BDS地基增強(qiáng)系統(tǒng)單雙模定位性能比較
2016-09-19 01:23:23尹子明劉天恒張樹為周潤(rùn)楊閆建巧
導(dǎo)航定位學(xué)報(bào) 2016年3期
尹子明,劉天恒,張樹為,周潤(rùn)楊,閆建巧
(1.91431部隊(duì), 廣東 湛江 524005;2.信息工程大學(xué) 導(dǎo)航與空天目標(biāo)工程學(xué)院,河南 鄭州 450001)
?
BDS地基增強(qiáng)系統(tǒng)單雙模定位性能比較
尹子明1,2,劉天恒2,張樹為2,周潤(rùn)楊2,閆建巧2
(1.91431部隊(duì), 廣東湛江524005;2.信息工程大學(xué) 導(dǎo)航與空天目標(biāo)工程學(xué)院,河南鄭州450001)
為了進(jìn)一步研究BDS地基增強(qiáng)系統(tǒng),針對(duì)鄭州BDS地基增強(qiáng)系統(tǒng)的服務(wù)時(shí)效性、實(shí)時(shí)靜態(tài)定位精度、實(shí)時(shí)動(dòng)態(tài)定位精度,在單GPS和BDS/GPS 2種模式下對(duì)定位測(cè)量精度、內(nèi)符合精度、外符合精度和初始化時(shí)間進(jìn)行了測(cè)試分析。測(cè)試結(jié)果表明,相比較GPS地基增強(qiáng)系統(tǒng)而言,利用BDS/GPS差分?jǐn)?shù)據(jù)的流動(dòng)站初始化時(shí)間明顯縮短,定位精度也有一定程度的提高,實(shí)時(shí)精密定位水平精度達(dá)到2 cm,高程精度達(dá)到4 cm。
BDS;地基增強(qiáng)系統(tǒng);網(wǎng)絡(luò)RTK;定位精度
0 引言
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system,BDS)能夠?yàn)橹袊?guó)及其周邊地區(qū)提供導(dǎo)航、定位、授時(shí)以及短報(bào)文通信服務(wù)。全球?qū)Ш叫l(wèi)星系統(tǒng) (global navigation satellite system,GNSS)在個(gè)人導(dǎo)航定位、航空航天、測(cè)繪等領(lǐng)域得到廣泛應(yīng)用;但目前衛(wèi)星導(dǎo)航系統(tǒng)的完好性、可靠性、定位精度難以滿足用戶對(duì)導(dǎo)航系統(tǒng)日益增長(zhǎng)的需求[1]。空基增強(qiáng)系統(tǒng)實(shí)時(shí)定位精度僅能達(dá)到m級(jí)至亞m級(jí)。連續(xù)運(yùn)行衛(wèi)星定位服務(wù)綜合系統(tǒng)(continuously operating reference stations,CORS)實(shí)時(shí)定位精度可以達(dá)到cm級(jí),但也存在一些問題:應(yīng)用在國(guó)家高精度定位領(lǐng)域的安全隱患;服務(wù)行業(yè)有限,僅服務(wù)于測(cè)繪、城建、地震等專業(yè)行業(yè)。因此迫切需要建設(shè)擁有自主知識(shí)產(chǎn)權(quán)的BDS地基增強(qiáng)系統(tǒng)[2]。BDS地基增強(qiáng)系統(tǒng)(ground-based augmentation systems,GBAS)是利用地面增強(qiáng)站向用戶發(fā)送差分定位數(shù)據(jù)來(lái)提高導(dǎo)航系統(tǒng)的導(dǎo)航定位精度,提高了系統(tǒng)的可靠性,并增強(qiáng)了系統(tǒng)的完好性監(jiān)測(cè)[3]。
文獻(xiàn)[4]對(duì)地基增強(qiáng)系統(tǒng)在飛機(jī)著陸中的應(yīng)用做了仿真分析;文獻(xiàn)[5]等測(cè)試了單全球定位系統(tǒng)(global positioning system,GPS)模式下的長(zhǎng)江干線連續(xù)運(yùn)行參考站系統(tǒng)精度、可用性等;文獻(xiàn)[6]中研究了格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GLONASS)對(duì)法國(guó)國(guó)家CORS網(wǎng)的影響;文獻(xiàn)[7]也對(duì)GLONASS加入GPS CORS網(wǎng)是否提高了北美參考系精度進(jìn)行了分析。
本文基于河南省地基增強(qiáng)實(shí)驗(yàn)系統(tǒng)對(duì)單GPS和BDS+GPS 2種模式下的系統(tǒng)性能進(jìn)行了測(cè)試,并比較分析河南省BDS地基增強(qiáng)系統(tǒng)的定位性能。
1 地基增強(qiáng)系統(tǒng)
1.1系統(tǒng)簡(jiǎn)介
河南省BDS地基增強(qiáng)系統(tǒng)由參考站網(wǎng)(含移動(dòng)參考站)、數(shù)據(jù)處理與控制中心、用戶設(shè)備、網(wǎng)絡(luò)通信系統(tǒng)組成。參考站網(wǎng)是系統(tǒng)基礎(chǔ),數(shù)據(jù)處理與控制中心是核心,用戶設(shè)備是關(guān)鍵[8-9]。系統(tǒng)目標(biāo)是建立覆蓋全省的參考站網(wǎng),系統(tǒng)能夠同時(shí)接收BDS、GPS的衛(wèi)星信號(hào),能夠?yàn)橛脩籼峁?~2 m、dm級(jí)的導(dǎo)航定位服務(wù),以及cm級(jí)至mm級(jí)的精密定位服務(wù)。鄭州BDS地基增強(qiáng)實(shí)驗(yàn)系統(tǒng)為河南省BDS地基增強(qiáng)系統(tǒng)的一期建設(shè),包括由鄭州站、登封站、鞏義站、鳳泉站、博愛站、開封站組成的參考站網(wǎng),覆蓋范圍為鄭州全市,系統(tǒng)實(shí)時(shí)定位精度在水平方向優(yōu)于5 cm,高程方向優(yōu)于10 cm。
BDS地基參考站網(wǎng)主要由GNSS連續(xù)運(yùn)行參考站和移動(dòng)參考站組成,重點(diǎn)負(fù)責(zé)提供GNSS高精度實(shí)時(shí)數(shù)據(jù)流、原始觀測(cè)文件等導(dǎo)航應(yīng)用的基礎(chǔ)性、公共性、關(guān)鍵數(shù)據(jù)信息。其中移動(dòng)參考站提供臨時(shí)參考站的功能,是地基增強(qiáng)系統(tǒng)連續(xù)提供服務(wù)的一種必要備份手段,具有網(wǎng)點(diǎn)應(yīng)急加密、空白區(qū)域填補(bǔ)、緊急情況下替代固定站的作用。移動(dòng)參考站可以快速機(jī)動(dòng)地布設(shè)于需要的位置,發(fā)揮應(yīng)急機(jī)動(dòng)的效能。
數(shù)據(jù)處理與控制中心作為系統(tǒng)應(yīng)用的數(shù)據(jù)交換、信息共享、產(chǎn)品生成、標(biāo)準(zhǔn)管理的樞紐平臺(tái),是一個(gè)基于網(wǎng)絡(luò)的導(dǎo)航綜合服務(wù)平臺(tái)。數(shù)據(jù)處理與控制中心形成3類主要產(chǎn)品和服務(wù):①提供北斗信息、精密定位差分信息、導(dǎo)航地圖數(shù)據(jù)等基礎(chǔ)數(shù)據(jù)產(chǎn)品;②根據(jù)建設(shè)步驟及合作戰(zhàn)略協(xié)議,匯集整理各行業(yè)各部門基于位置的信息,進(jìn)行分類管理,并按照授權(quán)與協(xié)議,向指定用戶開放共享;③研究和制定基于本系統(tǒng)的BDS衛(wèi)星導(dǎo)航應(yīng)用標(biāo)準(zhǔn)和規(guī)范,為應(yīng)用服務(wù)規(guī)范提供參考,提高信息共享和互聯(lián)互通能力。
用戶設(shè)備主要指用戶終端接收設(shè)備,它是一個(gè)非固定的系統(tǒng),是可以擴(kuò)展的系統(tǒng),在數(shù)據(jù)處理與控制中心中加入相應(yīng)的服務(wù)計(jì)算即可擴(kuò)展出一種新的用戶服務(wù),用戶可根據(jù)需求不同,定制不同的應(yīng)用[10]。
網(wǎng)絡(luò)通信系統(tǒng)主要分為3部分:一部分用于連接參考站到服務(wù)中心的有線傳輸;一部分用于連接數(shù)據(jù)處理與控制中心到用戶的無(wú)線傳輸;另外部分用于連接分系統(tǒng)內(nèi)部設(shè)備之間的數(shù)據(jù)通信。數(shù)據(jù)處理與控制中心通過有線寬帶連接到互聯(lián)網(wǎng),具有一個(gè)公網(wǎng)靜態(tài)互聯(lián)網(wǎng)協(xié)議(internet protocol,IP)地址和域名,可以供實(shí)時(shí)用戶和事后用戶進(jìn)行訪問、獲取服務(wù)和數(shù)據(jù)。
1.2誤差分析
地基增強(qiáng)系統(tǒng)差分定位技術(shù)就是利用參考站的觀測(cè)數(shù)據(jù)(包括衛(wèi)星原始觀測(cè)數(shù)據(jù)、氣象數(shù)據(jù))對(duì)參考站網(wǎng)覆蓋范圍內(nèi)的、與時(shí)間空間相關(guān)的各項(xiàng)誤差進(jìn)行估計(jì),然后移動(dòng)用戶再利用這些誤差估計(jì)值與其原始觀測(cè)值進(jìn)行差分定位,從而提高測(cè)量精度、縮短測(cè)量時(shí)間[11]。地基增強(qiáng)系統(tǒng)差分定位獲得固定解可靠性為95%~99%。地基增強(qiáng)系統(tǒng)差分定位對(duì)衛(wèi)星星歷、衛(wèi)星鐘差、電離層、對(duì)流層、固體潮、相對(duì)論效應(yīng)等誤差進(jìn)行了有效的削弱;但同樣也引入了一些新的誤差,如參考站坐標(biāo)誤差、數(shù)據(jù)通訊誤差、數(shù)據(jù)中心解算軟件誤差、流動(dòng)站解算軟件誤差等[12]。
2 性能分析
2.1實(shí)時(shí)定位精度評(píng)估方法
實(shí)時(shí)定位精度測(cè)試可以分為定位測(cè)量精度評(píng)定、內(nèi)符合精度評(píng)定和外符合精度評(píng)定。測(cè)量精度反映用戶端使用差分?jǐn)?shù)據(jù)后進(jìn)行單次位置解算的精度,可以直接從實(shí)時(shí)相對(duì)定位 (real-time kinematic,RTK)設(shè)備的測(cè)量結(jié)果中獲取;內(nèi)符合精度可以反應(yīng)出定位結(jié)果的收斂情況;外符合精度直接反映出系統(tǒng)實(shí)時(shí)定位的精度[13]。
1)內(nèi)符合精度
(1)
2)外符合精度
(2)
將測(cè)點(diǎn)已知成果(2000國(guó)家大地坐標(biāo)系)與各測(cè)點(diǎn)的RTK實(shí)時(shí)動(dòng)態(tài)測(cè)量結(jié)果進(jìn)行比較,按式(2)即可求出各測(cè)點(diǎn)系統(tǒng)外符合精度。在動(dòng)態(tài)情況下,將事后動(dòng)態(tài)基線解的結(jié)果代替觀測(cè)點(diǎn)坐標(biāo)的真值,按式(2)即可求出外符合精度。
2.2動(dòng)態(tài)網(wǎng)絡(luò)RTK定位精度
分別于2015-09-28和2015-10-09進(jìn)行系統(tǒng)實(shí)時(shí)動(dòng)態(tài)精度測(cè)試。在作業(yè)車上裝載中海達(dá)H32接收機(jī)與南方銀河1接收機(jī),采樣率設(shè)為5s,利用車載行駛作業(yè)獲取固定解,車速為30~70km/h,根據(jù)測(cè)試結(jié)果統(tǒng)計(jì)分析導(dǎo)航定位精度。本次測(cè)試分為2組:第一組只接收GPS差分信息;第二組接收BDS+GPS差分信息,并對(duì)定位解算精度進(jìn)行統(tǒng)計(jì)。在測(cè)試中還通過關(guān)閉登封站的數(shù)據(jù)服務(wù)對(duì)參考站網(wǎng)外的精度進(jìn)行了測(cè)試。圖1為動(dòng)態(tài)網(wǎng)絡(luò)RTK測(cè)試的行進(jìn)路線在數(shù)據(jù)中心用戶服務(wù)軟件上的軌跡顯示。
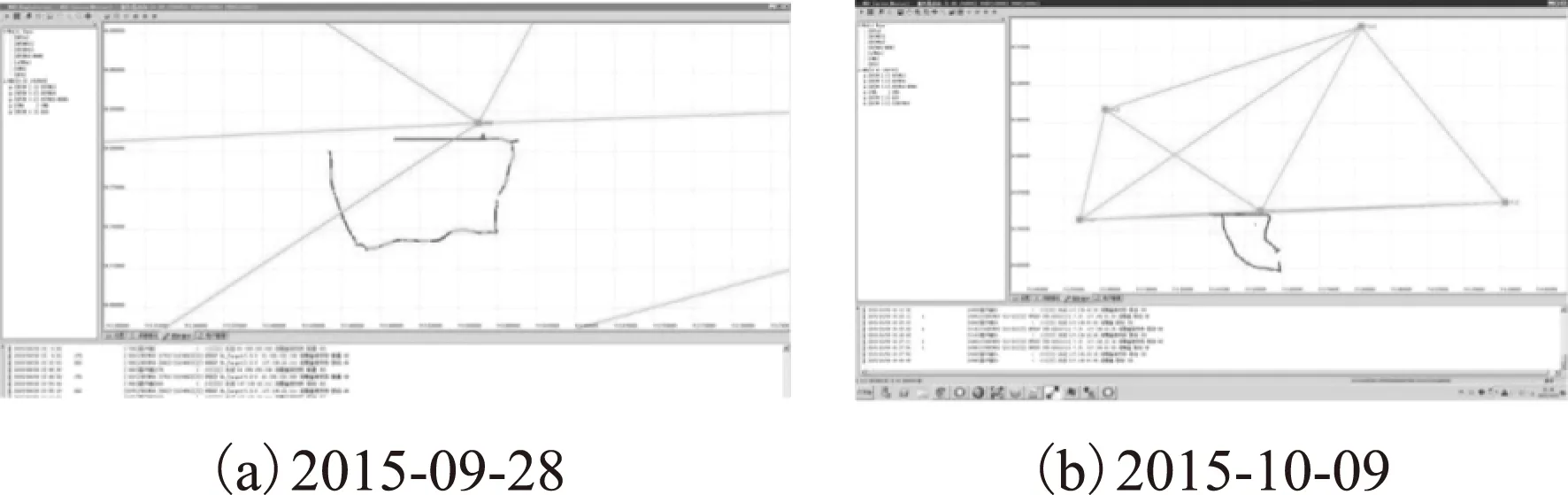
圖1 動(dòng)態(tài)測(cè)量軌跡圖
經(jīng)統(tǒng)計(jì)計(jì)算,動(dòng)態(tài)測(cè)量中平面測(cè)量精度平均值,單GPS模式為0.021m,BDS+GPS模式為0.014m;高程測(cè)量精度均值,單GPS模式為0.030m,BDS+GPS模式為0.026m。利用GrafNav軟件和原始觀測(cè)數(shù)據(jù)計(jì)算移動(dòng)站位置,再根據(jù)式(2)計(jì)算動(dòng)態(tài)測(cè)量中平面外符合精度,單GPS模式為0.031m,BDS+GPS模式為0.025m;高程外符合精度:?jiǎn)蜧PS模式為0.033m,BDS+GPS模式為0.036m。在動(dòng)態(tài)測(cè)量精度上,BDS+GPS模式比單GPS模式的平面精度略高,而高程精度大致相當(dāng)。
在10月9日8∶00—13∶00動(dòng)態(tài)網(wǎng)絡(luò)RTK測(cè)試中,中海達(dá)H32的BDS+GPS模式測(cè)量精度及位置精度因子(positiondilutionofprecision,PDOP)變化如圖 2和圖 3所示。測(cè)試是在市區(qū)以及環(huán)城高速路上進(jìn)行的,由于建筑物的遮擋,在1 500~2 500歷元期間出現(xiàn)頻繁失鎖現(xiàn)象。從圖 2和圖 3可以看出,網(wǎng)絡(luò)RTK測(cè)量時(shí)x、y、H方向上的精度與測(cè)量時(shí)的衛(wèi)星分布,即PDOP,具有很高的相關(guān)性。
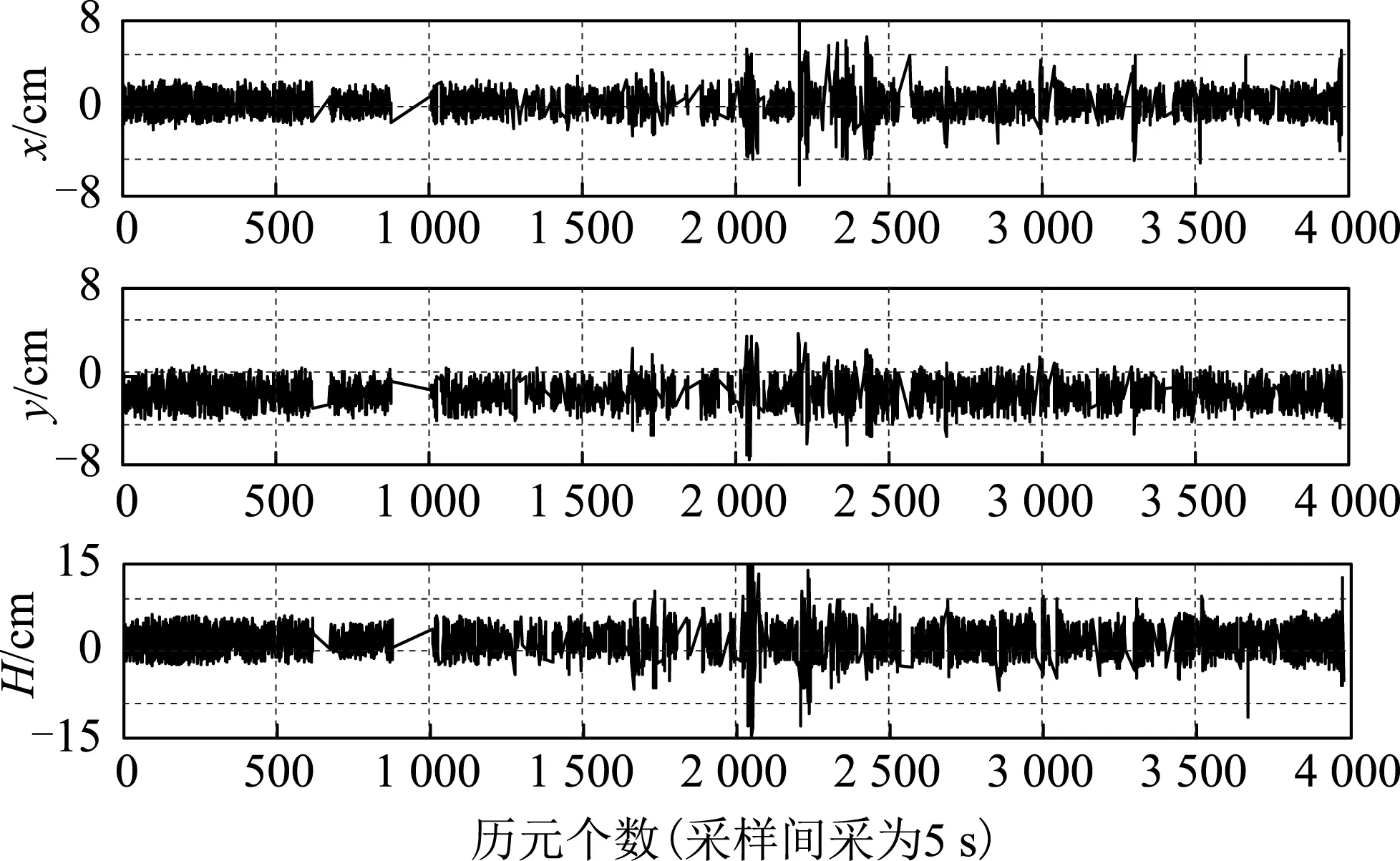
圖2 動(dòng)態(tài)測(cè)試測(cè)量精度變化圖(BDS+GPS)
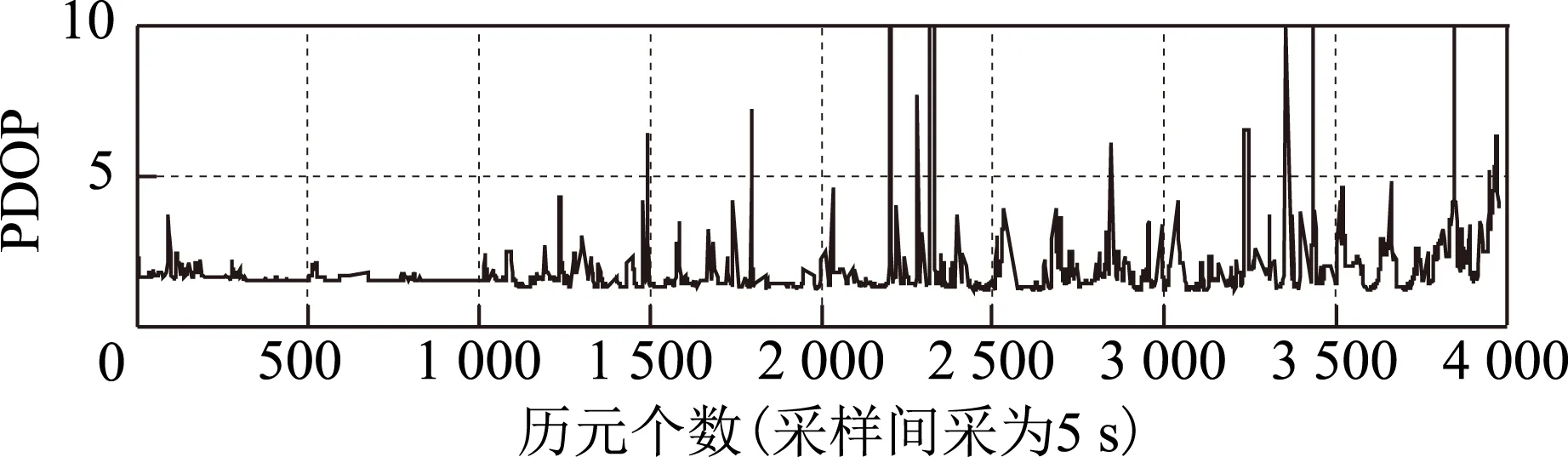
圖3 動(dòng)態(tài)測(cè)試PDOP變化圖(BDS+GPS)
2.3靜態(tài)網(wǎng)絡(luò)RTK定位精度
2015-10-10 UTC 11∶00—17∶00,在鄭州市GNSS基線場(chǎng)中選取2個(gè)點(diǎn)分別安放網(wǎng)絡(luò)RTK H32設(shè)備和南方銀河1設(shè)備,采樣率設(shè)為5 s,采用單GPS模式和BDS+GPS模式進(jìn)行觀測(cè)。
經(jīng)統(tǒng)計(jì)計(jì)算,靜態(tài)測(cè)量中平面測(cè)量精度平均值:?jiǎn)蜧PS模式為0.020 m,BDS+GPS模式為0.016 m;高程測(cè)量精度均值:?jiǎn)蜧PS模式為0.025 m,BDS+GPS模式為0.028 m。與動(dòng)態(tài)測(cè)量精度相比,靜態(tài)測(cè)量精度無(wú)明顯變化,BDS+GPS模式仍優(yōu)于單GPS模式。
通過式(1)和式(2)計(jì)算,靜態(tài)測(cè)量中平面內(nèi)符合測(cè)量精度,單GPS模式為0.013 m,BDS+GPS模式為0.008 m;高程內(nèi)符合精度,單GPS模式為0.017 m,BDS+GPS模式為0.011 m;靜態(tài)測(cè)量中平面外符合精度,單GPS模式為0.023 m,BDS+GPS模式為0.016 m;高程外符合精度,單GPS模式為0.018 m,BDS+GPS模式為0.028 m。無(wú)論是單GPS模式還是BDS+GPS模式,靜態(tài)外符合精度明顯優(yōu)于動(dòng)態(tài)外符合精度。
圖 4和圖 5為中海達(dá)H32的GPS+BDS模式靜態(tài)測(cè)量結(jié)果與真值之差以及PDOP的分布情況。
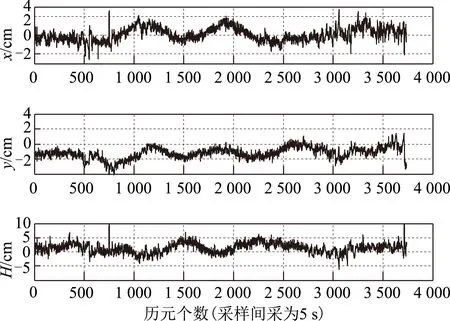
圖4 靜態(tài)測(cè)量與真值偏差變化(BDS+GPS)
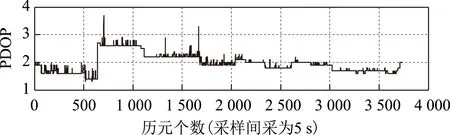
圖5 靜態(tài)測(cè)量PDOP變化圖(BDS+GPS)
從圖中可以看出:整個(gè)測(cè)試過程衛(wèi)星可見性良好,未出現(xiàn)嚴(yán)重的失鎖現(xiàn)象;水平方向(x、y方向)相對(duì)真值的偏差變化趨勢(shì)具有一致性;y方向和H方向存在較為明顯的系統(tǒng)性偏差。
2種型號(hào)測(cè)試設(shè)備測(cè)試內(nèi)外符合精度如表 1所示。從測(cè)試結(jié)果中可以看出,無(wú)論是在靜態(tài)測(cè)量外符合精度還是在內(nèi)符合精度上,BDS+GPS模式比單GPS模式的平面精度略高,而高程精度大致相當(dāng)。

表1 定位精度統(tǒng)計(jì)表
2.4時(shí)效性
選取河南省鄭州市GNSS基線場(chǎng)中若干個(gè)點(diǎn)作為測(cè)試點(diǎn),分別安放網(wǎng)絡(luò)RTK H32設(shè)備和南方銀河1設(shè)備。每個(gè)網(wǎng)絡(luò)RTK設(shè)備分別選取GPS和GPS+BDS模式,每種模式初始化10次,并記錄初始化時(shí)間。每個(gè)型號(hào)的設(shè)備都使用2臺(tái)進(jìn)行測(cè)試。從表2中可以看出:GPS+BDS模式比GPS模式初始化速度快,固定時(shí)間約縮短5 s,說(shuō)明測(cè)區(qū)范圍內(nèi)增加使用BDS差分信息、增加共用衛(wèi)星數(shù)量可使接收機(jī)初始化速度明顯加快。
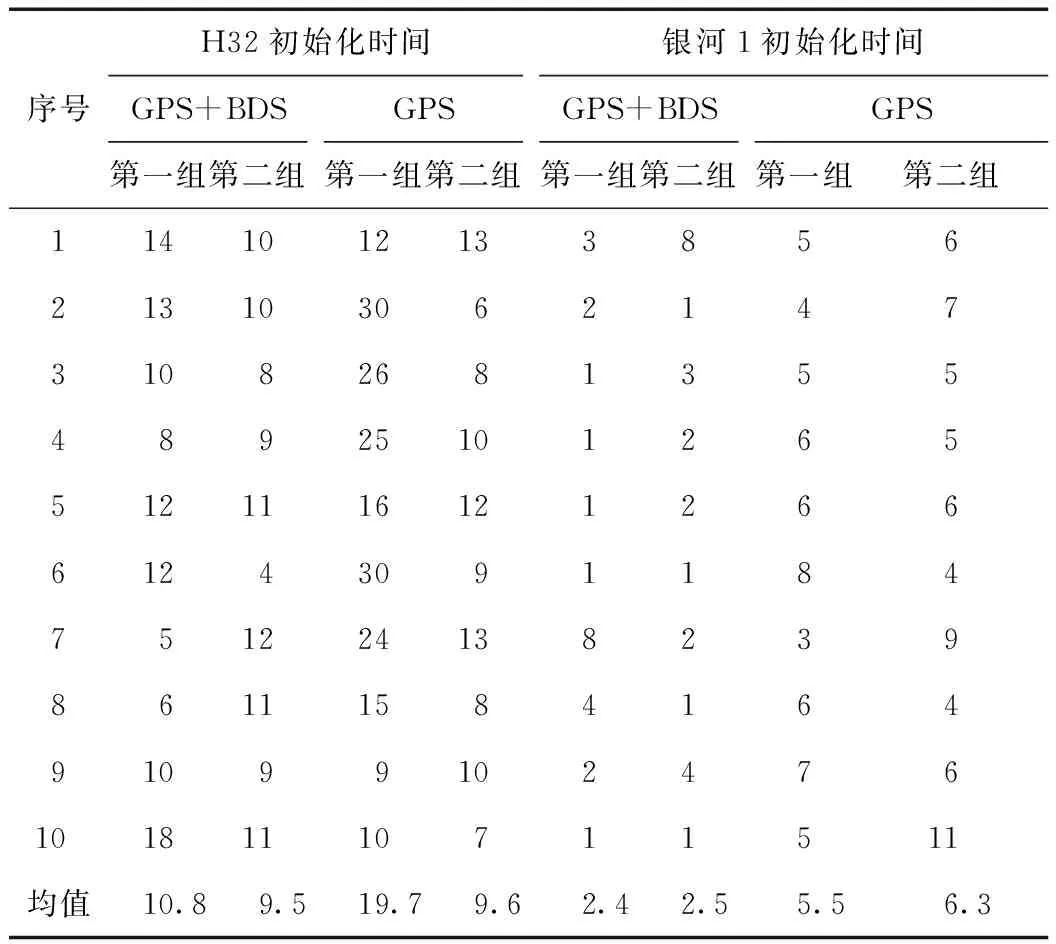
表2 初始化時(shí)間 s
3 結(jié)束語(yǔ)
鄭州地基增強(qiáng)系統(tǒng)建立了覆蓋鄭州市的兼容BDS與GPS的參考站,能夠?yàn)楹幽鲜》秶鷥?nèi)的用戶提供1~2 m、dm級(jí)的導(dǎo)航定位服務(wù)以及cm級(jí)至mm級(jí)的精密定位服務(wù)。在定位精度方面,該系統(tǒng)采用多衛(wèi)星導(dǎo)航系統(tǒng)虛擬參考站(virtual reference station,VRS) 技術(shù)實(shí)時(shí)精密定位水平精度達(dá)到2 cm,高程精度達(dá)到4 cm,精度指標(biāo)滿足設(shè)計(jì)要求。通過測(cè)試結(jié)果可以看出BDS+GPS的服務(wù)模式可以更加有效地利用衛(wèi)星資源,使衛(wèi)星星座構(gòu)成最佳的幾何結(jié)構(gòu),從而滿足提高導(dǎo)航定位精度的需要。在全省范圍的地基增強(qiáng)系統(tǒng)完成后,還應(yīng)對(duì)系統(tǒng)的服務(wù)范圍、系統(tǒng)服務(wù)的穩(wěn)定性等內(nèi)容進(jìn)行測(cè)試。
[1]李斌,馮澤,原彬.基于COMPASS的地基增強(qiáng)系統(tǒng)可用性分析[J].現(xiàn)代導(dǎo)航,2012(6):391-395.
[2]李作虎,楊強(qiáng)文,吳海玲,等.北斗地基增強(qiáng)系統(tǒng)建設(shè)與產(chǎn)業(yè)化發(fā)展[J].高科技與產(chǎn)業(yè)化,2014(10):59-65.
[3]劉愷,周萌,翁祖泉.北斗地基增強(qiáng)系統(tǒng)建設(shè)中的問題和建議[J].數(shù)字通信世界,2015(8):29-31.
[4]李康,鞏冠峰.GPS地基增強(qiáng)系統(tǒng)簡(jiǎn)介及其性能仿真驗(yàn)證[J].電光與控制,2013,20(8):89-94.
[5]王鍇華,楊海龍.內(nèi)河航運(yùn)CORS系統(tǒng)動(dòng)態(tài)測(cè)試新方法[J].水運(yùn)工程,2014(11):19-23.
[6]BRUYNINX C.Comparing GPS-only with GPS + GLONASS positioning in a regional permanent GNSS network[J].GPS Solutions,2007,11(2):97-106.
[7]NARDO A,HUISMAN L,TEUNISSEN P J G.GPS+GLONASS CORS processing:the Asian-Pacific APREF case[M].Berlin:Springer Berlin Heidelberg,2014:239-246.
[8]林國(guó)利,張文言,於永東,等.上海北斗連續(xù)運(yùn)行參考站系統(tǒng)(SHBD-CORS)的建設(shè)與精度測(cè)試[J].測(cè)繪通報(bào),2013(11):136-137.
[9]閆學(xué)東.銀川市YCCORS系統(tǒng)建設(shè)與應(yīng)用[J].測(cè)繪技術(shù)裝備,2013(4):67-70.
[10]陳錫春,譚志強(qiáng),李鋒.北斗用戶終端測(cè)試系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].無(wú)線電工程,2015,45(1):40-43.
[11]李健.衛(wèi)星定位連續(xù)運(yùn)行參考站網(wǎng)的系統(tǒng)架構(gòu)及軟件體系設(shè)計(jì)[D].鄭州:信息工程大學(xué),2007:1-96.
[12]劉紫平.成都理工大學(xué)CORS系統(tǒng)的建設(shè)與精度測(cè)試[D].成都:成都理工大學(xué),2011:1-74.
[13]王智超.單基站CORS-RTK精度測(cè)試與分析[D].大連:大連理工大學(xué),2013:1-62.
[14]袁宏超,秘金鐘,高猛,等.雙導(dǎo)航定位系統(tǒng)偽距單點(diǎn)定位方法與精度分析[J].導(dǎo)航定位學(xué)報(bào),2014,2(3):38-43.
Comparison of positioning performance of BDS ground-based augmentation system in different modes
YIN Ziming1,2,LIU Tianheng2,ZHANG Shuwei2,ZHOU Runyang2,YAN Jianqiao2
(1.Troops 524005,Zhanjiang,Guangdong 524005,China;2.College of Navigation and Aerospace Engineering,Information Engineering University,Zhengzhou,Henan 450001,China)
In order to further study on BDS GBAS,the location performance of BDS GBAS in Zhengzhou city,such as service timeliness,real-time static positioning accuracy and real-time dynamic positioning accuracy,was tested in the paper.The tests included positioning accuracy,inner accord precision,external accord accuracy and initialization time in the single GPS and BDS/GPS modes.Result showed that compared with GPS GBAS,the rover initialization time with differential data of BDS/GPS could be shortened and the positioning accuracy could be improved as the horizontal accuracy of 2 cm,and the altitude accuracy of 4 cm in the real-time high precision positioning.
BDS;GBAS;network RTK;positioning precision
2015-11-30
裝備預(yù)研基金項(xiàng)目(9140A24011314JB52001)。
尹子明(1990—),男,河北定州人,碩士研究生,研究方向?yàn)榛诘鼗鰪?qiáng)系統(tǒng)的BDS數(shù)據(jù)質(zhì)量分析。
10.16547/j.cnki.10-1096.20160314.
P228
A
2095-4999(2016)03-0064-05
引文格式:尹子明,劉天恒,張樹為,等.BDS地基增強(qiáng)系統(tǒng)單雙模定位性能比較[J].導(dǎo)航定位學(xué)報(bào),2016,4(3):64-68.(YIN Ziming,LIU Tianheng,ZHANG Shuwei,et al.Comparison of positioning performance of BDS ground-based augmentation system in dfferent modes[J].Journal of Navigation and Positioning,2016,4(3):64-68.)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45