旋轉尺蠖壓電電機驅動機構自由振動分析
2016-09-13 06:58:29邢繼春
中國機械工程 2016年15期
關鍵詞:振動
邢繼春 張 楠 李 沖
燕山大學,秦皇島,066004
?
旋轉尺蠖壓電電機驅動機構自由振動分析
邢繼春張楠李沖
燕山大學,秦皇島,066004
提出了一種新型旋轉尺蠖壓電電機。考慮旋轉尺蠖壓電電機驅動機構為連續系統,建立了驅動機構動力學模型;利用該動力學模型求解了樣機驅動機構的固有頻率和模態函數。分析了系統參數對驅動機構固有頻率的影響規律,為旋轉尺蠖壓電電機的設計打下了理論基礎。
旋轉尺蠖;驅動機構;模態分析;壓電電機
0 引言
近年來,利用尺蠖運動原理的壓電高精密微位移驅動器逐漸應用于精密測量、微機電系統、精密加工裝配、納米科學儀器、生物細胞操縱和半導體裝備等領域[1]。壓電精密驅動器根據輸出的運動形式分為直線型和旋轉型[2],根據驅動信號的頻率可分為準靜態驅動器和超聲驅動器。準靜態驅動器驅動信號頻率較低,常見的有尺蠖壓電電機、慣性沖擊式壓電電機等[3]。驅動信號頻率較高的超聲驅動器中關于行波超聲電機研究的文獻較多,成果也較為突出[4]。而且,現有的旋轉型壓電電機中行波超聲電機最為常見,其特點為輸出速度較高、行程較大,但在高精密定位中其定位精度和分辨率較低[5]。而準靜態壓電電機中的尺蠖壓電電機則能將大行程與高精度、高分辨率很好地兼容,并且克服了慣性沖擊式壓電電機輸出力矩較小的缺點[6]。
目前,尺蠖壓電電機設計研究的類型多為直線型驅動器,將尺蠖驅動機理應用到精密旋轉驅動技術中的實例不多[7],并且該種電機的傳動系統的驅動與控制理論尚不完善,因此,大大限制了尺蠖電機在微動精密控制領域中的應用[8-9]。本文提出了一種新型旋轉尺蠖壓電微動電機。該電機以壓電疊堆作為驅動元件,由于定子的特殊結構,當工作時驅動機構可產生角度位移;并且具有實現箝位裝置可調、單個零件結構簡單、能夠實現微動壓電電機大行程等優點。本文針對旋轉尺蠖壓電電機的關鍵部件驅動機構建立動力學模型,并進行自由振動分析。
1 旋轉選尺蠖壓電機工作原理
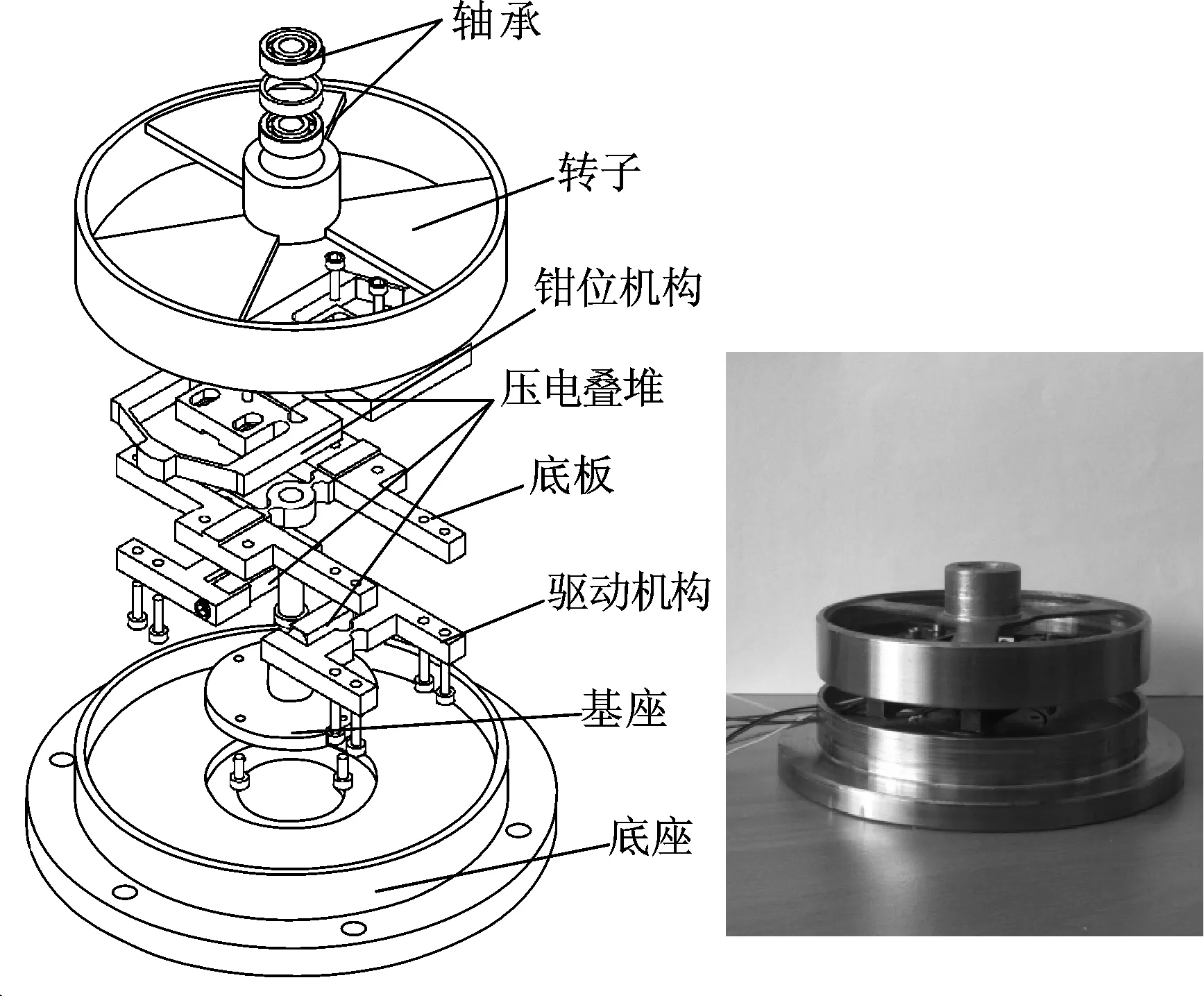
圖1 旋轉尺蠖壓電電機
圖1為旋轉尺蠖壓電電機實物圖及爆炸圖。時序驅動信號如圖2所示,圖2中A為驅動電壓幅值,T為電機工作一個周期的時間。當施加圖2a所示的時序信號時,圖3中壓電疊堆1伸長,鉗位機構3頂住轉子。繼續輸入圖2b所示時序信號,壓電疊堆5伸長,由于驅動機構利用杠桿位移放大原理,驅動機構7發生彎曲。鉗位機構3帶動轉子9順時針轉過一定角度θ。當輸入圖2c所示時序信號時,壓電疊堆2伸長頂住轉子后,撤銷壓電疊堆1和5的電壓信號,鉗位機構3和驅動機構7恢復原狀。鉗位機構4帶動轉子轉過角度θ。將壓電疊堆6輸入圖2d所示的時序信號后,壓電疊堆6伸長,驅動機構8發生彎曲,鉗位機構4再帶動轉子順時針轉過角度θ。撤銷壓電疊堆2和6的電壓信號,鉗位機構4和驅動機構8恢復原狀。完成了一個周期的動作。重復上一周期的動作,以此來實現完整的連續運動。

(a)壓電疊堆1 (b)壓電疊堆2

(c)壓電疊堆3 (d)壓電疊堆4圖2 時序驅動信號
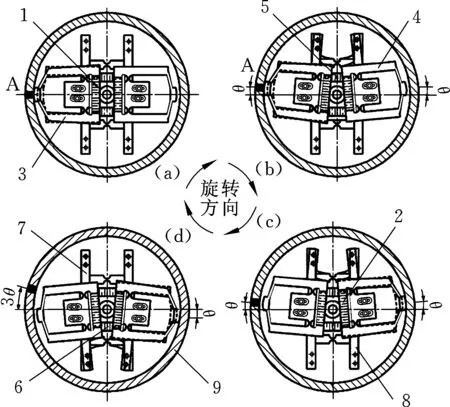
圖3 驅動原理示意圖
2 驅動機構動力學模型的建立
如圖4所示,驅動機構由基座和驅動機構兩部分固連組成,并通過基座上的中心孔與固定軸形成過盈配合,其中1為壓電堆,2為支撐梁,3為驅動梁,4為基座梁。建立驅動機構動力學模型,對驅動機構進行相應的簡化。驅動機構關于x軸、y軸成反對稱結構,因此,取驅動機構的1/4進行動力學問題研究,并作以下假設:
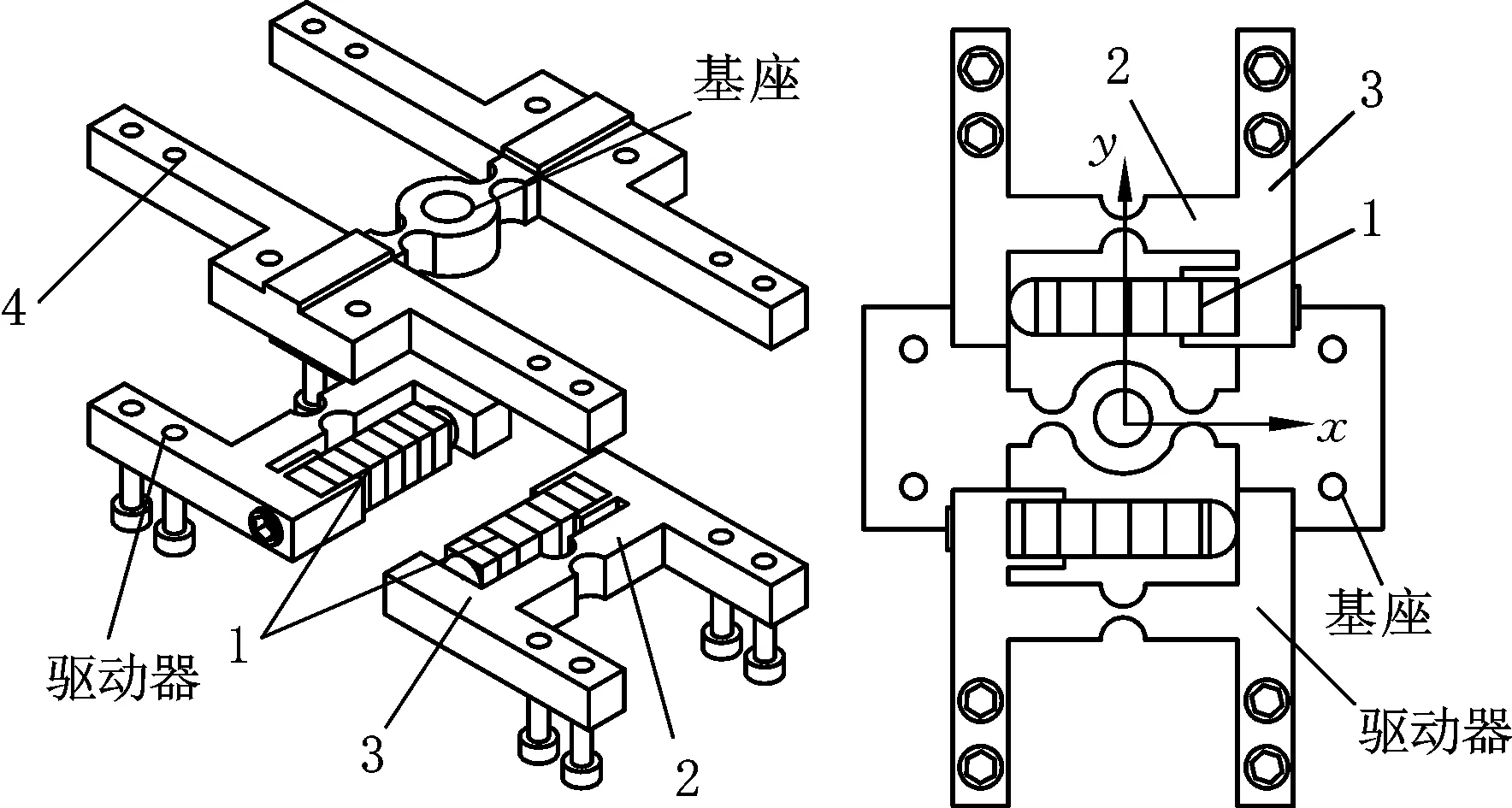
圖4 驅動機構軸測爆炸圖和驅動機構平面圖
(1)考慮驅動機構的彈性變形主要發生在壓電疊堆、支撐梁、驅動梁和基座梁上。
(2)考慮支撐梁的長度小于截面高度的5倍,該梁段為鐵摩辛柯梁,故考慮截面剪切慣量和轉動慣量。
(3)考慮支撐梁和基座梁處兩尺寸相同的柔性鉸鏈彎曲變形,忽略拉伸變形,將柔性鉸鏈視為鉸鏈與卷簧的組合,卷簧剛度為K,可利用直圓型柔性鉸鏈轉動剛度公式[7]求解:
s=R/t
式中,Mz為關于z軸的彎矩;αz為關于z軸的轉角;E為驅動機構材料彈性模量;hj為鉸鏈寬度;t為凹口處最小厚度;R為切口半徑。
(4)驅動梁與基座梁通過兩個螺釘固連。考慮兩梁在兩螺釘位置l5、l6處有相同的動態位移,如圖5所示。
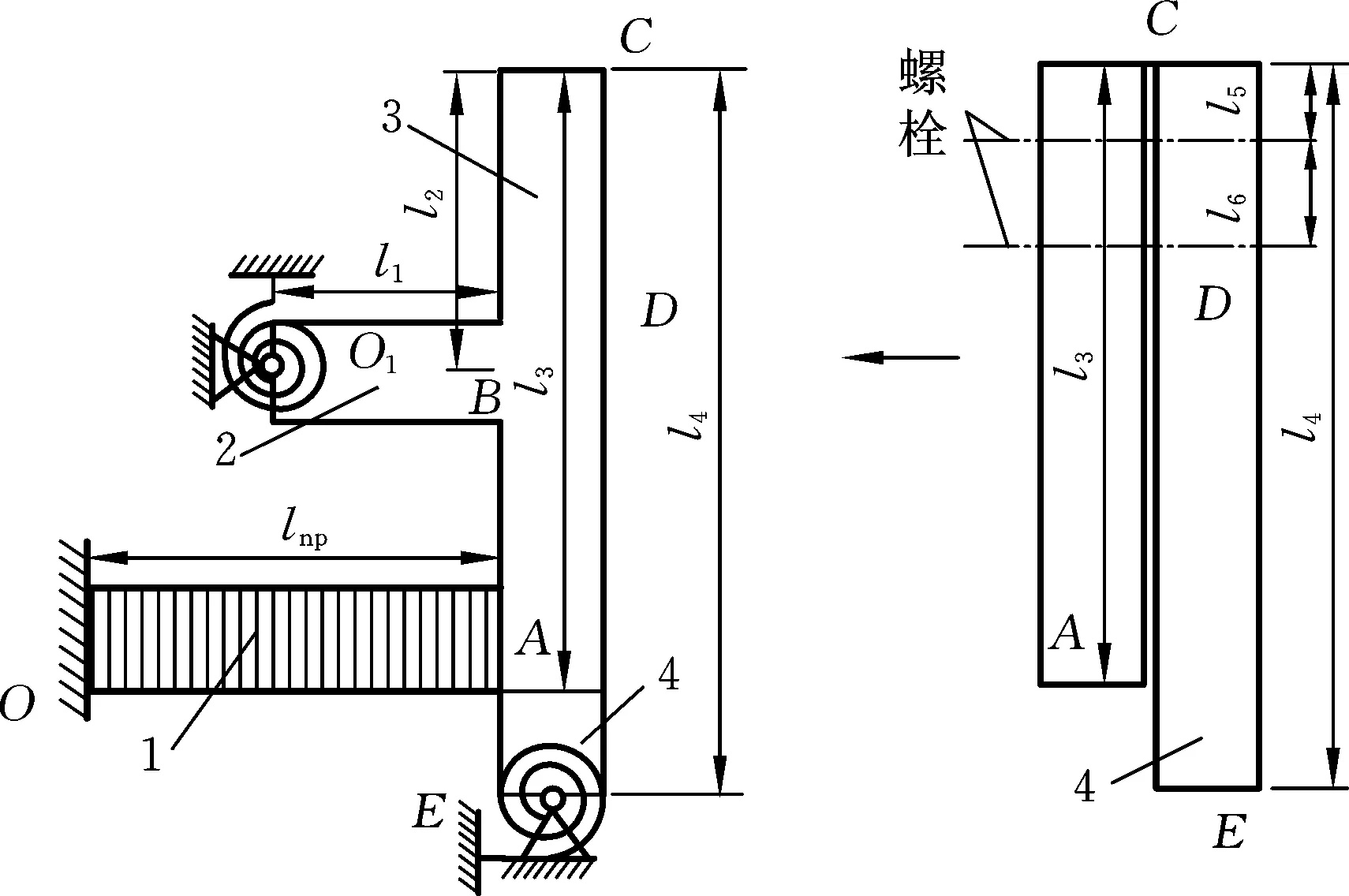
圖5 驅動機構簡化模型圖
2.1壓電堆自由振動
壓電疊堆為多層壓電陶瓷片的粘合體。考慮壓電疊堆為連續系統,忽略層與層間的能量耗損,預緊力不能使壓電堆產生電荷,忽略預緊力對動力學模型的影響,只考慮壓電疊堆縱向振動。
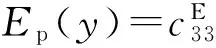
(1)
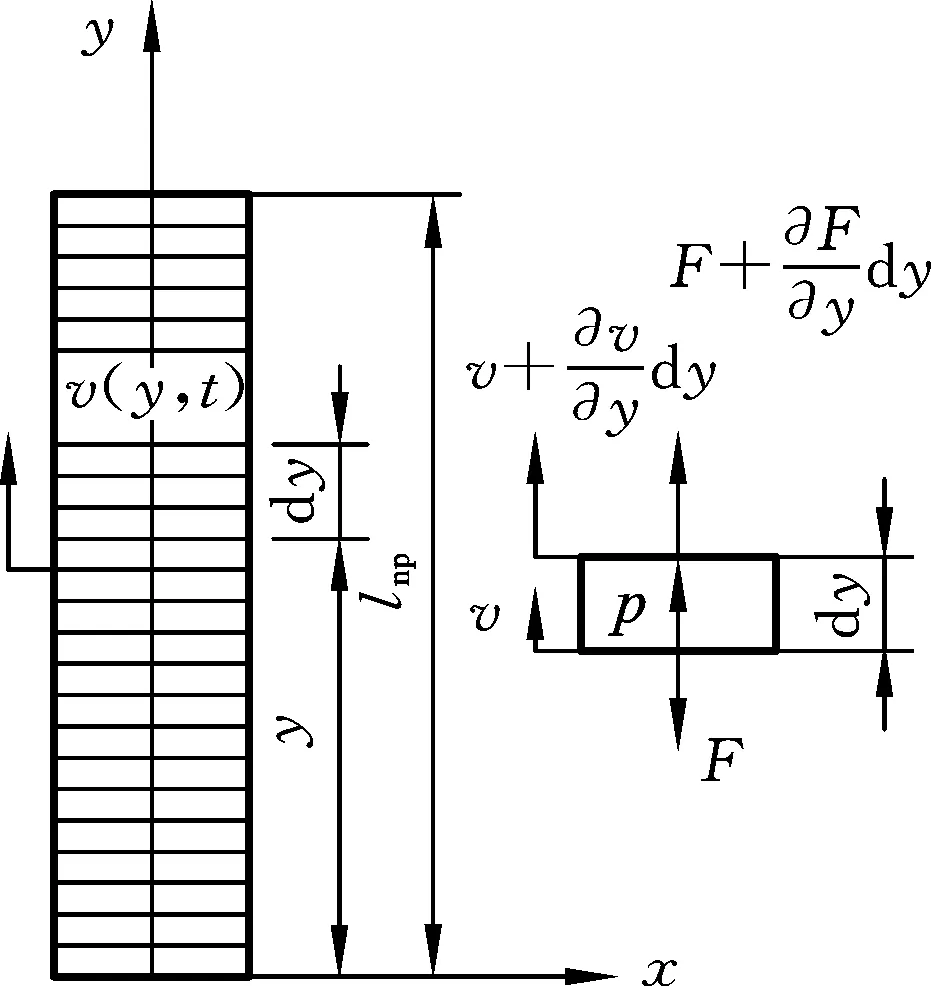
圖6 壓電堆動力學模型
由壓電本構方程推導出軸向內力表達式:
(2)
其中,d33為壓電系數,當驅動電壓信號V(t)=0時,把式(2)代入式(1),令p=0,得到壓電堆軸向振動偏微分方程:
(3)
設式(3)解的形式為
v(y,t)=φp(y)q(t)
(4)
其中,q(t)為廣義坐標,壓電堆軸向振動模態φp(y)為
(5)
系數Ai(i=1,2)由邊界條件確定,進而得出無窮多個固有頻率ωi(i=1,2,…)及對應的模態函數φpi(i=1,2,…)。
2.2支撐梁自由振動
簡化支撐梁,其動力學模型如圖7所示,考慮支撐梁的長度小于截面高度的5倍,認為該梁為鐵摩辛柯梁模型,O1端柔性鉸鏈簡化為簡支端和定剛度卷簧,剛度為K。對支撐梁模型建立坐標系,對應的彎曲振動橫向位移為y1(x1,t),梁的密度和彈性模量分別為ρ、E,橫截面積為S1,極慣性矩為I1,作用在梁上的分布載荷為f(x1,t)。
圖7 支撐梁動力學模型
設梁的切變模量為G,取厚度dx1為研究對象,截面產生的切應變γ=Fs/(κGS1),Fs為單元所受剪力,κ為截面形狀因素。截面因剛體轉動產生的角度θ和應變γ都使中心軸的切線偏轉,則有?y1/?x1=θ+γ。
對微元應用牛頓第二定律列出平衡方程:
f(x1,t)dx1
(6)
令式(6)中f=0,代入切應變,化簡可得
(7)
考慮截面轉動產生的慣性力矩,建立力矩平衡方程:
(8)
其中,M為單元所受彎矩;J為截面轉動慣量,J=ρI1。
由力矩和轉角的關系知M=-EI1?θ/?x1,代入式(8),化簡整理得
(9)
從式(7)、式(9)中消去θ,可得鐵摩辛柯梁動力學方程:
(10)
僅考慮轉動慣量的影響,忽略剪切變形,式(10)可簡化為
(11)
設式(11)中解的形式為
y1(x1,t)=φ(x1)q(t)
(12)
其中,φ(x1)為支撐梁的模態函數。代入式(11)得
(13)

(14)

(15)
設式(15)解的一般形式為
φ(x1)=eλx1
(16)
將式(16)代入式(15),導出本征方程為
λ4+δ2λ2-β4=0
(17)
解出4個本征值:±iβ1,±β2,其中
則式(15)的通解,即支撐梁的模態函數為
φ(x1)=B1cos(β1x1)+B2sin(β1x1)+
B3sinh(β2x1)+B4cosh(β2x1)

其中,系數Bi(i=1,2,3,4)可由邊界條件確定,并可得到無窮多個固有頻率ωi(i=1,2,…)及對應的模態函數φi(i=1,2,…)。
2.3驅動梁和基座梁自由振動
驅動梁和基座梁動長度均大于截面寬度的5倍,可視為歐拉-伯努利梁。兩個梁左端分別在長度為l5、l6處利用螺栓固連,驅動梁右端與壓電堆相連,基座梁右端利用柔性鉸鏈約束。其動力學模型如圖8所示。
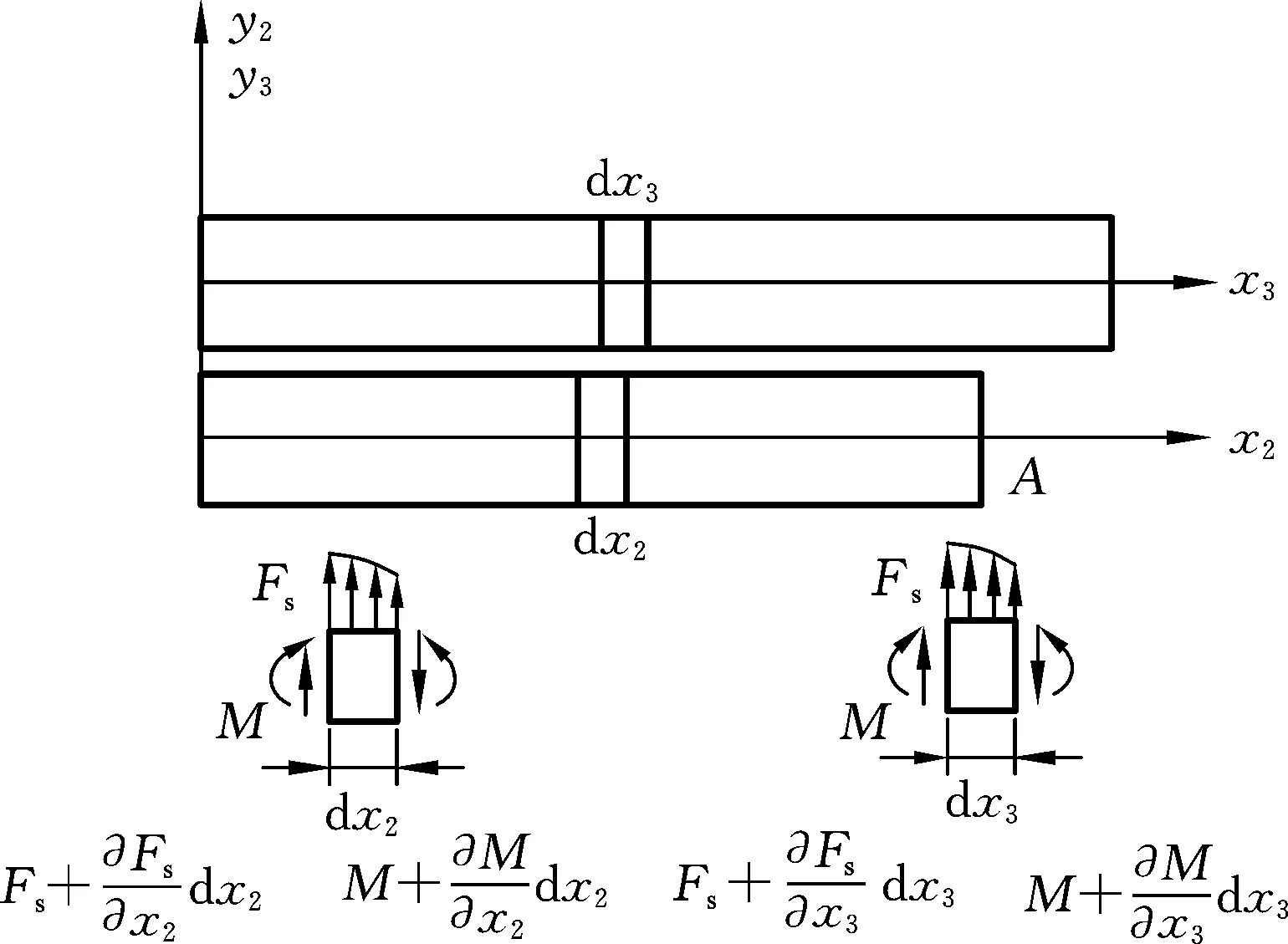
圖8 驅動梁和基座梁動力學模型
在驅動梁中,取微元dx2為研究對象,建立動力學方程:
(19)
以右截面上任一點為矩心建立平衡方程:
(20)

(21)
設式(21)中方程解的形式為
y2(x2,t)=η(x2)q(t)
(22)
將式(22)代入式(21)導出
η(4)(x2)-β2η(x2)=0
(23)
則式(23)的通解,即驅動梁的模態函數為
η(x2)=C1cos(βx2)+C2sin(βx2)+
C3sinh(βx2)+C4cosh(βx2)

其中,系數Ci(i=1,2,3,4)可由邊界條件確定,從而可以得到無窮多個固有頻率ωi(i=1,2,…)及對應的模態函數ηi(i=1,2,…)。
在基座梁中,取dx3單元體為研究對象,微元體沿y3方向的動力學方程為
(25)
微元體滿足力矩平衡條件,力矩平衡方程為
(26)
上述方程與驅動梁動力學方程一致,故可得簡化后的彎曲振動方程:
(27)
將式(27)的解分離變量,把解的形式寫成
y3(x3,t)=ψ(y)q(t)
(28)
將式(28)代入式(27),導出
ψ(4)(x3)-β4ψ(4)(x3)=0
(29)
式(29)的通解,即基座梁的模態函數為
ψ(x3)=D1cos(βx3)+D2sin(βx3)+
D3sinh(βx3)+D4cosh(βx3)

通過邊界條件可確定式(30)中系數Di(i=1,2,3,4),進而得到固有頻率ωi(i=1,2,…)及對應的模態函數φi(i=1,2,…)。
2.4邊界條件和連續條件
由驅動機構分離后各段的邊界條件和連續條件,可知以下關系式:
(1)壓電堆y=0處為固定端,此處軸向位移為零,即
φp(0)=0
(31)
(2)支撐梁x1=0處為卷簧和鉸鏈,撓度為零,轉角不為零,即
(32)
(3)驅動梁x2=0和基座梁x3=0處為自由端,彎矩和剪力均為零,即
(33)
(4)基座梁x3=l4處為彈性約束,邊界條件為
(34)
(5)壓電堆y=lnp和驅動梁x2=l3結合處,有
(35)
(6)支撐梁x1=l1和驅動梁x2=l2結合處,有
(36)
(7)驅動梁與基座梁通過螺栓固連,螺栓位置在l5、l6處,有
(37)
3 結果分析
3.1固有頻率及模態分析
驅動機構結構參數見表1,將參數代入連續條件得出系統的固有頻率及振型,不同材料對應的固有頻率見表2。圖9~圖11所示為前3階固有頻率對應的振型,且振型圖中標出了l5、l6及l2位置處的位移值。
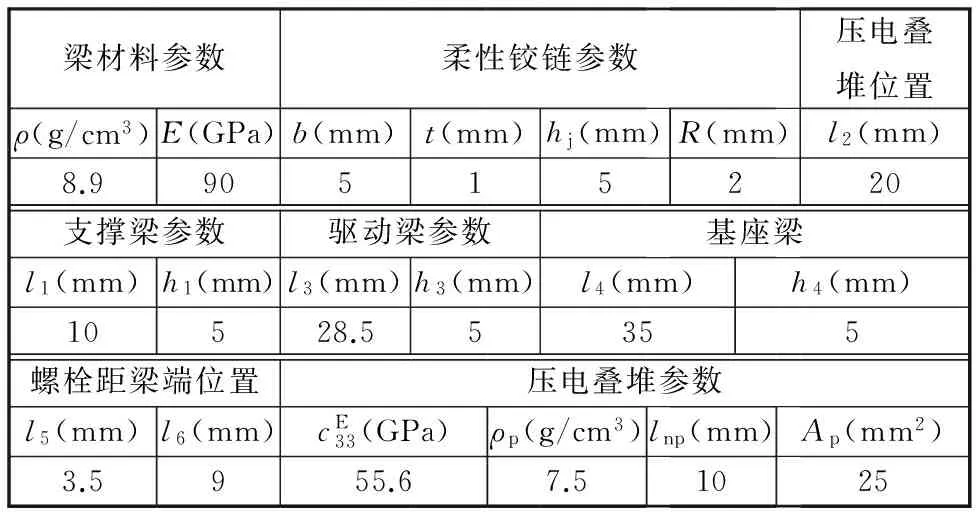
表1 結構參數
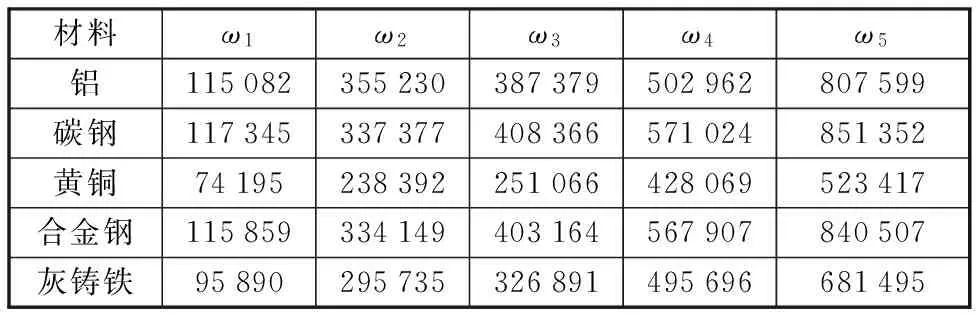
表2 不同材料對應的固有頻率 rad/s
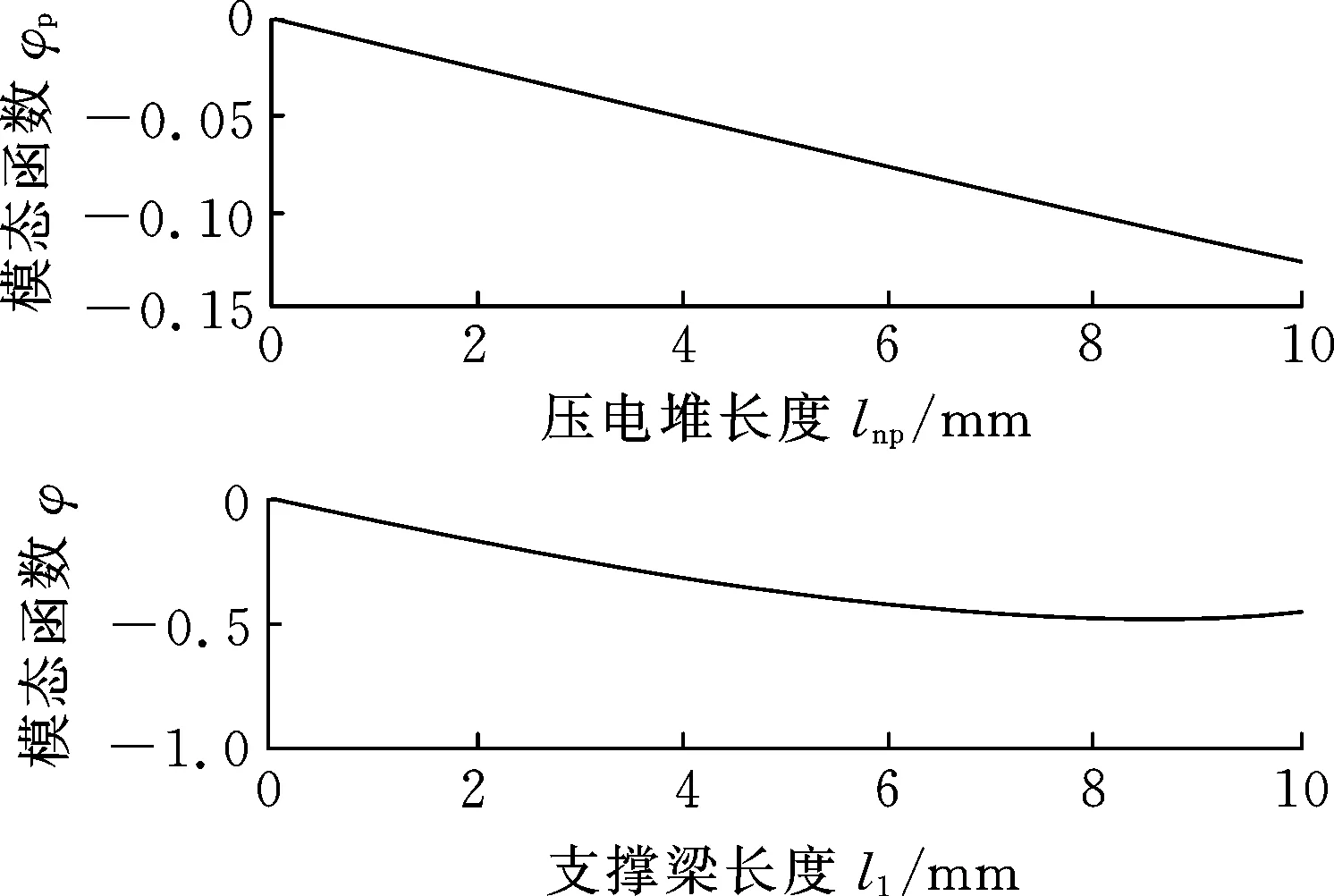
(a)壓電堆和支撐梁振型
(b)驅動梁和基座梁振型圖9 驅動機構1階振型
由表2和圖9~圖11可知:
(1)在5種材料中,黃銅對應的驅動機構同階固有頻率最小,碳鋼對應的同階固有頻率最大。不同材料對應的固有頻率中,2階和3階固有頻率總是相差最小。
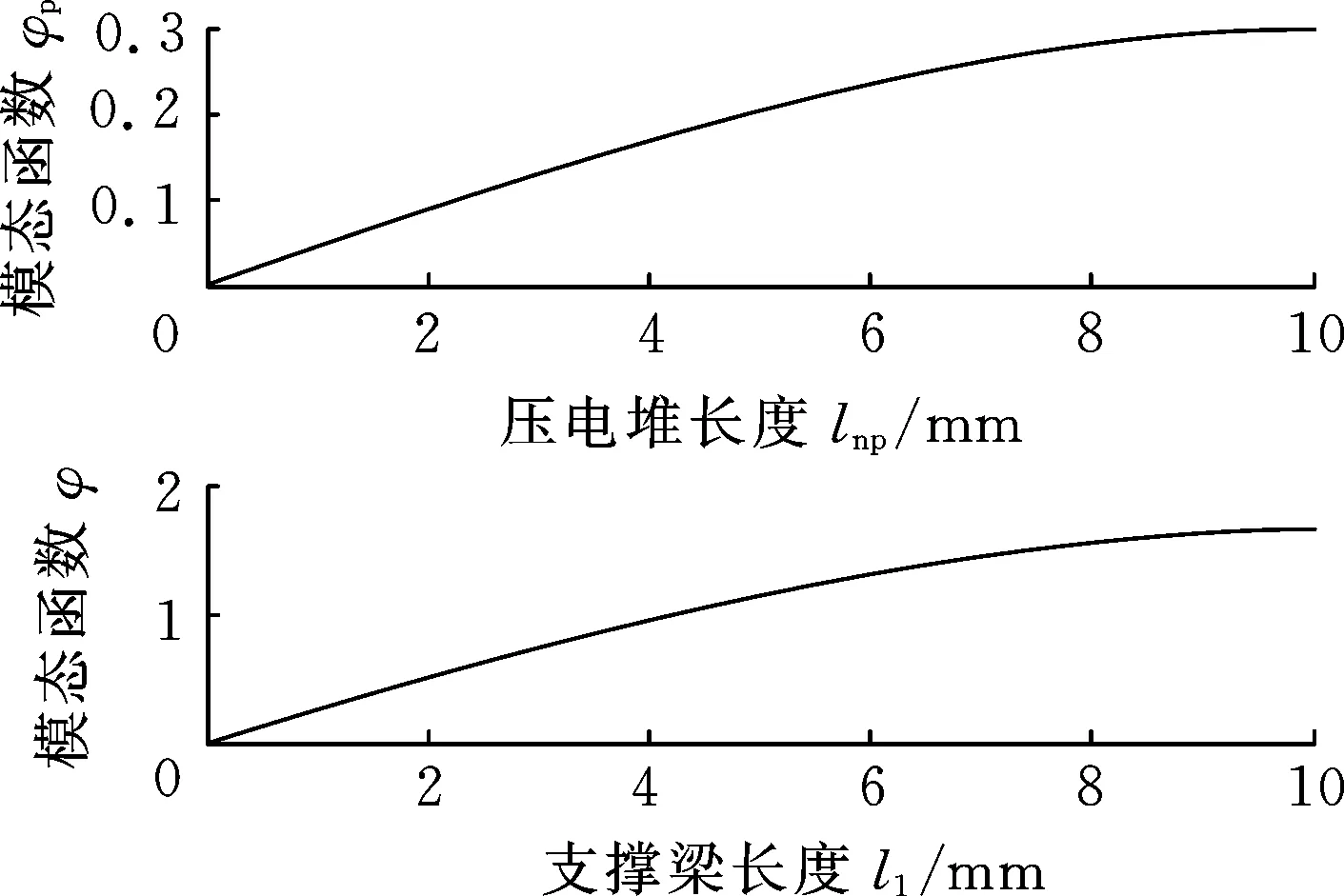
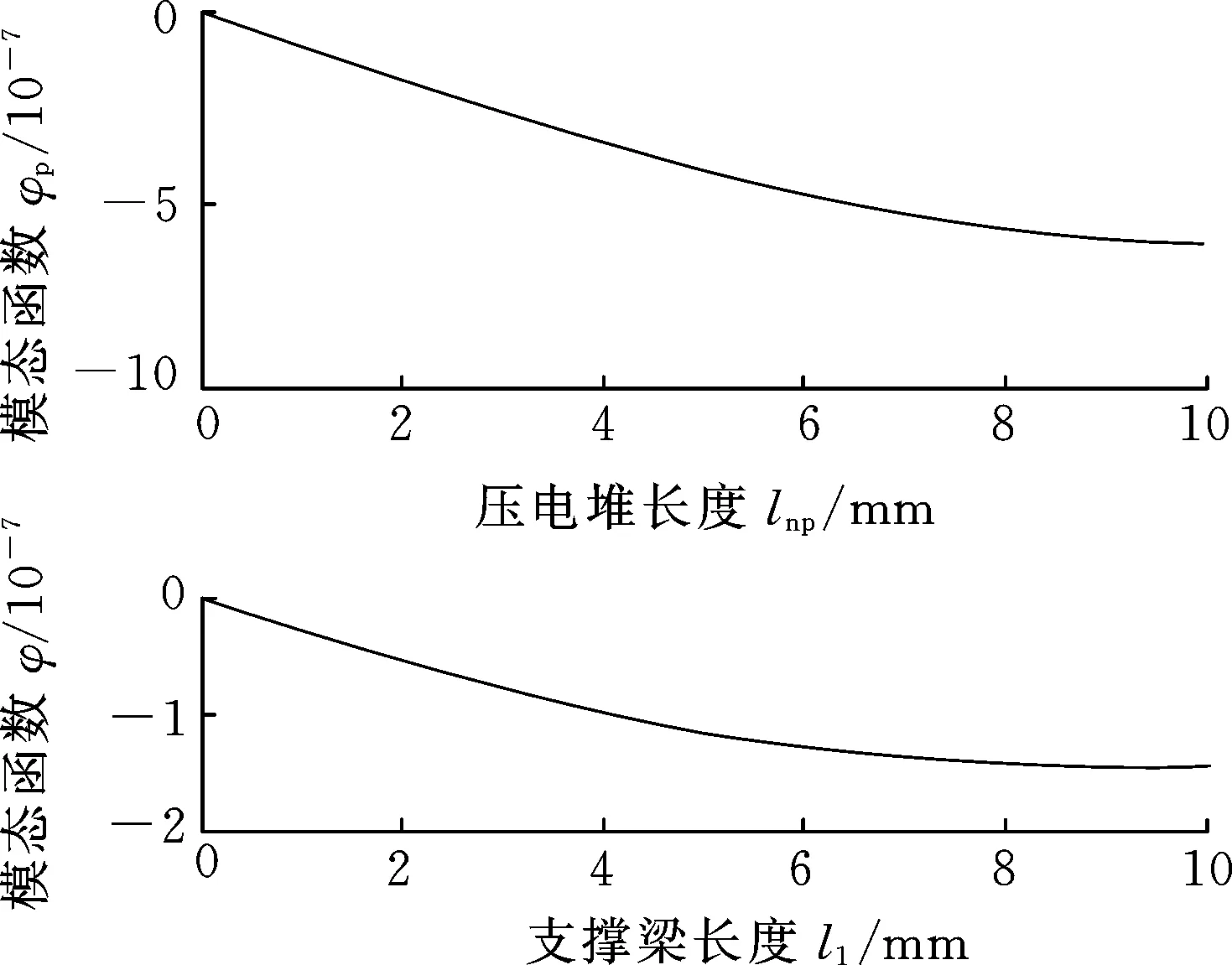
(2)同階振型中,壓電堆的軸向振動和支撐梁對應的鐵摩辛柯梁的彎曲振動較弱,而驅動梁和基座梁對應的歐拉伯努利梁的彎曲振動現象較明顯。這是因為壓電堆和支撐梁都是截面與長度尺寸比值較大而不易產生振動。
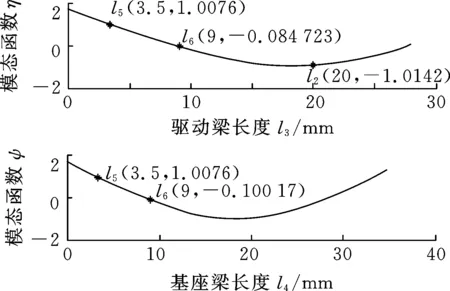
(a)壓電堆和支撐梁振型
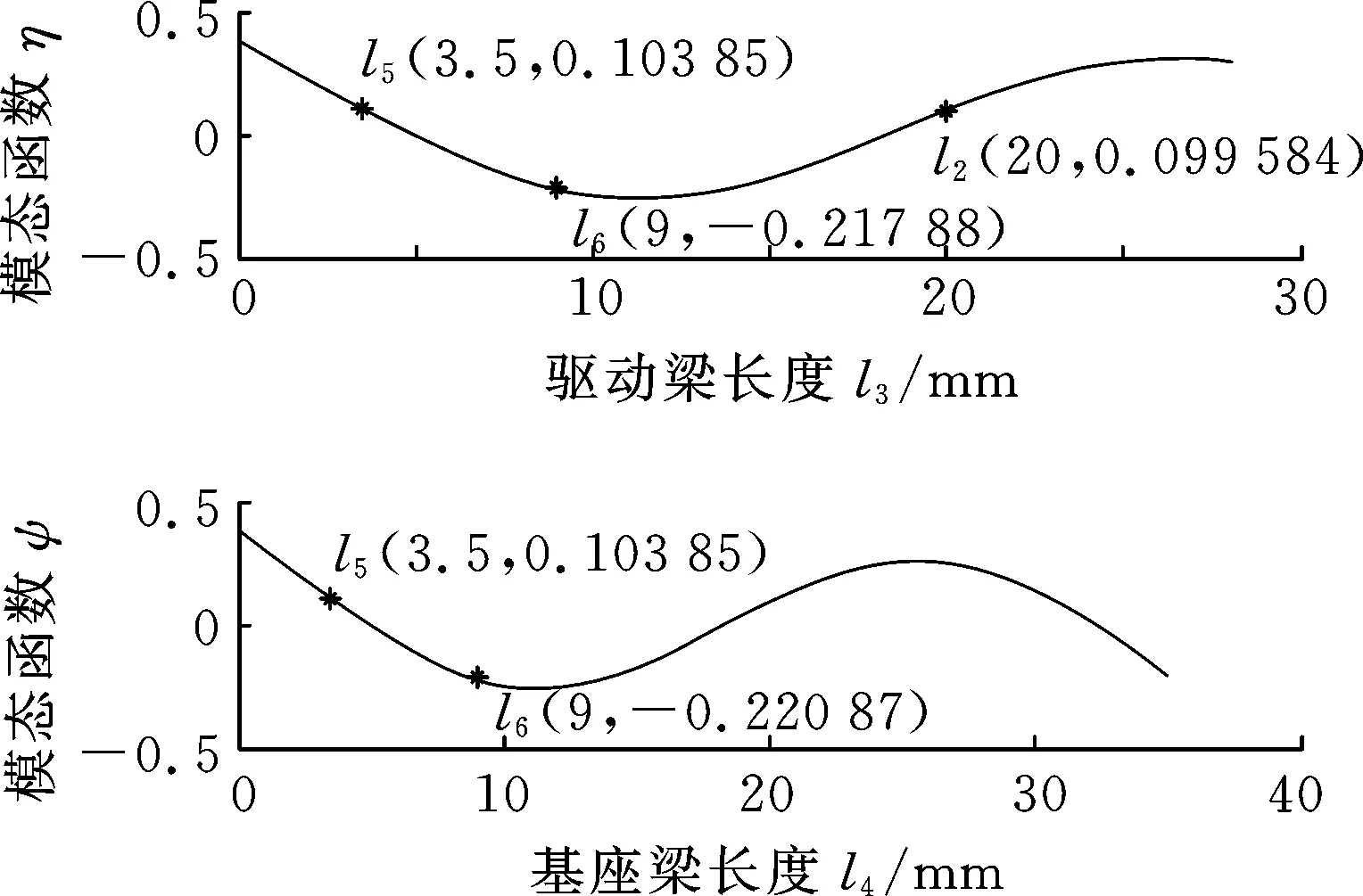
(b)驅動梁和基座梁振型圖10 驅動機構2階振型
(a) 壓電堆和支撐梁振型
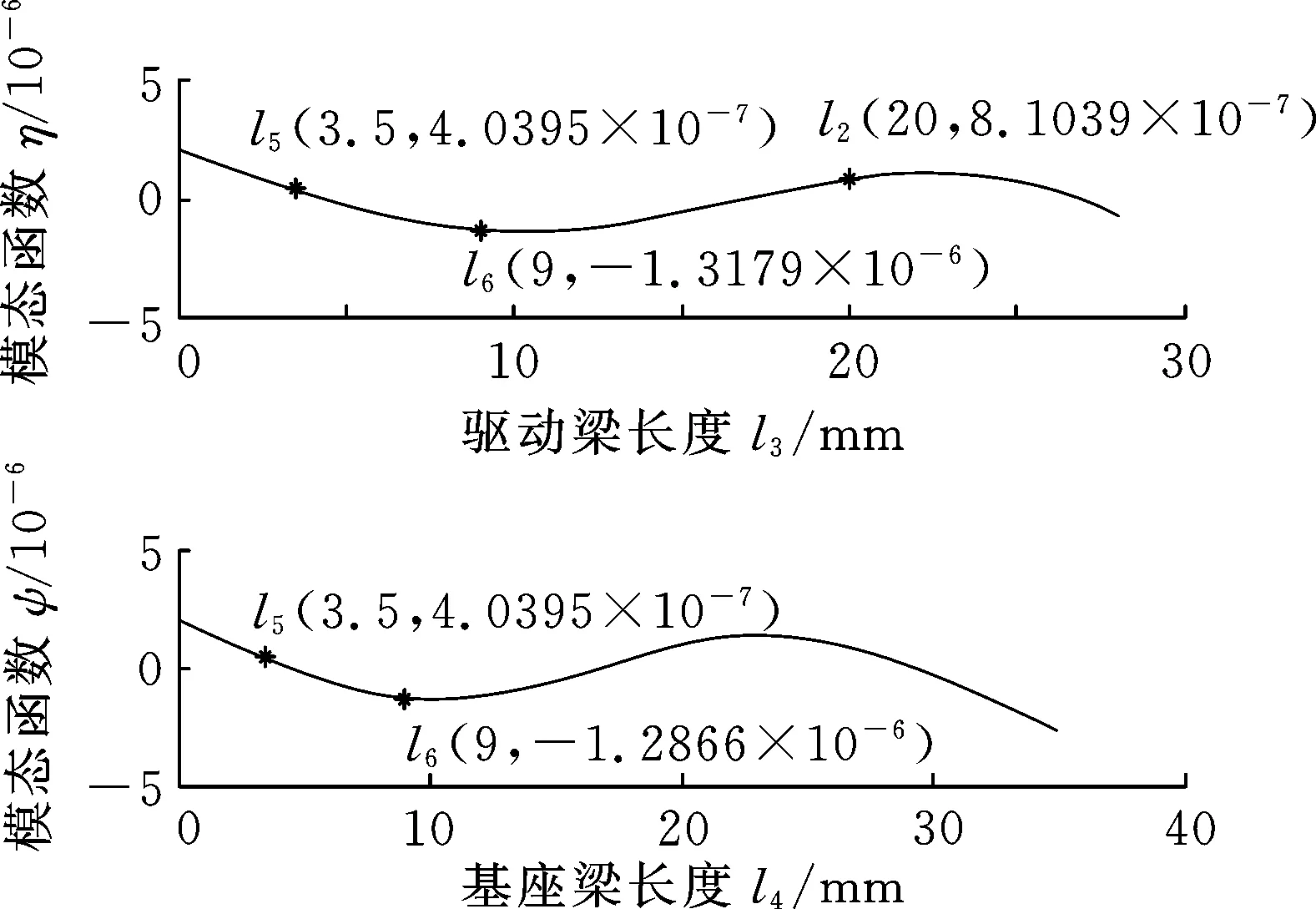
(b)驅動梁和基座梁振型圖11 驅動機構3階振型
(3)同階固有頻率中,驅動梁和基座的l5和l6處的位移值分別相同,這與l5和l6處因螺栓連接而具有相同位移的假設是一致的。
3.2系統參數對結構的影響規律
分別選取梁高度h(包括h1、h3、h4),鉸鏈寬度hj,各梁段長度l1、l3、l4及螺栓作用位置l5為目標參數,作固有頻率隨參數變化曲線,如圖12~圖17所示,可知:
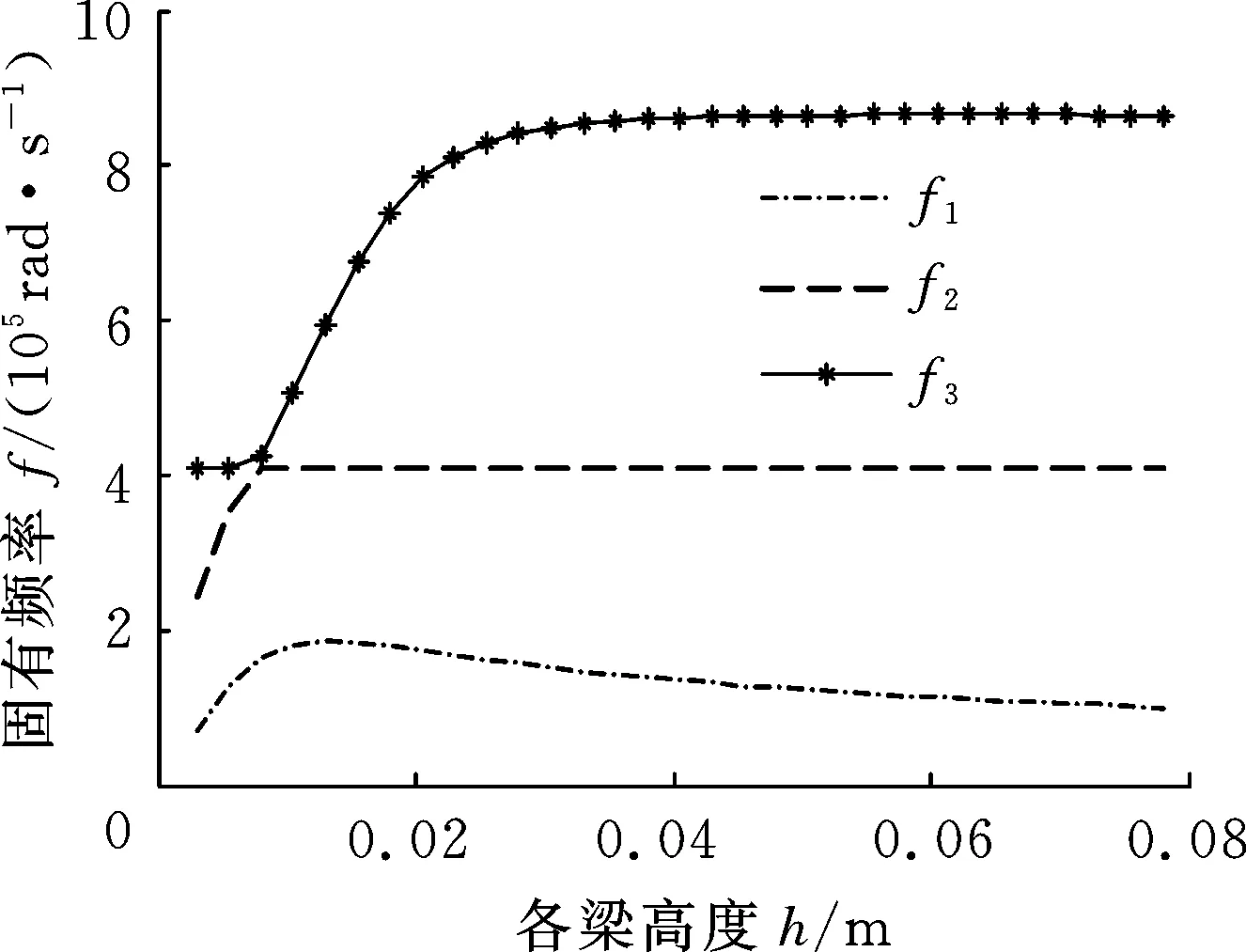
圖12 固有頻率隨h變化情況
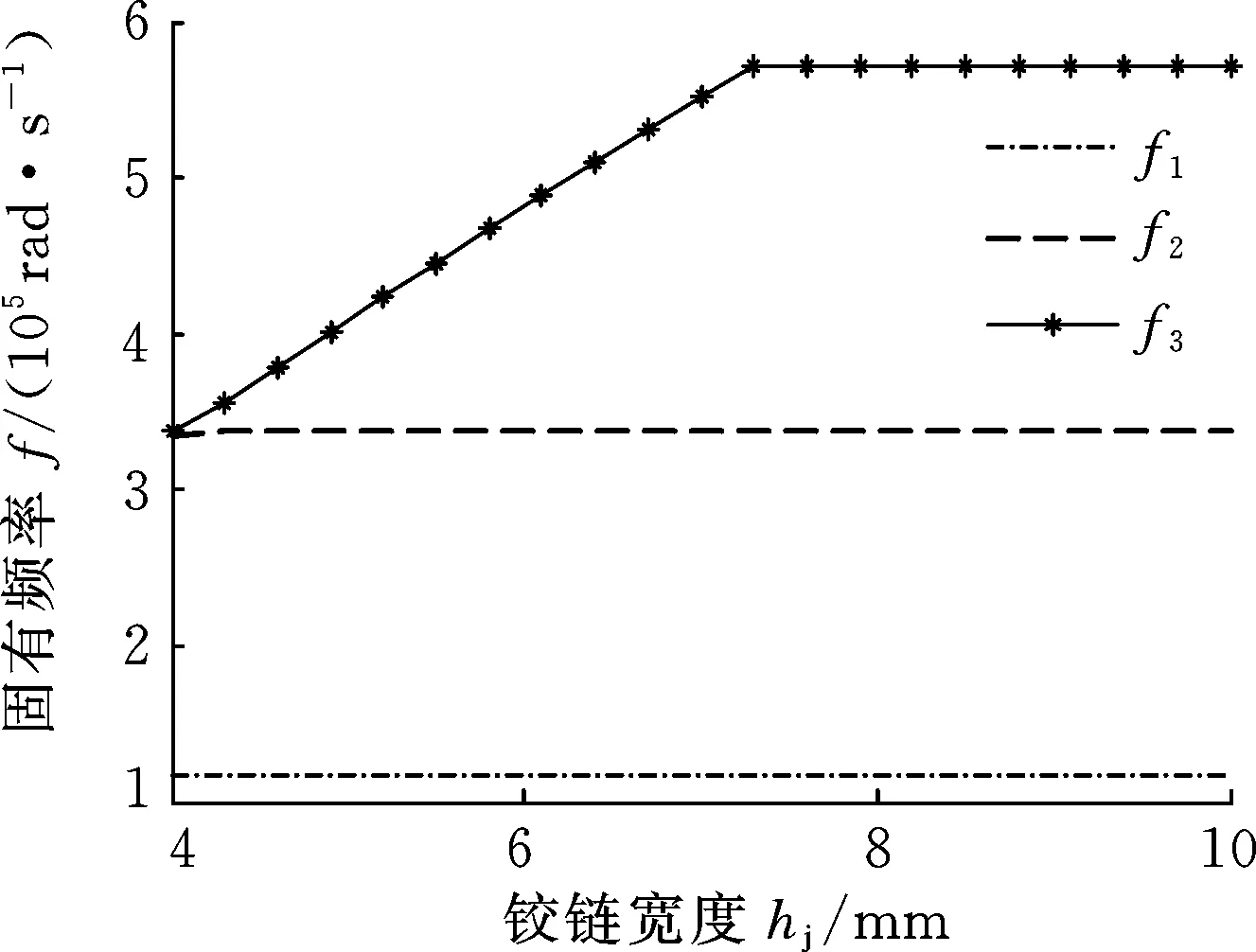
圖13 固有頻率隨hj變化情況
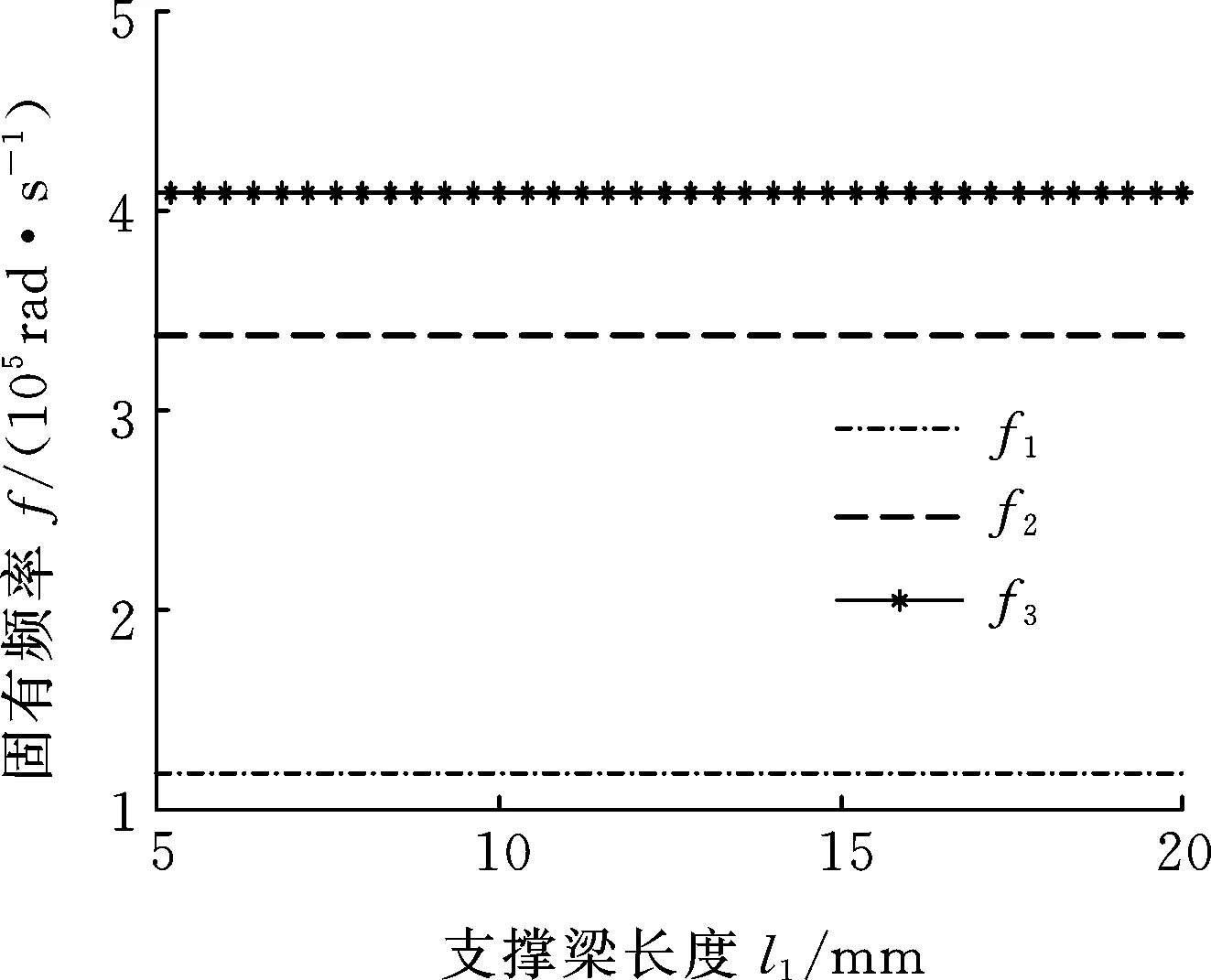
圖14 固有頻率隨l1變化情況
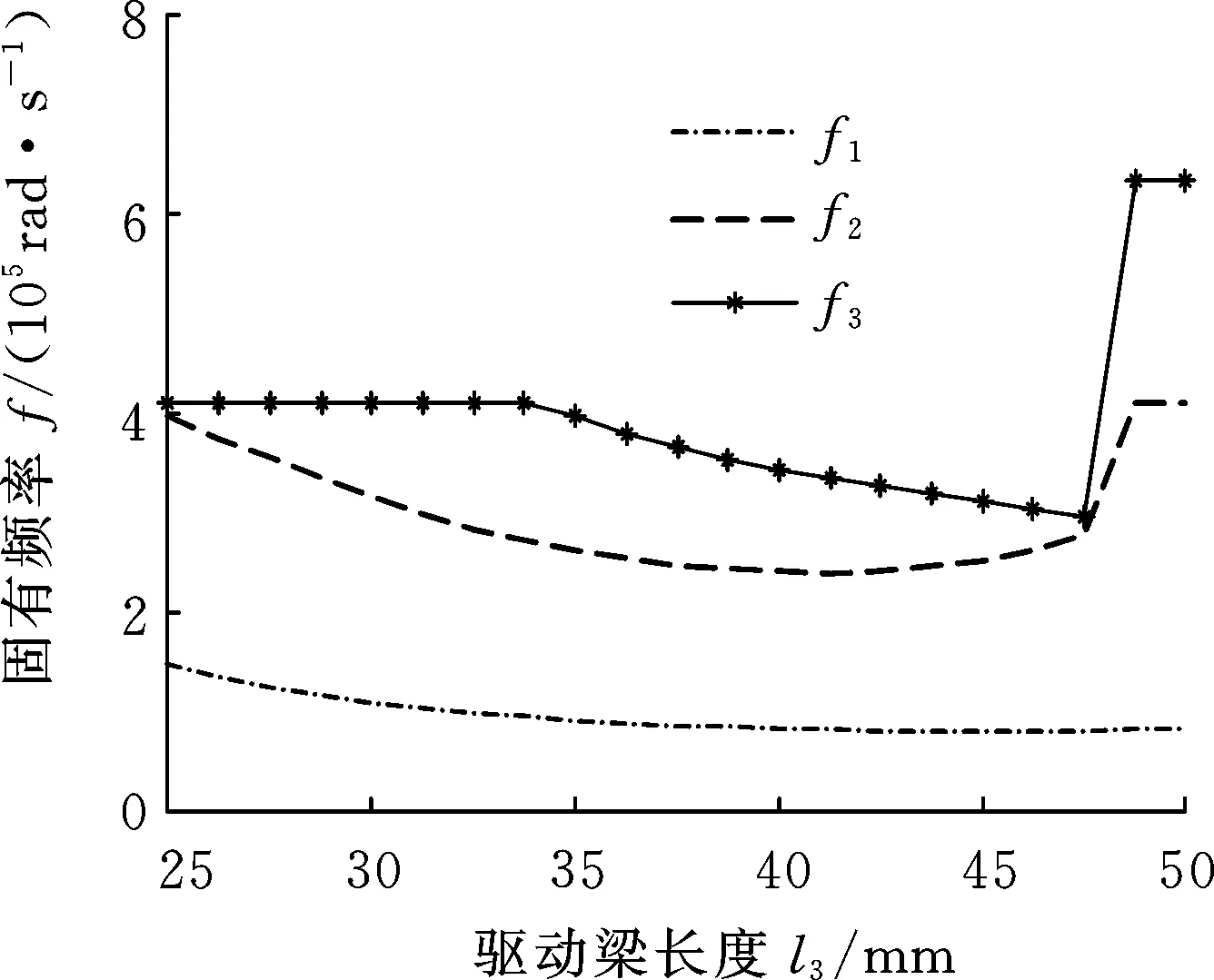
圖15 固有頻率隨l3變化情況
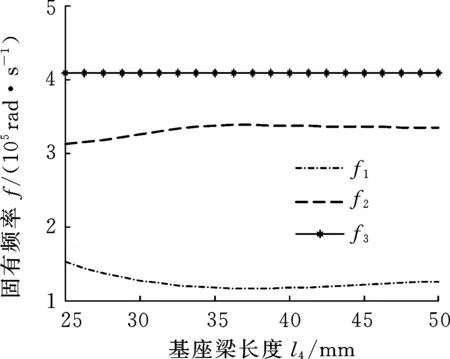
圖16 固有頻率隨l4變化情況
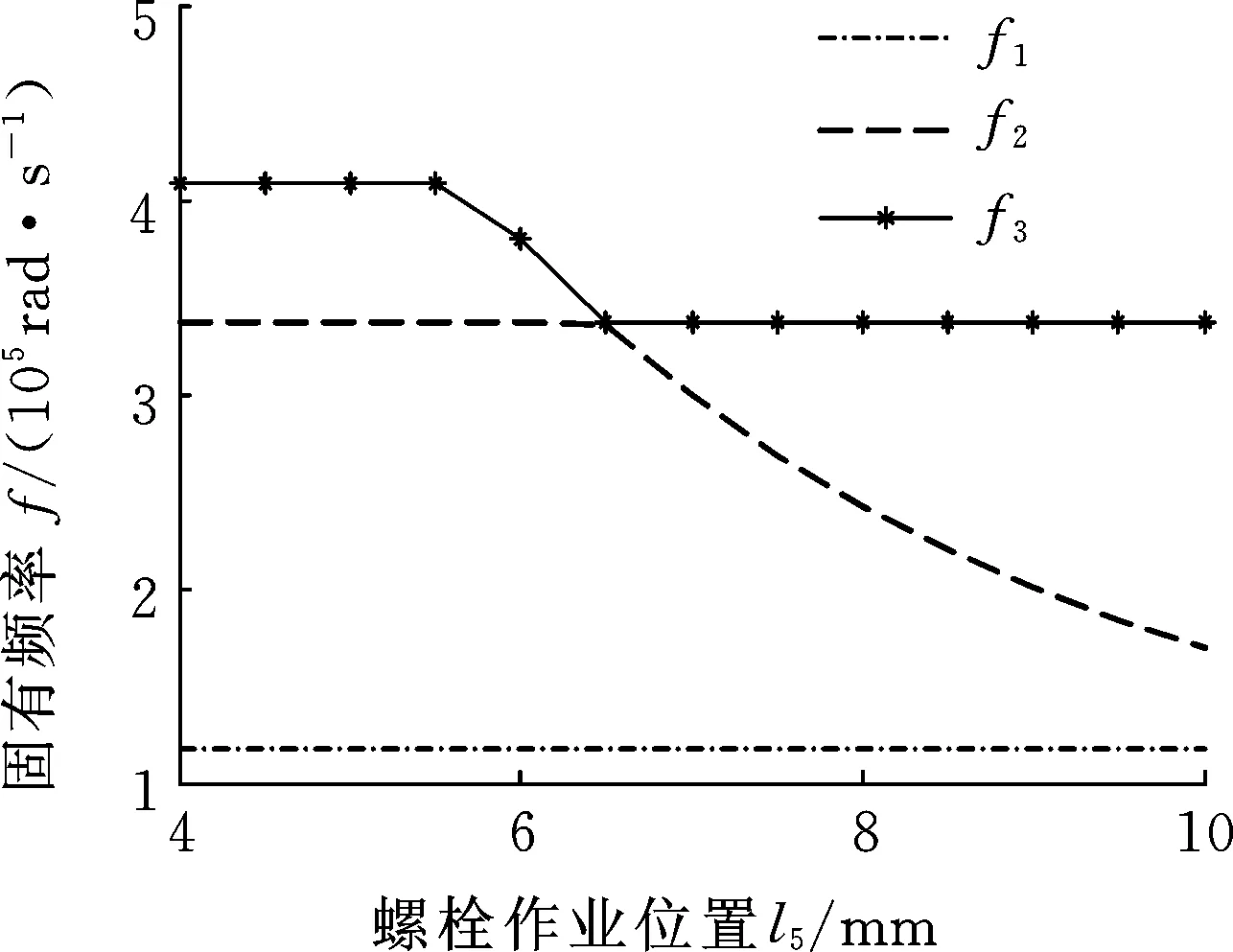
圖17 固有頻率隨l5變化情況
(1)隨h的增大,1階固有頻率f1先增大后減小,2階和3階固有頻率f2、f3先增大而后趨于平穩。這是由于當梁高度h較小時,各梁段皆已振動,隨梁高度的增大固有頻率增大;當梁高度h繼續增大時,鉸鏈相對各梁段更易發生振動,故系統的固有頻率變化不大。
(2)隨鉸鏈寬度hj的增大,1階和2階固有頻率不變,3階固有頻率先增大后不變。
(3)隨l1的變化,固有頻率基本沒有發生變化,這是由于支撐梁是鐵摩辛柯梁,其主振動頻率遠大于驅動梁和基座梁的主振動頻率,故支撐梁長度的改變對驅動機構低階固有頻率的改變影響很小。
(4)隨l3的變化,2階和3階固有頻率變化較大,且固有頻率值在3階固有頻率時出現了突變,這是由于l3對驅動梁會產生直接影響,且驅動梁相對容易振動,故較低頻率容易隨l3發生變化,并且隨l3的增大到某一值使得振型發生變化。
(5)l4變化時,1階和2階固有頻率發生局部變化,而3階固有頻率沒有發生變化,這是由于基座梁相對于驅動梁更加容易振動,故其主振動頻率是最低的。
(6)當l5增大并且l6與l5相對距離不變時,2階和3階固有頻率在某一區間先不變后減小,而1階和2階頻率都不變。
4 結論
(1)選用碳鋼材料可以增大驅動機構的固有頻率。
(2)驅動梁和基座梁的振動比壓電堆和支撐梁的振動顯著。
(3)參數h、l3對驅動機構系統總體固有頻率的影響較大。
(4)理論分析為新型旋轉尺蠖壓電電機的樣機改進和實驗研究打下了理論基礎。
[1]Richard J C.Nano-scale Measurements and Manipulation [J]. Journal of Vacuum Science and Technology: B, 2004, 22(4): 1609-1635.
[2]Duong K, Garcia E.Design and Performance of a Rotary Motor Driven by Piezoelectric Stack Actuators[J].Japanese Journal of Applied Physics,1996,35:6334-6341.
[3]Itatsu Y, Torii A, Ueda A.Inchworm Type Microrobot Using Friction Force Control Mechanisms[C]//2011 International Symposium on Micro-nano Mechatronics and Human Science (MHS). Nagoya, 2011:273-278.
[4]趙淳生. 世界超聲電機技術的新進展[J].振動、測試與診斷,2004,24(1):1-5.
Zhao Chunsheng. Recent Progress in Ultrasonic Motor Technique[J].Journal of Vibration,Measur-ement& Diagnosis,2004,24(1):1-5.
[5]Bernard Y,Christen J L,Hernandez C,et al.From Piezoelectric Actuator to Piezomotor[J].Piers Online,2001,7(5):416-420.
[6]Sun Xiantao, Chen Weihai, Zhang Jianbin, et al. A New Novel Piezo-driven Linear-rotary Inchworm Actuator[J]. Sensors and Actuators A:Physical,2015, 224:78-86.
[7]Li Jianping,Zhao Hongwei,Shao Mingkun,et al.Design and Experiment Performance of an Inchworm Type Rotary Actuator[J].Review of Scientific Instruments,2014,85: 085004.
[8]Tomoyuki Y, Ryuichi Y,Masashi I,et al.Applica-tion of Micro Piezo Actuator (SIDM)—Lens Drive for Mobile Phone Camera[J].Journal of the Japan Society for Precision Engineering,2009,75(1):144-145.
[9]Kihwan K,Nahmgyoo C,Woojin J.The Design and Characterization of a Piezo-driven Inchworm Linear Motor with a Reduction Mechansim[J].JSME International Journal, Series C: Mechanical Systems, Machine Elements and Manufacturing,2004,47(3):803-811.
(編輯陳勇)
Free Vibration Analysis of Driving Mechanisms of a Rotary Inchworm Piezoelectric Motor
Xing JichunZhang NanLi Chong
Yanshan University,Qinhuangdao,Hebei,066004
A novel rotary inchworm piezoelectric motor was proposed herein. Considering the driving mechanism of the rotary inchworm piezoelectric motor was a continuous system, the dynamics model of the driving system was presented. The natural frequencies and mode function of the drive mechanism of a prototype were solved by using the dynamics model. The influences of system parameters on the natural frequency of the driving mechanism were analyzed. All the conclusions lay a theoretical foundation for the design of the rotary inchworm piezoelectric motors.
rotary inchworm;driving mechanism;modal analysis;piezoelectric motor
2015-11-16
燕山大學青年教師自主研究計劃課題資助項目(13LGB002)
TH113.1DOI:10.3969/j.issn.1004-132X.2016.15.002
邢繼春,男,1983年生。燕山大學機械工程學院講師。主要研究方向為壓電電機驅動與控制。發表論文10余篇。張楠(通信作者),男,1981年生。燕山大學機械工程學院副教授。李沖,男,1988年生。燕山大學機械工程學院博士研究生。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00