溫躍層剖面觀測水下滑翔器控制系統設計
2016-09-14 09:17:40王艷召孫秀軍
電子設計工程 2016年2期
王艷召,鄧 云,孫秀軍,姜 飛
(國家海洋技術中心 天津 300112)
溫躍層剖面觀測水下滑翔器控制系統設計
王艷召,鄧 云,孫秀軍,姜 飛
(國家海洋技術中心 天津 300112)
根據溫躍層剖面觀測水下滑翔器多任務并行處理的特性,采用意法半導體公司的高性能、低功耗的ARM Cotex-M4內核的STM32F429為主控芯片,移植嵌入式實時操作系統μC/OS-II,設計實現了溫躍層剖面觀測水下滑翔器的軟硬件綜合控制系統。實現了水下滑翔器自主運行過程中的下潛、水下懸停、上升以及海洋水文信息的采集與存儲,并通過銥星通信實現溫躍層剖面觀測水下滑翔器的關鍵數據與控制命令的遠程傳輸。同時,引入擬階梯函數分析海洋溫躍層參數特征,設計開發了溫躍層剖面觀測水下滑翔器綜合控制算法,實現溫躍層剖面觀測水下滑翔器的自主滑翔運動控制、測量路徑規劃等功能。
水下滑翔器;實時操作系統;控制系統;擬階梯函數;溫躍層特征
水下滑翔器是一種帶有固定翼的由浮力引擎驅動的水下機器人。它通過浮力調節系統來調整系統的排水量,使水下滑翔器交替出現正浮力與負浮力狀態;依靠其內部的俯仰執行機構改變機身的質量分布,以改變滑翔器的運動姿態。由于其利用凈浮力和俯仰角的調整來獲得推進力,能源消耗極小,因此具有高機動性、高效率、續航力大等特點[1]。自1989年美國科學家Henry Stommel提出水下滑翔器的概念至今,國外已經將水下滑翔器技術應用與海洋觀測、科學考察以及軍事海洋任務。2006年,Washington大學研發的水下滑翔機Deepglider樣機,采用碳纖維耐壓殼體,潛深可達6 000 m[2]。我國對于水下滑翔器的研究開始較晚,與國外相比還有一定的差距,因此開展自主研發水下滑翔器項目對于海洋維權、科學考察、氣象監測等具有重要的意義。
文中所研究的溫躍層剖面測量水下滑翔器是對海洋溫躍層進行有針對性測量的海洋觀測平臺。海洋溫躍層對水下通信和聲波探測有著重要的影響,將水下滑翔器應用于海洋溫躍層觀測,有助于提高海洋環境觀測的空間和時間觀測密度,對于海洋科考、環境保護以及軍事海洋環境保障具有重要的意義[3]。文章以溫躍層剖面測量水下滑翔器為研究對象,具體介紹了水下滑翔器的嵌入式軟硬件綜合控制系統與溫躍層控制算法的實現方法。
1 控制系統功能組成
溫躍層剖面觀測水下滑翔器在執行海洋觀測任務過程中,為了保證其運動姿態的精確控制,通常是由一系列的組合動作并發執行,完成運行狀態的轉換與姿態調整。系統采用嵌入式實時操作系統控制方案,充分發揮實時操作系統的確定性響應特性,以滿足溫躍層剖面觀測水下滑翔器精確控制的要求。圖1所示為水下滑翔器控制系統結構框圖。
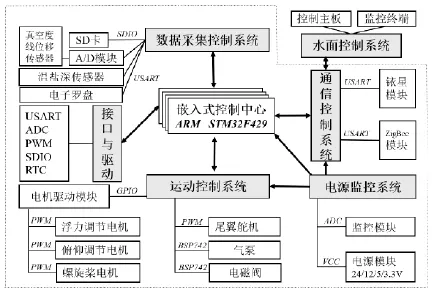
圖1 水下滑翔器控制系統結構框圖Fig.1 Structure diagram of underwater glider control system
系統由水面控制系統和水下控制系統兩部分組成。水下控制系統由嵌入式控制中心、數據采集控制系統、通信控制系統、運動控制系統、電源監控系統以及接口與驅動構成。其中嵌入式控制中心采用ST推出的ARM Cotex-M4內核的32位微控制器STM32F429,該處理器低功耗與節能機制符合滑翔器控制系統長續航能力的需求;片上集成FPU和DSP運算指令集提高了滑翔器控制系統運算處理能力;其對嵌入式實時操作系統的支持滿足了滑翔器控制系統多任務實時處理的需求。因此,選擇ARM Cotex-M4內核微控制器作為水下滑翔器控制系統的嵌入式控制中心處理器,對增強水下滑翔器信息處理性能具有重要的實用意義。
2 控制系統硬件設計
2.1通信控制系統
通信控制系統包括銥星通信模塊和ZigBee無線傳輸模塊。銥星通信模塊采用Iridium短報文透明傳輸模塊,該模塊具有較低的功耗,通過RS232接口與控制中心連接,通過發送相應的控制指令,實現水下滑翔器在海洋觀測任務過程中的數據傳輸、遠程控制與海洋定位。ZigBee模塊采用低電壓型無線傳輸模塊,通過TTL電平的串口與控制中心連接。模塊支持大數據量發送,且不限數據包長度,最高數據傳輸速率可達38400Bit/s。同時支持長周期和短周期的無線喚醒,可以最大限度地節約電池電量,延長使用壽命,非常適用于水下滑翔器在水面上的狀態測控。在執行海洋觀測任務過程中,兩種通信方式優勢互補,靈活使用。
2.2水面控制系統
水面控制系統主要由控制主板和監控終端組成。水上控制系統通過銥星監控終端接收銥星傳回的數據以及定位信息,利用Google Earth軟件模擬水下滑翔器運行軌跡,并通過命令發送終端實時發送水下滑翔器控制命令,實現對滑翔器的姿態調整與航跡修正。水面控制主板由開關模塊、狀態指示模塊以及ZigBee無線通信模塊構成,用以實現水下滑翔器的調試、布放、回收以及狀態監測控制等功能。
2.3數據采集控制系統
水下滑翔器作為水下運動觀測平臺,根據觀測任務的不同可以搭載溫鹽深(CTD)、溶解氧、PH值、葉綠素、放射性檢測等不同類型的海洋傳感器,以實現滑翔器對特定海域的環境數據的測量。本項目中溫躍層剖面觀測水下滑翔器搭載了溫鹽深(CTD)傳感器,在水下滑翔器鋸齒狀運動過程中,可以對溫躍層信息敏感區進行加密觀測[4],以獲得高分辨率的海洋溫躍層數據,并將數據存儲在大容量SD卡中。系統采用STM32微控制器的SDIO總線擴展大容量SD卡。為增強數據可讀性,便于后期進行數據處理,移植了FATFS文件系統。
數據采集控制系統還包括電子羅盤傳感器和A/D采集模塊。其中電子羅盤傳感器用來獲得水下滑翔機的姿態角,A/D采集模塊用以采集水下滑翔器艙內真空度、俯仰電池和油泵活塞的線位移。A/D模塊采用ADI的8通道16位精度的同步采樣芯片AD7606,其片上集成模擬輸入箝位保護、二階抗混疊濾波器、跟蹤保持放大器、16位電荷在分配逐次逼近型ADC內核、數字濾波器、2.5 V基準電壓源及緩沖、高速串行和并行接口。另外,該芯片采用5 V單電源供電,不需要正負電源,并支持正負10V的雙極性信號輸入,其每個通道的采樣速率最高可達200ksps。高精度與高集成度的AD芯片對于實現水下滑翔器的運動姿態的精確控制尾翼氣囊的充放氣程度以及檢驗水下滑翔器的密封性具有重要的保障作用。
2.4運動控制系統
水下滑翔器的驅動力來源于自身的靜浮力,系統通過控制浮力調節機構、俯仰調節機構以及輔助調節機構來周期性調整水下滑翔器的運動姿態,完成如圖2示的基本動作。
系統通過電機驅動器來控制浮力調節電機、俯仰調節電機和螺旋槳電機的啟動、停止和正反轉,并用PWM控制電機的轉速。浮力調節機構通過控制電機的轉動改變柱塞的位置,來改變水下滑翔器的排水量,進而獲得上升及下潛的動力。系統采用高精度拉線式位移傳感器來測量柱塞移動的位移(d),通過標定有效的量程來控制滑翔器的整體浮力的變化。
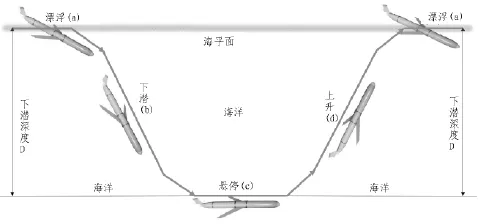
圖2 水下滑翔器動作執行示意圖Fig.2 Diagram of underwater glider's behavior
俯仰調節機構是通過電機帶動配重塊(滑動電池組)移動[5],通過改變配重的位置來改變水下滑翔器的重心位置,從而控制水下滑翔器的俯仰姿態。系統采用高精度直線位移傳感器來測量配重塊的移動位移(1),并采用精密電子羅盤傳感器來測量水下滑翔器的俯仰角(α)。俯仰角的大小決定了水下滑翔機單周期滑翔距離的長短,俯仰角越大,其單循環滑翔距離越短。對于溫躍層剖面觀測水下滑翔機而言,單周期滑翔距離越短,所采集的躍層剖面信息越接近實際值。因此在溫躍層分布區域,較大的俯仰角有利于溫躍層數據采集的有效性。
2.5電源監控系統
由于水下滑翔器系統各模塊的電壓不同,為了保證電源模塊與各個模塊及控制系統的安全性,避免某一電源模塊故障對控制系統造成不可恢復性損害,采用電源板與系統板分立式設計方案,如圖3為電源監控系統設計方案框圖。
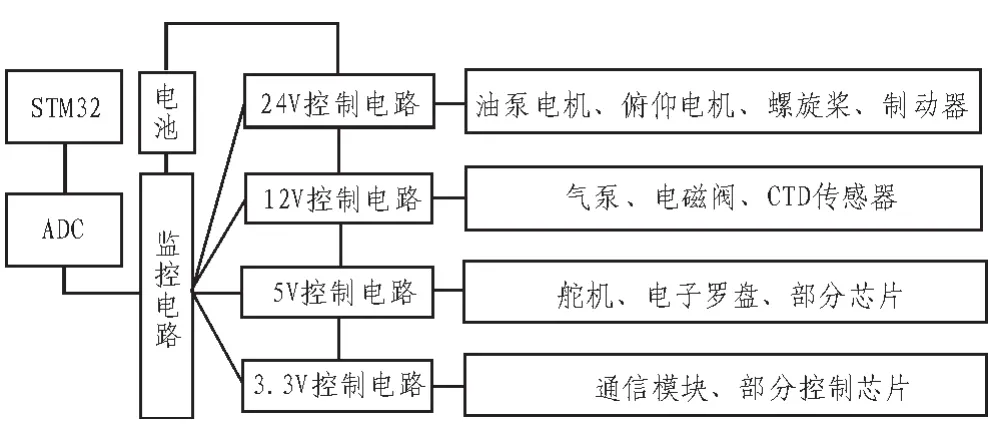
圖3 電源監控系統設計方案框圖Fig.3 Structure diagram of power monitoring system
安全穩定的電源模塊是水下滑翔器控制系統正常工作的前提,系統采用片上集成的12位精度的ADC,通過分壓電路來實時監測水下滑翔器電池組及各模塊的電壓值。當電量不足或者電壓電路故障時,提供電量報警和故障定位服務,并實時啟動應急保護措施。
3 控制系統軟件設計
3.1系統算法
水下滑翔器在執行溫躍層檢測過程中,溫躍層參數計算是實時處理的,水下滑翔器根據溫躍層的參數特性,調整運行航跡和數據采樣速率。在分析溫躍層特征時,通常采用躍層深度、躍層強度、躍層厚度等參數來描述躍層現象[6]。根據溫躍層的定義和溫度垂直分布特性,將海水理想劃分為上均勻層、躍層和下均勻層垂直分布結構[7],如圖4所示。
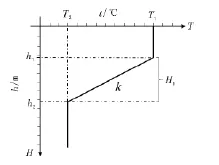
圖4 溫躍層垂直分布示意圖Fig.4 Diagram of thermocline profile
葛人峰等[8]提出了一種用3條線段構成的擬階梯函數擬合溫躍層垂直剖面,求解溫躍層特征參數的計算方法。根據圖4中標示的參數得到如下計算公式。
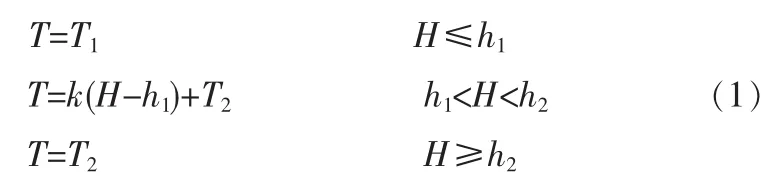
式中T為擬合溫度值;H為下潛深度;h1為溫躍層上界深度;h2為溫躍層下界深度;T1為上均勻層平均溫度;T2為下均勻層平均溫度;k為躍層強度,易知溫躍層厚度H0=h2-h1。然后用最小二乘法確定(1)式中的躍層上下界參數h1和h2以及躍層強度k,即使其均方差達到最小,計算如下式所示。

式中T為實際測得的溫度,T′為由式 (1)計算得到的溫度,n為層數。在上述理論的基礎上,可以得出水下滑翔器的下潛深度D、俯仰角α及其所搭載的海洋探測傳感器的采樣頻率fsensor與溫躍層參數之間的函數關系,如下式所示,
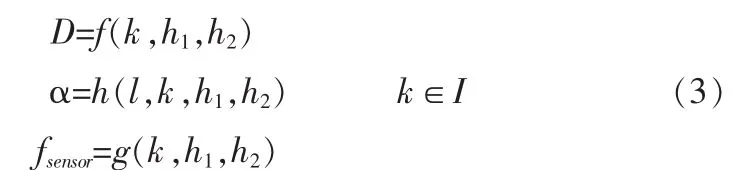
其中I為探測水域的溫躍層強度范圍。根據上述理論水下滑翔器在執行海洋溫躍層檢測跟蹤時的控制算法如下。1)第一個運動周期采用較大的俯仰角航行,以獲得較大范圍的海洋水文信息;2)第二個運動周期及以后下潛深度D隨溫躍層下界深度變化而做出調整;3)通過增大水下滑翔器的俯仰α來增大溫躍層水域的觀測密度;4)通過調整海洋傳感器的采樣頻率fsensor來加強對溫躍層信息的觀測。算法指導下水下滑翔器航行示意如圖5所示。
圖5 水下滑翔器航行示意圖Fig.5 Diagram of underwater glider navigation
3.2軟件框架
控制系統的軟件架構基于嵌入式實時操作系統μC/OSII,按照溫躍層剖面觀測水下滑翔器多任務處理特性設計的。圖6為滑翔器水下控制系統整體軟件結構框圖。
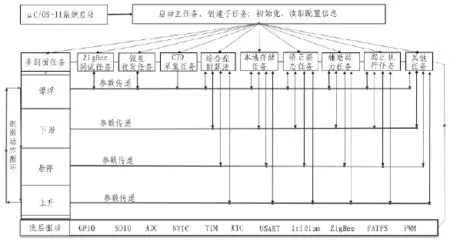
圖6 控制系統整體軟件結構框圖Fig.6 Structure diagram of underwater glider software control system
其工作流程如下所述:溫躍層剖面觀測水下滑翔器布放完成后的狀態是漂浮在水面上,N剖面任務命令下達后,水下滑翔器的尾翼氣囊收縮,同時俯仰調節機構和浮力調節機構調整水下滑翔機姿態為下潛狀態;在發現溫躍層后,調整海洋傳感器的采樣頻率,以獲得可靠的溫躍層特性參數,并實時存儲。在完成第一個滑翔周期的溫躍層信息采集后,水下滑翔器在短暫的懸停狀態后調整為上升狀態。在接近水面時,氣囊充氣以保證水下滑翔器尾部高高翹起,使得安裝在尾翼的通信設備通過衛星與遠程控制終端建立通信連接,實時發送運行的關鍵信息,并接收遠程任務指令,結合溫躍層控制算法繼續航行,直至完成海洋觀測任務。
4 實驗結果
為了測試該控制系統的性能,將搭載該控制系統的溫躍層剖面觀測水下滑翔器布放在渤海近海岸海域,并設定剖面數N=18。圖7(a)中所示為溫躍層剖面觀測水下滑翔器航行深度隨時間的變化曲線圖,由圖中曲線可以看出水下滑翔器下潛深度為5~6 m,在完成了18個剖面動作后漂浮在水面上。圖7(b)中所示為溫躍層剖面觀測水下滑翔器俯仰角隨時間的變化曲線圖,從圖中可以看出水下滑翔器的俯仰角度范圍在正負40度之間變化,實驗表明溫躍層剖面觀測水下滑翔器測試性能良好,具備進一步開發研究的價值。
5 結 論
文中研究了基于意法半導體公司的ARM 32位微控制器STM32F429的嵌入式溫躍層剖面觀測水下滑翔器控制系統,通過分析溫躍層特性設計了水下滑翔器溫躍層剖面觀測控制算法。本文具有以下4個創新點:1)采用高性能、高集成度、低功耗的微控制器作為系統的控制核心,大大增強了水下滑翔器系統的運算處理能力;2)移植嵌入式微型實時操作系統μC/OS-II,實現了復雜多任務的并行處理,提高了系統任務的執行效率與水下滑翔器的綜合性能;3)采用模塊化設計理念設計系統的軟硬件,合理分配資源與空間,提高了系統軟硬件的靈活性與可繼承性能;4)引入溫躍層參數計算算法,設計水下滑翔器溫躍層剖面觀測控制算法,增強了水下滑翔機的海洋環境信息的觀測能力。

圖7 滑翔器航行深度和俯仰角隨時間變化圖Fig.7 Diagram of underwater glider depth&pitching angle changes with time
[1]畢道明,李碩,崔建成,等.水下滑翔機器人控制系統設計與實現[J].微計算機信息,2006,22(11-1):18-20.
[2]Osse T J,Eriksen C C.The deepglider:a full ocean depth glider for oceanographic research[C]//OCEANS2007 IEEE, 2007:1-12.
[3]Yuh J.Design and control of autonomous underwater robots [R].Autonomous Robots,2000.
[4]劉建,李冬冬,冀大雄.AUV海洋溫躍層檢測方法綜述[J].海洋技術學報,2014,33(5):127-135.
[5]秦玉峰.溫躍層剖面測量水下滑翔器結構設計 [D].天津:天津城建大學,2013.
[6]郝佳佳,陳永利,王凡.中國近海溫躍層判定方法的研究[J].海洋科學,2008,32(12):17-24.
[7]張旭,張永剛,聶邦勝,等.垂直梯度法與最優分割法確定溫躍層邊界的比較分析[J].海洋通報,2008,27(6):20-26.[8]葛人峰,喬方利,于非,等.陸架海溫躍層特征量的一種計算方法-擬階梯函數逼近法 [J].海洋科學進展,2003,21 (4):393-400.
Design of underwater glider control system for the thermocline profile survey
WANG Yan-zhao,DENG Yun,SUN Xiu-jun,JIANG Fei
(National Ocean Technology Center,Tianjin 300112,China)
Based on the observation of underwater gliders multitasking thermocline profile characteristics of the parallel processing,the project in this paper uses STM32F429 which has high performance and low power consumption as the core ship in this control system,the design has realized the thermocline profile observation software and hardware integrated control system of underwater glider for autonomous operation in the process of the underwater glider diving,underwater hovering,rise and marine hydrology information acquisition and storage.And through the iridium communications thermocline profile observation of the underwater glider key remote transmission of data and control commands.Introducing quasi-step function approximation method to develop the thermocline profile observation of underwater gliders integrated control algorithm,realizing of thermocline profile independent observation of the underwater glider gliding motion control and measurement path planning.
underwater glider;RTOS;control system;thermocline;quasi-step function approximation method
TN709
A
1674-6236(2016)02-0149-05
2015-04-11稿件編號:201504113
2014年海洋公益性行業科研專項(201405006)
王艷召(1988—),男,河北衡水人,碩士研究生。研究方向:嵌入式系統設計、智能傳感技術研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32