模糊自適應PID控制的機器人運動控制研究
2016-09-20 02:47:14初紅霞李學良謝忠玉宋起超袁海燕張榮沂黑龍江工程學院電氣與信息工程學院哈爾濱150001
現代計算機 2016年6期
初紅霞,李學良,謝忠玉,宋起超,袁海燕,張榮沂(黑龍江工程學院電氣與信息工程學院,哈爾濱150001)
模糊自適應PID控制的機器人運動控制研究
初紅霞,李學良,謝忠玉,宋起超,袁海燕,張榮沂
(黑龍江工程學院電氣與信息工程學院,哈爾濱150001)
0 引言
移動機器人是一個集環境感知和行為控制與決策等多種功能于一體的綜合系統。移動機器人涉及到許多研究方向,其中運動控制是其最基本、也是非常重要的一個研究方向,它是移動機器人進行軌跡控制、定位和導航的基礎。移動機器人中運動控制的目標是能夠精確地實現點到點以及任意轉角運動控制。目前,機器人運動控制的研究算法有PID控制法和模糊智能控制法。PID控制具有精度高、通用性強和魯棒性好等優點,但需要精確的數學模型,并且參數的整定至關重要。智能PID技術是將智能控制和PID控制器相結合,由于集智能控制和PID控制兩種控制器的優勢,所以被廣泛應用。智能PID控制器根據采用不同的控制算法可以分為參數自適應PID控制器和非參數自適應PID控制器兩類;自適應PID控制器根據控制器參數設計的原理可分為極點配置自適應PID控制器[1]、神經網絡自適應PID控制器[2-3]、基于粒子群算法的自適應PID控制器[4-5]、模糊自適應PID控制器[6-7]等。本文旨在對模糊自適應PID算法進行研究,并把算法應用在機器人的運動控制上,從而提高運動控制的精度和準確性。
1 機器人控制系統中電機的模型
直流電機驅動系統如圖1所示。施加于電樞端的電壓u產生電樞電流i,i與磁鋼產生的磁通相互作用,產生的電磁轉矩Te驅動負載。
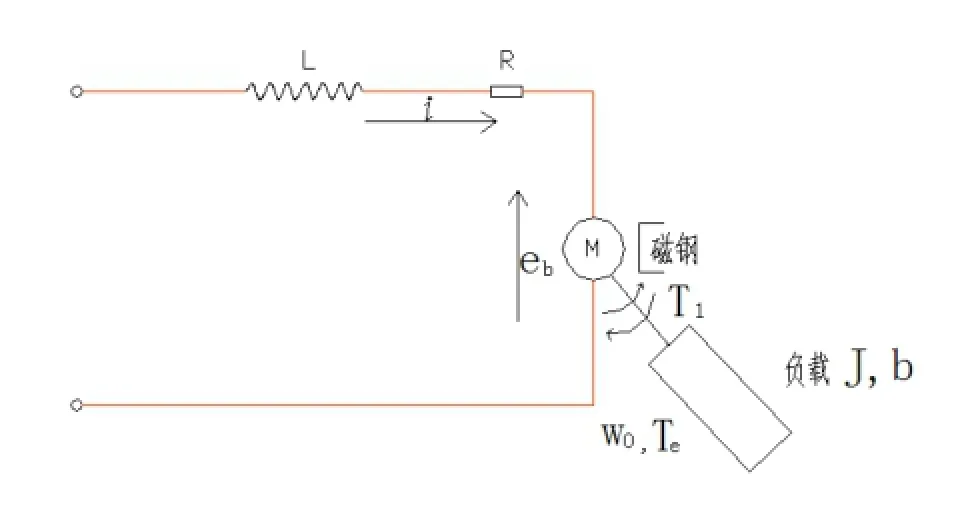
圖1 直流電動機驅動系統
在額定勵磁條件下,直流電機的電壓平衡關系為:

其中,R和L分別是電樞電阻和電樞電感,u為電樞電壓,i為通過電機的連續電流。反電動勢eb正比于轉速ω,即eb=keω,ke為反電動勢系數。
直流電機的機械平衡關系為:

式中,J是電動機和負載折合到電機軸上的轉動慣量,b是電機和負載折合到電機軸上的粘性摩擦系數,Tl是折合到電機軸上的總負載轉矩,ω為直流電動機轉速。電磁轉矩正比于電樞電流,即Te=kti,kt為轉矩系數。
聯立以上式子消去變量i、eb、Te,得到:
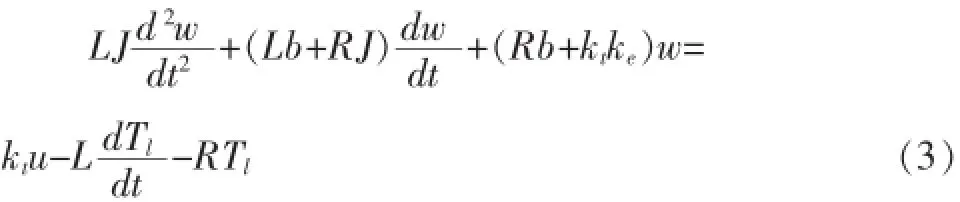
電樞控制式直流電機采用公制單位,轉矩系數與電動勢系數相等,即kt=ke=k。實際應用中可以假設Tl= 0,并且忽略粘性摩擦,由式(3)可以得到以ω為輸出量的電機微分方程:

對(4)式進行拉氏變換,得到傳遞函數:

式中,τe=為電樞回路電磁時間常數,τm=為電機系統的機電時間常數。
2 模糊自適應PID控制
模糊自適應PID的原理圖如圖2所示,即利用模糊推理來調節PID的Kp、Ki和Kd三個參數。
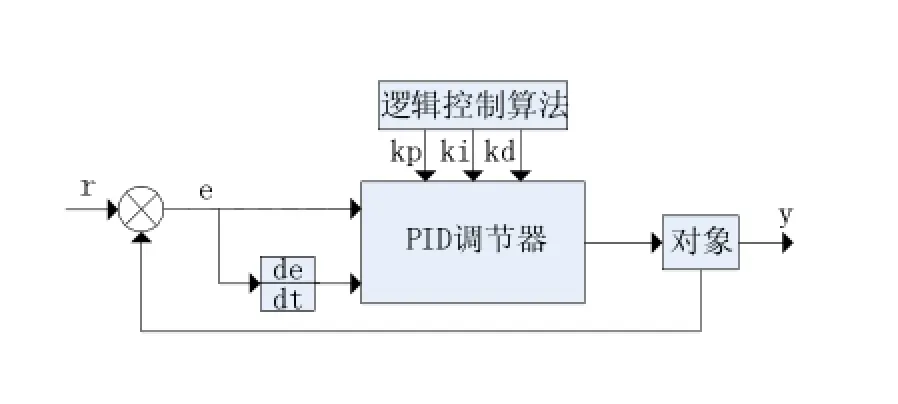
圖2 模糊自適應PID控制系統結構圖
為了驗證提出的模糊自適應PID算法進行機器人運動控制的有效性采用MATLAB/Simulink分別對單獨采用PID算法和模糊PID算法進行電機控制進行了仿真研究,這里以J57LYX10-ZS永磁直流力矩電動機為例,進行電機建模的仿真,電機的參數為:峰值堵轉電壓U=27V,峰值堵轉電流I=0.6A,峰值堵轉轉矩T= 1Nm,最大空載轉速120r/min,電樞電阻R=44.3Ω,電樞電感L=28.1mH,轉動慣量J=3×10-4Kg m2,仿真結果如圖3所示。
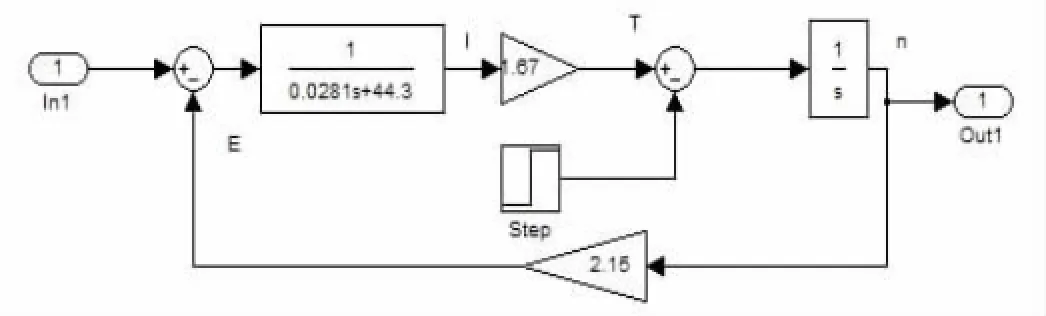
圖3 電機仿真圖
仿真結構圖如圖4和圖5所示。
仿真時電機的轉速設置為單位階躍函數,單獨采用PID算法進行電機速度控制是的三個參數的值為:Kp=50,KI=25,KD=0.02,未加擾動時的兩種算法的仿真結果如圖6所示,在10s時加入0.5N的擾動時兩種算法的仿真結果如圖7所示。從圖6和7可以看出,兩種算法都能實現電機的轉速控制,但是模糊自適應PID算法比單獨的PID算法具有較小的超調量,具有更好的穩定性,特別是添加擾動時,模糊自適應算法具有較短的恢復時間,提高了移動機器人的控制靈敏性,這都說明模糊自適應算法優于PID算法。而且當速度接近控制目標值時,該控制器可以避免超調,從而滿足對控制精度的設計要求。
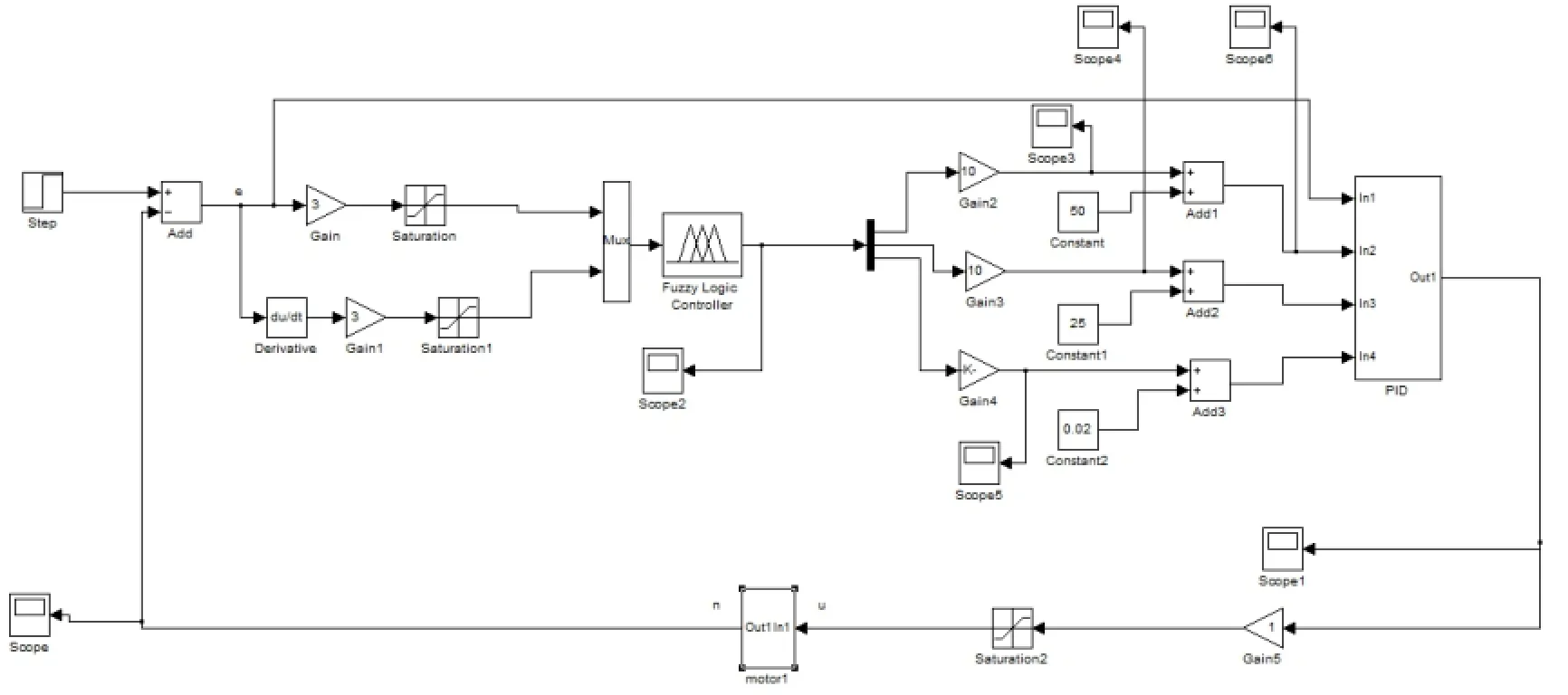
圖5 模糊PID控制算法的仿真結構圖
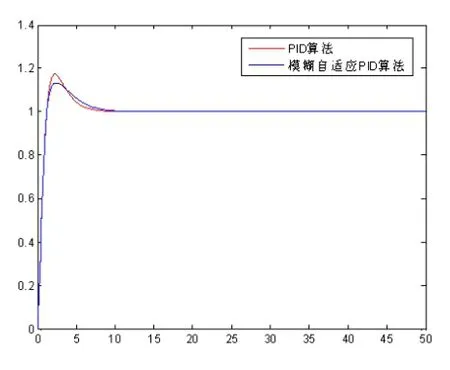
圖6 未加擾動時的兩種算法的仿真結果
3 結語
針對傳統PID控制進行機器人的運動控制效果不理想的問題,本文主要研究了模糊自適應PID控制算法,并把該算法用于機器人的運動控制中。通過對移動機器人的研究和試驗,結果表明本文所設計的運動控制策略能夠很好地滿足機器人運動控制方面的設計要求,也提高機器人運動控制的精度和準確性。
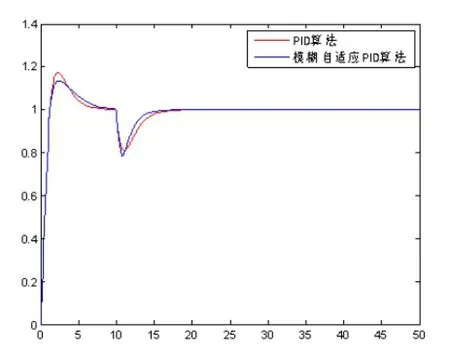
圖7 加入0.5N的擾動時兩種算法的仿真結果
[1]張光磊,齊紅,賈鶴鳴.基于極點配置的智能體 PID運動控制器參數優化[J].中山大學學報(自然科學版),2015.54(7):23-27.
[2]張彬.基于改進神經網絡的PID整定[J].現代計算機,2012,10(28):3~6.
[3]梁宇恩,錢飛,許素安.基于單神經元PID控制器的壓電陶瓷控制方法[J].計算機測量與控制,2015.23(11):3657-3660.
[4]謝文杰,郭正光.基于粒子群算法下的PIDNN解耦控制[J].現代計算機,2013,4(12):3-8.
[5]于立群,陳佳,劉繁明.基于改進粒子群算法的PID神經網絡解耦控制[J].智能系統學報,2015,10(5):1-6.
[6]田琦,李琪,姚鵬.基于模糊PID的全方位移動機器人運動控制[J].電子科技,2011.24(9):131-134.
[7]林俊,林凱,王蘇衛.移動機器人模糊控制與模糊自適應PID控制[J].計算機仿真,2014,28(4):167-171.
Fuzzy Adaptive;PID Control;Motion Control
Research on Motion Control of Robot with Fuzzy Adaptive PID Control
CHU Hong-xia,LI Xue-liang,XIE Zhong-yu,SONG Qi-chao,YUAN Hai-yan,ZHANG Rong-yi
(College of Electrical and Information Engineering,Heilongjiang Institute of Technology,Harbin 150001)
1007-1423(2016)06-0011-04
10.3969/j.issn.1007-1423.2016.06.003
初紅霞(1976-),女,講師,哈爾濱,博士,研究方向為模式識別、智能控制
李學良(1991-),男,本科生,學生,研究方向為自動化專業
謝忠玉(1974-),女,講師,哈爾濱,博士,研究方向為模式識別
宋起超(1973-),男,教授,哈爾濱,博士,研究方向為電氣自動化
袁海燕(1982-),女,副教授,哈爾濱,博士,研究方向為數學建模
張榮沂(1962-),女,教授,哈爾濱,碩士,研究方向為電氣自動化
2015-12-17
2016-02-20
基于移動機器人的運動機理,對其運動控制進行研究。確立機器人控制系統的電機模型;然后通過對機器人系統的動力學特性和移動控制特性的分析,給出基于模糊自適應PID控制的機器人運動控制方法,仿真實驗結果表明該算法可實現機器人運動控制系統的有效控制。
模糊自適應;PID控制;運動控制
哈爾濱市科技局科技創新人才研究專項資金項目(No.2014RFQXJ103)、黑龍江省教育廳科學技術研究項目(No.12531540)、黑龍江工程學院大學生創新訓練項目(No.201511802071)
Based on the movement mechanism of mobile robot,studies the motion control.Establishes the motor model of the robot control system, through the dynamic characteristics of robot system and mobile control characteristic analysis,gives a robot motion control based on fuzzy adaptive PID control method,the simulation results show that the algorithm can realize the effective control of the robot motion control system.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
制造技術與機床(2017年3期)2017-06-23 08:11:21