立式風洞全視場尾旋姿態測量技術研究
2016-08-31 12:06:13秦三春熊建軍
實驗流體力學 2016年6期
馬 軍,宋 晉,劉 蓓,秦三春,熊建軍,蔣 敏
(1.中國空氣動力研究與發展中心,四川綿陽 621000;2.重慶大學自動化學院,重慶 400044)
立式風洞全視場尾旋姿態測量技術研究
馬 軍1,*,宋 晉1,2,劉 蓓1,秦三春1,熊建軍1,蔣 敏1
(1.中國空氣動力研究與發展中心,四川綿陽 621000;2.重慶大學自動化學院,重慶 400044)
尾旋運動是飛機的一種非正常的極限飛行狀態,復雜并且危險,極易造成飛行事故。在立式風洞中開展尾旋實驗是研究尾旋現象的主要技術手段之一,目的是為了獲取實驗過程中模型飛機的姿態角,用于對其尾旋特性進行分析。針對尾旋實驗運動狀態的特點,以及雙目測量系統在以往實驗應用中的缺陷,設計了一種全視場測量方案,并圍繞其關鍵技術問題開展了研究,使用編碼標記識別技術實現特征標記的自動識別,通過基于剛體的三維重建技術實現模型姿態的測量,采用基于共同基準平面的數據標定方法實現多視角姿態數據的有效融合。通過立式風洞尾旋實驗驗證了該技術的有效性及可靠性,實驗結果曲線完整,圖像利用率達到了95%,為尾旋運動特性分析提供了更加豐富的數據支撐。
尾旋;立式風洞;編碼標記;全視場
0 引 言
在立式風洞中開展尾旋自由飛實驗是研究失速尾旋現象的一種重要的手段,實驗主要獲取的參數是尾旋過程中模型飛機的姿態角,國內外相關研究機構大多數采用基于機器視覺的技術進行研究[1-8]。基于機器視覺的尾旋姿態測量方法通過在模型機身上粘貼圓、十字等特征標記,識別并計算這些標記點的三維坐標,通過坐標值來擬合模型的橫軸和縱軸,再應用三角函數關系來計算尾旋姿態參數。但由于尾旋實驗屬于動態實驗,一方面,模型運動范圍較大,標記的位置會隨著模型的運動出現大幅度的移動,標記匹配難度大,無法使用位置信息進行判別。雖然可以通過多個標記之間的幾何位置關系來作為判別條件,對于一些典型姿態該方法能起到一定的作用,但尾旋實驗中模型的姿態是時刻變化的,該判別條件在大多數非典型姿態下都是失效的,而對于立體視覺技術而言,標記區分錯誤會導致圖像的匹配錯誤,進而解算出錯誤的姿態角。另一方面,標記容易被遮擋,測量視場存在盲區。雙目測量系統的2部相機固定安裝在某一位置,而實驗過程中模型處于旋轉運動狀態,模型表面粘貼的標記容易被遮擋,使得采集圖像中缺少用于姿態解算的標記位置信息。此外,當模型運動幅度較大時,尤其是尾旋改出的時候,模型往往會飛出測量相機的視場范圍,雖然調整鏡頭放大視場可以將整個尾旋過程限定在視場之內,但這會使模型上的標記在圖像中所占像素太少,不能準確識別標記。
正是由于標記遮擋、視場盲區和多標記區分匹配難度大等問題,導致尾旋運動姿態測量數據不連續、不完整,影響尾旋特性的分析,需要設計更加有效的方法,對該項測量技術進行改進和完善。
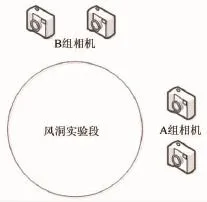
圖1 系統相機布局設計Fig.1 System cameras arrangement
1 總體方案設計
針對上述尾旋姿態測量方法中存在的問題,在雙目測量系統的基礎上設計提出了全視場風洞尾旋姿態測量方案。全視場測量是指覆蓋尾旋運動全過程全范圍的姿態測量。由于尾旋實驗中模型運動范圍較大,一組雙目測量系統的視場范圍有限,只能側重于穩定尾旋或尾旋改出階段,無法兼顧兩者,且從單一的測量視角采集到的圖像有時會出現標記遮擋現象,造成了數據丟失。因此提出了一種采用2組雙目測量系統協同工作的方案,使2組系統的視場分別側重于穩定尾旋和尾旋改出階段,同時又有一定程度的交叉,全視場測量系統的視場覆蓋尾旋運動的全過程,且從2個視角采集圖像,可以消除采集角度不佳及標記被遮擋的所帶來的影響。
1.1 測量視場布局
系統布局采用4部CCD相機,分為A、B 2組,每組各2部相機,分別進行相機標定,形成2組雙目測量子系統,4部相機通過外部TTL同步信號實現同步觸發采集。其中A組主要測量穩定尾旋階段,將視場聚焦在實驗段中心。B組主要測量尾旋改出階段,與A組相機大致呈90°夾角,視場聚焦在實驗段邊緣處,如圖1所示。
1.2 硬件系統設計
測量系統硬件采用PXI-E總線平臺,機箱為NI公司的PXI-E 1082,嵌入式控制器為PXI-E 8133,圖像采集卡接口采用Camera Link標準,該標準可提供最高為680Mb/s的帶寬,滿足采集頻率為20 Hz時圖像的實時傳輸存儲需求。4塊NI PXI-1428分別對4部CCD相機進行采集控制,CCD相機采用JAI公司的CV-M4+CL單色相機,最大分辨率1380 pixel×1040 pixel,采集頻率24 Hz(全幅面)。
1.3 軟件系統設計
測量系統的軟件主要包括圖像采集模塊、參數標定模塊、標記識別模塊、三維重構模塊和數據融合模塊。圖像采集模塊包括單幀抓取及連續采集的功能,單幀抓取模式主要用于測量系統標定,連續采集模式主要用于實驗圖像的采集與存貯。參數標定模塊用于確定測量系統基準,標記識別模塊用于編碼標記的自動識別,三維重構模塊用于模型姿態解算,數據融合模塊用于測量結果的銜接融合。
2 關鍵技術

圖2 編碼標記Fig.2 Coded marker
2.1 編碼標記識別算法
為實現人工標記的自動準確匹配,本文采用了一種編碼標記作為識別目標。編碼標記如圖2所示。編碼標記中心為圓形目標點,周圍是與其同心的分段環狀,用來對標記進行編碼稱為編碼環帶。圓環等分為8份,每份45°,作為一個二進制位。
圖像識別算法分為3步:
(1)二值化與邊緣檢測。標記圖像的灰度直方圖具有雙峰的特征,使用自適應的最大類間方差法(OTSU法)[910],把圖像的灰度數按灰度級分成目標和背景2個部分,根據計算所得方差來尋求一個適當的灰度值進行劃分,可實現自動選取閾值進行二值化。再通過Canny算子進行邊緣檢測,通過一階微分的極大值確定邊緣點[11]。
(2)基于二次曲線的橢圓中心定位。編碼標記點的內部圓形經CCD成像后變為橢圓,因此對圓心的定位操作也就是檢測橢圓中心點的操作[12]。設橢圓方程為:

獲得參數向量矩陣β=[A,B,C,D,E,F],進而計算中間參數:
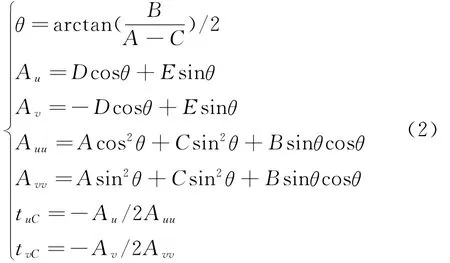
獲取橢圓中心在圖像上的二維坐標Cu、Cv如下:

(3)編碼環帶解碼。找到圓心在圖像坐標系下的坐標值,對中心橢圓進行逆仿射變換,使其成為單位圓。并根據圓心角計算該編碼環帶上所包含的0或1的個數,記錄成8位的二進制,移位取最小數值作為編碼值。
通過以上3個步驟可以完成編碼標記的識別,識別效果如圖3所示。

圖3 編碼標記識別效果Fig.3 Coded marker recognition effect
2.2 特征點三維重建
雙目測量系統利用立體視差的原理,使用已經標定過的2部相機獲得同一場景點P的2幅左右不同的圖像I1、I2,通過尋找P點在左右2幅圖像上的匹配像點P1(U1,V1)和P2(U2,V2),再通過標定參數來獲取該點的空間三維坐標信息。
空間點P在雙目測量系統中的成像關系如圖4所示。OwXwYwZw為空間世界坐標;C1、C2表示左右2部相機;O1、O2分別為2部相機對應的光心位置。空間點P點在相機C1上成像的圖像點為p1,圖像的二維坐標為(ul,vl),P點在相機C2上成像點為p2,圖像的二維坐標為(ur,vr)。當世界坐標系建立在左相機C1上,以針孔模型為攝像機成像模型,則根據空間幾何關系可以推導出空間點P(x,y,z)的三維坐標。
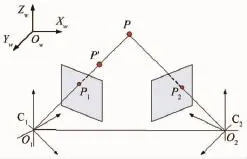
圖4 雙目測量系統原理Fig.4 Principle of binocular stereo vision
2.3 基于坐標系轉換的姿態角算法
模型飛機的姿態角可以通過體軸系和風軸系的坐標軸和平面之間的關系來描述。俯仰角α為體軸系縱軸OpXp與風軸系平面XwOwYw的夾角,可以轉化為體軸系縱軸OpXp與風軸系豎軸OwZw之間夾角;偏航角β為體軸系縱軸OpXp在風軸系XwOwYw面的投影與OwXw之間的夾角;滾轉角為體軸系橫軸OpYp與風軸系平面XwOwYw的夾角γ,可以轉化為體軸系橫軸OpYp與風軸系豎軸OwZw之間的夾角。
在實驗準備階段,首先利用三坐標測量機獲得體軸系中粘貼在飛機上編碼標記圓心三維坐標,記為(xi,yi,zi)(i=1,2…n)。在風洞實驗中通過雙目測量系統獲取風軸系下飛機上編碼點三維坐標,記為(Xi,Yi,Zi)(i=1,2…n)。對于2個坐標系的關系,只需要找到2個坐標系下3個以上公共三維點就可以計算出2個坐標系的旋轉平移關系。設體軸系到風軸系的轉換關系如式(4)所示:

要獲取參數R和T,只需要3個編碼標記點分別體軸系和風軸系下的坐標值便可計算轉換參數,計算過程詳見文獻[13]。將體軸系下的OpXp和OpYp向量轉換到風軸系OwXwYwZw下,即:

取單位向量,OpXp=[1,0,0],OpYp=[0,1,0];OpXp′與OpYp′為轉換到風軸系下的向量;OpXp″為OpXp′在XwOwYw平面上的投影,R,T為OpXpYpZp到OwXwYwZw的轉換參數。設OwZw=[0,0,1],則3個角度可以通過式(6)獲得:
2.4 模型姿態數據融合方法
A、B 2組立體視覺系統雖然是分別標定,但采用的方法均為張正友提出的平板標定法[14],該算法建立的測量坐標系軸向取決于第一張標定圖片。因此只要2組立體視覺系統共用第一張標定圖像,那么2組測量系統的標定基準坐標系就是統一的,雖然經過坐標轉換后的測量坐標系原點分別落在2組雙目系統的左相機處,但坐標軸系還是方向一致的。尾旋實驗過程中的3個姿態角都是相對于坐標軸方向解算出的角度,因此在2組相機的公共視場內獲取的結果數據是一致的。A、B 2組系統同步采集圖像,獲取2組數據,由于2組系統的相機視場既有交匯又各有側重點,因此除公共視場內的相同點外,2組數據中的斷點大致可形成互補的形態,通過2組數據的拼接組合,就形成了一條新的數據曲線,消除了斷點,提高了數據完整性。
具體方法為:2組CCD相機所獲取的數據是相互獨立的,當只有其中一組相機獲取的圖像能夠識別計算出姿態數據時,則選取該組數據作為有效數據;當2組相機都獲取到姿態數據時,則需要依據測量誤差量值,選取誤差較小的數據點作為有效數據。姿態角計算精度取決于三維坐標重建的精度,因此,在判定姿態角測量精度時,將風洞坐標系下重建的三維特征點坐標對齊到機身坐標系下的三維特征點坐標,然后比較同一坐標系下對應三維點的點距,即:

式中:ei表示坐標重建的誤差,代表了姿態角的測量誤差。選擇誤差值較小的點作為有效數據點,實現姿態測量數據的有效融合。
3 實 驗
3.1 實驗設備
在Φ5m立式風洞開展尾旋驗證實驗,所采用的實驗設備主要如下:
(1)CCD相機:用于采集原始實驗圖像。
(2)PXI控制系統:用于控制相機,計算數據。
(3)三坐標測量儀:測量編碼標記在機體坐標系中的坐標值。
(4)8位編碼標記帖:粘貼在模型表面用于識別的人工標記。
3.2 實驗內容及數據分析
為保障該技術針對不同的尾旋狀態均有較好的實驗效果,通過全視場系統和雙目測量系統開展了不同狀態的對比實驗,以滿足考核的全面性,具體如下:正飛平尾旋2次;倒飛平尾旋2次;倒飛振蕩尾旋1次。4個CCD攝錄的典型實驗圖像如圖5所示,典型對比數據曲線如圖6所示,實驗數據統計如表1所示。

圖5 4個CCD攝錄的典型實驗圖像Fig.5 Typicaltest images of 4 CCD cameras
通過圖6的對比曲線可以發現雙目測量系統缺失的數據點較多,圖像利用率在60%左右,而全視場系統獲取的數據曲線斷點較少,根據表1的統計數據,在不同的尾旋狀態下,圖像利用率可達到95%。

圖6 典型對比數據曲線Fig.6 Curves of typical contrastive data
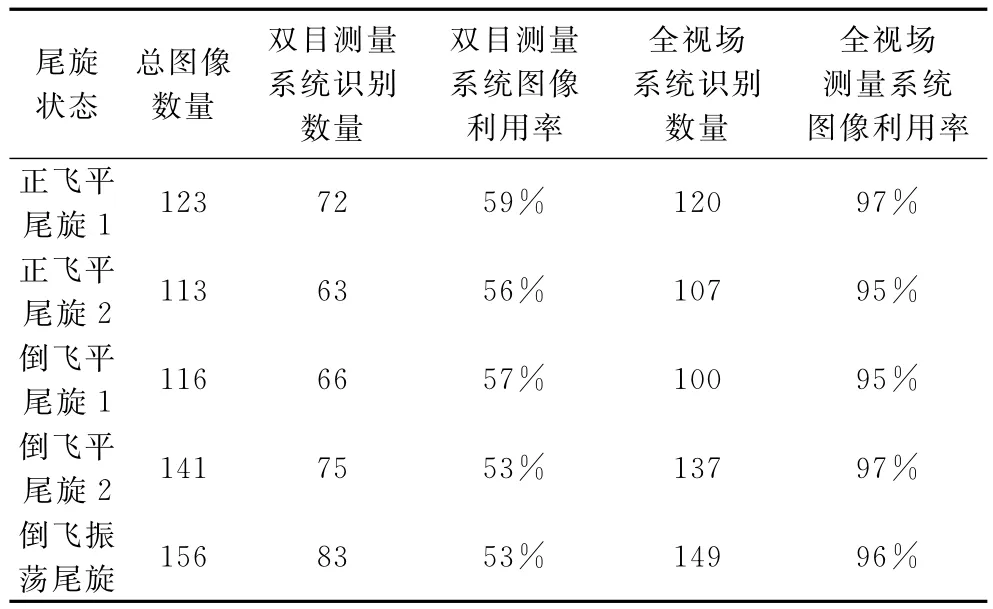
表1 實驗數據統計Table 1 Statistics of test data
4 結 論
針對尾旋運動狀態的特點,設計了一種基于編碼標記識別技術和2組雙目測量系統的全視場測量方案,并圍繞其關鍵技術問題開展了研究,采用編碼標記識別技術實現特征標記的自動識別,采用基于剛體的三維重建技術實現模型姿態的準確測量、采用基于共同基準平面的數據標定方法實現多視角姿態數據的有效融合。實驗結果表明該技術能夠為尾旋運動特性分析提供更加豐富的數據支撐。
[1]羅武勝,李沛,李冠章,等.基于計算機視覺的尾旋運動姿態測量方法[J].兵工學報,2009,30(6):820-824.Luo W S,Li P,Li G Z,et al.A method of measuring poses of the aircraft model based computer vision[J].Acta Armamentar,2009,30(6):820-824.
[2]宋晉,馬軍,蔣敏,等.基于立體視覺系統的風洞尾旋試驗測量方法研究[J].計算機測量與控制,2011,19(11):2646-2648.Song J,Ma J,Jiang M,et al.Measurement method research of spin test in wind tunnel based on stereo vision system[J].Computer Measurement &Control,2011,19(11):2646-2648.
[3]黃會明,劉先勇,馬軍,等.飛機尾旋三維測量試驗的改進方法[J].實驗流體力學,2013,27(2):77-81.Huang H M,Liu X Y,Ma J,et al.The improvement method in 3-D measurement of airplane free-spin[J].Journal of Experiments in Fluid Mechanics,2013,27(2):77-81.
[4]Yan S.Theoretic research on effective viewing field of spin vision measurement system[J].ProcSpie,2008,7133:71330N-71330N-6.
[5]Li P,Luo W S,Li G Z,et al.Stereo vision for spin tests in the vertical wind tunnel[C]//First IEEE International Conference on information Science and Engineering,IEEE Computer Society,2009.
[6]Song J,Ma J,Jiang M,et al.Measurement based on machine vision for spin test in vertical wind tunnel[C]//Electrical &E-lectronics Engineering,2012.
[7]Shorts M R,Snow W L.Videometric tracking of wind tunnel aerospace models at NASA Langley research center[C]//The Thompson Symposium,University of York,1996:673-689.
[8]Michael Fremaux C.Spin-tunnel investigation of a 1/28-scale model of the NASA F-18 High Alpha Research Vehicle(HARV)with and without vertical tails[R].NASA contractor report,1997.
[9]胡穎.Otsu算法的研究及改進[J].棗莊學院學報,2009,26(5):68-72.Hu Y.Study and improve of Otsu algorithm[J].Journal of Zaozhuang University,2009,26(5):68-72.
[10]胡敏,李梅,汪榮貴.改進的Otsu算法在圖像分割中的應用[J].電子測量與儀器學報,2010,24(5):443-448.Hu M,Li M,Wang R G.Application of an improved Otsu algorithm in image segmentation[J].Journal of Electronic Measurement and Instrument,2010,24(5):443-448.
[11]王克剛,耿國華.Canny邊緣檢測改進中的自適應平滑與增強[J].西安科技大學學報,2008,28(3):577-579.Wang K G,Geng G H.An improved Canny edge detection based on adaptive smoothing and enhancement[J].Jorunal of Xi’an University of Science and Technology,2008,28(3):577-579.
[12]黃會明,劉先勇,段康容.用于機器視覺系統設計的基于二次曲線的橢圓估計[J].傳感器世界,2011,(6):10-14.Huang H M,Liu X Y,Duan K R.Estimation of ellipse based on the conic for machine vision[J].Sensor World,2011,(6):10-14.
[13]王保豐,徐寧,余春平,等.兩種空間直角坐標系轉換參數初值快速計算的方法[J].宇航計測技術,2007,27(4):20-24.Wang B F,Xu N,Yu C P,et al.Quick arithmetics for the transformation approximation of two space rectangular coordinate systems[J].Journal of Astronautic Metrology and Measurement,2007,27(4):20-24.
[14]Zhang Z Y.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
Design and implementationfor full field of view measurement scheme in vertical wind tunnel
Ma Jun1,*,Song Jin1,2,Liu Bei1,Qin Sanchun1,Xiong Jianjun1,Jiang Min1
(1.China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China;2.School of Automation Chongqing University,Chongqing 400044,China)
Spin is a kind of abnormal state of aircraft,complicated and dangerous.It can easily cause flight accident.Spin experiment in vertical wind tunnel is one of the main research technical means.The purpose is to obtain the attitude angle of model aircraft in experimental process,for analysis of its spin characteristics.The paper concentrates its attention on the characteristics of spin motion and the application defect of binocular measurement system in previous experiments.The full field of view measurement scheme is designed,and the research for the key technologies is carried out.The coded marker recognition technology is adopted to realize feature automatic identification.The 3D reconstruction technology based on rigid body is adopted to realize the measurement of model attitude.The date calibration based on the same reference plane is adopted to realize the effective data fusion within multiple angles of view.The effectiveness and reliability of the measurement technology is proved by spin experiment in vertical wind tunnel.The experiment curves are complete,and the image utilization reaches 95%.It provides richer data for characteristics analysis of spin phenomenon.
spin;vertical wind tunnel;coded marker;full field of view
V211.71
A

(編輯:李金勇)
1672-9897(2016)06-0066-06
10.11729/syltlx20160087
2016-06-02;
2016-10-11
*通信作者E-mail:292384225@qq.com
Ma J,Song J,Liu B,et al.Design and implementationfor full field of view measurement scheme in vertical wind tunnel.Journal of Experiments in Fluid Mechanics,2016,30(6):66-70,104.馬 軍,宋 晉,劉 蓓,等.立式風洞全視場尾旋姿態測量技術研究.實驗流體力學,2016,30(6):66-70,104.
馬 軍(1974-),男,重慶人,高級工程師。研究方向:軟件工程、非接觸測量。通信地址:四川綿陽中國空氣動力研究與發展中心(621000)。E-mail:292384225@qq.com
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52