一種適用于GPS /BDS多天線姿態測量的平差方法
2016-09-19 01:23:17郝金明葉險峰王兵浩
導航定位學報 2016年3期
張 康,郝金明,葉險峰,王兵浩,鄧 柯
(1.1.北京衛星導航中心,北京 100094;2.信息工程大學 導航與空天目標工程學院,河南 鄭州 450001;3.湘潭大學 能源工程學院,湖南 湘潭 411100)
?
一種適用于GPS /BDS多天線姿態測量的平差方法
張康1,郝金明2,葉險峰3,王兵浩2,鄧柯2
(1.1.北京衛星導航中心,北京100094;2.信息工程大學 導航與空天目標工程學院,河南 鄭州450001;3.湘潭大學 能源工程學院,湖南 湘潭411100)
為了提高GNSS姿態測量系統的精度和可靠性,提出一種適用于多天線姿態測量的3維無約束平差方法:通過一組基于4天線構型的GPS/BDS多頻單歷元靜態實驗,將所有的基線作為觀測量整體進行3維無約束平差;并將平差前后的基線結果與利用平差前后的基線進行姿態角解算的結果分別進行對比。實驗結果表明,在基于4天線構型的姿態角解算過程中,不論GPS還是BDS,使用這種平差方法都可使精度和可靠性指標有所提高。
衛星導航系統;姿態角結算;4天線構型;3維無約束平差
(1.Beijing Satellite Navigation Center,Beijing 100094,China;2.College of Navigation and Aerospace Engineering,Information Engineering University, Zhengzhou,Henan 450001,China;3.Energy Engineering College of Xiangtan University,Xiangtan,Hunan 411100,China)
0 引言
當前,中國的北斗衛星導航系統(BeiDou navigation satellite system,BDS)和美國的全球定位系統(global positioning system,GPS)一樣不僅能提供精確的定位、導航、授時信息,還能提供載體的速度、姿態、定向信息。在工程測量和武器裝備的使用上,姿態測量都是基礎性的工作。與傳統的慣性器件相比較,基于全球衛星導航系統(global navigation satellite system,GNSS)的姿態測量系統具有成本低和誤差無積累等優點,已被廣泛應用于塔吊、橋梁、工程車輛等的實時姿態監控過程中,在節約了大量人力的同時也保證了作業的安全性。當前,基于GNSS的姿態測量研究已經取得了豐碩的成果[1-2],研究重點主要集中在姿態測量的精度和可靠性方面[3]。
原則上,利用3臺不共線的天線構成的2條獨立基線就能夠確定姿態角。基于4天線構型的姿態角解算過程若只解算2條獨立基線,可以提高姿態角的輸出頻率;但會造成冗余信息的缺失,使得姿態角解算精度和可靠性沒有保證[4]。如果將所有基線進行求解,然后將冗余基線與其他2條基線作為觀測量整體平差,就可以改善姿態角的精度和可靠性[4-5]。
本文通過基于4天線構型的GPS/BDS多頻單歷元靜態實驗,分別針對GPS和BDS的基線解算結果進行整體平差,由于缺少必要的起算數據,所以選擇3維無約束平差方法。本文通過對比分析GPS和BDS平差前后的基線結果與利用平差前后的基線進行姿態角解算的結果來進行研究。
1 GNSS姿態測量數學模型
利用固定在載體上的不少于2個GNSS天線,通過載波相位差分精確確定天線之間的相對位置,就可以利用解算出來的基線向量來確定載體的3個姿態角:偏航角Ψ、俯仰角θ和橫滾角φ(通常稱之為直接法[6-7])。
通常,我們假設2個天線A、B沿載體的主軸方向放置,那么通過主基線AB就可以確定載體的偏航角Ψ和俯仰角θ[5]。
通過求解載波相位整周模糊度,2個天線A、B在地心地固坐標系中的相對位置dXEE可以精確求得;根據地心地固坐標系到當地水平坐標系的轉換關系,即可獲得天線A、B在當地水平坐標系下的相對位置

(1)
天線A、B在當地水平坐標系下的相對位置dXLL與其在載體坐標系內的基線向量dXB的關系為
dXLL=R3,1,2(Ψ,-θ,-φ)dXB。
(2)
式中R3,1,2(Ψ,-θ,-φ)為姿態矩陣,可以表示為
(3)
那么就可以確定主基線AB的2個姿態角[4]為
(4)
式中 Ψ和θ分別為載體的偏航角和俯仰角。
當第3個天線C與天線A組成一條新的基線AC(需要注意的是3個天線不能共線),那么第3個姿態角φ可以求解。為了使姿態角解算精度更高,一般將2條基線進行正交放置[4,6]。

(5)
則載體的第3個姿態角即載體的橫滾角就可以確定,表示為
(6)
2 GNSS基線網平差數學模型
2.1誤差方程
GNSS網3維無約束平差所采用的觀測值為基線向量,也就是GNSS基線向量的起點到終點的坐標差。
假設任一天線i的空間直角坐標值為參數,那么有
(7)
在對于每一條基線,都可以列出一組誤差方程為
(8)
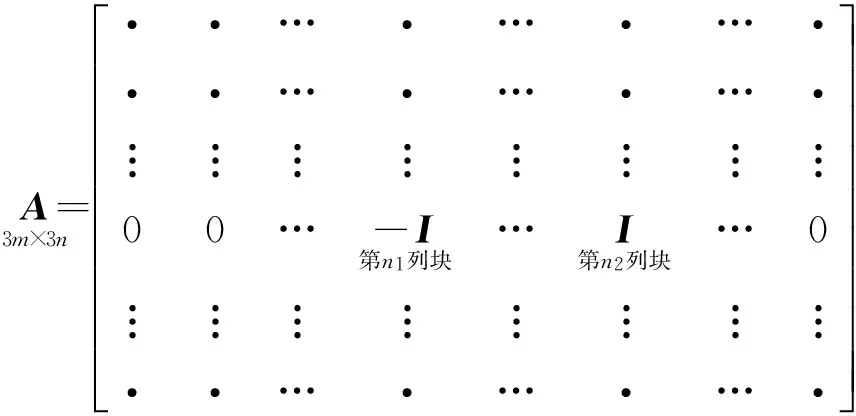
假定第m1條基線向量是由第n1點(起點)指向第n2點(終點),總的誤差方程可以表示為

(9)


2.2秩虧自由網基準
GNSS基線向量(坐標差)網平差中,R(A)=t-3=3n-3,秩虧數d=3,引入基準方程[3,7]如下:
(10)
2.3觀測值權陣

(11)
(12)
則基線向量觀測值權陣可以表示為
(13)
2.4方程的解
聯合式(9)、式(10)和式(13),按照最小二乘原理進行平差解算得到平差結果,可以表示為

(14)

(15)
(16)
3 實驗與結果分析
為了對本文提出的平差方法進行驗證,于2015-10-27利用4臺司南M300 Pro多系統多頻接收機進行了相關的實驗,實驗數據在信息工程大學GNSS實驗場采集,數據采樣率為1 s,高度角截止角設置為15°。實驗過程中4個GNSS天線A、B、C、D按照如圖1所示配置,均采用4天線之間相鄰兩兩直角分布,其中以AB為主基線。實驗共采集4個時段靜態觀測數據,分別設置了4組不同基線長度(主基線AB長度分別約為0.8、2.4、6 m和10 m)的實驗,各時段歷時約40 min。
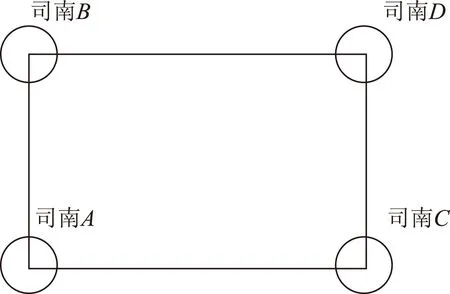
圖1 天線分布示意圖
本文分別對4組不同基線長度的靜態實驗中的所有4臺接收機采集的GPS及BDS系統多頻數據進行單歷元基線解算,采用LAMBDA算法和單歷元整周模糊度固定策略來求解模糊度[7],設置模糊度固定的RATIO限值為3.0。由于本文解算的是超短基線,因而數據處理時對流層及電離層改正基本可以忽略,星歷均采用廣播星歷。然后將同一時刻6條基線解利用本文提出的3維無約束平差得到對應基線平差結果。最后將直接通過基線結果進行姿態解算與通過基線平差結果進行姿態解算的結果進行對比。由于篇幅限制,下文中僅以主基線長度約為2.4 m的靜態實驗處理結果為例做出分析。
3.1基線平差結果分析
在主基線長度約為2.4 m的靜態實驗中,GPS系統的共視衛星數目往往在8顆左右,而北斗系統共視衛星數目往往在9顆左右。不論是GPS還是BDS,它們得到所有6條基線的解算成功率都能達到99.5 %以上。
對于GPS及BDS,分別將其所有基線結果進行3維無約束平差,平差前后基線東、北、天頂方向(E、N、U方向)結果的對比情況如圖2至圖5所示。
從圖2至圖5可以看出,不論GPS還是BDS,它們的基線解算結果經過平差后在結果穩定性方面均要優于直接解算的結果。
平差前后,GPS/BDS基線東、北、天頂方向(E、N、U方向)結果的標準差STD統計見表1。
對比表1中BDS與GPS解算的基線結果,不論是平差前還是平差后,它們的精度基本在同一水平;但是在U方向BDS的解算結果優于GPS,原因是由于GPS系統本身在高程方向的精度略差[6]。
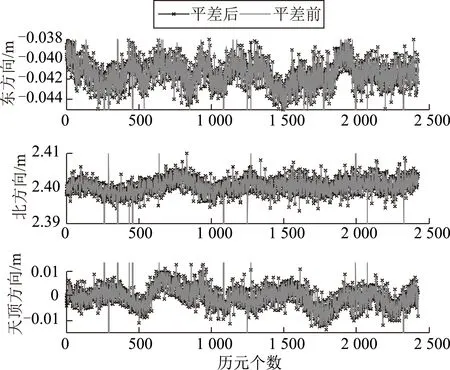
圖2 基線平差前后結果對比(GPS)
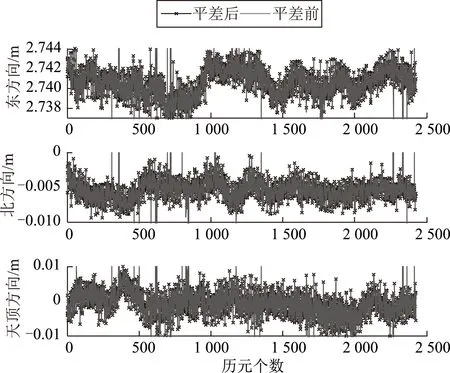
圖3 基線平差前后結果對比(GPS)
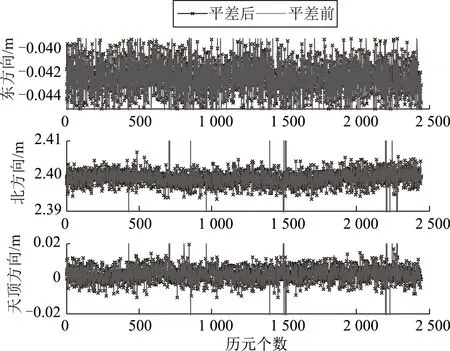
圖4 基線平差前后結果對比(BDS)
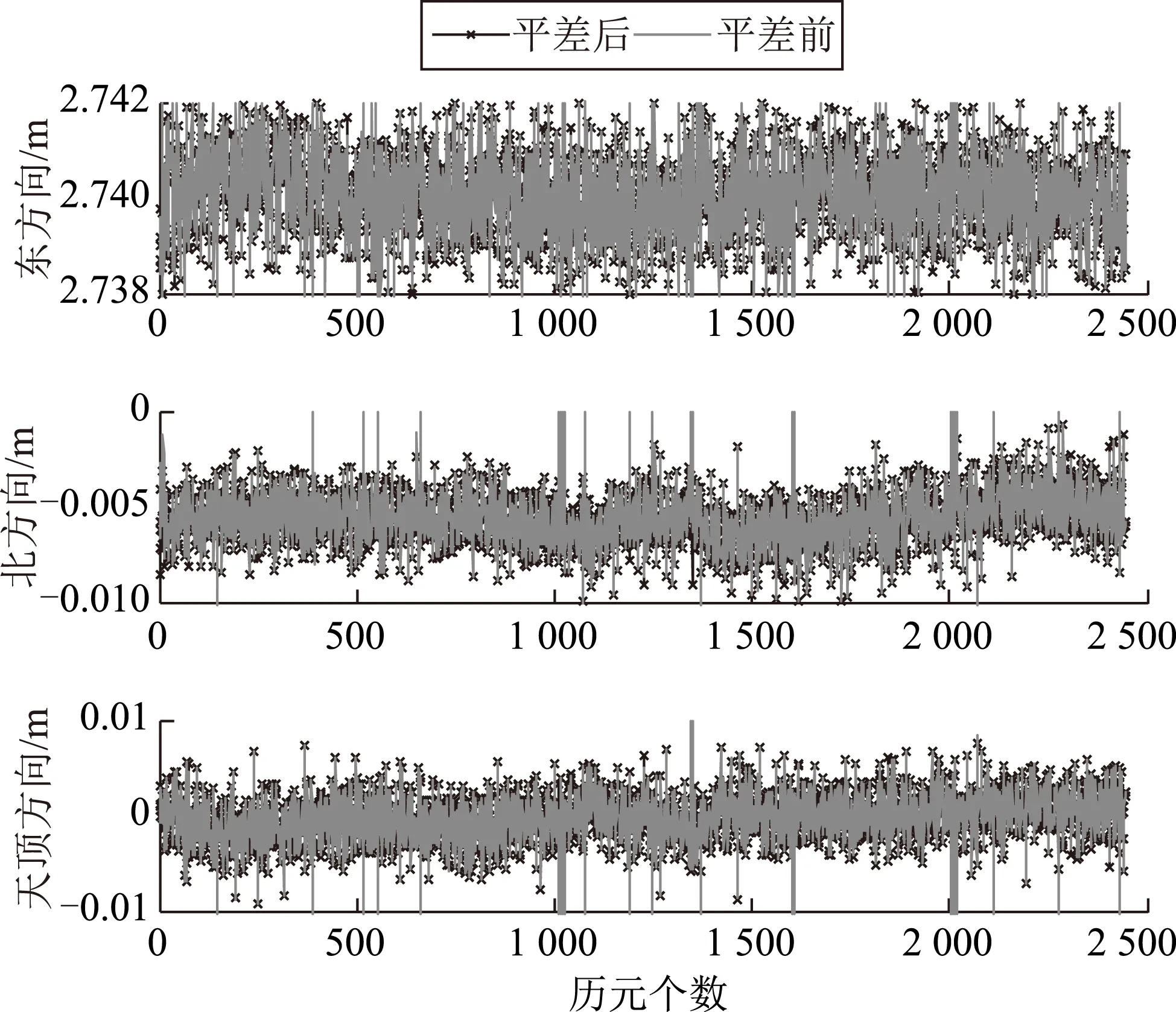
圖5 基線平差前后結果對比(BDS)
從表1還可以看出,不論GPS還是BDS,其基線解經過平差后的標準差(STD)較平差之前的有接近50 %的減小,說明平差之后結果穩定性變好,這一結果將影響到之后的姿態角解算。
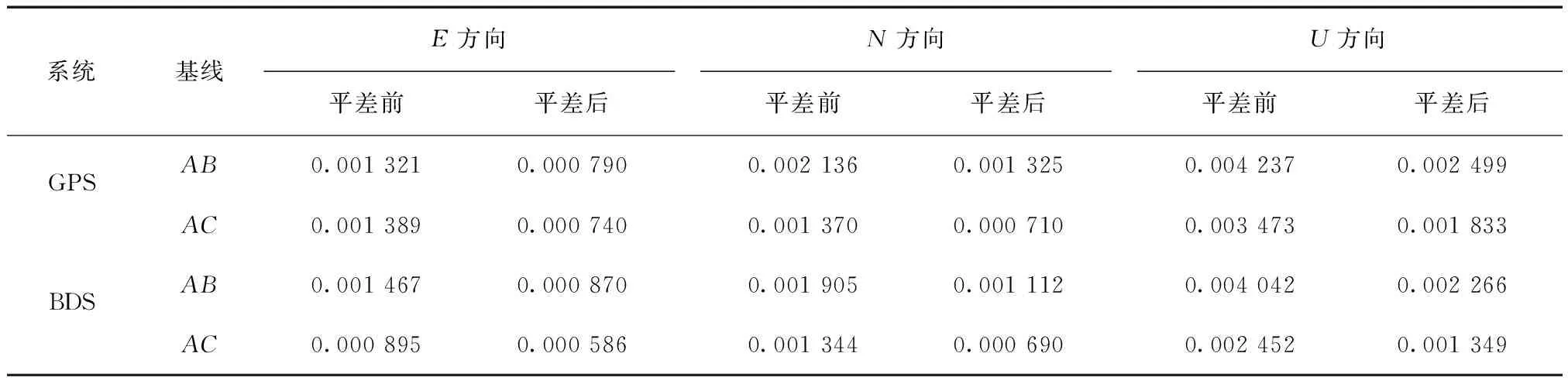
表1 GPS/BDS基線平差前后STD對比 m
3.2姿態解算結果分析
對于GPS及BDS,分別利用平差前后的基線結果通過GNSS姿態測量數學模型進行姿態角解算,基線解平差前后姿態解算結果的對比情況如圖6至圖7所示。
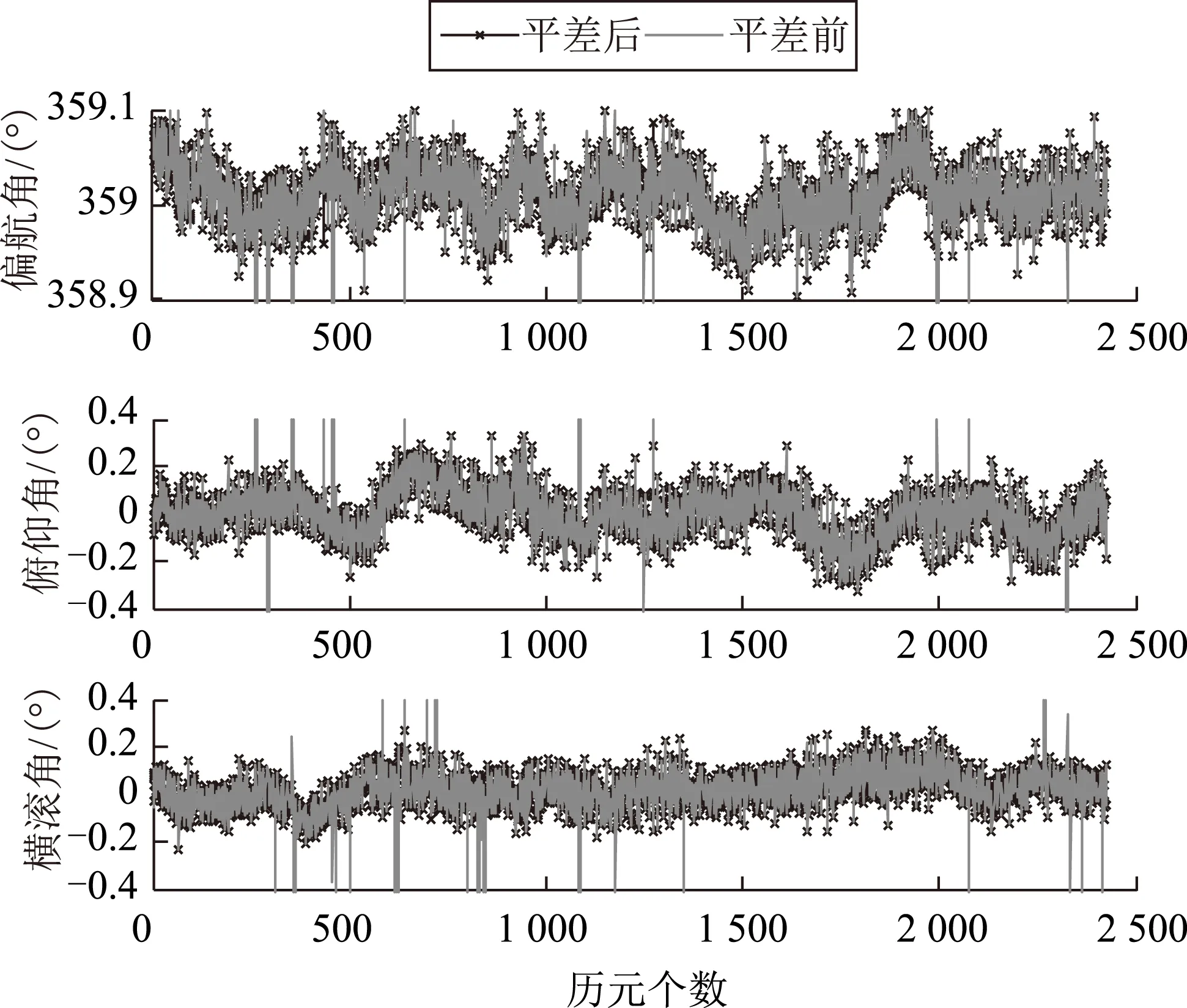
圖6 GPS基線平差前后姿態解算結果對比
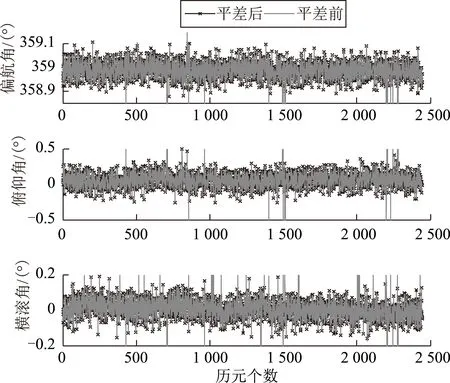
圖7 BDS基線平差前后姿態解算結果對比
通過表 2可以看出,利用BDS和GPS進行姿態測量的結果精度在同一水平,驗證了目前BDS的定位性能與GPS基本一致。
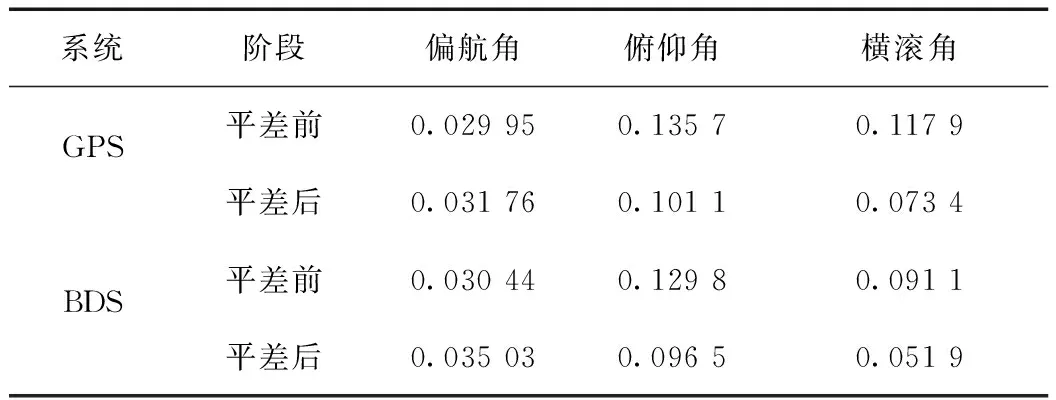
表2 GPS/BDS基線平差前后姿態角解算結果STD對比 (°)
從圖6、圖7和表 2中可以看出,對于2.4×2.4 m2的4天線正交布局姿態測量系統而言,不論是GPS還是BDS,基線網平差前偏航角的精度都能達到0.03°,俯仰角和橫滾角精度略差在0.1°左右;經過基線3維無約束平差后,偏航角的精度提高得并不明顯,而俯仰角和橫滾角的精度有了較大的提高:由此可見,將基線測量結果進行平差可以提高姿態角解算精度,使結果精度更加均衡。
將GNSS觀測基線結果整體進行3維無約束平差后,實質上是將總體誤差更加合理地分攤到東、北、天頂(E、N、U)3個方向上,使3個姿態角的精度更加均衡。
4 結束語
本文對適用于GPS/BDS多天線姿態測量的平差方法進行了相關研究,通過實測數據解算和結果分析,初步得到了以下結論:
1)本文提出的先將GPS/BDS觀測基線結果作為整體進行3維無約束平差,再利用平差后的基線結果進行姿態解算的思路,能夠有效地提高姿態角輸出的精度和可靠性。
2)利用BDS與GPS進行基線解算,不論是平差前還是平差后,BDS與GPS的精度基本在同一水平,但是在天頂方向BDS的解算結果優于GPS。
3)利用BDS和GPS進行姿態測量,結果精度在同一水平,驗證了目前BDS的定位性能與GPS基本一致。
4)不論GPS還是BDS,其基線解經過平差之后結果穩定性更好,平差后基線東、北、天 3個方向標準差(STD)較平差之前減小了近50%。
5)不論GPS還是BDS,其基線解經過平差之后再進行姿態解算,結果偏航角的精度提高得并不明顯,而俯仰角和橫滾角的精度有了較大的提高。
[1]TEUNISSEN P J G,GIORGI G,BUIST P J.Testing of a new single-frequency GNSS carrier phase attitude determination method:land,ship and aircraft experiments[J].GPS Solutions,2011,15(1):15-28.
[2]李俊毅.GPS 姿態測量及相關技術的研究[D].鄭州:信息工程大學,2004:54-67.
[3]李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2010:289-312.
[4]KUYLEN L V,BOON F,SIMSKY A.Attitude determination methods used in the PolaRx2@ multi-antenna GPS receiver[C]//The Institute of Navigation(ION).Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation.California:ION,2005:125-135.
[5]WANG B,MIAO L,WANG S,et al.A constrained LAMBDA method for GPS attitude determination[J].GPS Solutions,2009,13(2):97-107.
[6]王兵浩.BDS/GPS姿態測量方法研究[D].鄭州:信息工程大學,2015:45-56.
[7]隋立芬,宋力杰,柴洪洲.誤差理論與測量平差基礎[M].鄭州:測繪出版社,2010:185-190.
[8]劉基余.GPS衛星導航定位原理與方法[M].北京:科學出版社,2008:300-312.
[9]劉若普.GPS三維姿態測量技術研究[D].上海:上海交通大學,2007:33-46.
[10]張前勇,汪雷.GPS高程測量精度分析[J].湖北民族學院學報:自然科學版,2008,26(4):422-425.
[11]GIORGI G,TEUNISSEN P J G,BUIST P J.A search and shrink approach for the baseline constrained LAMBDA method:experimental results[C]//Tokyo University of Marine Science and Technology Laboratory of Satellite Navigation.Proceedings of the International Symposium on GPS/GNSS.Tokyo,Japan:Curran Associates,Inc.,2009:797-806.
[12]TEUNISSEN P J G.The least-squares ambiguity decorrelation adjustment:a method for fast GPS integer ambiguity estimation[J].Journal of Geodesy,1995,70(1/2):65-82.
[13]王冰,隋立芬,張清華,等.利用GPS解算載體測姿的算法研究[J].武漢大學學報·信息科學版,2013,38(12):1392-1395.
An adjustment method suitable for GPS/BDS multi-antenna attitude determination
ZHANG Kang1,HAO Jinming2,YE Xianfeng3,WANG Binghao2,DENG Ke2
In order to improve the accuracy and reliability of GNSS attitude measurement system,the paper proposed a three-dimensional non-constrained adjustment method for multi-antenna attitude measurement:through the GPS/BDS multi-frequency single-epoch static test based on the four-antenna configuration,all the baselines was taken as the whole concept of measuring to be adjusted by the three-dimensional non-constrained adjustment; and the final results of the baseline before or after adjustment and the attitude angles solved by both baseline results before or after adjustment were compared respectively.Result showed that using the adjustment method for the attitude determination of both BDS and GPS based on four-antenna configuration,the accuracy and reliability could be improved efficiently.
satellite navigation system; attitude determination; four-antenna configuration; three-dimensional non-constrained adjustment
2015-11-04
湖南省教育廳資助科研項目(13C903);地理信息工程國家重點實驗室重點基金課題“面向無人機自主著陸的衛星/慣性/視覺信息融合研究(SKLGIE2014-Z-2-1)。
張康(1990—),男,福建莆田人,助理工程師,研究方向為精密相對定位與姿態測量。
10.16547/j.cnki.10-1096.20160313.
P228.4
A
2095-4999(2016)03-0058-06
引文格式:張康,郝金明,葉險峰,等.一種適用于GPS/BDS多天線姿態測量的平差方法[J].導航定位學報,2016,4(3):58-63.(ZHANG Kang,HAO Jinming,YE Xianfeng,et al.An adjustment method suitable for GPS/BDS multi-antenna attitude determination[J].Journal of Navigation and Positioning,2016,4(3):58-63.)
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21