紅外目標可探測性研究*
2016-09-09 09:29:08戢博文李向春明德烈
艦船電子工程 2016年8期
戢博文 李向春 明德烈
(1.華中科技大學自動化學院 武漢 430074)(2.火箭軍裝備研究院 北京 100085)
JI Bowen1 LI Xiangchun2 MING Delie1
(1.School of Automation, Huazhong University of Science and Technology, Wuhan 430074) (2.Equipment Academy of the Rocket Force, Beijing 100085)
?
紅外目標可探測性研究*
戢博文1李向春2明德烈1
(1.華中科技大學自動化學院武漢430074)(2.火箭軍裝備研究院北京100085)
基于紅外成像系統性能分析的需要,將傳感器目標獲取性能特性簡化為概率探測模型,對目標的獲取能力進行預測和分析。論文采用建立的紅外成像系統MRTD模型,針對典型的紅外成像系統參數,基于二維約翰遜準則方法和目標傳遞概率函數,對不同的復雜野外環境下的現場性能進行仿真分析。對于指定的傳感器基本參數、目標背景特性、大氣環境,得到在不同的作用距離下對應的探測概率。最后通過對不同距離處識別概率點進行擬合,得到紅外成像系統識別目標的概率曲線。
MRTD模型; 約翰遜準則; 目標傳遞概率函數; 可探測概率
JI Bowen1LI Xiangchun2MING Delie1
(1.School of Automation, Huazhong University of Science and Technology, Wuhan430074) (2.Equipment Academy of the Rocket Force, Beijing100085)
Class NumberTN215
1 引言
紅外傳感器利用紅外成像技術來檢測目標。紅外成像系統的性能理論模型,通過分析系統各組成部分的物理特性,建立對應的物理數學模型,依靠計算機仿真技術,再現成像過程。紅外目標可探測性分析是紅外成像系統性能評估中的重要課題。通過對紅外成像系統各組成模塊進行建模仿真,建立成像系統的性能模型,根據不同的場景特性和大氣環境,分析在不同距離時目標的可探測性,并計算目標的獲取概率。此方法可以避免瑣碎的野外試驗,節約科研成本,同時可以為系統的優化和分析提供參考。方案通過將傳感器特性簡化成一個概率探測統計模型,來對傳感器的目標獲取性能進行建模。
2 紅外目標可探測模型
對于地面目標的探測,紅外傳感器使用ACQUIRE模型來決定探測概率。ACQUIRE模型由NVESD(夜視和電傳感器管理局)開發。該模型計算可見光、近紅外、紅外波段的成像系統中目標的獲得概率和平均探測時間。ACQUIRE模型的目標識別計算基于二維約翰遜準則[1]方法,并要求建立表征傳感器性能的最小可分辨對比度(MRC)或者最小可分辨溫差(MRTD)模型[2]。該模型可以計算在四種不同級別下的識別概率。目標獲取支持四種目標獲取級別:探測、分類、識別、鑒定。探測是指將軍事目標從視場中辨別的能力。分類是指將識別出的目標歸類,例如輪式或履帶式。識別指判斷目標的具體類別,如坦克、挖掘機或者個人汽車等。鑒別是指分辨出目標所屬類別的具體型號。ACQUIRE按照如下流程執行識別性能評估:首先計算到達傳感器的表觀信號,在系統的MRTD性能模型曲線基礎上,通過插值尋找空間頻率,計算目標可分解周期N。N50表示50% 探測概率下,目標可分解周期數。N和N50的比率提供了計算每種獲取級別所需的信息。
2.1表觀信號
對于MRC和MRTD傳感器,表觀信號由表觀對比度定義。它表示經過衰減并到達傳感器的本征信號。
C(R)=C(0)·Tc(R)
(1)
其中C(R)表示表觀對比度(溫差),C(0)表示本征對比度(溫差),Tc(R)表示從目標到傳感器的目標對比度透過率。
2.1.1本征信號
目標的本征信號定義為在傳感器波段上累積的未經大氣傳輸的紅外信號。本征信號分為兩類,MRC和MRTD。對于可見光和近紅外波段(MRC),信號通過目標和背景對比度測量。對于熱成像系統(MRTD),對比度差由目標和背景溫度差表示。溫差可以使用目標特征模型—統計溫差[3]計算。
2.1.2目標對比度透過率
MRC傳感器透過率需要考慮地空比(SGR)來計算對比度透過率。對于可見光和近紅外成像系統,路徑和背景輻射降低了目標的對比度。地空比是一個近似的方法,用于表示進入傳感器的散射輻射量。地空比由以下公式估算:
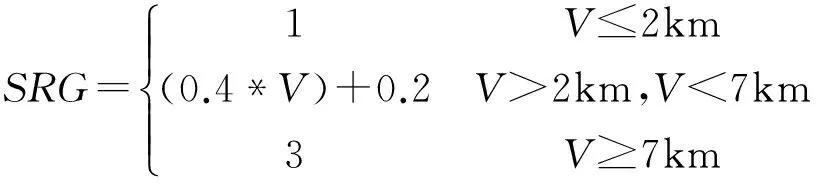
其中V表示氣象學可視距離。在氣象學中,能見度表征物體或者光線能被清楚辨別的距離。氣象學能見度描述了空氣的透明度。
一旦SGR計算出來,對比度透過率使用以下方程計算:
其中Tatm表示大氣透過率。對于MRTD傳感器,對比度透過率不考慮地空比,與Tatm相等,為方便計算,可以采用Bear定律[4]近似描述大氣消光作用。
2.2空間頻率
在計算出表觀對比度/溫差后,參考MRC/ MRTD的性能曲線來查詢對應的空間頻率。當表觀對比度/溫差無法對應到輸入MRC/MRTD數據時,通過線性插值來決定對應的空間頻率。傳感器性能曲線通過實驗測量或者理論推導的NVTherm模型[5~6]來產生。這些曲線用于描述傳感器的屬性。原理圖[7]如圖1。
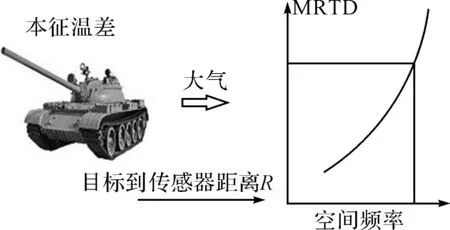
圖1 空間頻率計算示例圖
對于通用的二代紅外成像系統MRTD理論模型,水平、垂直方向上的MRTD理論計算通用公式[8]分別為
其中Ehh(f)、Evh(f)分別為水平測量MRTD時,眼腦系統在水平、垂直空間的積分函數。Ehv(f)、Evv(f)分別為垂直測量MRTD時,眼腦系統在水平、垂直空間的積分函數。σtvh[ 9 ]為成像系統三維噪聲。SNRTH為閾值信噪比,Kh(f)、Kv(f)為水平、垂直噪聲。MTFDh、MTFDv分別為水平、垂直方向上的系統調制傳遞函數。MTFL為靶長方向的傅里葉譜。
2.3目標可分解周期N
目標可分解周期數N表示目標清晰程度。N值越高,獲取概率越高。它由以下公式計算。
其中N表示目標的可分解周期數(cycles/mrad),Sf表示空間頻率(cycles/mrad),Mag表示放大倍率,Cd表示目標的特征尺度,R表示目標距離。
N50是在探測概率為50%時的可分解周期數。由于不同的獲取級別需要更多的目標細節,隨著獲取級別提升,N50也在增大。對于一個給定的情景,可以通過查表的方法決定合適的N50值[ 10 ]。表中N50的值通過對很多場景的測試而得到,不同的條件、傳感器、戰況等。該值一般作為實驗所得的附加數據提供,可以進一步求精。一個合適的N50值基于傳感器的種類、目標動態特性、背景雜亂水平、獲取級別。較新的方法使用方程執行MRTD傳感器的目標探測。這些計算N50的方法基于目標背景復雜度和目標動態性,方程如下:
其中ΔTRss表示目標背景溫差,C表示背景復雜度。
雜亂水平定義了混雜地形區域的復雜程度。可以通過地形雜亂水平(TCL)類型的定義為給定興趣區域指定雜亂水平。每一種地形都有一個相應的雜亂復雜度。
2.4獲取概率
目標的可分解周期和N50的比率如下:
Pinf表示給定時間內的獲取概率,使用經驗目標傳遞概率函數[ 11 ]計算,如下:
其中E=2.7+0.7*Ratio。
3 仿真與分析
采用紅外成像系統MRTD理論模型,針對典型成像系統參數,采用約翰遜準則和前文中表述的概率探測模型,對特定野外環境下的現場性能預測,可以得到不同距離處的識別概率。紅外成像系統現場性能預測的實現步驟如下:
1)根據測量的目標和背景輻射溫差,使用統計溫差法確定目標的固有溫差C(0),根據大氣消光系數計算大氣透過率Tc(R),得到目標在R距離處的表觀溫差C(R)。
2)根據紅外成像系統各種參數,建立系統水平和垂直方向的MRTD理論模型。
3)獲取系統MRTD曲線后,在對應曲線上找到對應的空間頻率。該頻率Sf使得
C(R)=MRTD(Sf)
4)根據目標面積、距離和空間頻率計算目標可分解周期N,N50。
5)根據目標傳遞概率函數,求取目標的探測概率。
仿真分析的參數如下:
目標與背景參數:目標長寬高6.0m×2.7m×2.3m,目標溫度291K,背景溫度285K,目標背景輻照比均為1.0。大氣消光系數0.1788。方向角為45°,俯仰角為60°。背景復雜度為2.0。
光學系統和探測器參數:焦距275μm,視場大小0.1126rad×0.0751rad,探測器長寬50μm×62.5μm。
根據熱成像系統基本參量和MRTD模型可得,到MRTD曲線如圖2、圖3。
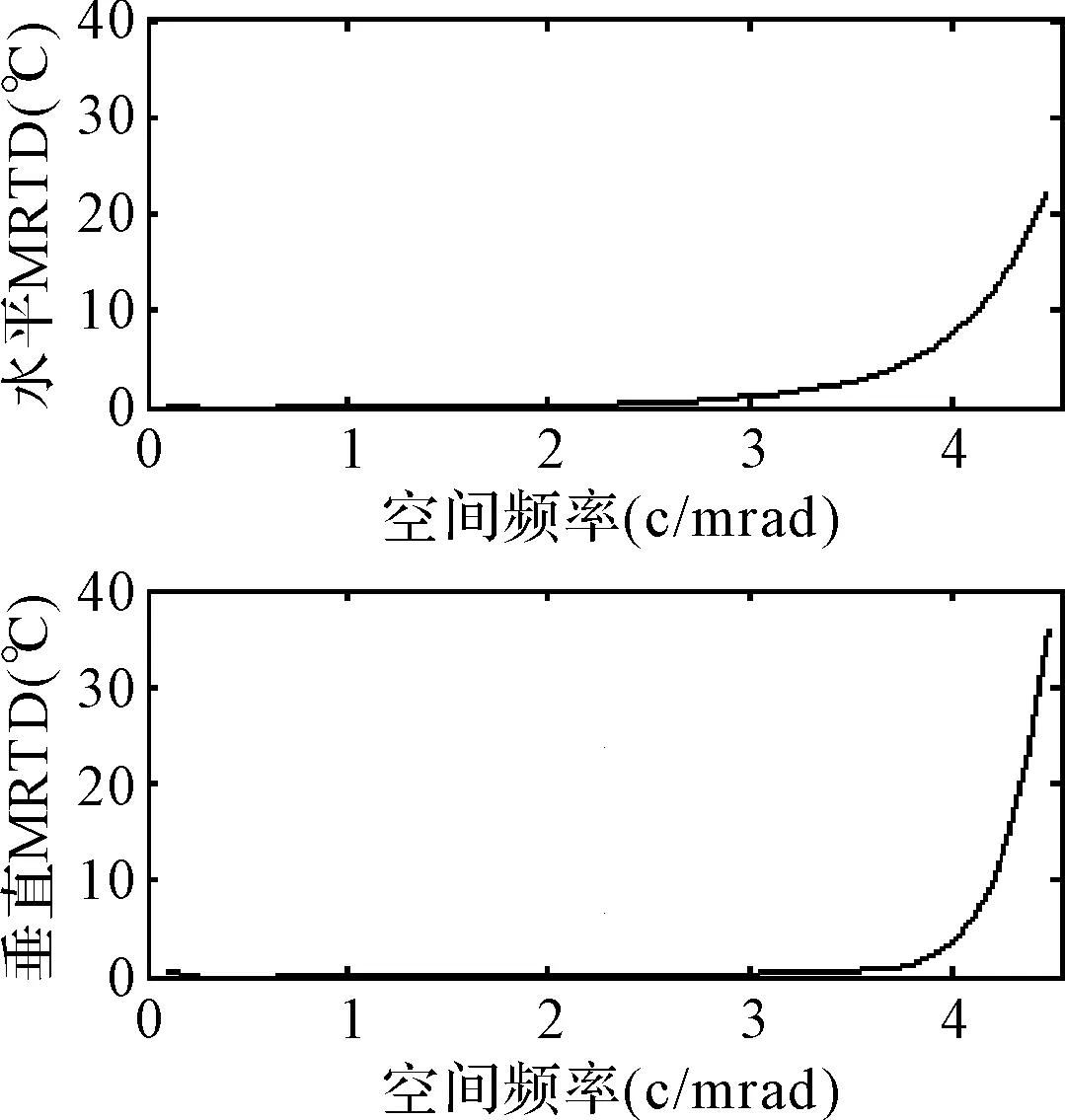
圖2 MRTD曲線
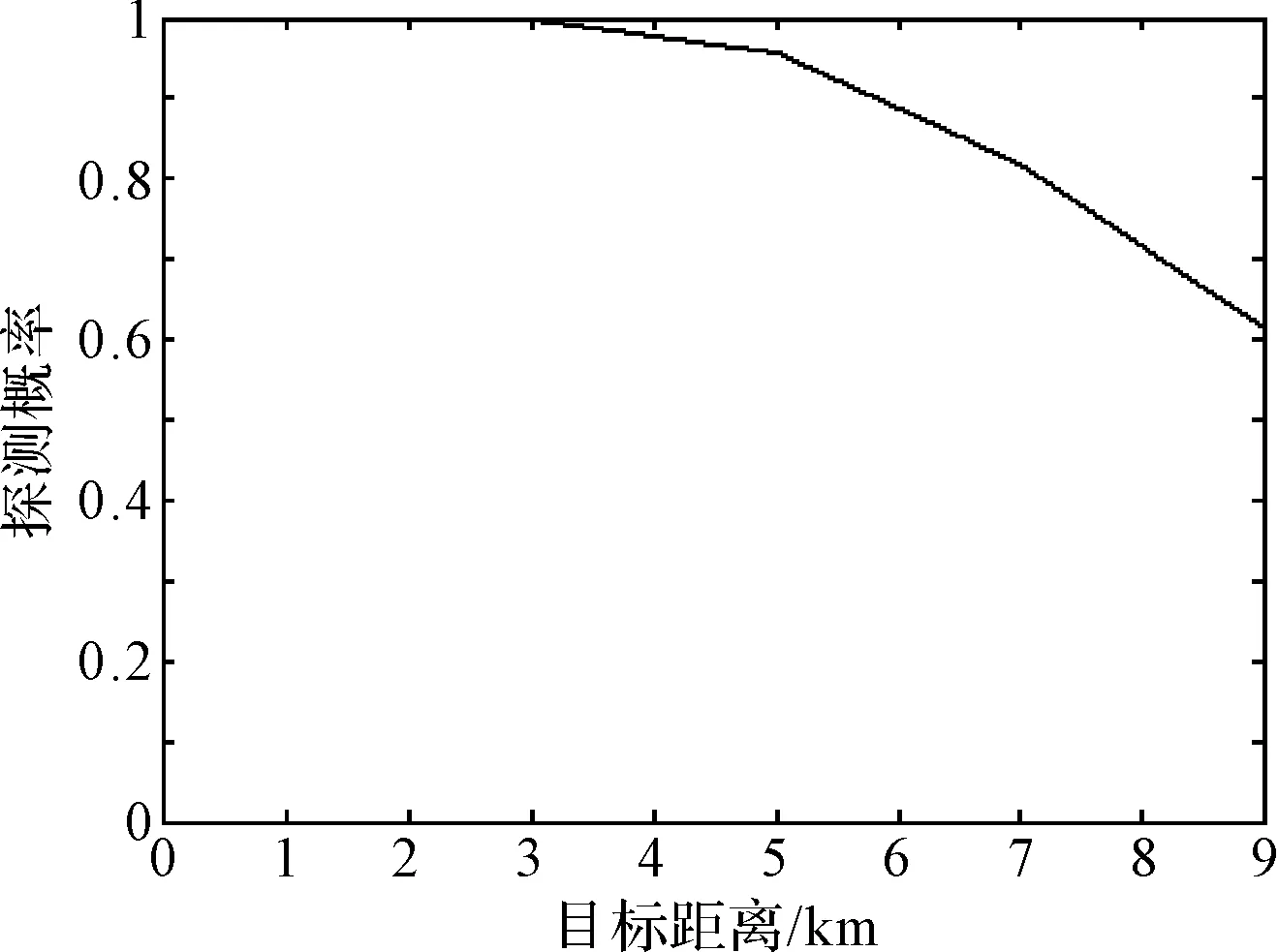
圖3 探測概率曲線
4 結語
本文對紅外成像系統的目標獲取性能模型進行了研究。通過將紅外成像系統的目標獲取性能簡化成概率探測模型,對特定的系統參數、大氣環境、目標和背景特性,進行不同場景下的現場性能預測,得到在不同的作用距離下目標的獲取概率。為紅外系統的設計和目標的獲取可能性作預測,能優化系統設計并對目標實地探測的必要性作判斷,節約紅外成像系統的制作和野外試驗的成本。
[1] Scott L B, D’Agostino J A. NVEOD FLIR92 thermal imaging systems performance model[C]//Aerospace Sensing. International Society for Optics and Photonics,1992:194-203.
[2] Rosell F A. VIDEO, DISPLAY, AND PERCEIVED-IMAGE SIGNAL-TO-NOISE RATIOS[J]. The Fundamentals of, Theirmal’Iaghin Sytem,1979:49.
[3] 王憶鋒,馮熾燾.關于目標熱對比度(ΔT)概念的研究[J].紅外技術,1999,21(2):7-10.
[4] Fried D L. Optical resolution through a randomly inhomogeneous medium for very long and very short exposures[J]. JOSA,1966,56(10):1372-1379.
[5] Maurer T, Driggers R G, Vollmerhausen R H, et al. 2002 NVTherm improvements[C]//AeroSense 2002. International Society for Optics and Photonics,2002:15-23.
[6] Webb C M, Halford C E. Dynamic minimum resolvable temperature testing for staring array imagers[J]. Optical Engineering,1999,38(5):845-851.
[7] Ratches J A. Night vision modeling: historical perspective[C]. AeroSense’99. International Society for Optics and Photonics,1999:2-12.
[8] 張建奇,王曉蕊.光電成像系統建模及性能評估理論[M].西安:西安電子科技大學出版社,2010.
[9] Wittenstein W. Performance prediction and experimental assessment of advanced thermal imagers[C]//SPIE’s 1994 International Symposium on Optics, Imaging, and Instrumentation. International Society for Optics and Photonics,1994:563-574.
[10] Dudzik M C. Electro-optical systems design, analysis, and testing[J]. Electro Optical Systems Design,1993(1).
[11] Holst G C. Applying the log-normal distribution to target detection[C]//Aerospace Sensing. International Society for Optics and Photonics,1992:213-216.
Detectability of Infrared Target*
To meet the needs of performance analysis of infrared imaging system, the characteristic of target acquisition performance of the sensor is simplified as a probability model of acquisition to analyze and predict the ability of target acquisition. This paper utilizes the MRTD model of infrared imaging system and bases on two-dimensional Johnson cycle criteria methodology and target transform probability function to simulate the field performance for a set of typical system parameter and different complex environment. For specified system parameter, target-background feature and atmospheric environment, the acquisition probability under different operating distance is obtained. Finally the probability points of different range are fitted to get the target acquisition performance curve of infrared imaging system.
MRTD, Johnson cycle criteria, target transform probability function, detectability probability
2016年2月4日,
2016年3月10日
國家自然科學基金項目(編號:61273241)資助。
戢博文,男,碩士研究生,研究方向:目標檢測。李向春,男,碩士,助理研究員,研究方向:精確制導、虛擬仿真等。明德烈,男,副教授,研究方向:人工智能控制、圖像處理和模式識別等。
TN215
10.3969/j.issn.1672-9730.2016.08.044
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
汽車工程師(2021年12期)2022-01-17 02:29:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
當代陜西(2020年14期)2021-01-08 09:30:42
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
