一種應用Fx LMS算法的雙層隔振試驗裝置
2016-09-01 12:44:08高偉鵬何其偉閆政濤劉錦春
噪聲與振動控制 2016年4期
高偉鵬,何其偉,閆政濤,劉錦春
(海軍工程大學 動力工程學院,武漢 430033)
?
一種應用Fx LMS算法的雙層隔振試驗裝置
高偉鵬,何其偉,閆政濤,劉錦春
(海軍工程大學 動力工程學院,武漢 430033)
振動主動控制中次級通道的存在會對控制效果造成影響,為了減小影響,采用Fx LMS(Filter-x Least Mean Square)自適應濾波算法,通過調整步長更新濾波器參數進行自適應控制。平臺使用Compact-RIO控制器并采用Lab VIEW對其進行編程,通過設置參數對不同系統進行主動控制。控制分為三部分:參數設置、次級通道辨識、誤差信號的控制。在自適應算法的理論和仿真分析基礎上,進一步在c RIO實時控制平臺上進行實驗研究,對雙層隔振平臺采用自適應算法實現主動控制,取得理想的控制效果。
振動與波;Fx LMS算法;Compact-RIO控制器;Lab VIEW仿真;自適應控制
水下航行器的致命缺點就是其具有明顯的線譜特征,抑制振動噪聲的傳播顯得尤為重要,傳統的被動隔振對低頻振動的隔振效果很不理想[1]。振動主動控制作為抑制振源噪聲傳播的手段,近年來受到國內外專家的重視,其通過傳感器采集振動信號,使作動器產生一個與振源大小相同、方向相反的信號來抵消振動信號,對低頻線譜振動信號有較好的控制效果。由于外界激勵的時變性,需要對濾波器參數更新以確保控制效果。
在目前的振動主動控制方法中,自適應濾波算法主要有:基于維納濾波理論的方法,基于最小二乘估計的方法,基于卡爾曼濾波理論的方法,基于神經網絡理論的方法[2]。盡管這四個方法都得到了發展,但由維納濾波導出的最小均方算法(LMS算法)結構簡單,性能穩定,易于實現,應用廣泛。由于次級通道的存在,使得傳統的LMS算法不能按照負梯度最陡方向改變加權值,所以文中采用Fx LMS算法[3]。采用Fx LMS算法與Compact-RIO控制器相結合的控制平臺,在保證穩定性的前提下調整濾波器的參數,控制器采用Lab VIEW對其進行編程,完成數據采集、數據處理、系統參數辨識、控制等一系列操作,提高控制速度[4]。并在雙層隔振實驗臺架上進行仿真實驗,取得了不錯的控制效果。
1 次級通道和FXLMS算法
1.1次級通道辨識
在實際的控制系統當中,控制器輸出信號y(n)到誤差信號e(n)之間往往存在功率放大器、電纜、傳感器等儀器設備,這會使信號的幅值和相位發生變化,即誤差通道。控制系統中需要把這些考慮到算法中去,否則將會造成LMS算法中系數更新不是按照負梯度最陡下降的方向調整,嚴重的會造成控制失效。誤差通道的辨識即找出次級通道的傳遞函數S(z),分為在線辨識和離線辨識。在線辨識可以實時更新辨識參數,即次級通道傳遞函數,來進一步更新控制器參數,即橫向濾波器的權值系數,達到理想的控制效果,目前常用的在線辨識方法有在控制器輸出端疊加噪聲的誤差通道在線辨識和利用控制信號本身進行在線辨識兩種方法[5],都處于算法的理論推導和仿真階段,實用的例子比較少,缺乏可行的在線辨識算法。
文中采用離線辨識方法,利用LMS算法,以橫向濾波器為系統的未知模型,通過向控制器輸出白噪聲信號,同時將誤差傳感器的信號經過數字信號處理,更新濾波器參數,使之輸出接近參考信號,當其不能再進一步改善時,把此時橫向濾波器誤差通道的傳遞函數S(z)作為辨識參數,雖然兩者結構及參數不盡相同,但具有相同的輸出特性[6]。顯然此時誤差信號的計算公式變為


圖1 主動控制系統簡化框圖
濾波器的長度和采樣率、采樣大小和已知系統的硬件密切相關,需要針對不同的系統進行不同的參數設置,原則是必須在圖中看到類似一個脈沖響應的信號,濾波器長度要求大于此脈沖信號出現的位置點數。例如,采樣率為10 000 Hz,采樣大小為2 000時,取300比較合適,當采樣率增大時,采樣長度要適度增加但是不能過大,過大采集卡讀和寫不能同步。濾波器的步長一般設置為0.001,步長越大,收斂越快,但步長過大則不收斂。
1.2Fx LMS算法及特性分析
振動主動控制系統中,由于誤差通道的影響,控制器的輸出信號經過誤差通道傳遞給誤差傳感器。一般的LMS算法不能簡單用于控制系統中,最終的目的是使修正后的模型能夠更加接近真實的輸出特性,使通路的影響體現在自調節算法中,文中采用Filter-x LMS算法。濾波x是參考信號與誤差通道傳遞函數經過卷積而得到的濾波后的x信號,該方法即為LMS算法。它有易于實現、結構簡單等優點,對LMS推廣從而進行改進,能夠很好的應用于實際工程當中[7]。
使用Fx LMS算法的振動主動控制結構圖如圖2所示。
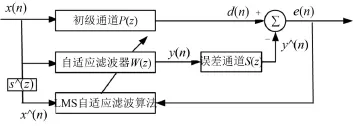
圖2 Fx LMS算法構架圖
如圖2中所示,把初級通道的傳遞特性用P(z)表示,次級通道的傳遞函數用S(z)表示,長度為L,濾波器的階數為M,設在第n個點自適應濾波器的輸出信號為y(n),文中主要采用橫向濾波器[8],其輸入矢量表達式為

n采樣點濾波器的權值向量為

誤差通道長度為L,其權向量為

其中W(z)和S(z)分別表示控制濾波器權向量w(n)和誤差通道濾波器S(n)的Z變換,則此時濾波器輸出y(n)可表示成

誤差傳感器的輸出可寫成

變化求和順序,則


權向量的更新公式為

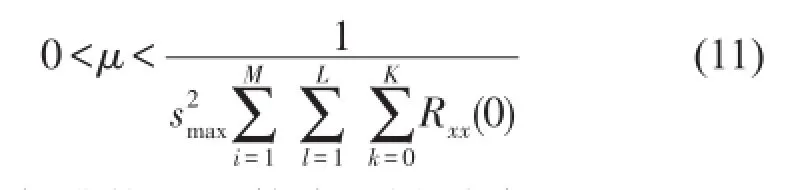
其中μ為迭代步長,μ決定了自適應濾波的收斂快慢和系統穩定性,μ的選取十分重要,提高步長可以加快收斂,提高算法的跟蹤速度。降低濾波器階數可相應地增大步長,減小計算量,但小的濾波器階數會增大穩態誤差。
信號x(n)的最大特征值不易計算,可使用以下的近似公式
如果是標準的LMS算法,則上式變成
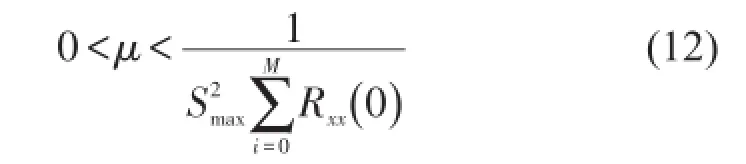
顯然,由于誤差通道的影響,濾波Fx LMS算法比標準的LMS算法收斂要慢。
2 Compact-RIO平臺實現及算法開發
Compact-RIO是工業級嵌入式測量控制系統。該Compact-RIO系統架構包含[9]:用于通信和處理的實時(Real-time)控制器(集成內部嵌入式處理器)、容納可編程硬件邏輯(FPGA)的可重新配置機箱、可熱插拔的可重配置的I/O模塊、快速實時Windows與FPGA編程的Lab VIEW軟件。控制平臺采用控制器為c RIO-9024,特點如下[10]:提供大量的可編程邏輯陣列,可滿足復雜的高速并行處理需求;FPGA直接與I/O模塊互連,進行高速的數據采集計算和控制操作,PID控制速率高達200 kHz;每通道采樣速率最高達25.6 kS/s;交流耦合(0.5 Hz)。
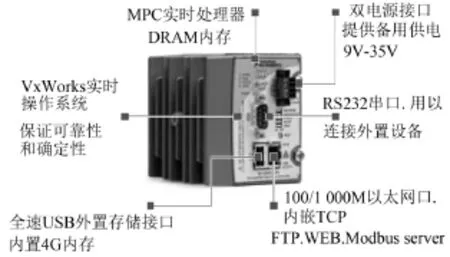
圖3 9024實時控制器
平臺進行的仿真和實驗程序均利用Lab VIEW進行編寫,采用數據流編程方式,產生框圖程序,函數庫豐富,用于數據分析和信號處理、仿真設計、振動測試,為自適應控制提供強大的支撐。自適應工具包含有簡單的算法程序,可直接調用封裝好的使用庫函數的節點,用Lab VIEW設計次級通道辨識的算法和主控制程序參數算法。
采樣率和每通道采樣大小的設置為:根據采樣定理,當采樣頻率大于信號中最高頻率的2倍時,采樣之后的數字信號才完整地保留了原始信號中的信息,文中選用采樣頻率為信號中最高頻率的5倍。采樣頻率越高,越消耗資源,運行速度變慢,在自適應濾波的過程中,采樣頻率越高,次級通道的平率響應延遲就越大,需要更長的濾波器長度[11],當濾波器長度過高時,采集卡的緩沖不夠,程序出錯。一般最高采樣頻率不超過20 000 Hz。采樣點數越多采樣時間越長,在主動控制這種實時控制系統中,每一步的迭代時間不宜太長,采樣點數的設置不應太大,一般設置為采樣率的十分之一,即10 000左右即可,既滿足要求,又不會降低控制實時性[12]。
3 仿真與實驗
采用雙層隔振實驗驗證該控制算法的可行性。與系統硬件連接實物圖與示意圖見圖4。
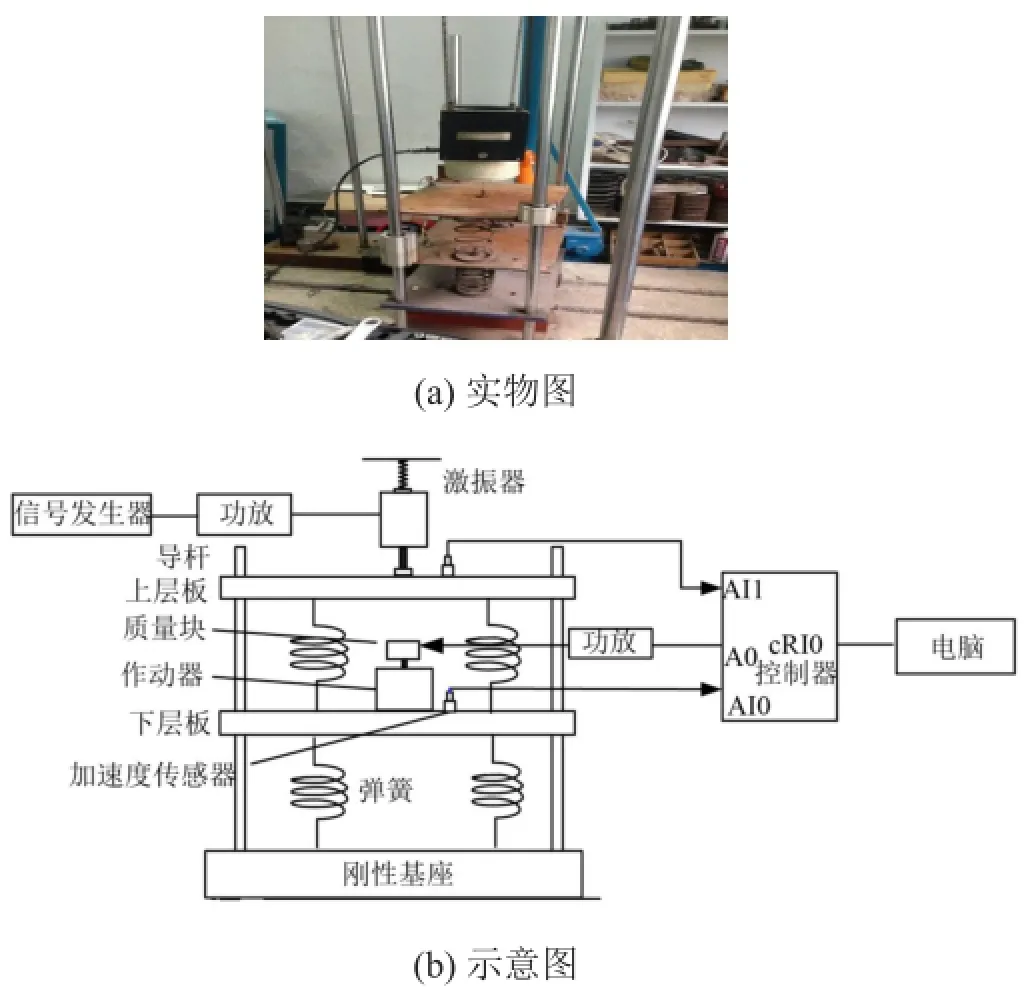
圖4 實驗裝置
以中層隔振平臺的加速度作為誤差信號與c RIO控制器的AIO接口連接,上層隔振平臺加速度激勵信號與c RIO控制器的AI1接口連接,首先進行次級通道的離線辨識,利用控制器AO向作動器輸入白噪聲信號,中層加速度傳感器信號經過數字信號處理,得到次級通道的頻率響應函數S(z),頻率響應函數在開始運行時尖峰的幅值會慢慢變大,迭代收斂之后尖峰大小基本不變化,辨識過程中濾波器長度選為300,LMS步長為0.002。步長過大可能會造成尖峰的幅值在一定范圍的波動,濾波器長度太小時,如果表面系統延遲較大,則不會出現明顯的脈沖信號,辨識可能失敗。此時可適當增加濾波器長度,最大不超過3 000,重新辨識。
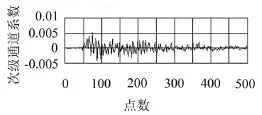
圖5 次級通道頻率響應函數
將次級通道的頻率響應函數S(z)代入主控制回路中,采樣頻率設為10 000 Hz,初始步長選為10-8,利用信號發生器發出120 Hz的正弦信號,控制前誤差信號的時域圖和功率譜如圖6和圖7所示,點開Control按鈕,一段時間后,控制算法收斂,取得明顯的控制效果。調整步長,測其控制效果。

圖6 控制前誤差信號時域圖

圖7 控制前誤差信號功率譜
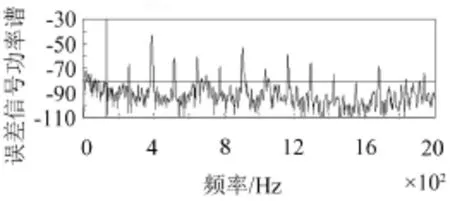
圖8 控制后誤差信號功率譜
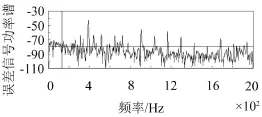
圖9 調整步長后誤差信號功率譜
4 結語
主要介紹在諧波激勵下的自適應主動控制平臺,研究收斂Fx LMS算法、Lab VIEW編程仿真、c RIO平臺主動控制實驗。首先推導單通道振動主動控制系統的Fx LMS算法的理論公式,在Lab VIEW平臺進行仿真,探討濾波因子、迭代步長、濾波器長度和誤差通道對控制性能的影響。在自適應算法的理論和仿真基礎上,采用c RIO實時控制平臺對雙層隔振系統實現自適應控制,介紹相關硬件和軟件支撐程序,為下一步的開發應用奠定基礎。
[1]張志誼,王俊芳,周建鵬.基于跟蹤濾波的自適應振動控制[J].振動與沖擊,2009,28(2):64-67.
[2]李寧.LMS自適應濾波算法的收斂性能研究與應用[D].哈爾濱:哈爾濱工程大學,2009.
[3]JAN VANUS,VITEZSLAV STYSKALA.Application of optimal settings of the LMS adaptive filter for speech signal processing[C].Proceedings of the International Multiconference on Computer Science and Information Technology,2010,(5):767-774.
[4]齊海超.基于LMS自適應濾波算法的振動主動控制仿真軟件開發及實驗研究[D].哈爾濱:哈爾濱工程大學,2012.
[5]YANG T J,GU Z Q.Active control of structural vibration with on-line secondary path modeling[J].Progress in Natural Science,2004,14(6):511-518.
[6]陳玉強.雙層隔振系統振動主動控制技術研究[D].哈爾濱:哈爾濱工程大學,2003.
[7]ALKHATIB R,LOLNARAGHI M F.Active struetural vibration control:areview[J].Shock and Vibration Digest,2003,35(5):367-383.
[8]SHIN H C,SAYED A H,SONG W J.Variable step-size NLMS and affine projection algorithms[J].IEEE Signal Processing Letters,2004,11(2):132-135.
[9]成其榮.自適應諧波振動主動控制方法及c RIO平臺實現[D].南京:南京航天航空大學,2013.
[10]羊箭峰,黃平,肖圣兵.基于Lab VIEW振動主動控制實驗仿真研究[J].實驗技術與管理,2011,28(7):92-95.
[11]周繼威.基于空間相關與自適應濾波的齒輪箱故障診斷[J].噪聲與振動控制,2014,34(6):161-165.
[12]楊理華,朱石堅,樓京俊.混合隔振系統自適應模糊滑模控制[J].噪聲與振動控制,2014,34(6):192-196.
Double-layer Vibration Isolation Experimental Equipment Based on Fx LMSAlgorithm
GAO Wei-peng,HE Qi-wei,YAN Zheng-tao,LIU Jin-chun
(College of Power Engineering,Naval University of Engineering,Wuhan 430033,China)
In active vibration control,the existence of the secondary paths may reduce the control effect.In this paper,the Filter-x Least Mean Square(Fx LMS)adaptive filtering algorithm is used to reduce the influence of the secondary paths. The adaptive control is realized by adjusting the step size for filter parameters updating.The compact-RIO(c RIO)controller is used in the platform and the Lab VIEW code is used for programing.The active control of different systems is realized by setting different parameters.This control process can be divided into three steps:setting parameters,identification of secondary paths,and control of the error signals.Based on the theory and simulation of the adaptive algorithm,the c RIO platform is used to realize the experimental research of the real-time active vibration control.The active control is realized by using the adaptive algorithm based on the double-layer vibration isolation system.And an ideal control effect is achieved.
vibration and wave;Fx LMS algorithm;compact-RIO controller;Lab VIEW simulation;adaptive control
O328
ADOI編碼:10.3969/j.issn.1006-1335.2016.04.015
1006-1355(2016)04-0070-04
2015-11-20
國家自然科學基金青年科學基金資助項目(51009143)
高偉鵬(1993-),男,河南省禹州市人,碩士生。主要研究方向為振動噪聲控制、主動控制。E-mail:791047736@qq.com
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00