基于空間分布的三維自動化肺結節分割算法
2016-09-09 00:35:51張俊杰王文文師宏斌
電視技術 2016年8期
張俊杰,周 濤,夏 勇,王文文,師宏斌
1.寧夏醫科大學 理學院,寧夏 銀川 750004;2.西北工業大學 計算機學院,陜西 西安 710100;
3.寧夏醫科大學總醫院 泌尿外科,寧夏 銀川 750004)
?

基于空間分布的三維自動化肺結節分割算法
張俊杰1,周濤1,夏勇2,王文文1,師宏斌3
(
1.寧夏醫科大學 理學院,寧夏 銀川 750004;2.西北工業大學 計算機學院,陜西 西安 710100;
3.寧夏醫科大學總醫院 泌尿外科,寧夏 銀川 750004)
針對肺結節分割中存在的自動化程度低、較少考慮空間結構以及粘附型肺結節分割不充分問題,提出了一種基于空間分布的三維自動化肺結節分割算法。該算法首先利用C-means聚類算法分割出肺實質,然后根據肺結節空間分布的差異性將其分為3類:孤立性肺結節、胸膜粘附性肺結節、血管粘附性肺結節,并對3種不同類型的肺結節分別采用基于連通性、灰度下降和散度差異的分割算法進行分割,70個肺結節(其中孤立性肺結節38個,血管粘附性肺結節17個,胸膜粘附性肺結節15個)CT圖像的實驗結果表明,算法能夠準確、自動地分割出3種不同部位的肺結節。
肺結節分割;自動化分割;三維分割;醫學圖像處理
1 肺結節分割方法
近年來,隨著空氣質量的惡化、二手煙危害的加深、職業因素的影響等原因,肺癌已成為世界范圍內發病率及死亡率最高的惡性腫瘤[1],計算機輔助診斷(Computer-Aided Diagnosis,CAD)能夠在降低醫生工作量的同時提供具有重要參考價值的圖像解釋信息[2],聯合醫生進行肺結節的雙重篩選,從而輔助醫生作出定性判別結果[3],因此,進行CAD研究具有重要的現實意義。目前,計算機斷層掃描成像(Computed Tomography,CT)是多種模態醫學成像中最能夠凸顯肺部疾病征象的影像學手段[4],而肺癌最常見的早期形態為肺結節(lung nodules)[5],該階段正是肺癌患者進行有效治療的最佳時期[6],因此,利用CT圖像進行肺結節的輔助診斷對于肺癌的早期發現具有重要意義。感興趣區域(Region of Interest,ROI)的精確分割是進行特征刻畫和分類識別的重要前提,因此,肺結節分割算法一直是CAD研究的熱點之一,國內外眾多學者提出了許多新型肺結節分割方法,如Diciotti[5]等提出了一種基于三維測地距離圖來進行局部形狀分析的分割算法,該算法利用一種自動校正的方法進行了血管粘附性結節的局部優化,提高了近血管結節的分割質量;Dehmeshki[7]等以一個固定的尺寸結合形態學算子方法去除了血管區域,進一步用迭代的方法重建形態學算子,但這種重建會使一部分附著在血管上的小結節體積估算偏大;Santos[8]等利用區域生長法分割出肺實質,并根據高斯混合模型和海森矩陣從肺實質中分離出肺結節;Netto[9]等利用增長型神經氣體(Growing Neural Gas,GNG)進行聚類粗分割,然后根據三維距離變換把肺結節從含有血管、支氣管的組織中分離出來。然而,目前已有的肺結節分割方法還存在以下不足:
1)分割過程需要人工干預,難以滿足自動化的分割要求;
2)較少考慮肺結節與其他組織的毗鄰關系,并且對不同類型的肺結節采用相同的分割算法,導致分割誤差較大;
3)基于二維圖像處理的分割算法通常會丟失空間結構信息,不利于ROI三維特征的提取。
基于以上原因,本文提出了一種基于空間分布的三維自動化肺結節分割算法,該算法首先在三維連通的基礎上利用C-means聚類算法分割出肺實質,然后在充分考慮肺結節的空間分布的基礎上將肺結節分為3類:孤立性肺結節、胸膜粘附性肺結節和血管粘附性肺結節,最后針對以上3種類型肺結節的灰度分布和幾何結構特點,分別采用基于連通性、灰度下降、散度差異的算法進行分割。為了驗證算法的有效性和可行性,本文做了5組實驗,即肺實質分割實驗、孤立型肺結節分割實驗、胸膜粘附型肺結節分割實驗、血管粘附型分割實驗、分割正確率檢測實驗,實驗結果表明,該算法能夠比較理想地分割出不同部位的肺結節。
2 肺結節分類
醫學圖像往往涉及人體各類組織器官,具有數據海量性、灰度模糊性、結構復雜性、噪聲顯著性等特點,因此,肺結節分割算法不僅要關注閾值的設定,更要探討目標成像的拓撲結構,本文在基于空間分布的醫學劃分上進行了更細致的描述[5],如圖1所示(圖中圓圈區域即為不同類型的肺結節),根據肺結節生長位置的不同將其分為3類:孤立型肺結節、胸膜粘附型肺結節、血管粘附型肺結節。
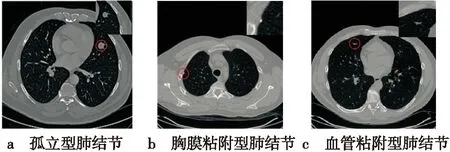
圖1 肺結節分類示意圖
從單層CT切片來看,3種不同類型的肺結節分別具有以下特點:
孤立型肺結節:結節周圍無明顯的雜質,通常呈圓形或橢圓形,易于實現二值化分割。
胸膜粘附型肺結節:結節通常表現為氣管、支氣管、胸膜上的凸起組織,外形不規則,其中胸膜粘附型肺結節與胸膜、心臟等組織灰度極其接近,且灰度值呈小范圍、低亮度分布。
血管粘附型肺結節:結節粘附在血管上,與胸膜粘附型肺結節不同的是,該類型結節與血管連接通路的灰度由兩極向中間呈下降趨勢分布。
3 本文算法
CT序列切片實際是1組三維灰度圖像,影像醫生一般只對每張斷層圖像中進行逐一觀測,但卻缺少Z方向的動態鏈接,因此,這種CT讀片方式會丟失一定的三維結構信息,基于以上分析,本文以三維體素為數字圖像運算單元對肺部CT圖像進行分割,根據CT圖像中肺部成像的結構特點,肺結節分割算法主要包括肺實質分割和肺結節分割兩大內容。肺實質分割是去除CT影像中的雜質區域(包括背景、胸腔骨骼、脂肪、肌肉、氣管等),只保留對肺結節檢測與識別有價值的肺實質部分;肺結節分割是從肺實質(包括肺泡、血管、胸膜等)中分離出3種不同類型的肺結節。本文算法思想如下:
肺實質分割:首先用Otsu算法對肺部CT序列切片進行二值化處理,然后對二值化圖像進行三維連通,然后以CT圖像中各連通區域與圖像中心的距離為特征進行聚類,分割出二值化的肺實質,最后,為避免胸膜粘附型結節在以上處理過程中被刪除,則采用形態學算子膨脹二值化的肺實質,并將結果圖像與原始灰度圖像進行掩模運算,得到具有灰度信息的肺實質。
肺結節分割:首先根據連通區域面積大小從得到的肺實質圖像中分離出胸膜區域(胸膜區域為最大連通區域面積,用于提取胸膜粘附型肺結節)和肺內區域(提取孤立性肺結節和血管粘附型肺結節),然后根據醫生標記的坐標從肺內區域中分割出孤立性肺結節;分離出的胸膜區域與拉普拉斯算子進行卷積,得到其散度圖像,并根據設定的閾值(本文為0.5)分割出散度較大的區域,即胸膜粘附型肺結節;血管粘附型肺結節與血管連通區域的灰度值由兩端向中間遞減,首先進行局部灰度峰值檢測,將這些峰值體素點作為種子點進行灰度值下降的區域生長,最后刪除區域生長中的重復區域便可分割出血管粘附型肺結節。
基于以上算法思想,圖2給出了該算法的流程圖。
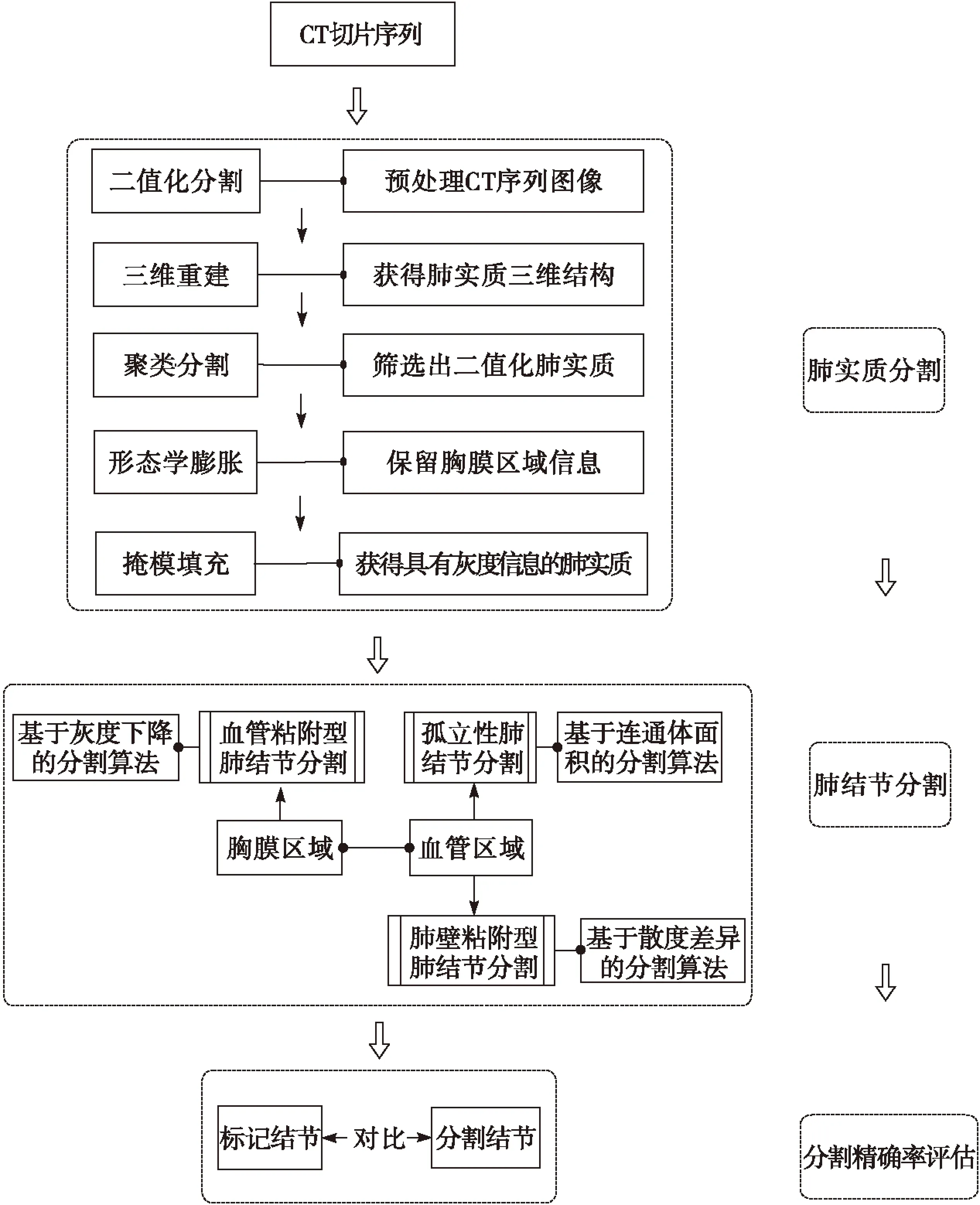
圖2 基于空間分布的三維自動化肺結節分割流程圖
4 仿真實驗
本文實驗所涉及的軟、硬件環境如下:
軟件環境:Windows 7操作系統,Matlab R2014b,ImageJ 1.48u。
硬件環境:Intel Core i5 4670-3.4GHz(CPU),8.0 Gbyte(內存),2.0 Gbyte顯存(顯卡),500 Gbyte(硬盤)。
實驗數據:采用經過影像科醫生標記的70例肺結節患者的CT圖像(共2 232幅,其中孤立性肺結節38例,血管粘附性肺結節17例,胸膜粘附性肺結節15例)作為實驗樣本,大小均為512×512,厚度為2 mm。
4.1實驗一:肺實質分割
原始的胸部 CT 圖像通常包括背景、肺組織、血管、氣管、骨骼、脂肪、肌肉等,而真正對肺結節檢測與識別有價值的只有肺實質部分,因此,肺實質的精準分割直接影響CAD系統的實際臨床應用價值[10]。本文提出分割算法中的肺實質分割主要包括以下5個步驟:
1)圖像二值化:采用Otsu 算法對肺部CT序列切片圖像(圖3a)進行二值化處理,得到二值化肺部CT序列切片圖像(圖3b)。
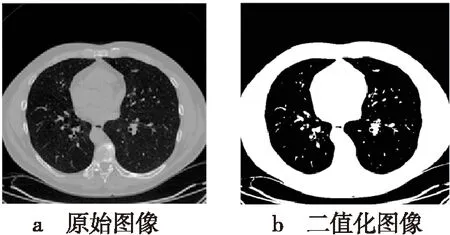
圖3 圖像二值化
2)三維連通:實現二值化肺部CT序列切片圖像的三維方向6鄰域(即上、下、左、右、前、后)連通(圖4a),重建的肺部三維圖像如圖4b所示。

圖4 三維連通
3)聚類分割:對肺部的三維圖像利用C-means進行聚類(連通區域中心點與圖像中心點的距離作為聚類特征,各連通區域中心點分布如圖5a所示),得到不同的三維連通區域(如肺實質、背景、胸腔輪廓、噪聲等),保留由二值化的肺實質構成的三維連通區域,其他區域用“白色”代替。

圖5 聚類分割
4)膨脹運算:利用形態學算子對二值化肺實質進行膨脹運算(保留胸膜粘附性結節),形態學膨脹相當于對二值圖像中值為1的像素連接區域的進行擴展,用B(x)代表結構元素,對工作空間E中的每一點x,膨脹結果F為
F=E?B={x:B(x)?E}
(1)
膨脹后得到的三維肺實質輪廓如圖6所示。

圖6 膨脹運算
5)掩模運算:膨脹后的肺實質輪廓與原始CT圖像進行“乘積”掩模運算,得到包含灰度信息的肺實質圖像(圖7)。

圖7 掩模運算
圖8給出了部分肺實質的分割結果,圖中大圓圈區域為非肺部組織,但其灰度與肺部極其接近,卻沒有被誤分割到肺部區域中去,并且某些切片內肺部沒連接到一起的小區域(如小圓圈區域),也能被很好地劃分成肺部區域,由此可見,該算法在肺實質分割過程中既沒有過分割,也沒有遺漏候選區域,這說明該算法對肺實質的分割是極其有效的。

圖8 肺實質示例圖
4.2實驗二:孤立型肺結節分割
孤立型肺結節在3類結節中的所占比例最大,圖9是通過三維連通并進行不同顏色標記的孤立型肺結節。
經過肺實質分割過程中的形態學膨脹和組織填充,肺部已變成了帶血管和胸膜的凸體,因此只需要再對這個肺部反過來進行與膨脹算子同樣大小的形態學腐蝕操作即可得到肺內區域(包括血管、血管粘附型肺結節、孤立型肺結節、肺泡等,如圖10a),而被分離的胸膜區域可以作為胸膜粘附型結節分割對象(圖10b),然后根據醫生標記的坐標在肺內區域中分割出孤立型肺結節,部分孤立型肺結節的分割結果如圖11所示。

圖9 孤立型肺結節示例圖

圖10 肺內區域與胸膜分離

圖11 孤立型肺結節分割結果
4.3實驗三:胸膜粘附型肺結節分割
胸膜粘附型結節與其他兩類結節的差異表現在其與胸膜區域的灰度值差異較小(除了胸膜外的肋骨和其他特殊組織),基于灰度的分割方法難以進行有效的分割,通過實驗可知,胸膜粘附型肺結節的內部灰度變化為由內向外不斷降低,其散度與周圍組織存在較大的差異,因此選用散度結果區分胸膜粘附性結節與其周圍粘連組織是可行的。三維CT數據x,y,z三個方向的微分量表示該區域向周圍擴散的灰度變化,而拉普拉斯算子作為最簡單的各向同性微分算子,具有旋轉不變性,其特性非常適用于處理該問題,因此本文采用拉普拉斯算子作為濾波器對ROI進行卷積運算計算散度,得到其散度圖像(圖12b),然后根據對CT數據的測試可知,散度閾值設定為均值0.5時(0和1代表最小和最大的L的值)效果最好,取大于0.5的區域獲得胸膜粘附性肺結節(圖12c),部分胸膜粘附型肺結節的分割結果如圖13所示。

圖12 胸膜粘附型肺結節分割示例圖

圖13 胸膜粘附型肺結節分割結果
(2)
式中:f為ROI灰度值;L為其散度值。
4.4實驗四:血管粘附型肺結節分割
為解決血管粘附型肺結節的分割和肺內血管組織粘連的問題,本文采用基于灰度下降的區域生長算法。
如圖14所示,分別取“山脈”和“山丘”(“山丘”為結節,如峰1;“山脈”為血管,如峰3)的頂峰作為種子點,進行灰度下降的區域生長(即每個體素只往周圍灰度值比它低的點擴散),因此,要完成粘連部分的分割只需將兩個生長區域中的重合區域刪除(如圖14中最下方的深色區域)即可,便可得到血管粘附型肺結節。

圖14 基于灰度下降的區域生長算法示意圖
為彌補算法對噪聲敏感而產生誤差,本文首先對圖片進行三維高斯平滑濾波,然后采用灰度窗口變換,將灰度值大于l的體素x(M)的灰度值都修改為l
(3)
式中:I(x(M))表示體素x(M)的取值;M是感興趣區域掩模,是與圖像一樣規格的邏輯矩陣,值為x(M)表示只訪問M中值為l的元素,l的取值如下
(4)
即三維影像感興趣區域中灰度值小于l的體素個數Nl占該區域總體素個數Nx(M)的比值應大于等于α。根據實驗測試,α取0.7效果最好。
處理結果如圖15所示(“山丘”及“山脈”的“峰頂”會被剃平),再對整個ROI求區域灰度極大值,便可獲得這些“平頂”(此時的峰頂就由單個體素變成了多個體素區域,與其相臨體素的灰度值均低于該區域),最后取該區域作為種子點進行灰度下降,便可成功地分離出與血管相連的結節區域,部分血管粘附型肺結節的分割結果如圖16所示。

圖15 窗口變換后的基于灰度下降的區域生長算法示意圖

圖16 血管粘附型肺結節分割結果
4.5實驗五:肺結節分割結果分析
經過對70例肺結節進行分割提取,并與標記的肺結節數量進行比對,其分割正確率和算法耗時如表1所示。
表1分割正確率和算法耗時

結節類型結節總數/個正確分割數/個正確率/%平均分割耗時/s孤立性肺結節383694.71.8血管粘附性肺結節171694.11.3胸膜粘附性肺結節151493.31.1
由此可見,本文算法的平均分割正確率在93%以上,算法耗時也保持在較低的水平,已基本滿足不同類型肺結節的分割提取。
5 小結
本文在分析肺結節分割算法研究現狀的基礎上,總結出算法研究中存在的3個問題(通常采用二維分割,較少考慮三維空間結構;自動化程度低,需要過多的人工干預;肺結節分類不明確,對不同類型的肺結節采用相同的分割算法),并提出了一種基于空間分布的三維自動化肺結節分割算法,該算法首先剔除雜質區域,分割出具有研究價值的肺實質,然后利用肺結節的空間分布差異性分別采取不同的三維分割提取算法,實驗結果證明該算法能夠無監督且準確地分割出肺結節,保留了其三維結構信息,對于肺結節的檢測與識別研究具有重要意義。
[1]RIAZSP,LüCHTENBORGM,COUPLANDVH,etal.Trendsinincidenceofsmallcelllungcancerandalllungcancer[J].Lungcancer,2012,75(3):280-284.
[2]THEODORIDISS,KOUTROUMBASK.Patternrecognition[M].NewYork:AcademicPress,2008.
[3]SAHINERB,CHANHP,HADJIISKILM,etal.EffectofCADonradiologists'detectionoflungnodulesonthoracicctscans:analysisofanobserverperformancestudybynodulesize[J].Acadradiol,2009,16(12):1518-1530.
[4]BALDWINDR.Predictionofriskoflungcancerinpopulationsandinpulmonarynodules:significantprogresstodrivechangesinparadigms[J].Lungcancer,2015,89(1):1-3.
[5]DICIOTTIS,PICOZZIG,FALCHINIM,etal. 3-DsegmentationalgorithmofsmalllungnodulesinspiralCTimages[J].IEEEtransactionsoninformationtechnologyinbiomedicine,2008,12(1):7-19.
[6]FERLAYJ,SOERJOMATARAMI,DIKSHITR,etal.Cancerincidenceandmortalityworldwide:sources,methodsandmajorpatternsinGLOBOCAN2012[J].International
journalofcancer,2015,136(5):359-386.
[7]KOSTISWJ,REEVESAP,YANKELEVITZDF,HENSCHKECI.Three-dimensionalsegmentationandgrowth-rateestimationofsmallpulmonarynodulesinhelicalCTimages[J].IEEEtransactionsonmedicalimaging,2003,22(10):1259-74.
[8]SANTOSAM,FILHOA,SILVAAC,etal.Automaticdetectionofsmalllungnodulesin3DCTdatausinggaussianmixturemodels,tsallisentropyandSVM[J].Engineeringapplicationsofartificialintelligence,2014(36):27-39.
[9]NETTOSMB,SILVAAC,NUNESRA,etal.Automaticsegmentationoflungnoduleswithgrowingneuralgasandsupportvectormachine[J].Computersinbiologyandmedicine, 2012,42(11):1110-1121.
[10]李彬,田聯房,歐陜興.惡性肺結節早期診斷智能識別相關技術綜述[J].生物醫學工程學雜志,2009,26(5):1140-1145.
責任編輯:時雯
Three-dimensional automation segmentation algorithm of lung nodule based on spatial distribution
ZHANG Junjie1,ZHOU Tao1,XIA Yong2,WANG Wenwen1,SHI Hongbin3
(1.SchoolofScience,NingxiaMedicalUniversity,Yinchuan750004,China;2.SchoolofComputerScience,NorthwesternPolytechnicalUniversity,Xi’an710100,China;3.UrinarySurgery,GeneralHospitalofNingxiaMedicalUniversity,Yinchuan750004,China)
In terms of the low degree automation in lung nodules segmentation,the spatial structure is less considered and insufficient segmentation in adhesion nodules,a three-dimensional lung nodules automatic segmentation algorithm based on spatial distribution was put forward. C-means clustering algorithm is firstly used to segment the lung parenchyma, and then lung nodules are divided into three categories according to the difference of the spatial distribution: isolation lung nodules, pleural adhesion lung nodules, and vascular adhesion lung nodules, methods based on connectivity, gray level decrease and the difference of divergence are respectively used to segment lung nodules of three different types, the the experimental results of CT images about 70 lung nodules(solitary pulmonary nodule:38,vascular adhesion lung nodules:17,pleural adhesion lung nodules:15)show that the algorithm can accurately and automatically segment the lung nodules of three different parts.
lung nodules segmentation; automated segmentation; three-dimensional segmentation; medical image processing
TN391
A
10.16280/j.videoe.2016.08.004
國家自然科學基金項目(81160183;61561040);寧夏自然科學基金項目(NZ14085);陜西省語音與圖像信息處理重點實驗室開放課題項目(SJ2013003)
2015-11-05
文獻引用格式:張俊杰,周濤,夏勇,等.基于空間分布的三維自動化肺結節分割算法[J].電視技術,2016,40(8):19-25.
ZHANG J J,ZHOU T,XIA Y,et al. Three-dimensional automation segmentation algorithm of lung nodule based on spatial distribution [J].Video engineering,2016,40(8):19-25.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
