位于懸掛點A,B之間,與雙線擺中心線的距離為lG。假設擺線的質量與被測構件相比可忽略不計,并忽略擺線的彈性和雙線擺的阻尼,列寫雙線擺自由振動情況下的動力學方程。被測構件的運動可看作是構件繞雙線擺中心線的剛體轉動和沿雙線擺中心線的剛體平動兩種運動的復合。令構件偏轉α角時,構件重心上升量為h,那么構件的動能E和勢能V可分別表示為:
(1)

(2)
式中:I0為構件繞雙線擺中心線的慣性矩。被測構件繞通過質心G與雙線擺中心線平行的轉軸的慣性矩為:
(3)
根據圖1所示幾何關系,h=BE,有:
(4)
(5)
將式(4)和式(5)的結果代入式(1)和式(2),得到:
(6)
(7)
對于微角擺動,即擺角α很小,則有sinα≈α。代入式(6)和式(7),忽略其中的二次及二次以上的小量后得到:
(8)
(9)
由此得到系統的Lagrange函數為:
(10)
對于自由度α,滿足Lagrange的運動方程為:
(11)
將式(10)結果代入式(11),得到雙線擺微角振動的動力學平衡方程為:
(12)

(13)
顯然,式(13)描述的是一種簡諧振動,其振動周期為:
(14)
那么,被測構件繞雙線擺中心線的慣性矩為:
(15)
根據式(3)可知,被測構件繞通過質心G與雙線擺中心線平行的轉軸的慣性矩為:
(16)
1.2大尺寸模型飛機的慣性矩測量方法
基于上述雙線擺法理論基礎,對縮比驗證機相對機體坐標系的慣性矩進行測定。如圖2所示,將模型通過卡具按雙線擺方式吊掛,并通過調整擺線的位置,保證模型的機身軸線處于豎直位置。兩根擺線相對于機身軸線對稱布置,同時為滿足長擺線的要求,應當使擺線長度與擺線間距滿足l≥10a。使模型繞雙擺線中心線自由擺動,記錄20~25個周期的總時間,求出擺動的平均周期Tx,應用慣性矩計算公式,求得模型滾轉慣性矩為:
(17)

圖2 滾轉慣性矩測定時雙線擺布置圖Fig.2 Layout of bifilar pendulum for Ixxmeasuring
同理,將模型按圖3和圖4方式吊掛,即可分別測算得到模型的俯仰慣性矩和偏航慣性矩如下:
(18)
(19)

圖3 俯仰慣性矩測定時雙線擺布置圖Fig.3 Layout of bifilar pendulum for Iyymeasuring
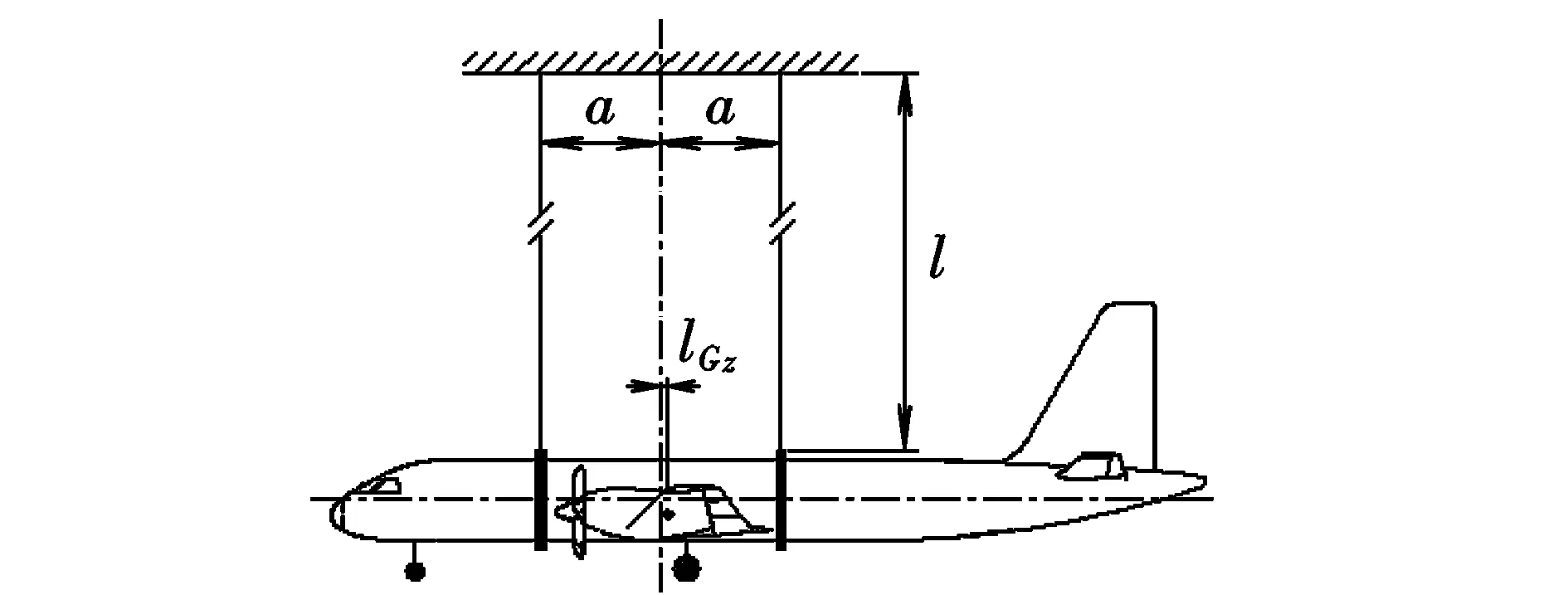
圖4 偏航慣性矩測定時雙線擺布置圖Fig.4 Layout of bifilar pendulum for Izzmeasuring
1.3大尺寸模型飛機的慣性矩調整方法
飛機通常由機身、機翼和尾翼幾大部件組成,其在立軸方向的尺寸要遠小于在縱軸和橫軸方向的尺寸。因此,一架飛機慣性矩分布一般滿足以下關系式:
(20)
利用上述關系式,可使縮比自由飛模型調整全機慣性矩時的配重方案計算過程大大簡化,具體配重方案如圖5所示。

圖5 用于慣性矩調整的配重方案示意圖Fig.5 Layout of counterweight for moment of inertia adjustment
令左右翼尖處的配重質量為m1,沿機身軸線從前到后的配重質量分別為m2,m3和m4。已知配重前模型的質量和慣性矩分別為m0,Ixx0,Iyy0和Izz0,配重后模型的質量和慣性矩分別為m,Ixx,Iyy和Izz。在圖5所示的坐標軸系下,各配重物相對目標重心的坐標位置差分別為(xi,yi,zi)。各配重物的位置一經確定,配重方案中僅含4個未知數,即各配重質量的大小。
以配重后全機總重、重心縱向位置,以及全機滾轉慣矩和偏航慣矩作為約束條件,同時認為配重前后的重心位置不變,且各配重物繞各自重心的轉動慣性矩相對于全機慣性矩可以忽略,列出平衡方程如下:
(21)
將上式整理成矩陣形式得到:
(22)
其中:
A=
通過求解代數方程組,即可得到各配重物的質量:
(23)
2 應用實例
某飛機帶動力縮比驗證機翼展4m,縮尺比例為1:7,采用兩臺電機驅動螺旋槳作為動力,用于氣動布局可行性探索研究和低速操穩特性試飛驗證。
縮比驗證機制造和裝配工序完成后,按照縮比模型自由飛試驗要求,在飛行試驗開始前需對該縮比驗證機的質量、重心及慣量特性進行測量和調整,使得縮比模型與原準機之間滿足質量特性相似要求。
某飛機及其縮比驗證機質量/慣量目標狀態具體參數如表1所示,兩者重心位置均位于34%MAC處。
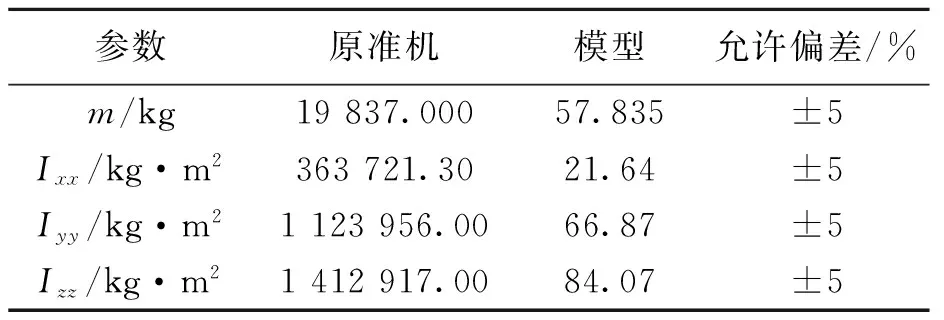
表1 某飛機與縮比模型質量/慣量目標狀態Table1 Requirementsformasscharacteristicsadjustmentofthetestmodel
利用雙線擺方法測算得到縮比驗證機的初始慣性矩分別為Ixx=11.63 kg·m2,Iyy=37.18 kg·m2,Izz=46.21 kg·m2。選定4個配重點,計算得到的各配重點的質量如表2所示。

表2 縮比模型配重方案Table2 Counterweightdistributionofthetestmodel
表3給出了配重后模型的質量和慣性矩實測值與計算值的對比。結果顯示采用雙線擺法得到的慣性矩測量結果與計算結果符合良好,其測量精度滿足工程應用要求。
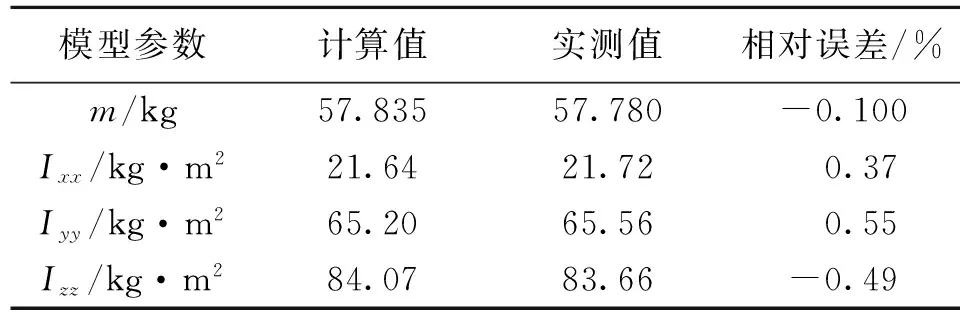
表3 配重后模型慣量的實測值與計算值對比Table3 Comparisonofmassandinertiamomentmeasurementofcounterweightedtestmodelwithcalculationresults
表4給出了配重后模型的質量和慣性矩實測值與目標值的對比情況。結果顯示采用本文的慣性矩調整方法得到的模型,其慣性矩與目標慣性矩精度均可控制在2%以內,同樣滿足工程應用的要求。
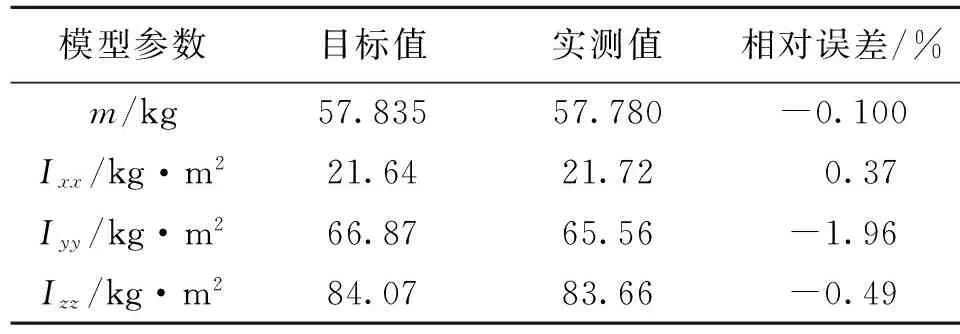
表4 配重后模型慣量的實測值與目標值對比Table4 Comparisonofmassandinertiamomentmeasurementofcounterweightedtestmodelwithdesignrequirements
需要說明的是,本次試驗未將俯仰慣性矩作為約束條件,因此俯仰慣性矩的實測值與目標值之間的誤差相對較大。在實際應用中,可視情況引入俯仰慣性矩目標值作為約束條件,只需在重心附近的機身軸線處增加一個配重點,使得方程組(22)滿秩即可。
3 結束語
本文給出了采用雙線擺法測量大尺寸縮比自由飛試驗模型慣性矩的方法和流程。根據飛機類模型
的慣性矩特點,提出了一種大尺寸縮比自由飛試驗模型慣性矩調整所需的配重計算方法。應用實例證明,模型飛機調整后的慣性矩值與目標狀態符合較好,其測量精度滿足工程應用要求,并且該方法不需要復雜的測量設備,具有較好的工程操作性。本文只給出了單個質量構型的配重方案計算實例,多個質量構型的配重方案優化以及對縮比自由飛模型初始構型慣量的設計要求還有待進一步的整理和研究。
[1]劉尚民,趙磊.電傳飛機模型自由飛試驗飛行控制技術研究[J].飛行力學,2012,30(1):83-86.
[2]Risch T,Cosentino G,Regan C D.X-48B flight-test progress overview [R].AIAA-2009-934,2009.
[3]Ratnayake N A,Koshimotoy E T,Taylorz B R.Multi-axis identifiability using single-surface parameter estimation maneuvers on the X-48B blended wing body [R].AIAA-2011-6273,2011.
[4]中國人民解放軍總裝備部軍事訓練教材編輯工作委員會.模型自由飛試驗[M].北京:國防工業出版社,2001:233-251.
[5]黎肄彪.自由飛試驗模型慣性矩的測定[J].流體力學實驗與測量,2002,16(2):88-91.
[6]吳秀芳,柳濤.雙線擺的周期及其測定[J].廣西物理,1998,19(2):39-42.
[7]葛宇宏.長擺線三線擺大擺角擺動測定剛體轉動慣量[J].機械科學與技術,2010,29(6):792-796.
[8]唐文彥,李慧鵬,張春富.扭擺法測量飛行體轉動慣量[J].南京理工大學學報(自然科學版),2008,32(1):69-72.
(編輯:崔立峰)
A mass moment of inertia measuring and adjustment method for free-flight models
WANG Li-bo, MA Kun, DU Huan, WANG Yong-chao
(General Configuration and Aerodynamic Design Institute, AVIC Xi’an Aircraft Design Institute,Xi’an 710089, China)
Based on the theory of bifilar pendulum, a method for measuring the mass moment of inertia of the free-flight models was proposed in this paper, especially for the scaled demonstrators with large sizes. The counterweight calculation procedure for the mass moment of inertia adjustment was also established, where the characteristics of the mass moment of inertia distribution of the aircraft was adopted. The advantage of the bifilar pendulum method includes: simple measuring principle, easy operation, and neither expensive nor complicated device needed during the measuring progress. The application example indicates that the experiment result coincides well with the target value of the mass moment of inertia, which confirms that the method proposed in this paper is suitable for engineering application.
moment of inertia; counterweight calculation; bifilar pendulum; model free-flight test
2016-02-04;
2016-03-28; 網絡出版時間:2016-03-29 15:37
王立波(1985-),男,浙江上虞人,工程師,博士,研究方向為飛機氣動布局設計與縮比模型自由飛試驗技術。
V216.7; V217.4
A
1002-0853(2016)04-0077-04
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國生殖健康(2019年2期)2019-08-23 08:12:08
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
