超聲波時差法的三維矢量風測量系
2016-08-31 09:46:13鄧云逸姚振東劉凱邱玲皮波
單片機與嵌入式系統應用 2016年4期
鄧云逸,姚振東,劉凱,邱玲,皮波
(成都信息工程大學 中國氣象局大氣探測重點開放實驗室, 成都 610225)
?
鄧云逸,姚振東,劉凱,邱玲,皮波
(成都信息工程大學 中國氣象局大氣探測重點開放實驗室, 成都 610225)
超聲波測量水平風的技術已經在地面氣象觀測業務中應用多年,效果很好。將這種技術稍加變通,將測量的平面三角形結構變成正四面體結構的不相交兩邊,使之形成具有三維測量能力的特殊結構。采用步進頻率測量技術,將發射的100 kHz頻段的超聲波進行擴頻調制,通過相關接收后獲得脈沖壓縮,兼顧了較低峰值發射功率的接收靈敏度問題,以及超聲波脈寬造成的時間測量精度問題,還具有一定的抗干擾能力。仿真和實驗室初步實驗結果證實了這種方法的可行性。
三維矢量風;超聲波換能器;時差法;正四面體結構
引 言
矢量風(風向和風速)是氣象觀測中的關鍵要素。傳統測風系統因為靈敏度、飽和度以及運動慣性等原因,在風的測量中存在較大的動態誤差[1]。
垂直氣流對天氣、交通運輸、建筑施工、甚至工農業生產等均會產生影響,因此三維矢量風的測量在專業氣象服務中具有重要意義。利用超聲波測風技術進行三維矢量風的測量技術及觀測方法的研究,是氣象觀測研究中的重要工作。
1 超聲波三維風測量原理
1.1超聲波測風原理
本文采用延時估計法來測量風的速度。在傳播工程中超聲波受到順逆風的影響,速度發生改變,通過測量一定距離上超聲波順逆的傳播時間可計算出風速。令位于A、B兩點的超聲波探頭距離為L,A到B為正方向(B到A為負方向),在無風時超聲波的傳播速度為C,AB方向上風速為V(V為正數表示沿AB方向傳播)。
超聲波換能器可以把輸入的電能轉化為機械能(即超聲波)再傳遞出去,同時也能將機械能轉化為電能,它具有發射與接收的功能。當超聲波換能器由A向B發射時(A為發射探頭、B為接收探頭),超聲波傳播為順風方向。超聲波順風、逆風傳播如圖1所示。

圖1 超聲波順風傳播
可以得到以下關系式:
當超聲波換能器由B向A發射時(A為接收探頭、B為發射探頭),超聲波傳播為逆風方向,超聲波逆風傳播如圖2所示。

圖2 超聲波逆風傳播
可以得到以下關系式:
將以上兩式相減,可以得到風速為:
(1)
當V為正值表示風向由A向B,V為負值表示風向由B向A。
1.2三維風的測量
三維風測量是指測量出水平風速和風向與垂直風速和風向。常用的超聲波水平風測風儀為四探頭,三維風測量為六探頭。考慮到系統的風速與風向計算的簡便性,系統采用四探頭構成正四面體結構。在此結構中,垂直風速與水平風速分量由一對超聲波探頭測量出的風速分解而成,與六探頭三維測風儀相比,存在誤差較大。為了提高測量的準確度,在順(逆)風測量時間上采用步進頻率擴頻法,提高測量精度。本系統采用了四探頭正四面體排列結構實現三維測風,即只需要4個探頭便可以測量出X、Y、Z軸上的風速,這比常用的六探頭三維測風節約成本。
如圖3所示,ABCD為一個正四面體,O為ΔABC的中心。
從O點作垂線垂直BD,令這條垂線為Y軸,OZ為Z軸,OD為X軸。將4個超聲波探頭分別放置在正四面體的4個頂點A、B、C、D上。A、B與C、D為兩組測風探頭,分別測量AB與CD軸上的風速。設Vx、Vy、Vz為X、Y、Z軸上的風速,VAB、VCD為AB、CD軸上的風速,令正四面體的邊長為L。

圖3 超聲波探頭正四面體排列結構
因為O為ΔABC的中心,可得:
由上式可得:
(2)
再由:
可得:
(3)
(4)
由上述幾個公式可知:只需測量出AB與CD軸上的風速,便可以算出X、Y、Z方向的風速。當AB兩個探頭相互發射接收時,測量出順逆風時間T1、T2,再代入式(1)計算出AB方向上的風速與風向,同理可以得出CD方向上的風速與風向,再由式(2)~(4)得出X、Y、Z方向的風速。水平矢量風可由X與Y軸方向上的風速合成,垂直風等于Z軸風速。這種正四面體結構簡化了硬件電路,節約了資源和成本。
2 系統硬件設計
系統主控電路芯片采用TI公司的微控制器MSP430F149,由激勵信號產生電路、收發轉換電路、放大電路、濾波電路、A/D轉換電路等組成。MSP430F149產生PWM波,通過收發轉換電路驅動超聲波探頭工作。當接收探頭收到聲波信號后,經過放大、濾波、A/D轉換,將采集的數據傳入MSP430F149中。最后,數據經MSP430F149處理后,計算出風速與風向,將信息在液晶顯示器上顯示出來。硬件系統結構框圖如圖4所示。

圖4 超聲波測風硬件系統框圖
2.1收發轉換電路
收發轉換電路如圖5所示,采用了ADI公司生產的ADG813,它包括4個獨立可選開關。其中獨立可選開關1、4的接通(S1和D1導通,S4和D4導通)條件是相關控制輸入為邏輯高電平,單刀單擲開關2、3的接通條件是相關控制輸入為邏輯低電平。Prob1、Prob2、Prob3、Prob4分別對應A、C、B、D(ABCD為上文的正四面體)4個超聲波探頭。當MSP430F149控制Cont輸入高電平,Cont1輸入低電平時,U4芯片的開關1、4導通,產生的PWM波從Tran1、Tran2輸入,驅動超聲波探頭A、C。與此同時,由于Cont1輸入低電平,U3芯片的開關2、3導通,當B、D探頭分別接收到A、C的聲波信號時,信號通過Rece3、Rece4傳入后端整形電路。反之,當Cont輸入低電平、Cont1輸入高電平時,B、D為發射探頭,A、C為接收探頭。

圖5 收發轉換電路
2.2濾波電路
由于超聲波探頭接收到的信號只有2~3 mV,所以需要前置放大電路將接收到的信號進行放大,在放大的同時將其他部分的干擾信號濾除掉。放大電路提高了信噪比,為后級濾波電路打下了更好的基礎。
接收信號濾波電路要考慮中心頻率、帶寬、品質因數等,帶寬設置為20 kHz,中心頻率為200 kHz,帶寬增益平坦度為1 dB。濾波器可以設計成帶有增益型的,后級就可以減小放大倍數,所以本系統應用的濾波器設計成自帶增益型的,濾波出來信號仍然較小,后級需要加上放大電路。濾波電路選用的是TI公司的OPA2830芯片,采用正5 V電源供電。接收端濾波電路如圖6所示。

圖6 濾波電路原理圖
2.3A/D采集電路
MSP430F149內部具有多個A/D轉換器,通過設置MCLK和SMCKL可以改變A/D轉換器的采樣頻率,但是MSP430F149內部A/D不能同時對4路數據進行采樣。為了達到高精確的測量要求,系統采用TI公司的ADS7864。這是一個6通道同時采樣的12位A/D轉換器,它能以500 kHz的采樣率對6通道同時進行采樣。它的量化級共分4 096個,最大參考電壓與最小參考電壓相差4 V,量化單元達到了mV,精度滿足了系統的要求。通過控制HOLDA、HOLDB、HOLDC的輸入電平控制A、B、C三個A/D轉換器工作。D0~D15為16位輸出數據線,其中D15表示數據有效位,D12~D14表示輸出數據通道,D0~D11表示12位數據輸出。A0、A1、A2表示選擇輸出數據模式,A0、A1、A2接高電平,選擇讀數模式為FIFO,即先轉換的數據先讀。A/D采集電路略——編者注。
2.4液晶顯示
液晶顯示主要負責顯示系統測量的風速與風向。LCD與數碼管顯示相比,具有較高的分辨率,不僅能顯示數字和字母,還能顯示文字、圖形、圖像等。與數碼管相比,Nokia5110占用的芯片的引腳資源較少,所以很大程度上節約了芯片I/O口資源。
Nokia5110由84×48 的點陣組成,可以顯示15個漢字或30個字符,與同類的LCD相比有較高的性價比。該芯片模塊體積小,集成了驅動芯片,僅需4根I/O線即可驅動芯片工作。單片機的4個I/O口與芯片CE(片選線)、D/C(讀寫選擇線)、DIN(串行數據線)、CLK(串行時鐘線)連接時需要串連一個100 Ω的限流電阻。芯片由3 V電源供電,工作電路在200 μA 以下。液晶實物圖略——編者注。
3 系統軟件設計
系統軟件主要包括PWM波產生、數據的采集與處理、數據的顯示、串口通信、按鍵模塊等。系統軟件調試環境為IAR5.2,采用C語言進行編程開發。首先主程序對時鐘、定時器、各個I/O口進行初始化。當MSP430F149檢測到測風按鍵響應時,輸出200 kHz的PWM波驅動超聲波探頭工作。當采集到聲波信號后,把發生信號與接收信號作互相關運算,并檢測相關函數峰值算出順逆風時間T1、T2。最后,通過順逆風時間算AB與CD方向上風速并轉化為矢量風,將風速與風向在液晶屏上顯示出來,或通過串口將數據發送至上位機中保存,以便今后查詢與處理。軟件流程如圖7所示。
4 超聲波測風系統建模仿真

圖7 軟件流程圖
本文仿真采用互相關算法計算出順逆風傳播的時間,將接收信號與發射信號作互相關運算,檢測出互相關函數的最大值及對應的時間T,可算出順(逆)風傳播的延遲時間。控制單片機產生兩組脈寬不同的方波,驅動超聲波探頭產生發射信號。接收信號可以建模表示為有起伏包絡的正弦調制信號。接收與發射信號波形如圖8所示。

圖8 發射信號與接收信號波形圖
因為聲波在傳播過程中會受到風的影響,接收到的信號會產生頻移。對接收信號與發射信號作互相關運算,再檢測出函數的峰值即可計算出順(逆)風的延遲時間。互相關算法處理結果圖如圖9所示。
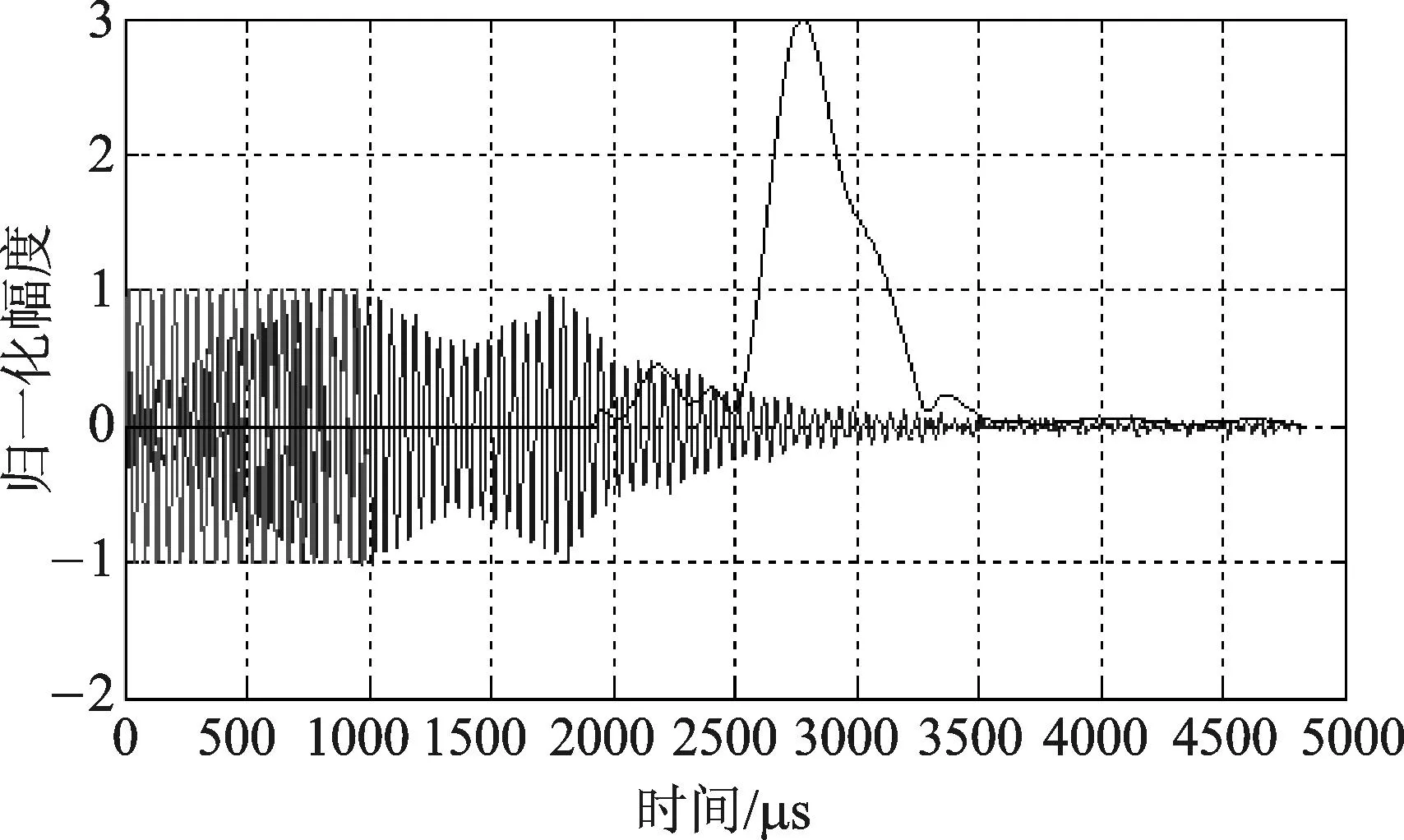
圖9 互相關算法處理結果圖
結 語
風作為重要的氣象要素,影響著農業、航空、氣象等各個領域,因此,矢量風的測量有著至關重要的意義。傳統的機械測風儀有較大的系統偏差,而超聲波測風儀能準確地對風速與風向進行時時測量。
本文采用時差法和MSP430F149單片機芯片,設計出超聲波三維測風系統。在探頭排列模型上采用了正四面體的新型結果,大大簡化了系統設計的復雜性,節省了資源。系統實現了用200 kHz方波驅動超聲波探頭,對接收到的信號進行放大、濾波、A/D轉換并計算出風速與風向。系統采用模塊化設計,硬件模塊包括電源模塊、濾波模塊、放大模塊等。這種設計思路降低了設計的復雜度,提高了系統的可靠性。
編者注:本文為期刊縮略版,全文見本刊網站www.mesnet.com.cn。
[1] 王曉蕾.兩種測風儀的動態比對試驗及分析[J].解放軍理工大學,2014,3(3).
[2] 徐立強,鄭貴林.超聲波風速風向儀的研制[J].電測與儀表, 2009,25(8):92-93.
[3] 黃曉靜.三維超聲波測風系統研究[D].成都:成都信息工程學院,2012.
[4] 曲振林.基于FPGA的超聲波測風系統的設計[D].南京:南京信息工程大學,2014.
[5] 張捷光,齊文新,齊宇.三維超聲波測風儀原理與應用[J].計算機與數字工程,2013(1).
[6] 吳宗玲,閆連山,曾德兵,等.基于脈沖寬度調制技術的超聲波測風系統研究[J].化工自動化及儀表,2012,39(9).
[7] 傅曉程,祁才君.ADS7864及其應用[J].儀表技術,2002(2).
[8] Gill Instruments .WindMaster & WindMaster Pro Ultrasonic Anemometeruser Manual ,2007.
[9] B Audoin,J Roux.An Innovative Application of Hilbert Transform to Time Delay Estimation of Overlapped Ultrasonic Echoes [J].Ultrasonics,1996(34):25-33.
[10] Daniele Marioli,Claudio Narduzzi,Carlo Offelli,et a1.Digital Time-of-Flight Measurement for Ultrasonic sensors[J].IEEE Transactions on Instrumentation and Measurement,1991,41(1).
[11] Anders Grennberg and Magnus Sandell.Estimation of Subsample Time Delay Differences in Narrowband Ultrasonic Echoes Using the Hilbert Transform [J].Ultrasonics Ferroelectrics & Frequency Control IEEE Transactions on,1994,41(5).
[12] Delta OHM.HD2003-HD2003.1 Three-Axis Ultrasonic Anemometer,2003.
鄧云逸(碩士研究生),主要研究方向為信息處理和信號處理。

Deng Yunyi,Yao Zhendong,Liu Kai,Qiu Ling,Pi Bo
(CMA. Key Laboratory of Atmospheric Sounding,Chengdu University of Information Technology,Chengdu 610225,China)
Ultrasonic level wind measurement technology has been used in the meteorological observation business for many years,which achieves good effects.The flat triangular configuration will be transformed into the tetrahedron structure,and then it forms a special structure with three-dimensional measurement capability.The design uses stepping frequency measurement technology to emit the ultrasonic frequency of 100 kHz to spread spectrum modulation.After receiving the data,the design obtaines the pulse compression,it has solved the following two problems:the lower peak transmit power's receiver sensitivity and the measuring time accuracy causing by the ultrasonic pulse.It also has the anti-jamming capability.The feasibility of this method is confirmed by the simulation and laboratory experiments.
three-dimensional vector wind;ultrasonic transducer;time difference method;tetrahedron structure
TH765
A
(責任編輯:楊迪娜2015-10-16)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21