彈道導彈中段誘餌微動特性研究
2016-09-20 08:19:56王偉林雷勇軍國防科學技術大學航天科學與工程學院湖南長沙410073
系統工程與電子技術 2016年3期
王偉林,陳 磊,雷勇軍(國防科學技術大學航天科學與工程學院,湖南 長沙410073)
彈道導彈中段誘餌微動特性研究
王偉林,陳 磊,雷勇軍
(國防科學技術大學航天科學與工程學院,湖南長沙410073)
微動辨識是彈道導彈中段目標識別領域的研究熱點,目標的微動特性與其結構、質量分布、初始狀態和受力狀態密切相關,將根據給定誘餌的重量、幾何特性、釋放初始狀態等,建立誘餌進動、自旋、章動等微運動模型,對微動模型進行深入研究和理論推導,分析得到釋放后誘餌的姿態角變化特性、自旋周期、章動角、章動角速率和歐拉角等微運動特征。仿真結果表明文中建立的微動模型,可以有效的對彈道導彈中段誘餌的微動特性進行分析,對比與彈頭微運動特征的差異,可以有效的為彈道中段目標識別提供依據。
微動;彈道導彈中段;目標識別;模型;誘餌;彈頭
網址:www.sys-ele.com
0 引 言
彈道導彈的突防技術是指彈道導彈為無損傷地通過反導防御系統攔截區,在助推段、中段、末段所采取的對付敵方反導防御系統一切探測攔截手段的技術,是衡量彈道導彈武器系統戰術技術性能和武器研制水平的重要標志。包括誘餌技術、彈頭隱身、有源干擾技術、彈頭機動技術、多彈頭技術等。突防方經常一起使用多種突防措施以達到良好的突防效果[1-2]。
在彈道導彈飛行中段,大氣極為稀薄,可以認為導彈是在真空中飛行,此段彈道的射程和飛行時間占全彈道的80%~90%以上,因此容易遭到自動尋的導彈的跟蹤攔截。在中段防御上,美國導彈防御局采用國家導彈防御計劃中已驗證的技術,進行了多次地基防御攔截試驗和海基防御攔截試驗。通過大量的飛行試驗搜集各類彈頭和誘餌的運動特性,根據導彈飛行過程中呈現的預期特征,建立了匹配識別的特征模板庫,并在攔截試驗中對不同目標的運動特性的識別能力進行驗證[3]。
可見導彈目標的特性研究對目標識別起到至關重要作用。而目前對誘餌等目標特性的分析主要集中在對軌道特性的分析,缺少對微動特性的分析。微動特性是指誘餌除質心平動以外的運動,如自旋、進動、章動等。中段飛行過程中,彈頭和誘餌的軌道特征差異不大,微動特性有較大區別,通過微多普勒效應分析,可以識別出彈頭和誘餌[4]。
近年來,微動得到了廣泛的關注,微動辨識成為彈道目標識別領域的研究熱點[5-8],如文獻[9]研究了不同形式雷達信號對微動導彈目標的特征提取技術,文獻[10]分析了雷達觀測下的目標擺動模型,文獻[11-12]分析了錐形目標的微動模型及其微多普勒,但都是基于文獻[13-14]提出的錐形目標的自旋模型和錐旋模型,文獻[15-17]也對微動模型開展了部分研究和微多普勒仿真驗證。上述研究都沒有對微動模型進行深入研究和理論推導,目標的微動特性與其結構、質量分布、初始狀態和受力狀態密切相關,鑒于中段突防誘餌釋放于大氣層外,本文將參照航天器姿態運動理論[18],根據給定誘餌的重量、幾何特性、釋放初始狀態等,建立誘餌進動、自旋、章動的微運動模型,分析釋放后誘餌的姿態角變化特性、自旋周期、章動角等微運動特征,并分析與彈頭微運動特征的差異,從而為彈道中段目標識別提供依據。
1 微動動力學模型
不受外力矩情況下,體坐標系內建立的繞質心轉動方程為

式中,ω為誘餌瞬時轉動角速度矢量;角動量矢量H=Iω;I為誘餌相對于質心的慣量張量矩陣

式中,將Ixx,Iyy,Izz簡化為Ix,Iy,Iz表示。如果三體軸均為慣量主軸,則其姿態動力學方程可簡化為

2 微動特性分析
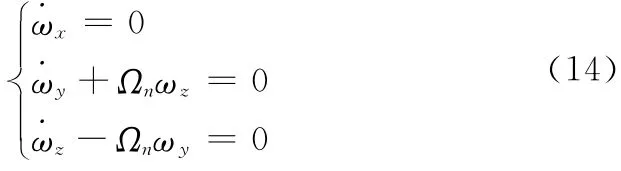
設體坐標系的三軸為剛體對質心的慣量主軸,Ix,Iy和Iz為相應的主慣量,慣量積等于零。假定仿形輕誘餌對自旋軸oxB是軸對稱的[19],繞通過質心的橫軸的橫向慣量都相等,Iy=Iz。
由式(3)第一個方程得出ωx等于常值,所以誘餌的自旋運動是獨立的,與橫向運動沒有耦合作用。令Iz=Iy= It,ωx=ωs,Ωn=(Ix/It-1)ωs,動力學方程簡化為

設置積分初始參數:ωx(0)=ωs,ωy(0)=ωy0,ωz(0)= ωz0,則式(4)解為

在本體坐標系中,角速率分量ωy,ωz周期性的變化,周期為2π/Ωn,自旋轉速始終為常數ωs。ωy,ωz的合成角速率矢量ωt,稱為橫向角速率矢量,幅值為橫向角速率矢量ωt繞oxB軸旋轉,轉速為Ωn,因此誘餌的瞬時轉速ω繞自旋軸作圓錐運動,圖1給出了誘餌自旋瞬時轉速分解的示意圖。
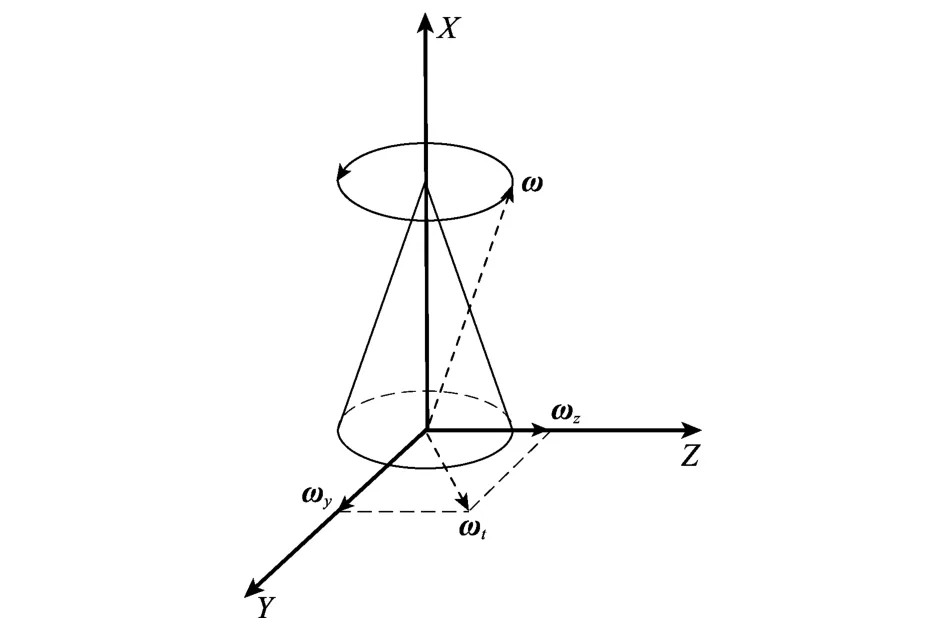
圖1 誘餌自旋特性示意圖
在本文中假定錐形誘餌高1.5 m,半徑0.5 m,質量為M= 1 kg。轉動慣量Ix=0.075,Iy=Iz=0.122。Iy=Iz>Ix,因此Ωn<0,轉速ω做圓周運動的方向和自旋轉速ωx反向。
為進一步說明誘餌自旋軸的運動規律,定義空間中固定的角動量矢量為

角動量矢量H由橫向、軸向兩部分組成,因為這兩部分旋轉著的矢量的合成矢量H在空間中定向,因此由于橫向角速率ωt繞自旋軸旋轉,導致自旋軸也作圓錐運動。因此合并式(5)和式(6),可以將瞬時轉速矢量ω投影為

式中,eh為沿角動量方向的單位矢量。
ω矢量將同時做兩種圓錐運動:一種是繞誘餌主慣量軸x的圓錐運動(本體錐),轉速為Ωn,稱為本體章動速率;另一種是繞角動量H做的圓錐運動(進動,空間錐),旋轉速度是Ω=H/It,稱為空間章動速率。誘餌的姿態運動是誘餌繞自旋軸旋轉,同時本體錐在空間錐滾動。由式(7)知ω、H、x這3矢量共面,自旋軸也繞角動量H做圓錐運動,速率為Ω,x軸與H的夾角θ稱為章動角。如果章動角隨時間不變化,則誘餌的運動是進動。如果章動角隨時間波動,則誘餌的運動稱為章動,即章動是在進動的基礎上再加上章動角的波動[20]。
章動角的計算公式為

式(8)說明軸對稱自旋誘餌的章動角是常值,所以如果誘餌具有軸對稱性,章動等同于進動。角動量由軸向角動量Ixωx和橫向角動量Itωt,他們之比等于章動角的正切,
上文給出了誘餌在體坐標系下的微動特性分析,下面研究誘餌在發射慣性系下的繞質心運動方程。首先,給出發射慣性系與誘餌本體坐標系(彈體坐標系)的歐拉角關系圖,如圖2所示。
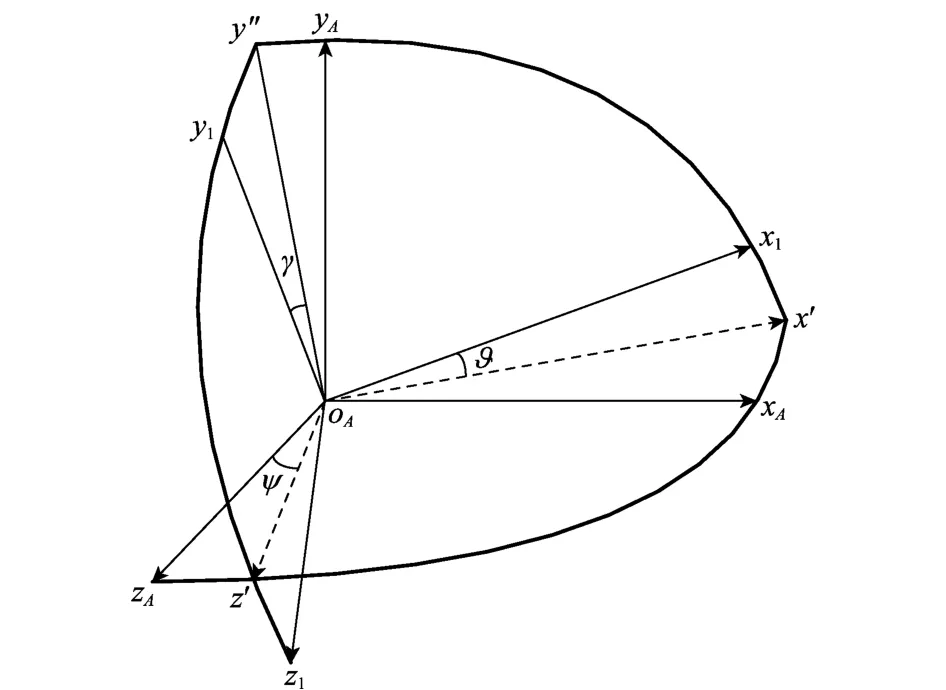
圖2 發射慣性系與彈體坐標系的轉換
依據圖2給出發射慣性系A與彈體坐標系B之間的轉換。彈體按先偏航、再俯仰、后滾動的“yzx”旋轉順序,從發射慣性系旋轉至彈體坐標系,偏航角為、俯仰角為、滾動角為γ。BA表示由A系到B系的轉移矩陣,AB表示由B系到A系的轉換矩陣,則有[21]

以k0,k1,k2表示yA,z′,x1方向的單位矢量,體坐標系是由發慣系作3次轉動形成,轉動角速度為,,γ,根據角速度的矢量合成法則,剛體在慣性系的角速度為

以體坐標系中矢量表示的角速度:

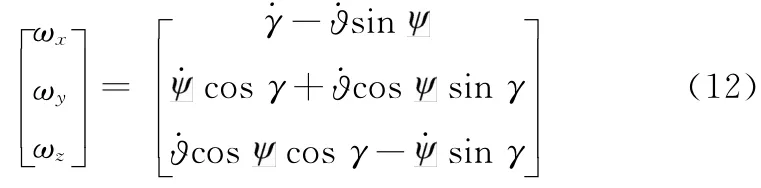
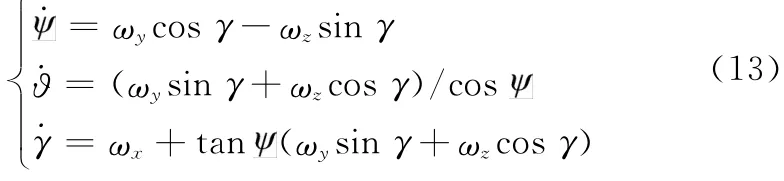
結合第2節中求得的式(4):
聯立求解上述微分方程,可以得到誘餌在發射慣性系中俯仰角、偏航角、滾動角的值。
3 仿真算例
3.1 誘餌微動特性求解
本節給定初始值,求解對應的微動參數。仿真初始參數設置如下:則求得其轉動慣量:


式中,Iz=Iy>Ix。
從而求得其章動角速率:

由式(5)得到在本體坐標系中角速率的分量:
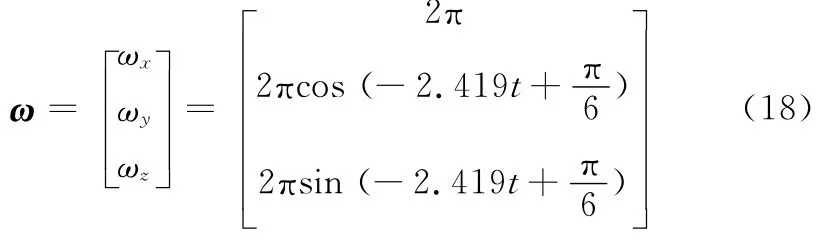
從而求得角速率大小為:|ω|=8.89 rad/s。
由式(8)知,軸對稱自旋誘餌的章動角是常值:

空間章動速率:

3.2 誘餌微動特性影響因素
為分析誘餌釋放時的初始角速率對誘餌的微動運動的影響,本節將改變初始參數,并分析其影響。
(1)首先對沿y,z軸方向的初始釋放角速率的影響進行分析。因為

假定誘餌繞各軸的轉動慣量以及ωs,φ等參數不變,令ω0取值從0逐步增加到5π,看對應的章動角、本體章動角速率、空間章動角速率的變化情況。
由圖3~圖5的變化曲線可以看出,隨著初始角速率ω0的增加,章動角θ變大,本體章動角速率對應Ωn保持不變,空間章動角速率Ω逐漸變大,驗證了式(20),當θ∈[0 π/2]時,θ和Ω有相同變化趨勢。
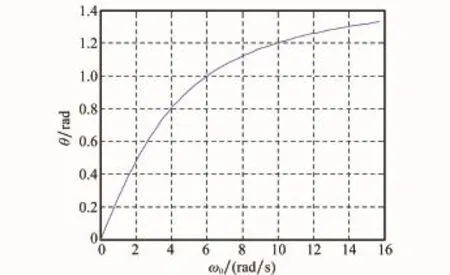
圖3 章動角變化規律曲線圖
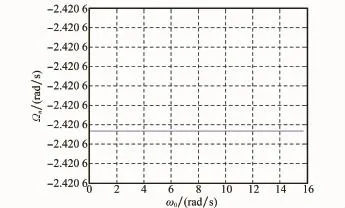
圖4 本體章動角速率變化規律曲線圖
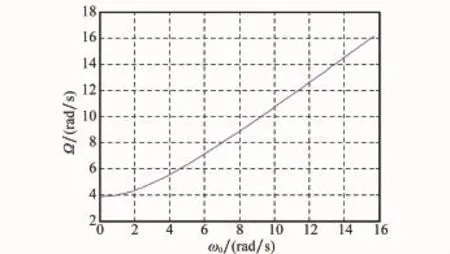
圖5 空間章動角速率變化規律曲線圖
(2)下面研究當誘餌繞各軸的轉動慣量以及ω0,φ參數不變,自旋轉速ωs取值從0~5πrad/s時,對應的章動角θ、本體章動角速率Ωn、空間章動角速率Ω的變化情況。
圖6~圖8分別給出了章動角、本體章動角速率、空間章動角速率的變化曲線。隨著自旋轉速ωs的增加,章動角逐漸變小,本體章動角速率逆向增大,空間章動角速率逐漸增加。
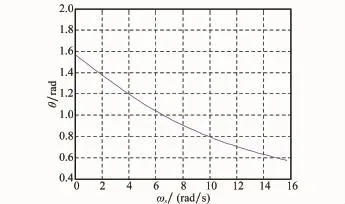
圖6 章動角變化規律曲線圖
由圖3和圖6對比可知,轉速ωs和ω0增大,對章動角的影響是相反的,側面反映誘餌飛行穩定性的變化。
3.3 彈頭微動特性求解
自旋穩定的彈頭,由于彈箭分離以及誘餌釋放時的橫向干擾,彈頭在中段飛行中將發生進動。
彈頭的初始角速度要低于誘餌的角速度,錐形彈頭高1.5 m,半徑0.5 m,參照圖1,質量為M=100 kg,轉動慣
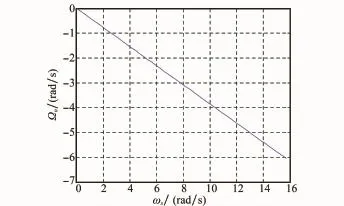
圖7 本體章動角速率變化規律曲線圖
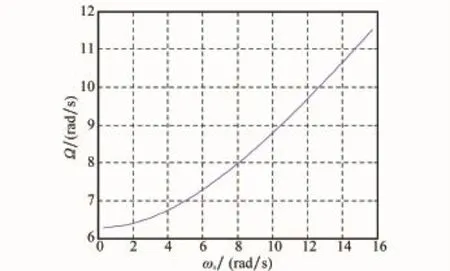
圖8 空間章動角速率變化規律曲線圖
因此彈頭的橫向轉動慣量和縱向轉動慣量均很大,在受到橫向干擾時,彈頭比誘餌更容易保持穩定,其進動角通常較小。同時因為Iz=Iy>Ix,因此Ωn<0,轉速ω做圓周運動的方向和自旋轉速ωx反向,對旋轉對稱目標而言,自旋運動不會產生微多普勒效應。
仿真初始參數:
因為轉動慣量Iz=Iy>Ix,從而求得其章動角速率:

得到在本體坐標系中角速率的分量:
由式(24),求得本體坐標系中角速率大小為

軸對稱自旋誘餌的章動角是常值:

空間章動速率:

因為設計的仿形輕誘餌與彈頭外形相同,雖然兩者轉動慣量差別較大,但因為3個方向轉動慣量的比值相同,其章動角的大小是相同的。但考慮到其給定的初始角速率不等,由式(23)知,其章動角速率并不相同,可以作為彈頭和誘餌識別的依據。
如果誘餌不是仿形誘餌,其轉動慣量不是對應成比例,則其章動角、章動角速率等參數也存在差別,因此會更易于雷達識別。
3.4 發射慣性系下歐拉角的求解
下面求解發慣系下的歐拉角,設置仿真初始參數如下:

令ωx(0)分別取值0.1π,0.5π,2π,選擇仿真時間為50 s。
下面給出不同初始條件下的仿真結果,并進行對比分析。
圖9~圖11給出了誘餌在發射慣性系中俯仰角、偏航角、滾動角隨時間的變化曲線。圖12~圖14給出了誘餌在彈體系中轉動速率隨時間變化曲線。由以上各圖可以發現,初始時刻繞誘餌主軸的自旋轉速影響誘餌的俯仰角和偏航角變化周期和最大幅值,初始轉速越大,其周期越短,幅度變化越小,而滾動角的累加效果越明顯。

圖9 誘餌俯仰角的變化曲線
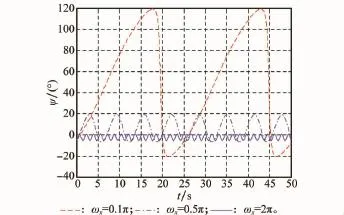
圖10 誘餌偏航角的變化曲線

圖11 誘餌滾動角的變化曲線圖
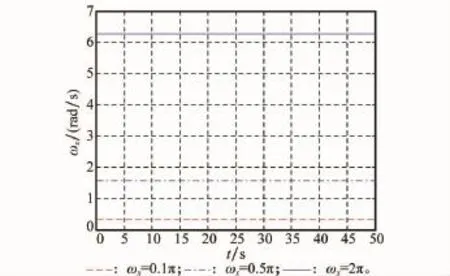
圖12 誘餌沿X軸轉動速率
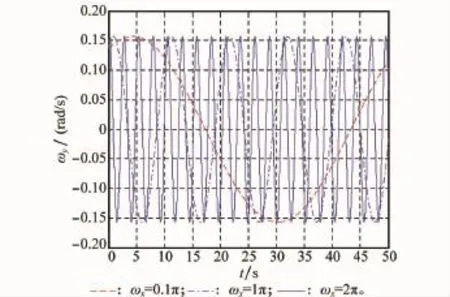
圖13 誘餌沿Y軸轉動速率圖

圖14 誘餌沿Z軸轉動速率
4 結 論
本文基于航天器姿態動力學與控制理論,建立了軸對稱仿形輕誘餌的一般性微運動模型,根據給定誘餌的重量、幾何特征和釋放的初始狀態等,解析推導得到釋放后誘餌的姿態角、自旋周期、章動角、章動角速率以及發慣系下歐拉角等微動參數。通過仿真,研究了初始參數改變后,誘餌微動特性的變化,驗證了公式的正確性;并對比了同形狀彈頭的微動特性,兩者微動特征存在的差異可以為彈道中段目標識別提供依據。
[1]H u B,Li Z.Key penetration technologies and develop ment of abroad ballistic missile[J].Tactical Missile Technology,2010,26(2):124-128.(胡波,李壯.國外彈道導彈突防的關鍵技術與發展[J].戰術導彈技術,2010,26(2):124-128.)
[2]Fetter S,Sessler AM,Cornwal l J M,et al.Countermeasures:a technical evaluation of the operational effectiveness of the planned US national missile defense system[M].M A:U nion of Concerned Scientists MIT Security Studies Program,2000.
[3]United States Department of Defense.Ballistic missile defense review report[R].Washington,2010.
[4]Camp WW,Mayhan J T,O’Donnell R M.Wideband radarfor ballistic missile defense and range Dopplerimaging of satellites[J].Lincoln Laboratory Journal,2000,12(2):267-280.
[5]Chen V C.Advances in applications of radar micro-Doppler signatures[C]∥Proc.of the IE E E Conference on Antenna M easurements&A pplications,2014:1-4.
[6]Clemente C,Balleri A,W oodbridge K,et al.Develop ments in target micro-Doppler signatures analysis:radar imaging,ultrasound and through-the-wall radar[J].E U R A SIP Journal on A dvances in Signal Processing,2013,2013(1):1-18.
[7]Stankovic L,Thayaparan T,Dakovic M,et al.Micro-Doppler rem ovalin the radarimaging analysis[J].IE E E Trans.on Aerospace and Electronic Systems,2013,49(2):1234-1250.
[8]Jung J H,Kim K T,Kim S H,et al.Micro-Doppler extraction and analysis of the ballistic missile using R D A based on the real flight scenario[J].Progress in Electromagnetics Research M,2014,37:83-93.
[9]Liu LH,Des M,M ounir G,et al.Ballistic missile detection via micro-Doppler frequency estimation fro mradar return[J]. Elsevier Digital Signal Processing,2012,22(1):87-95.
[10]Lei P,Liu YX,Li K L.Micro-motion identification and maximum swing angle estimation of cone-shaped wobbling targets[J].Systems Engineering and Electronics,2013,35(8):2258-2262.(雷鵬,劉永祥,李康樂,等.擺動錐體運動辨識及最大擺動角估計[J].系統工程與電子技術,2013,35(8):2258-2262.)
[11]Zhang J K,Dai D H,Xing S Q,et al.Analysis ofin SA R 3D imaging characteristics of target with rotational micro-motion[J]. Journal of Astronautics,2014,35(3):345-355.(張靜克,代大海,刑世其,等.旋轉微動目標InSA R三維成像特性分析[J].宇航學報,2014,35(3):345-355.)
[12]Gao H W,Xie L G,W en S L,et al.A nalysis and extraction of micro Doppler induced by cone shaped target’s wobbling[J]. Chinese Journal of Electronics,2008,36(12):2497-2502.(高紅衛,謝良貴,文樹梁,等.擺動錐體目標微多普勒分析和提取[J].電子學報,2008,36(12):2497-2502.)
[13]Chen V C,Li F Y,H o S S,et al.Micro-Doppler effectin radar phenomenon,model and simulation study[J].IE E E Trans.on Aerospace and Electronic Systems,2006,42(1):2-21.
[14]Chen V C.T he micro-Doppler effect in radar[M].M A:Artech House,2011.
[15]Sun Y J,Fu Y,Cheng Z,et al.Q uaternion based micro-Doppler simulation of ballistic targets[C]∥Proc.of the IE T International Radar Conference,2013:80-85.
[16]Wang T,Wang X,Chang Y,et al.Estimation of precession parameters and generation of ISAR images of ballistic missile targets[J].IE E E Trans.on Aerospace and Electronic Systems,2010,46(4):1983-1995.
[17]Lei P,Wang J,Sun J.Analysis of radar micro-Doppler signatures from rigid targets in space based on inertial parameters[J].IE T Radar,Sonar&Navigation,2011,5(2):93-102.
[18]Markley F L,Crassidis J L.Fundamentals of spacecraft attitude determination and control[M].New York:Springer,2014.
[19]Chen F Y,Zhao L,Zhang Q G,et al.Profile m odeling light decoy spatial attitude control design[J].Modern Defense Technology,2010,38(4):83-87.(陳方予,趙蕾,張其剛,等.仿形輕誘餌空間定姿初探[J].現代防御技術,2010,38(4):83-87.)
[20]Zhang R W.Spacecraftattitude of dynamics and control[M]. Beijing:Press of Beihang University,1998.(章仁為.衛星軌道姿態動力學與控制[M].北京:北京航空航天大學出版社,1998.)
[21]Siouris GM.Missile guidance and control systems[M].New York:Springer Science&Business Media,2004.
Micro-motion analysis of decoy in midcourse of ballistic missile
WANG Wei-lin,C H E N Lei,LEI Yong-jun
(College of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China)
Micro-motion identification of the decoy in midcourse of ballistic missile has aroused general interest in current society,and decoy’s structure,quality distribution,initial state and externalforce are essential to the micro-motion property of the decoy.The micro-motion model of the decoy,including the self-spin,procession and nutation,is established based on the quality,geometrical character and initially released state.With a deep research into the micro-motion model and theoretical derivation,the change rate of the attitude angle,self-spin period,nutation angle and nutation angle rate are achieved.Numerical simulations demonstrate the effectiveness of the proposed approach,which can act as a basis for the targetidentification in comparison with the micro-motion property of warhead.
micro-motion;midcourse of ballistic missile;target identification;model;decoy;warhead
TN95
A
10.3969/j.issn.1001-506 X.2016.03.02
1001-506 X(2016)03-0487-06
2014-11-21;
2015-05-07;網絡優先出版日期:2015-09-29。
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150929.1111.002.html
國家自然科學基金(11372345)資助課題
王偉林(1988-),男,博士研究生,主要研究方向為飛行器動力學與制導控制。
E-mail:wangweilin@nudt.edu.cn
陳 磊(1974-),男,教授,博士,主要研究方向為攔截動力學與制導控制、空間目標碰撞預警。
E-mail:clwhl@263.net
雷勇軍(1968-),男,教授,博士,主要研究方向為計算固體力學理論與應用。
E-mail:leiyj108@nudt.edu.cn