無位置傳感器異步電機矢量控制系統(tǒng)研究
2016-09-10 07:28:49魏宇峰胡文斌
電氣技術(shù) 2016年8期
魏宇峰胡文斌
(南京理工大學(xué)自動化學(xué)院,南京 210094)
無位置傳感器異步電機矢量控制系統(tǒng)研究
魏宇峰1胡文斌2
(南京理工大學(xué)自動化學(xué)院,南京 210094)
異步電機因其制造簡單、性能高、轉(zhuǎn)動慣量小、可靠性高等諸多優(yōu)點在變頻調(diào)速領(lǐng)域得到廣泛運用,在國民生活中占據(jù)了越來越重要的地位。本文以交流異步電機為研究對象,采用IRMCF341電機主控芯片,分析直流母線單電阻電流采樣重構(gòu)技術(shù),利用反電動勢法估算電機轉(zhuǎn)子速度和位置,完成異步電機無位置傳感器矢量控制算法。最后對控制系統(tǒng)進行整體實驗調(diào)試,實驗結(jié)果表明無位置傳感器矢量控制算法是正確可行的。
單電阻電流采樣;異步電機;矢量控制
異步電機相對于永磁同步電機具有結(jié)構(gòu)簡單,運行可靠,轉(zhuǎn)速高,成本低且易于維護等諸多優(yōu)點,越來越廣泛應(yīng)用于工農(nóng)業(yè)生產(chǎn)的各個領(lǐng)域,因此對異步電機的調(diào)速系統(tǒng)提出了更高的性能要求。
三相異步電機的動態(tài)數(shù)學(xué)模型是一個高階、非線性、強耦合的多變量系統(tǒng)[1]。1971年,德國西門子公司的的F. Blaschke與美國的P. C. Custma等提出了基于磁場定向的新型交流電機控制方式,這是最早出現(xiàn)的矢量控制理論雛形。矢量控制算法的核心思想是通過對磁鏈和轉(zhuǎn)矩的解耦將電機模型等效。
矢量控制算法的核心思想是磁場定向控制,通過坐標(biāo)變換將定子電流矢量變換至兩相旋轉(zhuǎn)坐標(biāo)系,以運動中的轉(zhuǎn)子為參照物,則定子的勵磁和轉(zhuǎn)矩電流矢量可等效為一個直流量,相對于電機轉(zhuǎn)子靜止。因此,就可用一臺直流電機來等效異步電機,根據(jù)磁鏈定向原理分別對電機的勵磁電流和轉(zhuǎn)矩電流進行控制,以達到控制轉(zhuǎn)矩的目的[2],使得交流電機擁有與直流電機一樣優(yōu)越的控制性能。能否準(zhǔn)確檢測電機的相電流將直接影響電機矢量控制系統(tǒng)的性能。目前高性能電機驅(qū)動系統(tǒng)正逐步擺脫軟件的束縛向純硬件方向發(fā)展,即基于 FPGA或 ASIC實現(xiàn)電機控制。在這種大環(huán)境下,專為控制永磁同步電機和交流異步電機設(shè)計的高性能集成芯片IRMCF341應(yīng)運而生。本文基于國際整流器公司(International Rectifier,IR)推出的IRMCF341電機控制芯片設(shè)計無位置傳感器控制算法,并搭建軟硬件平臺實現(xiàn)電機的驅(qū)動。
1 異步電機矢量控制算法設(shè)計
實現(xiàn)無位置傳感器矢量控制算法,首先基于單電阻采樣重構(gòu)計算出電機定子電流,進一步計算出電機反電動勢,對反電動勢積分獲得轉(zhuǎn)子磁鏈[3],進而得到轉(zhuǎn)子角度,產(chǎn)生帶有死區(qū)的 PWM控制信號。
1.1單電阻電流采樣及相電流重構(gòu)原理分析
單電阻電流重構(gòu)技術(shù)的算法核心是,直流母線電流與電機相電流的關(guān)系由三相逆變器開關(guān)狀態(tài)決定,由此可知,若逆變器的開關(guān)狀態(tài)已知,就可以構(gòu)造出網(wǎng)側(cè)某相電流。IRMCF341芯片利用單電阻采樣從直流母線上獲得電流信號,電流信號結(jié)合逆變器的開關(guān)狀態(tài)就可以重構(gòu)出網(wǎng)側(cè)某相電流[4]。以開關(guān)矢量(100)作用為例,直流側(cè)電流的流通路徑如圖1所示,此時直流母線電流idc等于電動機a相電流ia。

圖1 逆變器開關(guān)狀態(tài)為(100)的電流通路
采樣電阻一次電流采樣只能重構(gòu)出一相電流,只需在一個PWM周期內(nèi)當(dāng)2個基本電壓矢量分別作用時分時重構(gòu)出兩相電流,然后通過 ia+ib+ic=0就可計算出第三相電流。以電壓矢量Uout位于I扇區(qū)為例,U4(100)、U6(110)和零矢量在一個分成7段的采樣周期內(nèi)分時作用。為避免開關(guān)瞬時變化引起的電流毛刺,通常在矢量作用的中點時刻進行電流采樣,即在圖2中對應(yīng)的ts1和ts2處對idc進行采樣,定義采樣得到的電流為idc1、idc2,則有:ia=idc1,ic=-idc2,ib=-(ia+ic)。
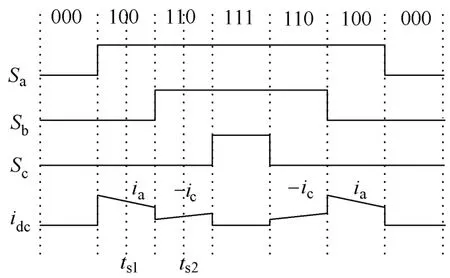
圖2 電壓作用矢量與母線電流的對應(yīng)關(guān)系
同理,表1列出了在其他扇區(qū)內(nèi)三相電流與兩個采樣值idc1、idc2的對應(yīng)關(guān)系。

表1 直流母線電流和電機相電流對應(yīng)關(guān)系
實際情況下要實現(xiàn)單電阻采樣電流重構(gòu)有一個基本的前提條件,即在非零空間電壓矢量作用時,要保證直流母線電流采樣有足夠的采樣窗口。因此,要完成相電流重構(gòu),非零矢量的作用時間至少要大于電流采樣一次所需的最短時間。
1.2轉(zhuǎn)子位置與速度估計
本文采用反電動勢法估算轉(zhuǎn)子位置,包括磁鏈觀測和角度-頻率生成。通過磁鏈觀測器計算得到電機轉(zhuǎn)子磁場的勵磁分量。
由坐標(biāo)變換的相關(guān)內(nèi)容可知,三相靜止坐標(biāo)系下的電流iA、iB、iC和兩相靜止坐標(biāo)系下的電流iα、iβ間的轉(zhuǎn)換關(guān)系如式(1)所示,即

經(jīng)過坐標(biāo)變換得到αβ坐標(biāo)下的等效電路方程,如式(2)所示,即

磁鏈計算公式如式(3)所示,即

式中,ψα、ψβ為轉(zhuǎn)子磁鏈在定子坐標(biāo)系αβ上的投影,uα、uβ為定子坐標(biāo)系αβ上的定子電壓,iα、iβ為采樣電阻采集到的三相定子電流在坐標(biāo)系αβ上的轉(zhuǎn)換電流,Rs為定子電阻,L為定子電感[5]。
設(shè)基于實際轉(zhuǎn)子位置的坐標(biāo)系為dq坐標(biāo)系,轉(zhuǎn)子估計位置所在軸線為δγ 坐標(biāo)系,此外定義一個靜止的αβ坐標(biāo)系,它們的矢量關(guān)系如圖3所示。
由圖3可推出下式的關(guān)系:


圖3 轉(zhuǎn)子磁鏈?zhǔn)噶繄D
式中,K=ψf1,Δθ =θr-θe。定義電機實際的轉(zhuǎn)子角度θr和估計的轉(zhuǎn)子角度θe的差為Δθ,如果Δθ 是已知的,那么利用鎖相環(huán)結(jié)構(gòu)就可精確求得到轉(zhuǎn)子速度ωe和角位置θe信息。
根據(jù)矢量控制的基本原理及SVPWM技術(shù),可建立如圖4所示所示的異步電機矢量控制結(jié)構(gòu)圖。
2 IRMCF341芯片功能簡介
IRMCF341采用QFP64封裝,是一款集成了電機運動控制引擎和 8051為處理器的高性能的控制芯片,圖5為IRMCF341的內(nèi)部結(jié)構(gòu)圖。
電機運動控制引擎MCE包含電機外設(shè)、運動控制時序發(fā)生器、用于數(shù)據(jù)交換的雙端口 RAM等硬件電路控制電機的所有控制資源。MCE是軟硬件混合體,矢量控制中電流環(huán)基于純硬件電路實現(xiàn),設(shè)置對應(yīng)寄存器控制參數(shù)實現(xiàn)電流環(huán)調(diào)節(jié);速度環(huán)控制基于軟件方式,通過修改MCE代碼實現(xiàn)調(diào)節(jié)速度環(huán)的結(jié)構(gòu)及弱磁控制。該系統(tǒng)利用直流母線單電阻采樣電流,基于專用數(shù)模混合電路實現(xiàn)單電阻采樣電流重構(gòu),采用反電勢積分法實現(xiàn)轉(zhuǎn)子位置與速度估計,進一步實現(xiàn)異步電機矢量控制。
除MCE外,IRMCF341集成了8051高速8位微處理器,可實現(xiàn)用戶接口、上位機通信等上層控制,其指令系統(tǒng)、基本操作與標(biāo)準(zhǔn)Intel 8051處理器并無不同。8051通過512字節(jié)雙端RAM向MCE的寄存器組讀取、發(fā)送信息,實現(xiàn)電機控制、主機通信、上層控制任務(wù)及用戶接口等功能,除此之外,另提供一個JTAG端口來實現(xiàn)仿真和調(diào)試。

圖4 異步電機矢量控制結(jié)構(gòu)圖

圖5 IRMCF341內(nèi)部結(jié)構(gòu)圖
IRMCF341芯片采用雙核集成,不僅顯著提升電機控制性能,而且大大簡化了硬件電路,提高電路可靠性,在控制高速、復(fù)雜的電機領(lǐng)域優(yōu)勢顯著[6]。
3 電機控制系統(tǒng)的構(gòu)成與實現(xiàn)
3.1硬件電路設(shè)計
本文矢量控制系統(tǒng)包括整流電路、開關(guān)電源電路、功率驅(qū)動與保護電路、采樣電路等,以IRMCF341為核心的硬件電路設(shè)計方案如圖6所示。

圖6 控制系統(tǒng)硬件電路設(shè)計方案
該控制系統(tǒng)中,電機相電流信息的準(zhǔn)確性直接影響轉(zhuǎn)子角度估算結(jié)果,對電機的控制性能至關(guān)重要。MCE利用 A/D模塊檢測采樣電阻上的電流信息,經(jīng)過 RC轉(zhuǎn)換電路,采樣電流轉(zhuǎn)換成電壓信號送至MCE的A/D口。IGBT驅(qū)動電路采用驅(qū)動芯片IR21366及其外圍電路組成,IR21366是6路集成橋式驅(qū)動芯片,其輸出電壓范圍為 10~20V,最大輸出電流可為4A。系統(tǒng)利用IR21366接收PWM脈沖信號驅(qū)動MOSFET管,逆變模塊輸出三相電流來驅(qū)動電機。
3.2系統(tǒng)的軟件實現(xiàn)
系統(tǒng)的軟件設(shè)計是基于硬件模塊實現(xiàn),MCE模塊庫提供了全面的功能模塊,可根據(jù)需要自由組合來實現(xiàn)相應(yīng)控制方案。
要搭建無位置傳感器異步電機的驅(qū)動控制系統(tǒng),第一步基于Matlab/Simulink環(huán)境下組合功能模塊實現(xiàn)矢量控制算法,生成*.mdl文件;第二步利用MCE編譯器在線編譯,得到MCE處理器的可執(zhí)行文件,該可執(zhí)行文件由結(jié)構(gòu)配置文件、C源代碼頭文件、寄存器列表及地址文件構(gòu)成,最后將可執(zhí)行文件下載到控制芯片中。
軟件算法完成后需要進行實際調(diào)試,借助機調(diào)試工具軟件MCE Wizard和MCE Designer調(diào)試電機,進一步優(yōu)化功能寄存器組、電流取樣寄存器組的配置電機參數(shù)。一旦滿足系統(tǒng)實際需要,就可確認(rèn)驅(qū)動參數(shù),8051代碼所要完成的工作就是用C語言實現(xiàn)MCE De signer環(huán)境下的電機驅(qū)動參數(shù)調(diào)試以及其他功能,使電機控制系統(tǒng)達到設(shè)計要求。電機系統(tǒng)調(diào)試流程如圖7所示。
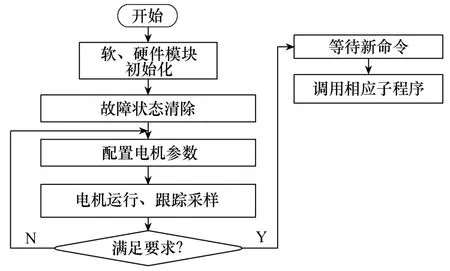
圖7 電機系統(tǒng)調(diào)試流程圖
4 實驗結(jié)果
本實驗選用額定功率500W的無刷異步電機,利用MCE Designer的波形跟蹤功能(Trace Setup)采樣電機運行波形。
電機控制系統(tǒng)硬件調(diào)試平臺如圖8所示,單電阻電流采樣重構(gòu)波形如圖9所示(V、W相),實驗波形近似標(biāo)準(zhǔn)正弦波行,顯示電流重構(gòu)模塊的優(yōu)越性能,保證了后續(xù)轉(zhuǎn)子位置與速度估計的精確。圖10為速度設(shè)定和反饋曲線,顯示電機雖然運行平穩(wěn)但無法達到額定的電機速度,所示的問題是電機無法在指定的時間里達到指定的速度,分析力矩參考曲線判斷出問題的根源出在速度環(huán)PI調(diào)節(jié)器上。增加速度環(huán)PI調(diào)節(jié)器的積分增益后得到的速度參考和速度反饋、速度環(huán)PI輸入輸出波形如圖11、圖12所示。可以看出,速度可以達到設(shè)定值,此時PI調(diào)節(jié)器的輸出很小,輸出的力矩基本為恒定值。

圖8 電機控制系統(tǒng)硬件調(diào)試平臺

圖9 采樣電流后重構(gòu)的V相、W相電流波形
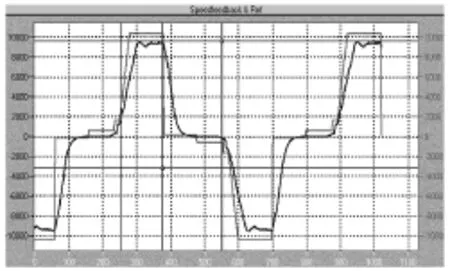
圖10 速度設(shè)定和反饋曲線

圖11 調(diào)節(jié)PI積分增以后的速度設(shè)定和速度反饋

圖12 速度環(huán)PI輸入輸出波形
5 結(jié)論
本文分析了單電阻電流采樣及相電流重構(gòu)的方法,采用了IR公司的雙核芯片IRMCF341作為主控芯片,實現(xiàn)了異步電機無位置傳感器矢量控制。此方法淘汰了傳統(tǒng)電動執(zhí)行機構(gòu)所必須的復(fù)雜的電機轉(zhuǎn)向控制箱,簡化了電機控制過程,大大節(jié)約了開發(fā)成本,具有較高的使用價值。
[1] 陳伯時. 電力拖動自動控制系統(tǒng)運動控制系統(tǒng)[M].北京: 機械工業(yè)出版社, 2003.
[2] 陳小波, 胡育文, 黃文新, 等. 基于單電阻電流采樣的矢量控制算法研究[J]. 電氣傳動, 2011, 41(5):15-19.
[3] 孫兵成, 藍維隆, 郭海亞. 簡述無位置傳感器PMSM 的新型控制方案設(shè)計[J]. 伺服控制, 2008,23(7): 27-30.
[4] Kim H, Jahns T M. Phase current Reconstruction for AC motor drivers using a DC Link single current sensor and measurement voltage vector[J]. IEEE Transactions on Power Electronics, 2006, 21(5): 1413-1419.
[5] 于落星, 張浩然. 基于 IRMCF341的無位置傳感器電動汽車控制器設(shè)計[J]. 電子器件, 2010, 33(6):794-797.
[6] 鄒馳, 李志俊. 一款高性能的電機控制芯片——IRMCF341[J]. 中國集成電路, 2005, 4(4): 61-64.
Research on Position Sensorless Asynchronous Motor Vector Control System
Wei Yufeng1Hu Wenbin2
(Automation College of Nanjing University of Science and Technology, Nanjing 210094)
Asynchronous motor is widely used in the field of frequency control of motor speed,because of its simple manufacture, high performance, small moment of inertia, high reliability advantages, and occupies a more and more important position in the national life. Based on the main motor control chip IRMCF341, a technique that makes the current sampling and reconstruction of the DC bus realized was analyzed in this paper. The sensorless control algorithm of asynchronous motor was completed, using the method of back electromotive force to estimate the motor rotor speed and position. Finally the debugging experimental of the whole control system was done, and the experimental results verify the correctness and feasibility of the sensorless vector control algorithm.
single shunt current sampling; Asynchronous motor; vector control
江蘇省科技支撐計劃項目(BE2013125)
江蘇省產(chǎn)學(xué)研聯(lián)合創(chuàng)新資金-前瞻性聯(lián)合研究項目(BY2013004-01)
魏宇峰(1987-),男,江蘇省徐州市人,南京理工大學(xué)碩士研究生,研究方向為異步電機及其控制技術(shù)。