混合動力挖掘機軸系扭振的主動控制仿真
2016-09-01 12:44:13張貝貝劉少軍
噪聲與振動控制 2016年4期
關鍵詞:振動
張貝貝,劉少軍,胡 瓊
(中南大學 機電工程學院,長沙 410083)
?
混合動力挖掘機軸系扭振的主動控制仿真
張貝貝,劉少軍,胡瓊
(中南大學 機電工程學院,長沙 410083)
為研究混合動力挖掘機軸系扭振并盡可能消除其影響,分析動力軸系扭振的原因,提出對軸系主動控制的方法。在三自由度系統(tǒng)Lagrange函數(shù)和耗散函數(shù)中引入電動機的氣隙磁場能,得到動力軸系和異步電機的機電耦合數(shù)學模型,建立基于AME Sim-Simulink的多動力源復雜軸系扭振仿真模型;以電機轉矩為控制變量,以液壓泵負載為干擾量,以扭振最小為控制目標,應用2階模糊PID控制分別對階躍負載和6 t混合動力挖掘機實際工況負載進行仿真計算。通過分別對比控制前后軸系轉動速度、扭振情況以及扭轉角大小,可以看到采用主動控制方式可以使軸系轉動速度密切跟蹤給定轉速曲線,同時顯著減小軸系扭轉振動,降低扭轉角的波動,快速達到穩(wěn)定狀態(tài),結果表明通過模糊PID進行主動控制可以有效地改善混合動力系統(tǒng)軸系扭振情況。
振動與波;混合動力挖掘機;動力軸系;扭轉振動;主動控制;模糊PID控制
目前國內混合動力挖掘機的研究仍處于起步階段,但在為數(shù)不多的幾個混合動力挖掘機樣機研制中都出現(xiàn)了電機斷軸現(xiàn)象,國內某大學實驗室的混合動力挖掘機試驗系統(tǒng)在進行試驗時,就曾出現(xiàn)過兩次電機斷軸現(xiàn)象,國內某企業(yè)的混合動力挖掘機樣機也因為扭振出現(xiàn)過電機斷軸現(xiàn)象。混合動力工程機械動力軸系扭振問題已經(jīng)成為混合動力工程機械發(fā)展過程中亟待解決的問題。因此,研究混合動力工程機械軸系扭振并盡可能消除其影響是非常必要的[1,2]。
在扭振控制方面,張登山等針對軋機主傳動系統(tǒng)數(shù)學模型和外部干擾存在不確定性的問題,采用H∞理論設計出魯棒扭振控制器,通過補償器增益的改變控制補償器的投入與退出,達到了減小速度目標值和反饋的偏差、保證系統(tǒng)高頻段的魯棒性以及抑制系統(tǒng)扭振的目的;黃石等基于模糊與神經(jīng)元混合控制的方法抑制軋機扭振,該方法在誤差較大的情況下采用模糊控制,加快系統(tǒng)的動態(tài)響應速度,在誤差較小的情況下采用單神經(jīng)元控制,提高了系統(tǒng)的穩(wěn)態(tài)精度,體現(xiàn)出了良好的自適應性能[3]。
混合動力挖掘機的驅動系統(tǒng)由柴油機和電動機組成,柴油機工作時曲軸受到氣缸壓力會產生周期性的高速旋轉,其他一起轉動的連接部件將會產生附加在曲軸上的慣性力,同時產生各種形式的振動,包括水平振動、垂直振動和扭轉振動[4]。由于柴油機特殊的結構和受力方式,振動的主要方式為軸系扭振,軸系扭振會引起電動機定子和轉子之間的氣隙不對稱,從而產生的不均勻電磁力會加劇動力軸系扭振;另外動力軸系的扭振將引起液壓泵回轉體的不平衡,導致由柴油機和液壓泵同軸度誤差引起的周期性不平衡力加大,該不平衡力又會反過來造成動力軸系的扭振,當作用于動力軸系的沖擊激勵過大時會對其造成直接破壞甚至使其失效,而當作用于軸系的激勵頻率與某一諧振頻率相近或相同時就會發(fā)生共振,后果不堪設想[5]。
相比于柴油機和液壓泵而言,電動機的控制響應快,易于實現(xiàn),成本低,并且電動機的轉矩和轉速直接對應負載大幅度高頻率變化引起的軸系扭振響應和柴油機轉速。因此,文中在分析軸系扭振主動控制機理的基礎上建立基于AME Sim-Simulink的多動力源復雜軸系扭振系統(tǒng)模型。以電機轉矩為控制變量,以液壓泵負載為干擾量,以扭振幅度最小為目標,應用模糊PID控制分別對階躍負載和挖掘機實際工況負載進行軸系扭振主動控制的仿真研究。對比應用主動控制前后軸系扭振幅度和扭轉角大小,驗證主動控制效果[6]。
1 混合動力裝置結構
混合動力挖掘機的核心部分就是動力系統(tǒng),主要包括柴油機、電動機、液壓泵、蓄電池、控制器[7]。根據(jù)柴油機和電動機連接方式混合動力系統(tǒng)可分為串聯(lián)結構、并聯(lián)結構和混聯(lián)結構。現(xiàn)有研究表明,并聯(lián)結構的混合動力系統(tǒng)較適合挖掘機。并聯(lián)式混合動力系統(tǒng)結構如圖1所示。
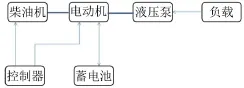
圖1 并聯(lián)式混合動力結構圖
并聯(lián)式混合動力系統(tǒng)由柴油機、電動機和液壓泵共軸連接,電動機采用雙軸輸出的三相異步電機。采用液壓站加載系統(tǒng)模擬液壓泵實際負載,通過調節(jié)溢流閥的工作壓力改變加在系統(tǒng)上的輸出功率,通過電子油門控制轉速,電動機由變頻器控制實現(xiàn)轉矩輸出,柴油機與電動機之間、電動機與液壓泵之間通過聯(lián)軸器連接[8-9]。
2 數(shù)學模型
混合動力挖掘機動力軸系是由柴油機、聯(lián)軸器、電動機、液壓泵、傳感器等組成的復雜系統(tǒng)。在研究軸系扭振情況時,可以將軸系看作是一個由慣性元件(柴油機、電動機、液壓泵等)和彈性元件(聯(lián)軸器等)組成的“質量-彈性系統(tǒng)”。于是動力軸系可以簡化為三自由度動力學模型[10],如圖2所示。
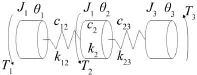
圖2三自由度動力學模型
圖2所示三自由度系統(tǒng)動能為


混合動力系統(tǒng)的Lagrange函數(shù)L和耗散函數(shù)F分別為
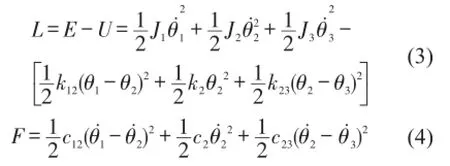
勢能為
系統(tǒng)的廣義力矩為

其中Mii為廣義外力矩,q(jj =1,2,3)為廣義坐標,將式(3)~式(5)代入到含耗散項的Lagrange方程
得到多動力源三自由度系統(tǒng)的模型為

將異步電機電磁能引入至上述建立的混合動力系統(tǒng)軸系扭振動力學模型中,與傳動系統(tǒng)共同構成系統(tǒng)的機電耦合模型,由電磁場理論可以得到異步電機的氣隙磁場能為
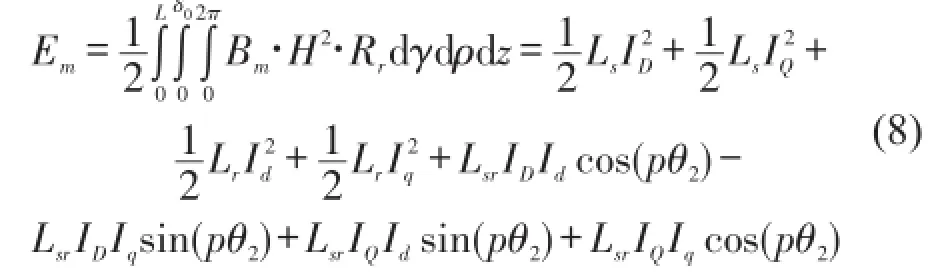
其中L為異步電機鐵芯的有效長度,δ0為定轉子之間的氣隙,γ為電機氣隙圓周角,Bm為磁感應強度,H為磁場強度,p為電機極對數(shù),θ2為轉子轉動的角度,Ls為定子電感,Lr為轉子電感,Lsr為定轉子互感,ID為定子D軸電流,IQ為定子Q軸電流,Id為轉子D軸電流,Iq為轉子Q軸電流。
混合動力系統(tǒng)包含電動機磁場的Lagrange函數(shù)L和耗散函數(shù)F分別為

其中Rs為定子電阻,Rr為轉子電阻。
將式(9)和式(10)代入Lagrange-Maxwell方程
得到的多動力源傳動系統(tǒng)機電耦合的周期系數(shù)微分方程為

3 模糊控制算法
3.1模糊控制器的設計
模糊控制器是一種模擬人類控制特征的語言控制器,主要包括結構選擇、控制規(guī)則定義、模糊化和反模糊化確定、輸入、輸出變量論域的選取[11-12]。文中采用目前廣泛使用的二維模糊控制器,以系統(tǒng)誤差E和誤差變化率EC為輸入變量,其流程如圖3所示。
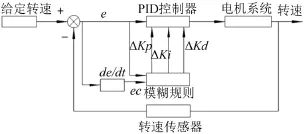
圖3 模糊PID控制器的結構
3.2隸屬函數(shù)的建立
隸屬函數(shù)是描述具有漸變性事物的關鍵,它是模糊控制的重要環(huán)節(jié)。變量所取的隸屬函數(shù)一般是對稱和平衡的,且是凸模糊集合。經(jīng)過反復試驗,輸入變量和輸出變量的模糊子集均取為7個。e、ec、kp、ki、kd對應的模糊變量分別是E、EC、Kp、Ki、Kd。模糊狀態(tài)的選擇如下:
每個模糊變量在其論域內可分成7個等級。
隸屬函數(shù)是用于表征模糊集合的數(shù)學工具,常用的有三角形、高斯型和鐘形。隸屬函數(shù)的形狀對控制器的性能影響很大,隸屬函數(shù)比較瘦窄,則控制靈敏;若隸屬函數(shù)比較寬胖,則系統(tǒng)穩(wěn)定性好。文中輸入和輸出變量的模糊子集均取為7個,隸屬函數(shù)的兩側采用高斯函數(shù),中間采用三角函數(shù)。
3.3模糊控制規(guī)則的建立
模糊控制規(guī)則基于人工經(jīng)驗,利用模糊集合理論和語言變量的概念,采用計算機進行控制。控制規(guī)則的設計包括選擇輸入、輸出變量的子集、定義模糊變量的子集和建立模糊控制規(guī)則三部分。根據(jù)PID參數(shù)整定的基本經(jīng)驗,制定相應的控制規(guī)則,Kp、Ki、Kd的模糊規(guī)則表分別如表1至表3所示。
4 仿真計算
根據(jù)上述動力軸系和異步電機耦合的數(shù)學模型,建立基于AME Sim-Simulink的多動力源復雜軸系扭振系統(tǒng)聯(lián)合仿真模型[13]如圖4所示,其中電機力矩通過齒輪傳遞,與同軸連接效果完全相同。以電機轉矩為控制變量,以液壓泵負載為干擾量,以扭振幅度最小為控制目標,應用模糊PID控制,進行仿真研究。
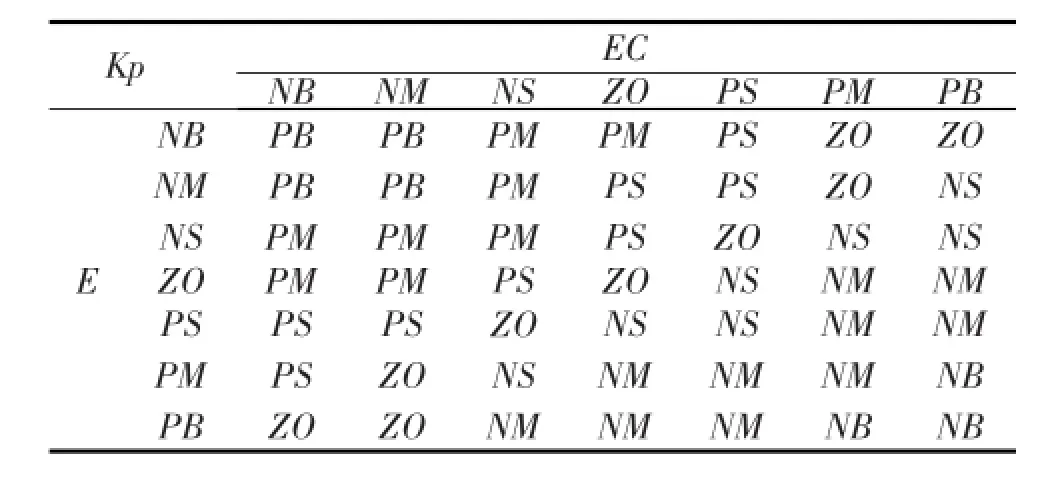
表1 比例系數(shù)Kp的模糊規(guī)則表
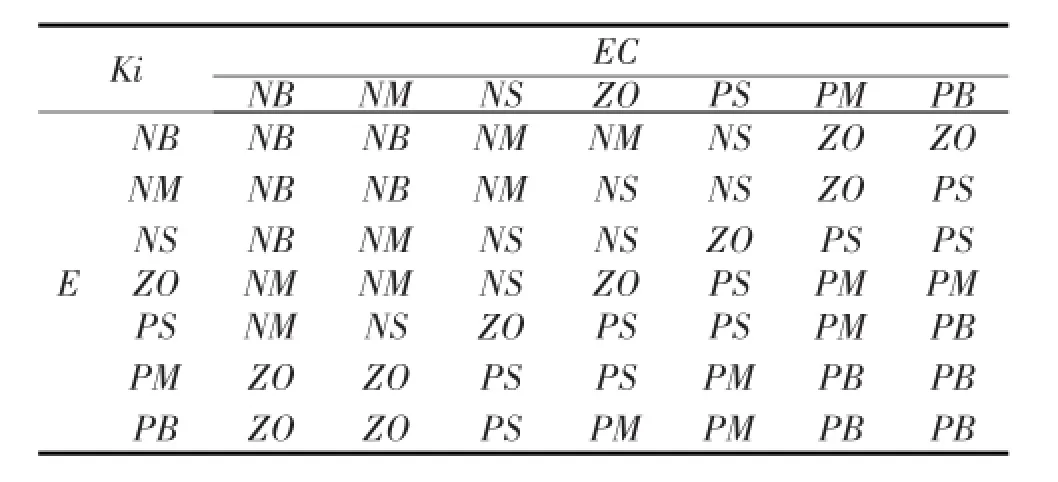
表2 積分系數(shù)Ki的模糊規(guī)則表
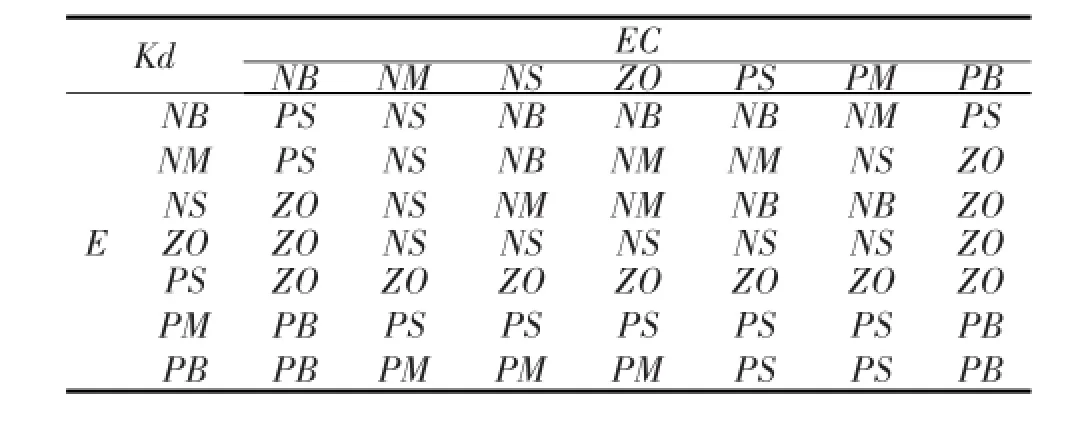
表3 微分系數(shù)Kd的模糊規(guī)則表
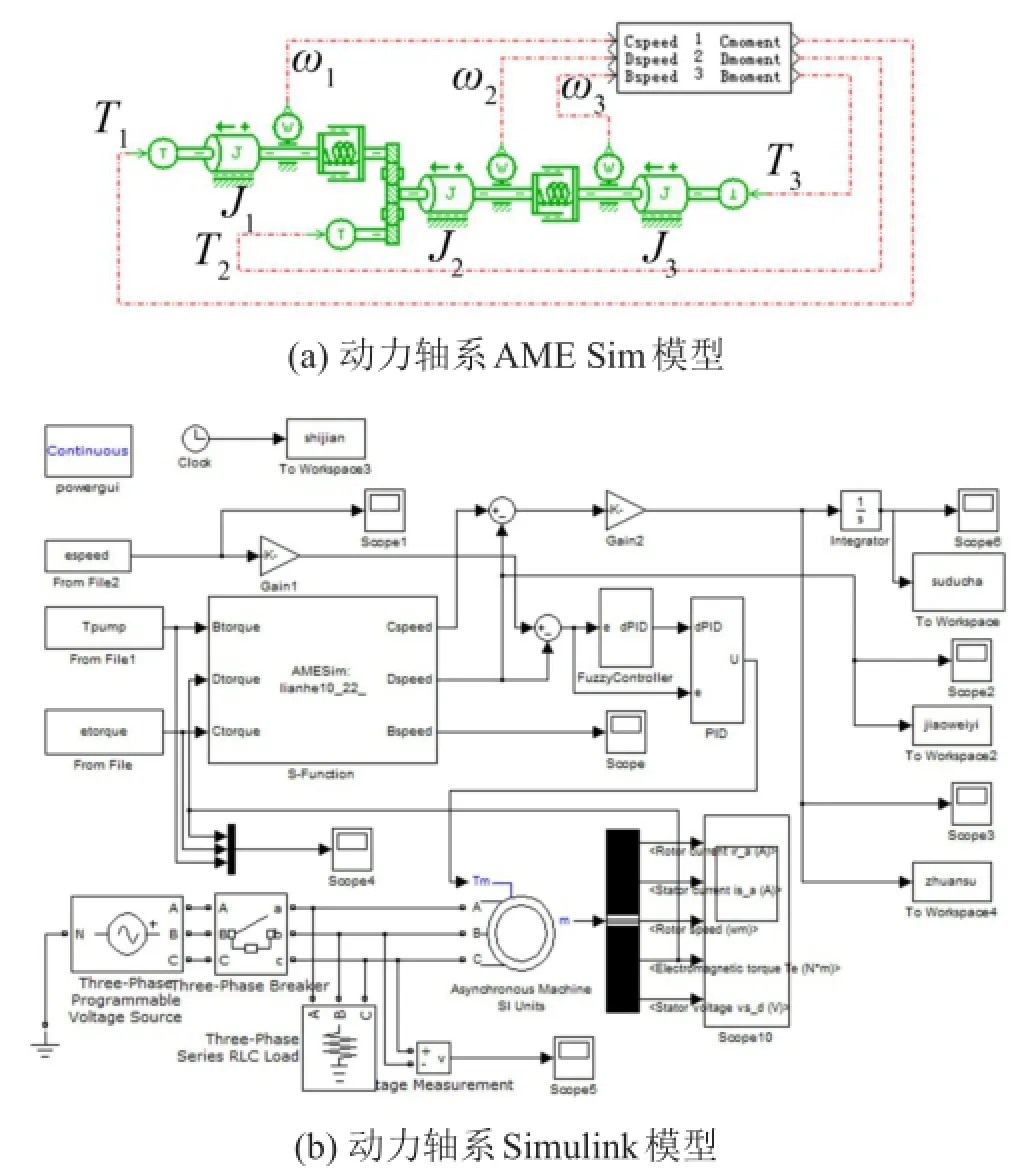
圖4多動力源復雜軸系扭振系統(tǒng)聯(lián)合仿真模型
圖4(a)中J1、J2、J3分別為柴油機、電動機、液壓泵轉動慣量;ω1、ω2、ω3分別為柴油機、電動機、液壓泵軸系轉速;T1、T2、T3分別為柴油機、電動機、液壓泵力矩。圖4(b)中Cspeed、Dspeed、Bspeed分別為柴油機、電動機、液壓泵轉速;Cmoment、Dmoment、Bmoment分別為柴油機、電動機、液壓泵力矩;espeed為給定轉速。異步電機模型主要模塊包括:三相異步電機、三相斷路器、三相交流電壓源、三相串聯(lián)負載、接地模塊、電壓模塊。電機基本參數(shù)如下:功率為15 kw;工作電壓為380 V;工作頻率為50 Hz;Ls=0.020 3 H;Lr=0.019 7 H;Lm=0.018 9 H;Rs=0.081 0 Ω;Rr=0.055 Ω;np=2。
在過渡工況下,動力軸系負載大幅變化,電機也隨之不斷調整工作狀態(tài):負載較大時電機處于電動狀態(tài),負載較小時處于發(fā)電狀態(tài)。根據(jù)負載的不同,柴油機在若干個經(jīng)濟點工作。工程機械在過渡工況下時,動力軸系扭振問題較為嚴重,因此,分別對階躍負載和6 t混合動力挖掘機實際負載進行了聯(lián)合仿真。
4.1階躍信號響應分析
階躍仿真參數(shù)設置:液壓泵負載0 s時由0階躍為100Nm,柴油機輸出力矩為50 N?m;軸系轉速為1 500r/ min,仿真時間為3 s。對比不進行控制和模糊PID控制時動力軸系扭振(角速度差)情況和扭轉角(角位移)大小,圖5為控制前后軸系扭振情況,圖6為控制前后軸系扭轉角大小。

圖5 階躍負載軸系扭振
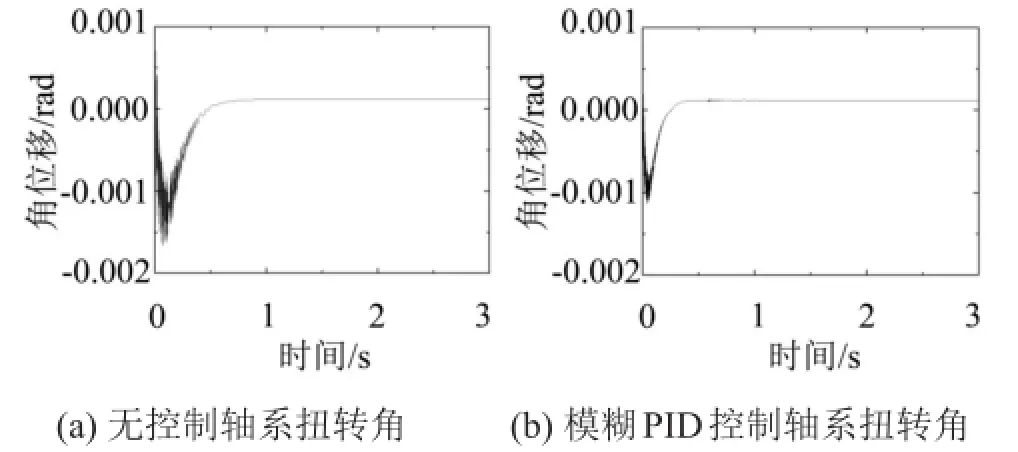
圖6 階躍負載軸系扭轉角
由圖5和圖6可以看出,對軸系進行主動控制前,角速度差在-0.8rad/s~0.8rad/s之間波動,角位移在-0.001 7rad/s~0.001rad之間波動,0.8 s時基本達到穩(wěn)定狀態(tài);控制后角速度差波動范圍降至-0.4rad/s~0.4rad/s,角位移在-0.001 3rad~0.000 5rad范圍內波動,0.25 s即穩(wěn)定。在負載階躍變化情況下,對混合動力挖掘機動力軸系進行模糊PID控制,有效降低了軸系扭振幅度及其扭轉角。
4.2實際工況負載仿真
基于圖4所示的AME Sim-Simulink仿真模型,以6 t混合動力挖掘機實際工況參數(shù)作為輸入,展開仿真研究。圖7為各系統(tǒng)力矩,0~100 s為重載工況,柴油機提供液壓泵所需的平均力矩,電機隨負載轉矩波動;100 s~150 s為平整工況,柴油機處于待機狀態(tài),液壓泵所需力矩由電動機提供,持續(xù)兩個周期。
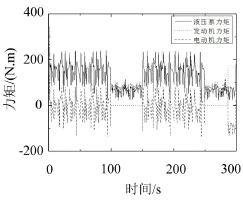
圖7 各系統(tǒng)力矩
未對電動機進行控制時的電動機輸出力矩如圖7中的發(fā)動機力矩曲線所示,主動控制下的電動機輸出力矩與原力矩基本吻合,但略超前于未進行控制時的輸出力矩,其對比圖如圖8所示。
對比實際工況下動力軸系扭振情況及模糊PID控制后的效果。圖9為控制前后軸系轉速曲線,圖10為控制前后軸系扭振情況。

圖8 電動機輸出力矩
對軸系扭振積分即得到動力軸系扭轉角實時大小,圖11為控制前后軸系扭轉角大小。
由圖9可以看出,未進行控制時,軸系轉速受負載影響在給定曲線附近波動,不穩(wěn)定,采用模糊PID控制后,軸系速度密切跟蹤給定速度曲線。由圖10和圖11可以看出,對軸系進行主動控制前,軸系角速度差在-0.6rad/s~0.6rad/s范圍內波動,扭轉角在-0.001rad~0.001rad范圍內波動,工況改變時軸系角速度差和角位移波動范圍分別為0.3rad/s和0.04rad,響應時間為20 s左右;控制后角速度差波動降至-0.15rad/s~0.15rad/s,穩(wěn)定后波動范圍極小,工況改變時,角速度差和角位移波動范圍分別為0.15rad/s和0.000 1rad,響應時間極短,跟隨狀況好。
5 結語
(1)提出了一種適合混合動力挖掘機軸系扭振的主動控制方法,建立了基于AME Sim-Simulink的多動力源復雜軸系扭振系統(tǒng)聯(lián)合仿真模型。
(2)對階躍負載和6t混合動力挖掘機實際工況負載進行仿真研究,對比了主動控制前后動力軸系扭振情況及其扭轉角大小,結果表明:模糊PID控制大幅降低了軸系扭振幅度及其扭轉角,提出的軸系扭振主動控制方法是正確可行的。
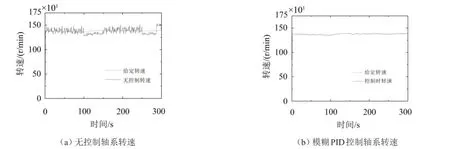
圖9 實際工況軸系轉速
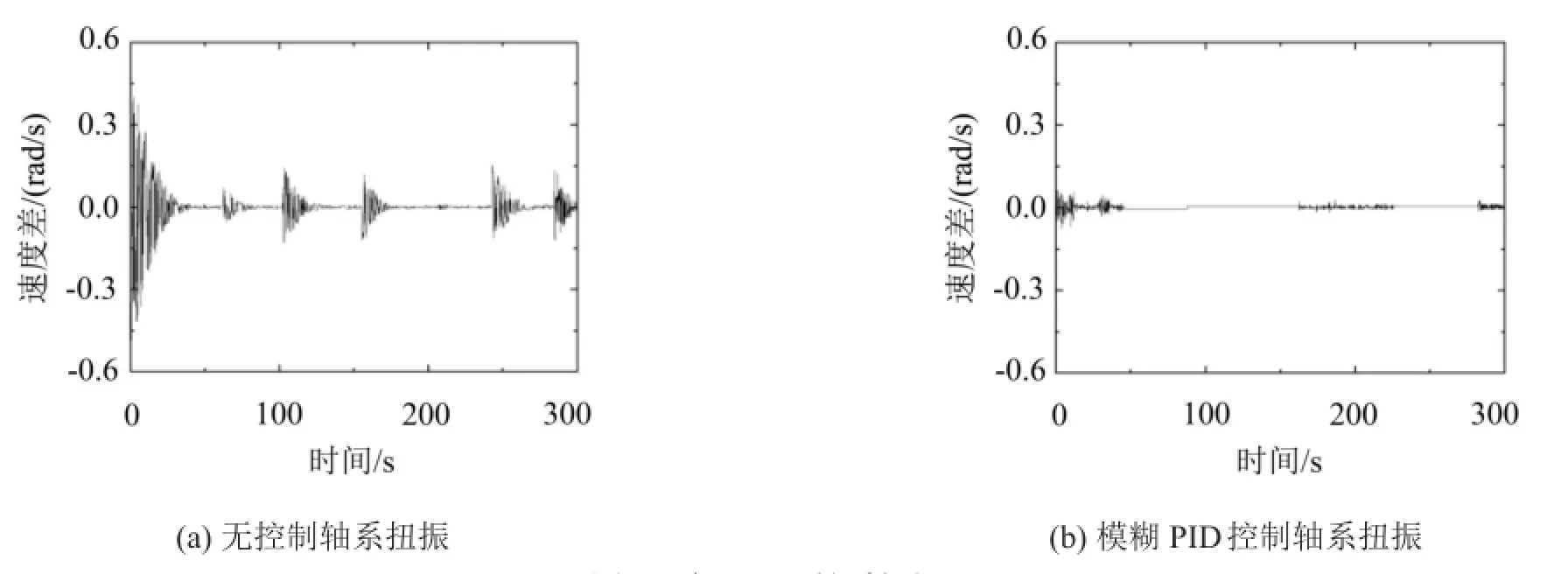
圖10 實際工況軸系扭振
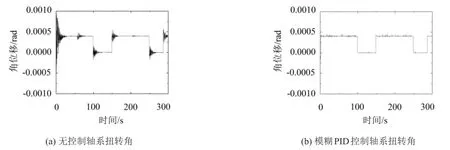
圖11 實際工況軸系扭轉角
[1]岳東鵬,苗德華,張峻霞.機電耦合作用下混合動力系統(tǒng)軸系動力學分析[J].汽車工程,2008,30(3):211-214.
[2]VUL FSON I I,PREOBRAZHENSKAYA M V.Excitation of bending and torsional vibrations in multisectional drives of cyclic machines[J].Journal of Machinery Manufacture and Reliability,2010,39(2):111-117.
[3]黃石,廖勇,許如琴,等.模糊單神經(jīng)元混合控制的軋機扭振抑制研究[J].電氣傳動,2008,38(11):3-7.
[4]ZUO JIN-YU,LIU SHAO-JUN,HUANG ZHONG-HUA,et al.Simulation analysis of the vibration characteristics of the parallel hybrid shaft system[J].Applied Mechanics and Materials,2012(190):825-831.
[5]任麗麗,施善,劉友波.動力傳動系統(tǒng)扭轉振動的分析及控制[J].噪聲與振動控制,2014,34(3):20-25.
[6]HU QIONG,YANG CHUN-HUA,LIU SHAO-JUN,et al. Torsional vibration active control of hybrid construction machinerycomplexshafting[J].JournalofCentral South University of Technology,2014,21:3498-3503.
[7]熊建強,黃菊花.混合動力汽車噪聲和振動的分析與控制[J].噪聲與振動控制,2009,29(2):96-100.
[8]HU QIONG,LIU SHAO-JUN,HUANG ZHONG-HUA,et al.Control system of electro-mechanical coupling dynamics test-bed of construction machinery hybrid power system[J].Journal of Electrical Systems,2012,8(2): 178-184.
[9]LIU ZHI,LIU SHAO-JUN,HUANG ZHONG-HUA,et al.Hydraulic excavator hybrid power system parameters design[C].2011 International Conference on Digital Manufacturing&Automation,Zhangjiajie,Hunan,2011:602-605.
[10]王東,閆兵,王東亮,等.汽車傳動系扭振引起的車內轟鳴聲控制方法[J].噪聲與振動控制,2015,35(2):73-76.
[11]王威,薛彥冰,宋玉玲,等.基于GA優(yōu)化控制規(guī)則的汽車主動懸架模糊PID控制[J].振動與沖擊,2012,31(22):157-162.
[12]胡均平,鄭聰,李軍科,等.精密機床的模糊PID主動隔振系統(tǒng)研究[J].噪聲與振動控制,2015,35(4):193-197.
[13]任麗莉,康冰,閆冬梅.基于AMESim-simulink仿真對混合動力汽車感應電機控制系統(tǒng)性能的研究[J].長春師范學院學報(自然科學版),2011,30(1):43-46.
Active Control Simulation for Torsional Vibration of a Hybrid Excavator Shafting System
ZHANG Bei-bei,LIU Shao-jun,HUQiong
(School of Mechanical and Electrical Engineering,Central South University,Changsha 410083,China)
Torsional vibrations of the shafting system of hybrid excavators often have some poor effects.In this paper,the reasons of torsional vibration of electromechanical couplings are analyzed and a method of active control of shafting systems is put forward.Mathematical model of a power shafting system is studied.On this basis,torsional vibration of a complex multi-power sourced shafting system is modeled by AMESim-Simulink.Simulation of the shafting system under step load and actual operating load of a 6 t hybrid excavator is conducted by employing the fuzzy PID control with the torques of the motor as the control variable,the torques of the hydraulic pump as the disturbance variable,and the motor speed as the control objective.Rotational velocity,torsional conditions and torsional angles of the shafting system before and after the control are compared.Results show that through the method of active control,the rotational velocity of the shafting system can closely follow the given rotational speed curve,and the torsional vibration of the shafting and the fluctuation of the torsional angle can be significantly reduced,which means that the torsional vibration of the shafting of the hybrid power system can be effectively improved through the active control by employing fuzzy PID.
vibration and wave;hybrid excavator;power shafting system;torsional vibration,active control;fuzzy PID control
TH113.1
ADOI編碼:10.3969/j.issn.1006-1335.2016.04.021
1006-1355(2016)04-0097-06
2016-01-19
國家自然科學基金青年資助項目(51205415);湖南省自然科學基金資助項目(14JJ3020);湖南省高校科技創(chuàng)新團隊支持計劃資助項目(湘教通〔2014〕207號)
張貝貝(1990-),男,山東省濟寧市人,碩士研究生,研究方向為混合動力軸系扭振及其主動控制。
劉少軍,男,教授,博士生導師。E-mail:jdgcxy@csu.edu.cn
通訊作者:胡瓊(1981-),女,副教授,碩士生導師。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學物理學報(2018年4期)2018-09-14 03:40:58
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00