基于傳聲器陣列的機器人聲源定位系統
2016-09-16 02:55:59宮玉琳文大化
長春理工大學學報(自然科學版) 2016年3期
宮玉琳,文大化
(1.長春理工大學 電子信息工程學院,長春 130022;2.中國科學院長春光學精密機械與物理研究所,長春 130033)
基于傳聲器陣列的機器人聲源定位系統
宮玉琳1,文大化2
(1.長春理工大學電子信息工程學院,長春130022;2.中國科學院長春光學精密機械與物理研究所,長春130033)
隨著計算機技術和信號處理技術的發展,各種具有特殊功能的機器人應用到人們的生產生活中。聽覺系統可以彌補機器人視覺系統存在的不足,使機器人在黑暗或有障礙物遮擋的環境中,利用聲音信息感知環境中存在的目標,并對其定位,輔助機器人工作,尤其在災難現場搜救、軍事等領域,聲源定位系統具有獨特的優勢。針對機器人聲源定位系統進行研究,設計了基于傳聲器陣列的機器人聲源定位系統,采用平面四元傳聲陣列,利用廣義互相關算法,實現對聲源的定位,具有較高的實用價值。
傳聲器陣列;廣義互相關;聲源定位
聲源定位技術自20世紀90年代以來,獲得了較快的發展,傳聲器陣列技術逐步取代了單傳聲器探測的不足,具有很好的抑制噪聲能力,并可通過相應算法確定聲源的空間具體坐標,定位準確。本文在廣義互相關算法的基礎上,設計了基于傳聲器陣列的機器人定位系統,實現了可以用于機器人的聲源定位系統,實驗結果表明系統定位精度較高,具有較高的實用價值和廣闊的應用前景。
1 傳聲器陣列結構模型
常用的傳聲器陣列結構如圖1所示,分為線陣列、面陣列、立方體陣列和球面陣列等。傳聲器數量越多,系統獲得的聲源信息就越多,定位精度越高,但對系統的要求也越高,實現的算法越復雜,這就對系統的性能提出了較高的要求。反之,傳聲器數量越少,系統的實現算法越簡單,但定位結果的精度越低。因此,實際應用中,需要綜合考慮定位精度要求、算法復雜程度和系統性能等多方面因素。
本文綜合上述因素,建立了基于四元平面傳聲器陣列的聲源定位系統,如圖2所示。由圖可見,傳聲器陣列由四個傳聲器S1、S2、S3、S4構成,各個傳聲器間距為L,陣列的中心設為坐標原點。以原點O建立如圖所示的直角坐標系,當聲源位置在S處時,便可根據S與O的距離R,水平角度φ以及俯仰角度θ,確定S的位置。
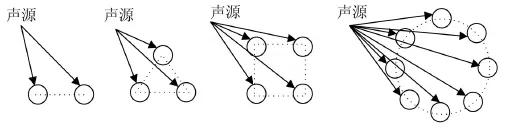
圖1 傳聲器陣列結構
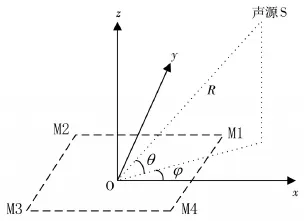
圖2 四元平面傳聲器陣列結構

化簡式(1)可得:

將式(2)代入式(1)可得:

式中,d12=τ12c,d13=τ13c,d14=τ14c。其中,c為聲速,τ12,τ13,τ14為傳聲器M1分別與M2、M3、M4的延時。因此,在聲源估計中,只需要計算出時延τ12,τ13,τ14,即可求得聲源S的坐標x,y,z及聲源與傳聲器M1的距離R1,進一步即可求得方位角φ和俯仰角θ,如式(4)和式(5)所示。
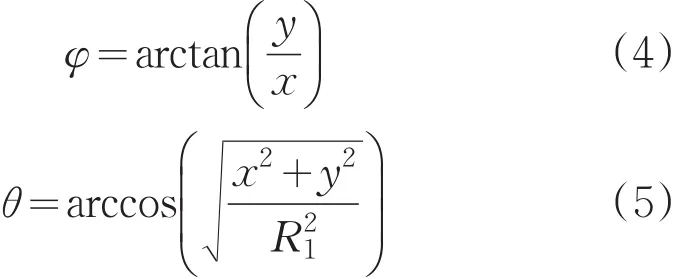
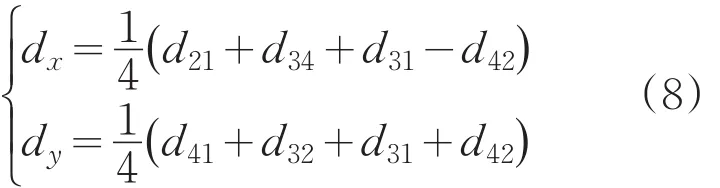
考慮到上述計算量較大,因此實際應用中可采用近似方法計算方位角φ和俯仰角如式(6)和式(7)所示。

式中:
2 廣義互相關時延估計算法
時延估計算法就是利用信號處理理論,估計計算聲音到達各個傳聲器的時間差,進一步計算聲源位置參數。
當聲源與傳聲器陣列距離較遠時,可將聲波近似作為平面波來分析,如圖3所示,只要估計出時延τ,即可根據時延計算出方位角,并進一步計算得到聲源位置。
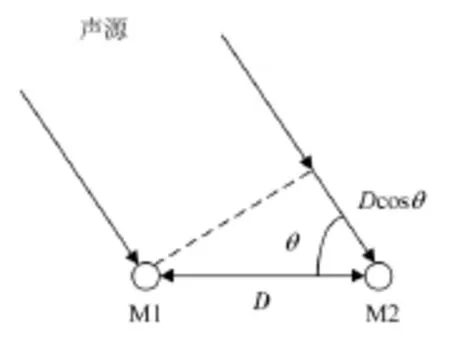
圖3 時延估計原理
因此,時延估計的準確程度就決定了聲源定位的精確度,本文采用廣義互相關時延估計(General Cross Correlation,GCC)算法,對時延進行估計計算。
GCC算法的本質就是在頻域對聲音信號進行加權,增強信號的相關部分并抑制信號的噪聲,進而使相關函數在時延的峰值更為突出。GCC算法能夠很好的抑制噪聲干擾并盡量免受聲源信號自身特性的影響。
由互相關函數與互功率譜可得:


式中,ψ12(ω)為頻域加權函數,廣義互相關函數的峰值即對應時延估計值。
常用的加權函數有ROTH加權、SCOT加權、PHAT加權、ML/HT加權。ROTH加權、SCOT加權和PHAT加權對抑制信號的周期分量具有很好的效果,ML/HT加權是統計最優濾波器,但是需要統計特性的先驗知識。本文采用ROTH加權方法對時延進行估計。
為了驗證算法的可行性,首先進行了Matlab仿真實驗,實驗中模擬兩路聲音信號x1和x2,并加入隨機噪聲,采樣頻率設置為1000,延遲點數為2,理論時延為0.004。采用GCC算法進行時延估計,仿真結果如圖4所示,仿真結果驗證了GCC算法的可行性。
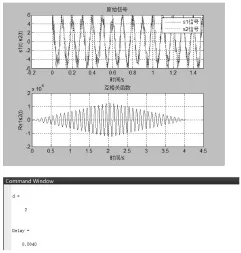
圖4 GCC算法時延估計
3 聲源定位系統實現
3.1硬件電路設計
本文所設計的聲源定位系統,采用STM32F 103C8T6芯片作為處理器。STM32系列處理基于ARMCortex-M3內核,具有高性能、低成本、低功耗的特點。硬件系統結構如圖5所示。
系統硬件電路由傳聲器、信號調理電路、A/D轉換電路、STM32處理器和液晶顯示電路組成。傳聲器陣列接收到的聲音信號首先經過信號調理電路,進行濾波和放大,然后經過A/D轉換電路轉換為數字信號,接著STM32通過GCC算法進行時延估計,進一步得出最終結果,將聲源坐標通過顯示器顯示出來。
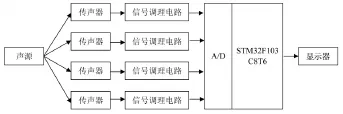
圖5 系統硬件結構框圖
傳聲器選用駐極體傳聲器,駐極體傳聲器由聲電轉換電路和阻抗轉換電路兩部分組成,具有較好的電聲性能,靈敏度高、價格低。
信號調理電路由兩級放大電路組成,如圖6所示。運算放大器選用LM358芯片,該芯片具有電壓增益高、電壓范圍寬、失調電壓低等優點。電路中第一級放大倍數為,第二級放大倍數為

電路中,R2=1kΩ,R4=20kΩ,R5=1kΩ,R7= 50kΩ,因此可得計算可得信號調理電路的放大倍數為0~1000倍。,可得輸入信號的總放大倍數為:
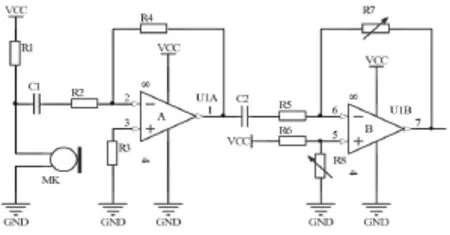
圖6 信號調理電路
STM32F103C8T6微控制器系統電路由電源電路、晶振電路、復位電路等構成,如圖7所示。
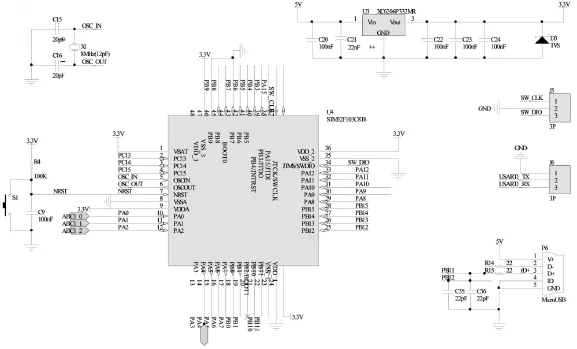
圖7 STM32F103C8T6微控制器電路
3.2軟件設計
GCC時延估計算法實現流程如圖8所示,在計算得到時延以后,即可根據式(6)和式(7)計算得到聲源的位置坐標,實現對聲源的定位。
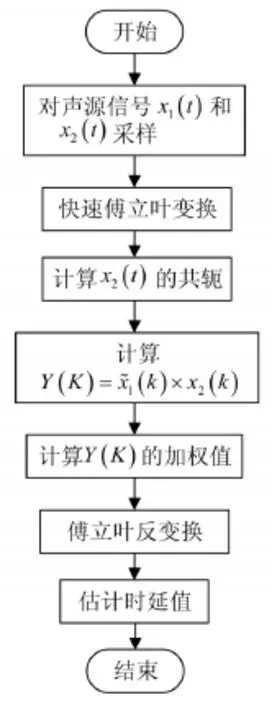
圖8 GCC實驗估計算法流程圖
4 實驗分析
實驗硬件系統如圖9所示,圖(a)為信號調理電路,圖(b)為STM32F103C8T6最小系統。
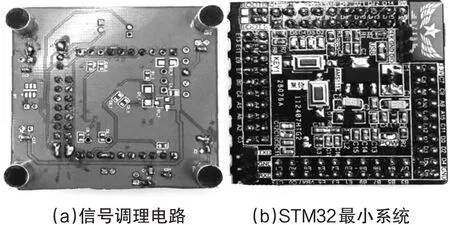
圖9 實驗硬件系統
表1所示的是利用語音發生模塊做聲源,實現的聲源定位實驗。實驗中,分別將語音模塊放置在30°、60°、90°、120°和150°位置,距離為40~60cm。
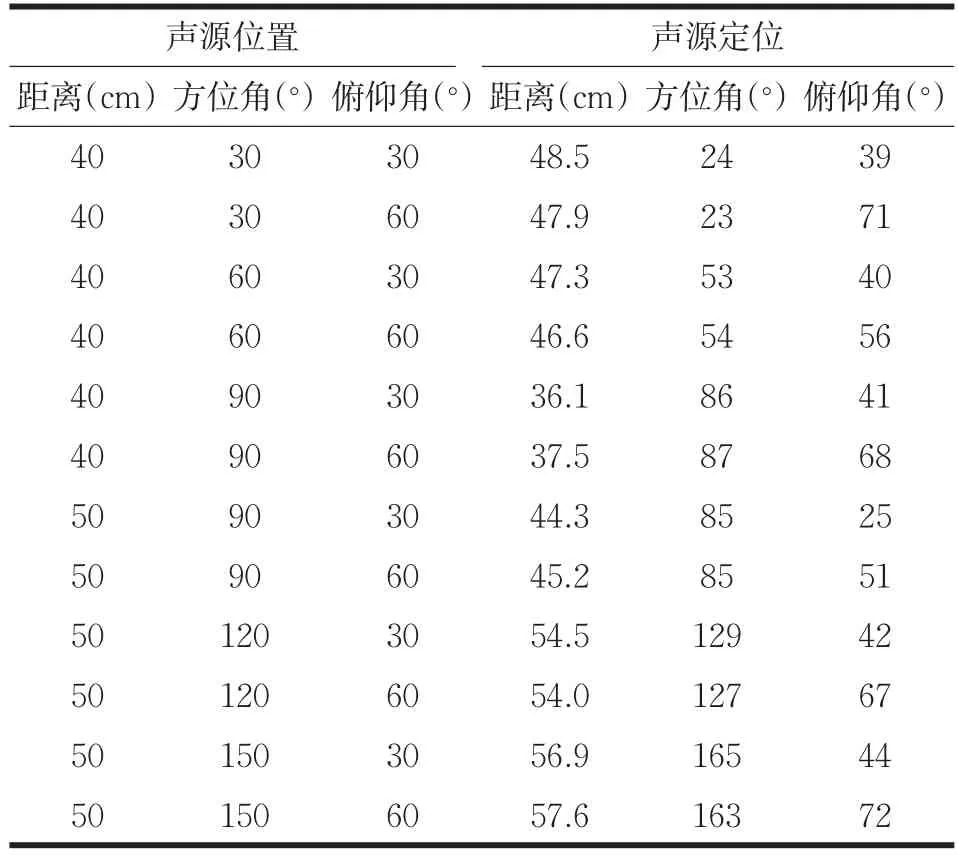
表1 實驗結果
由實驗結果可見,聲源位置在90°時誤差較小,聲源角度增大或者減小都會增大定位誤差。同時,距離越近,定位誤差越小。綜合分析實驗結果,系統硬件精度和算法是系統誤差的主要來源,此外,不同的環境中,聲速也不同,如能準確測試出實驗環境中的聲速,定位精度還可進一步提高。
5 結論
本文設計了基于傳聲器陣列的機器人聲源定位系統,完成了聲源定位系統的軟硬件設計,并對系統進行了實驗分析,實驗結果表明,系統定位誤差較小,可以實現機器人對聲源位置的定位。為了提高定位精度,未來需要在定位算法上做進一步的改進。
[1]Wax M,Lailath T.Optimum location of multiple sources by passive arrays[J].IEEE Transactions on Acoustics,SpeechandSignalProcessing,1983,31 (5):1210-1217.
[2]王濤.基于ARM的聲源定位技術研究[D].沈陽:沈陽航空航天大學,2013.
[3]Wang Yabin,Jia Jingjing,Liu Mingjie.Research on acoustic localization algorithm based on dual fourelementarrays[J].JournalofBeijingInstituteof Technology.2009,18(1):55-58.
[4]呂曉玲.基于聽覺信息的機器人聲源定位技術研究[D].天津:河北工業大學,2010.
[5]崔瑋瑋,曹志剛,魏建強.聲源定位中的時延估計技術[J].數據采集與處理,2007,22(1):91-98.
[6]柯昆.聲源定位技術研究[D].西安:西安電子科技大學,2010.
The Robot Sound Source Locating System Based on Microphone Array
GONG Yulin1,WEN Dahua2
(1.School of Electronic and Information Engineering,Changchun University of Science and Technology,Changchun 130022;2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033)
With the development of computer technology and signal processing technology,all kinds of robots with special functions are applied to the production and life of people.The auditory system can make up for the deficiency existing in the robot vision system,the robot in the dark or obstructions of environment,using sound information perception environment in the presence of the target,and the positioning,robot assisted work,especially in the field of disaster rescue,military and other fields,sound source localization system has a unique advantage.The sound source localization robot system for research,design based on microphone array sound source localization robot system by four element planar microphone array,using the generalized cross correlation algorithm,to achieve the sound source localization.Experimental results show that the system has high positioning accuracy,with a high practical value.
microphone array;generalized cross correlation;sound source localization
TP301
A
1672-9870(2016)03-0041-04
2016-02-18
宮玉琳(1983-),男,博士,講師,E-mail:garrygong1983@126.com
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
