自航模運(yùn)行軌跡自動(dòng)跟蹤系統(tǒng)研究
2016-09-09 01:32:06冒如權(quán)海軍駐上海地區(qū)艦艇設(shè)計(jì)研究軍事代表室上海200011
船舶 2016年4期
關(guān)鍵詞:系統(tǒng)
冒如權(quán)(海軍駐上海地區(qū)艦艇設(shè)計(jì)研究軍事代表室 上海200011)
自航模運(yùn)行軌跡自動(dòng)跟蹤系統(tǒng)研究
冒如權(quán)
(海軍駐上海地區(qū)艦艇設(shè)計(jì)研究軍事代表室 上海200011)
通過(guò)對(duì)自航模運(yùn)行特點(diǎn)的研究,研制出一套利用伺服系統(tǒng)驅(qū)動(dòng)的單臺(tái)攝像機(jī)自動(dòng)跟蹤系統(tǒng),主要由水平旋轉(zhuǎn)伺服系統(tǒng)、垂直旋轉(zhuǎn)伺服系統(tǒng)和安裝在伺服系統(tǒng)之上的工業(yè)相機(jī)組成。系統(tǒng)對(duì)圖像進(jìn)行采集和處理,并與伺服系統(tǒng)形成閉環(huán)。當(dāng)船模成像到達(dá)圖像正中心后,采集當(dāng)前水平與垂直伺服系統(tǒng)的角度,計(jì)算當(dāng)前船模坐標(biāo),并與上一坐標(biāo)點(diǎn)進(jìn)行關(guān)聯(lián),繪制運(yùn)行路徑。通過(guò)實(shí)際測(cè)試,該系統(tǒng)運(yùn)行穩(wěn)定,軌跡定位精度滿足工程要求。
自航模;軌跡;跟蹤系統(tǒng);伺服務(wù)器;圖像處理
引 言
在自航模試驗(yàn)中,自航模運(yùn)動(dòng)軌跡的準(zhǔn)確獲取對(duì)驗(yàn)證自航模的操縱性至關(guān)重要。傳統(tǒng)方法是人工光學(xué)跟蹤,即人工操縱望遠(yuǎn)鏡,在自航模航行過(guò)程中,使自航模始終位于望遠(yuǎn)鏡的中心,通過(guò)機(jī)械或電氣記錄望遠(yuǎn)鏡的調(diào)節(jié)過(guò)程參數(shù),進(jìn)而推算出自航模。此法優(yōu)點(diǎn)是結(jié)構(gòu)簡(jiǎn)單、造價(jià)低廉。但由于是依靠人的感官來(lái)判斷和操縱,人從視覺(jué)獲取到大腦判斷,然后再操縱跟蹤設(shè)備,延時(shí)約1 ~ 2 s,會(huì)產(chǎn)生精度、實(shí)時(shí)性、可靠性等多方面的問(wèn)題。
近年來(lái),隨著機(jī)器視覺(jué)的發(fā)展,利用圖像識(shí)別技術(shù)的自航運(yùn)行軌跡跟蹤系統(tǒng)也常被應(yīng)用。該系統(tǒng)采用多臺(tái)攝像機(jī)覆蓋試驗(yàn)區(qū)域,對(duì)實(shí)驗(yàn)的過(guò)程實(shí)時(shí)錄像,并且通過(guò)圖像識(shí)別技術(shù)識(shí)別各個(gè)時(shí)刻船模的位置,然后對(duì)其位置進(jìn)行坐標(biāo)計(jì)算,最后對(duì)各個(gè)坐標(biāo)位置按先后順序進(jìn)行連接,從而繪制出自航模運(yùn)行軌跡。這種方法由于采用高分辨率攝像機(jī)進(jìn)行圖像采集,所以實(shí)時(shí)性好、精度高,整個(gè)處理過(guò)程不會(huì)超過(guò)0.1 s,定位精度可以達(dá)到毫米級(jí),能夠完全滿足自航模試驗(yàn)需求。不過(guò)該系統(tǒng)需要部署大量的視覺(jué)設(shè)備和計(jì)算設(shè)備,不僅復(fù)雜且造價(jià)高[1-3]。
通過(guò)對(duì)以上兩種方式的分析,我們綜合其優(yōu)點(diǎn)、克服其缺點(diǎn),研制出一套利用伺服系統(tǒng)驅(qū)動(dòng)單臺(tái)攝像機(jī)自動(dòng)跟蹤系統(tǒng)[4-5],以結(jié)構(gòu)簡(jiǎn)單、造價(jià)低廉的方式實(shí)現(xiàn)高精度軌跡快速定位。
1 系統(tǒng)結(jié)構(gòu)及工作原理
1.1 系統(tǒng)結(jié)構(gòu)
該自動(dòng)跟蹤系統(tǒng)整體結(jié)構(gòu)如圖1所示。
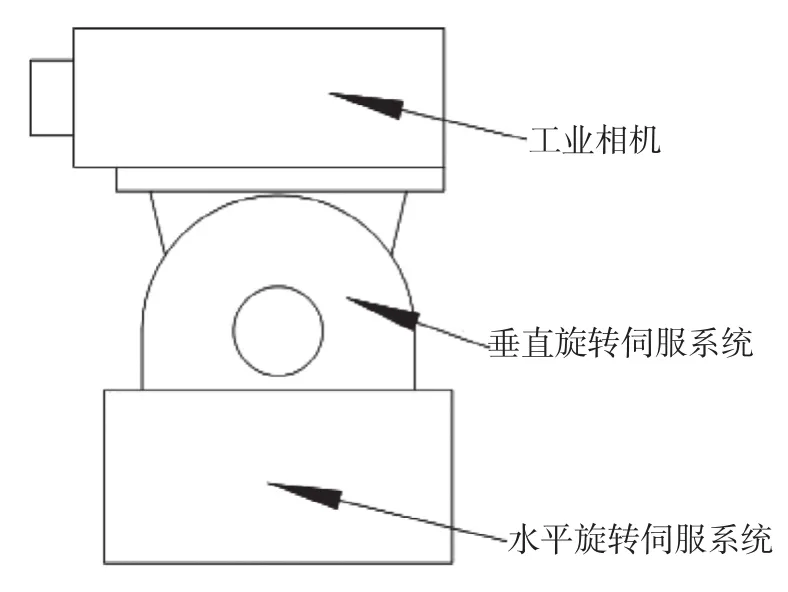
圖1 系統(tǒng)整體結(jié)構(gòu)
其由以下三部分組成:
(1)水平旋轉(zhuǎn)伺服系統(tǒng);
(2)垂直旋轉(zhuǎn)伺服系統(tǒng);
(3)安裝在伺服系統(tǒng)之上的工業(yè)相機(jī)。
水平旋轉(zhuǎn)伺服系統(tǒng)是在伺服電機(jī)驅(qū)動(dòng)下的一個(gè)旋轉(zhuǎn)平臺(tái),可以水平面360°旋轉(zhuǎn),并可以實(shí)時(shí)返回目前的準(zhǔn)確角度,其作用是帶動(dòng)相機(jī)左右轉(zhuǎn)動(dòng)。
垂直旋轉(zhuǎn)伺服系統(tǒng)是在伺服電機(jī)驅(qū)動(dòng)下的一個(gè)旋轉(zhuǎn)平臺(tái),可以在垂直方向120°旋轉(zhuǎn),并可以實(shí)時(shí)返回目前的準(zhǔn)確角度,其作用是帶動(dòng)相機(jī)上下轉(zhuǎn)動(dòng)。工業(yè)相機(jī)負(fù)責(zé)捕獲自航模的圖像采集系統(tǒng)。
1.2 系統(tǒng)工作原理
系統(tǒng)工作原理見(jiàn)圖2。如圖2(a)所示,相機(jī)安裝在岸基,其高度為h。系統(tǒng)自動(dòng)調(diào)節(jié)相機(jī),讓船模成像處于圖像的中心,此時(shí),相機(jī)、船模、相機(jī)在水平面投影成三角關(guān)系。由于相機(jī)高度固定為h,通過(guò)垂直伺服系統(tǒng)可得角度α。此時(shí)船模距相機(jī)的距離x為:x = h·tgα。
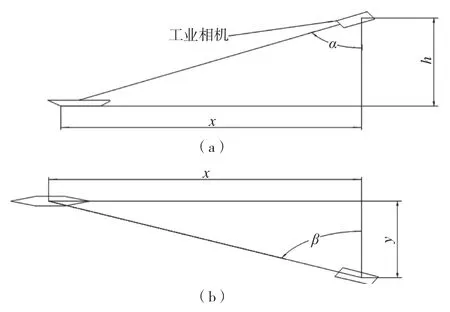
圖2 系統(tǒng)工作原理
如圖2(b)所示,x已經(jīng)計(jì)算得出,通過(guò)水平伺服系統(tǒng)可以得到角度β。此時(shí)船模距相機(jī)的距離y為:y = x / tg β。
1.3 系統(tǒng)工作流程
系統(tǒng)工作流程分為兩部分:一部分是圖像采集和處理并與伺服系統(tǒng)形成閉環(huán),調(diào)節(jié)船模成像到圖像的正中心;另一部分是當(dāng)船模成像到達(dá)圖像正中心后,采集當(dāng)前水平與垂直伺服系統(tǒng)的角度,計(jì)算當(dāng)前船模坐標(biāo)并與上一坐標(biāo)點(diǎn)進(jìn)行關(guān)聯(lián),繪制運(yùn)行路徑。系統(tǒng)工作流程如下頁(yè)圖3所示。

圖3 系統(tǒng)工作流程圖
2 系統(tǒng)研制關(guān)鍵技術(shù)
2.1 圖像獲取技術(shù)
由于自航模呈不規(guī)則形狀,并且光學(xué)環(huán)境較為復(fù)雜,如果直接使用可見(jiàn)光成像,那么對(duì)于在所拍攝圖像中的自航模較難識(shí)別,并且結(jié)果不穩(wěn)定。為了解決這個(gè)問(wèn)題,我們采用紅外成像方法,即在自航模上中心位置安裝近紅外信號(hào)燈(近紅外LED),然后采用在近紅外波段響應(yīng)比較靈敏的CMOS相機(jī),并且在相機(jī)鏡頭上安裝可見(jiàn)光濾波片,將900 nm以下的光全部截至,這樣最終成像為黑色背景上的一個(gè)亮斑(近紅外信號(hào)燈成的像)。這樣的畫(huà)面,對(duì)圖像處理較為容易,并且穩(wěn)定性較好[6]。
在本系統(tǒng)中,采用的相機(jī)光譜響應(yīng)曲線如圖4所示。 由于該相機(jī)在近紅外波段響應(yīng)率很高,并且當(dāng)其數(shù)據(jù)傳輸采用USB 3.0、曝光時(shí)間設(shè)置為10 ms、幀率約為100 Hz時(shí),圖像質(zhì)量及傳輸均達(dá)到要求。
2.2 圖像處理技術(shù)
圖像處理的目的是在圖像中識(shí)別出自航模,并且計(jì)算出其在畫(huà)面中的坐標(biāo)位置。通過(guò)2.1節(jié)的處理,識(shí)別過(guò)程簡(jiǎn)化成在黑色背景下尋找一個(gè)發(fā)光斑點(diǎn),其算法大為簡(jiǎn)化:首先,通過(guò)高斯濾波算法對(duì)畫(huà)面進(jìn)行濾波,消除干擾信號(hào);其次,對(duì)畫(huà)面進(jìn)行二值化,即通過(guò)閾值分割將畫(huà)面上所有的像素值全部調(diào)整成黑或白色;然后,通過(guò)canny算子對(duì)畫(huà)面進(jìn)行輪廓查找,找到的輪廓,即是自航模上的信號(hào)燈的像,代表自航模的位置;最后,計(jì)算輪廓坐標(biāo)位置。
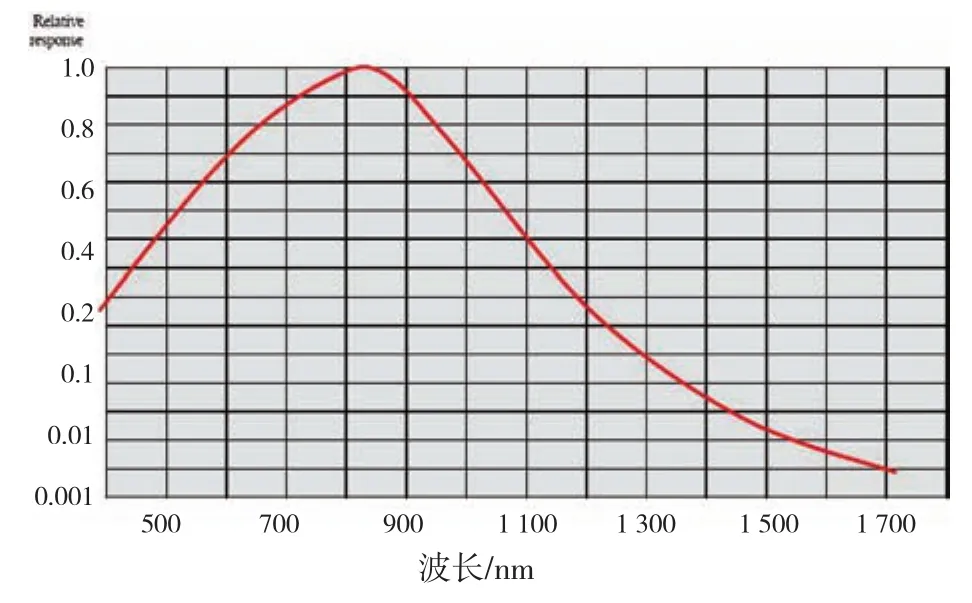
圖4 相機(jī)的光譜響應(yīng)曲線
本項(xiàng)目中,高斯濾波的卷積核大小參數(shù)為5,canny算子檢測(cè)的閾值1為80,閾值2為200。
2.3 自航模軌跡繪制
通過(guò)2.2 節(jié)的處理,我們獲得一個(gè)自航模在畫(huà)面中的坐標(biāo)位置。我們知道,在球面透鏡中,只有通過(guò)光軸的光是直線傳輸?shù)模幢仨氉屪院侥3上裨诋?huà)面正中心,才能保證相機(jī)瞄準(zhǔn)了自航模,才能使用2.2節(jié)的算法來(lái)計(jì)算其位置。因此,當(dāng)?shù)玫阶院侥W鴺?biāo)后,我們首先要判斷此坐標(biāo)在不在畫(huà)面正中心。如果在正中心,則表示已經(jīng)瞄準(zhǔn),那么就將目前的坐標(biāo)移至下一步進(jìn)行軌跡計(jì)算;如果不在正中心,則需要調(diào)整水平伺服系統(tǒng)和垂直伺服系統(tǒng),使坐標(biāo)到達(dá)畫(huà)面正中心。
伺服的調(diào)整算法,采用模糊控制算法(即比例算法)。模糊控制是相對(duì)于精確控制的概念。其提出的背景是影響系統(tǒng)執(zhí)行結(jié)果的變量過(guò)多,并且之間相互耦合;改變一個(gè)參數(shù)會(huì)影響其他參數(shù)的變化,所以,各參數(shù)對(duì)運(yùn)行結(jié)果無(wú)法進(jìn)行精確的數(shù)學(xué)描述。
在這種條件下,通過(guò)分析或?qū)嶒?yàn)找出一個(gè)對(duì)執(zhí)行結(jié)果影響貢獻(xiàn)值最大的輸入?yún)?shù),并在一定范圍內(nèi)修改這個(gè)輸入?yún)?shù);然后對(duì)實(shí)際運(yùn)行結(jié)果和期望運(yùn)行結(jié)果的誤差進(jìn)行分析,以此誤差作為修改輸入?yún)?shù)的依據(jù),并通過(guò)實(shí)驗(yàn)確定一個(gè)系數(shù),使系統(tǒng)運(yùn)行結(jié)果誤差呈收斂趨勢(shì)。在此前提下,經(jīng)過(guò)數(shù)次迭代,運(yùn)行結(jié)果誤差便可達(dá)到我們的要求。
舉個(gè)簡(jiǎn)單的例子,我們?cè)谙丛钑r(shí)調(diào)節(jié)水的過(guò)程就是一個(gè)典型的模糊控制算法——先根據(jù)經(jīng)驗(yàn)給一個(gè)初始的閥門位置,然后用手測(cè)試水溫。如水過(guò)熱,就將閥門向冷水端轉(zhuǎn);如水過(guò)冷,就向熱水端轉(zhuǎn)。通過(guò)幾次調(diào)節(jié),就可獲得我們期望的水溫。此過(guò)程中,旋轉(zhuǎn)閥門的次數(shù)是由我們根據(jù)實(shí)際水溫與期望水溫的差值決定的:差值越大,旋轉(zhuǎn)次數(shù)越多。量化的分析水溫差與轉(zhuǎn)動(dòng)角度,發(fā)現(xiàn)兩者存在線性關(guān)系,這個(gè)線性的斜率即為比例系數(shù)。只不過(guò)此處的系數(shù)是大腦根據(jù)經(jīng)驗(yàn)而獲得。
在該系統(tǒng)中,控制的具體思路為:分別計(jì)算當(dāng)前坐標(biāo)與畫(huà)面中心坐標(biāo)的水平和垂直的差值Δx、Δy,分別設(shè)置一個(gè)合理的比例系數(shù)Px、Py(由實(shí)驗(yàn)調(diào)試得來(lái)),使水平和垂直的轉(zhuǎn)速Vx、Vy滿足以下關(guān)系(Vx=Δx×Px;Vy=Δy×Py)。
將轉(zhuǎn)速輸出給伺服系統(tǒng)、伺服運(yùn)動(dòng)、帶動(dòng)相機(jī)運(yùn)動(dòng),然后再檢測(cè)自航模成像坐標(biāo)是否到達(dá)畫(huà)面中心,經(jīng)過(guò)反復(fù)幾次迭代,就可以將自航模坐標(biāo)調(diào)整到畫(huà)面中心。通過(guò)數(shù)據(jù)采集軟件得到各離散的坐標(biāo)點(diǎn),按照時(shí)間順序?qū)⑦@些點(diǎn)依次連接,便可獲得自航模運(yùn)動(dòng)軌跡。
3 系統(tǒng)功能驗(yàn)證
為驗(yàn)證該系統(tǒng)的測(cè)量精度,本文將船模分別運(yùn)行直線運(yùn)動(dòng)到5個(gè)點(diǎn)并停留,然后采用人工測(cè)量的方式進(jìn)行坐標(biāo)測(cè)量,并與系統(tǒng)測(cè)量結(jié)果進(jìn)行對(duì)比,獲得的結(jié)果如表1所示。
經(jīng)過(guò)對(duì)比,五組數(shù)據(jù)的最大誤差為12,要求比較高的自航模要求軌跡定位精度在30 mm,所以本系統(tǒng)可以滿足自航模實(shí)驗(yàn)需求。
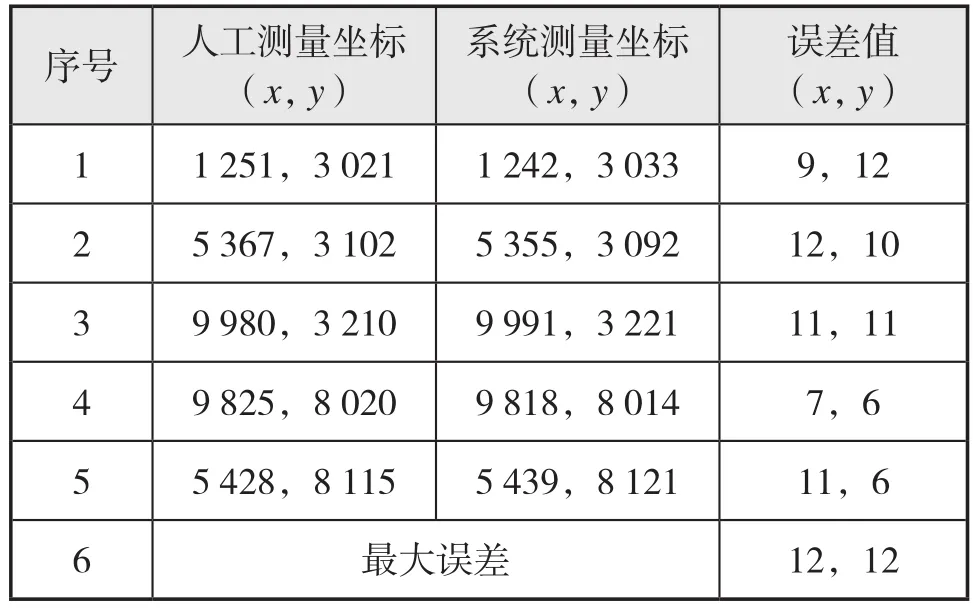
表1 測(cè)試結(jié)果mm
4 結(jié) 論
通過(guò)研究自航模運(yùn)行特點(diǎn)(即實(shí)驗(yàn)環(huán)境特點(diǎn)),研制出一套涵蓋紅外光學(xué)、圖像識(shí)別算法、伺服系統(tǒng)等技術(shù)領(lǐng)域的運(yùn)行軌跡跟蹤系統(tǒng),經(jīng)過(guò)測(cè)試,該系統(tǒng)能較好滿足高要求試驗(yàn)的需求。然而在研制過(guò)程中,仍然發(fā)現(xiàn)該系統(tǒng)存在某些不足之處:如自航模運(yùn)行速度過(guò)快時(shí)(大于2 m / s),伺服系統(tǒng)跟蹤不及時(shí)(初步判斷是識(shí)別算法耗費(fèi)時(shí)間過(guò)長(zhǎng)所致);若水面波浪過(guò)大,船模晃動(dòng)幅度較大時(shí),定位精度降低(初步判斷是曝光時(shí)間較長(zhǎng)而產(chǎn)生拖影)。我們將針對(duì)這些問(wèn)題開(kāi)展后續(xù)研究,以期妥善解決。
[1] 馮亮,魏軍,陳志誠(chéng).基于航跡偏差角和航向差的自航模運(yùn)動(dòng)軌跡控制方法研究[J].船海工程,2012(2):22-25.
[2] 王波,畢毅,李和平.水聲式自航模運(yùn)動(dòng)軌跡實(shí)時(shí)測(cè)量系統(tǒng)[J].船舶工程, 2003(2):12-14.
[3] 齊小偉,任光.基于領(lǐng)導(dǎo)跟隨的船舶航跡控制[J].船舶, 2016(1):92-99.
[4] 張磊,蘇為洲.伺服系統(tǒng)的反饋控制設(shè)計(jì)研究綜述[J].控制理論與應(yīng)用, 2014(5):32-35.
[5] 萬(wàn)鴻俊,魏天水,劉莉.直線電機(jī)伺服系統(tǒng)的設(shè)計(jì)與應(yīng)用研究[J].機(jī)械設(shè)計(jì)與制造, 2006(12):17-19.
[6](美)岡薩雷斯. 數(shù)字圖像處理[M].北京:北京電子工業(yè)出版社. 2009.
On automatic tracking system of motion trajectory for self-propelled ship model
MAO Ru-quan
(The Naval Deputy of Naval Ship Design and Research Room in shanghai District, Shanghai 200011, China)
A set of servo-controlled single camera automatic tracking system is developed through the study of the motion characteristics of a self-propelled ship model. The automatic tracking system consists of the horizontal rotation servo, the vertical rotation servo and the industrial camera installed on the servo system. The images are collected and processed to form a closed loop with the servo system. When the imaging of the ship model reaches the picture centring, the angles of the horizontal and vertical servo system are collected to calculate the current model coordinates. The motion trajectory is then drawn by linking to the former coordinate point. This system runs stably through the practical test, and its trajectory positioning precision can meet the engineering requirements.
self-propelled ship model; trajectory; tracking system; servo; picture processing
U666.1
A
1001-9855(2016)04-0074-04
10.19423 / j.cnki.31-1561 / u.2016.04.074
2016-02-23;
2016-05-04
冒如權(quán)(1979-),男,工程師,研究方向: 船舶電氣自動(dòng)化。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32