改進聲矢量陣相干信號源方位估計算法
2016-09-20 08:20:07馬伯樂程錦房海軍工程大學兵器工程系湖北武漢430033
系統工程與電子技術 2016年3期
關鍵詞:信號
馬伯樂,程錦房(海軍工程大學兵器工程系,湖北 武漢430033)
改進聲矢量陣相干信號源方位估計算法
馬伯樂,程錦房
(海軍工程大學兵器工程系,湖北武漢430033)
為提高聲矢量陣相干信號方位估計能力,針對二維緊湊結構的聲矢量均勻線陣情況,給出一種改進算法。該算法首先利用解析振速與聲壓信息,重構接收數據,求出協方差矩陣,并提取信號子空間第一列的3個分矢量進行孔徑擴展。然后,利用類單塊拍條件下的矩陣重構得到3個新矩陣并合并。最后,套用奇異值分解的多重信號分類算法得到目標波達方位估計。分析表明,所提算法利用數據的組織形式使信號矩陣對角化,最終恢復了矩陣的秩,而且具有一定的孔徑擴展能力。同時,所提算法矢量陣陣列流形所具備的方向因子可以在模糊角度處形成抑制,保留了矢量陣的單邊指向性。仿真結果證明,此算法無論在角度估計精度還是分辨率方面都要優于矢量陣空間平滑與矢量平滑算法。
相干信號;空間平滑;矢量平滑;解析振速
網址:w w w.sys-ele.co m
0 引 言
聲矢量水聽器是由兩或三個正交的方向振速傳感器與一個可選的聲壓傳感器構成。這種結構可以使聲矢量傳感器同時測量某點處的聲壓與振速信息[1]。因此,聲矢量傳感器對水聲信號的感知要比傳統標量(聲壓)水聽器更精確[2]。同時單個矢量水聽器具有不依賴頻率的單邊指向性和抗各向同性噪聲能力。正是由于以上這些優勢,相比于聲壓陣,矢量陣的目標探測性能要更優越。
多年來,包括聲矢量陣波達方向(direction of arrival, DOA)估計在內的矢量水聽器目標方位估計,已經得到了大量研究[3-6]。總結現有的矢量陣方位估計,其常用的思路是將聲壓陣的一些DOA估計及改進算法直接應用到矢量陣的長陣列形式中,這種處理能很好利用矢量水聽器的單邊指向性,做到全空間無模糊定位。特別是基于矢量陣的子空間類DOA估計法,由于其高分辨能力,已成為目前矢量陣目標方位估計最為流行的算法。然而,這些算法大多是基于非相干信號源的情況。在相干信號情況下,由于協方差矩陣秩的虧損,會導致估計性能的下降。為此對于相干信號情況,首先必須對接收信號的協方差矩陣進行預處理,使其秩得以恢復,再利用相應的子空間算法實現DOA估計。空間平滑是最早提出,也是最早被用于矢量陣的一種解相干算法。它是利用均勻線陣的不變性,將整個陣列劃分為多個子陣,然后對多個子陣的協方差矩陣進行求和平均,從而實現秩的恢復[7],文獻[3,8]就是這種解相干處理與傳播算子算法結合的矢量陣相干信號方位估計的成功案例。但是,陣列孔徑損耗一直是這類算法的缺陷。為此針對矢量陣情況,文獻[9-10]給出了一種基于矢量平滑的解相干算法,此類算法是利用兩個振速矢量陣與聲壓陣協方差矩陣的求和平均來抑制相干項,從而實現無孔徑損耗的方位估計,但由于振速信息用于相干項抑制,其單邊指向特性喪失,因此無法實現全空間無模糊角度估計。
近年來,針對矢量陣相干信號DOA估計又出現了許多新方法,文獻[2]針對L型的矢量陣,利用兩個陣列的互相關矩陣解除相干性,然后套用旋轉不變子空間算法與傳播算子算法實現方位估計。這兩種算法不但有效解除相干性,而且可以避免空間遞歸搜索,并且具有一定的孔徑擴展能力。文獻[7]給出了一種基于稀疏分布結構的矢量陣相干信號方位估計算法,保留了矢量水聽器的抗左右舷模糊能力,并且無需空間遞歸搜索,大大減少計算量。文獻[11]利用文獻[12]的方法實現了單快拍條件下的矢量陣相干信號目標的方位估計與跟蹤,但這種處理法,是利用聲壓,振速成分的矩陣形式完成解相干,因此其可識別信源數受矢量水聽器通道數限制,會造成陣列孔徑的浪費。
借鑒文獻[12]的思路,本文針對二維緊湊結構的聲矢量均勻線陣相干信號DOA估計,給出一種改進算法,這種算法不但可以保留矢量陣的抗左右舷模糊能力,而且具有一定的孔徑擴展能力。
1 矢量陣空間平滑與矢量平滑
1.1 信號模型與基本條件
本文的基本假設:
(1)本文的信號假設為平穩各態歷經的遠場平面波。
(2)本文的噪聲為各向同性噪聲場;噪聲滿足高斯白分布。
(3)信號與噪聲間統計獨立。
(4)本文陣列形式為均勻線陣
(5)本文所探討的矢量陣為緊湊二維矢量水聽器。假設一個半波間隔均勻線陣,如圖1所示。
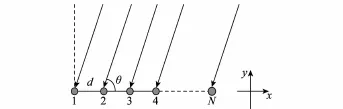
圖1 均勻線陣示意圖
陣列由N個矢量傳感器構成,陣元間距為d;信號入射方向與陣列法線成θ。考慮K個窄帶信號,其接收信號為

式中,A(θ)為信號方向矢量矩陣,其基本形式為

接收數據協方差矩陣為

式中,Rs為信號的協方差矩陣,Rn為噪聲協方差矩陣,其維度為3N×3N,表示為

1.2 空間平滑算法與矢量平滑算法
空間平滑預處理是將上述N個陣元個數的陣列劃分為L(L≥k+1)個相互重疊的子陣列,子陣陣元個數為p(p≥k+1),并且滿足N=L+p-1,于是每個子陣的協方差矩陣為

式中,jj=1,2,…,L;Ac(θ)為第一個子陣的陣列流形;Λ為


矢量平滑預處理是將聲壓、振速分別寫成3個協方差矩陣形式
式中,Rvc1,Rvc2,Rvc3分別為聲壓陣、振速x陣、振速y陣協方差矩陣;Ap(θ)為聲壓陣陣列流形。

最后得到矢量平滑協方差矩陣為

通過上述兩種處理,協方差矩陣的秩都可以得到恢復,但從表達式可見,空間平滑算法有陣列孔徑損耗,但矢量平滑很好保留了陣元個數。然而,矢量平滑算法由于方向信息參與解相干,其抗左右舷模糊能力喪失(下文將給出理論描述)。因此,如何在解除相干性同時,保留矢量陣優勢,并且盡量減小孔徑損耗,便是本文研究的重點內容。
2 改進的聲矢量陣相干信號DOA估計算法
首先將兩個振速陣列改寫成2個解析形式為

式中,Vx,Vy分別為振速x,振速y陣列,于是可得一個長陣列形式

然后求得協方差矩陣為

其中

式中,Ran為維數為3N×3N的噪聲協方差矩陣,并且,由于噪聲為各向同性噪聲,不難推導可得,Ran=diag[1…1]。注意此處的噪聲協方差矩陣與式(4)不同,已經成為一個對角元素相等的對角陣。根據文獻[13]的定理可得,在上述噪聲協方差矩陣條件下,Ra特征分解后,對應最大特征值的特征向量可寫成

由于式(21)的結論的得來,必須要求Ran形式的噪聲協方差矩陣形式,這也是數據要經過上述處理的原因。其中,a(j)為實加權系數;αa(θj),j=1,2,…,k為各信號源對應的導向矢量。取出ε1,ε2,ε3:
對ε1,ε2,ε3取共軛倒置,其表達式為
式中,A′p(θ)為Ap(θ)的共軛倒置,其表達式為


由此可見,式(26)的陣列流形的總陣元數變為2N-1,定義選擇矩陣

式中,ENsub為Nsub×Nsub維的單位對角陣,于是可以得到
此處需要滿足2N-1=Nsub+L-1。式(28)可寫成
式中

式中
然后將Ynew1,Ynew2,Ynew3上下合并為一個矩陣為
從式(34)可見,最終的新矩陣的信號部分矩陣Λs為一個維數與信源數一致的對角陣,因此不難證明Rnew的秩為信源數k,于是可以直接對式(34)采用MUSIC算法。對式(34)進行奇異值分解得到噪聲子空間Un,然后得到空間功率譜為

式中,Ψ(θ)是形式與式(35)對應的任意角度的導向矢量。總結本文算法的步驟如下:
步驟1 采用式(14)~式(18)的方法重組數據。
步驟2 采用式(21)~式(25)方法得到3個矢量。
步驟3 采用式(27)~式(34)方法構造最后的處理矩陣。
步驟4 利用式(36)得到空間功率譜。
3 性能分析與比較
本文相干信號處理的目的旨在恢復秩的同時,保留聲矢量陣特性及減少陣列孔徑的損耗。因此,本節從最少所需陣元數與抗左右船舷模糊兩方面分析比較本文算法、空間平滑算法與矢量平滑算法的性能。
3.1 最少所需陣元數比較
對本文算法,有2N-1=Nsub+L-1取L=k,并且為了能得到式(36)的噪聲子空間,至少要滿足Nsub=k+1,于是可得
矢量平滑算法可以很好保留陣元個數,因此只要最小陣元數滿足:N2 min=K+1。空間平滑算法陣元數要求如上文所述為

為求得最小陣元數要求,假設子陣數L=k+1;每個子陣陣元數p=k+1,于是最小陣元個數為:N3 min=2k+1。
從以上分析可見,對同等數量相干信號源估計所需的最少陣元數

因此相比與空間平滑算法與矢量平滑算法,本文算法的陣元孔徑利用率更高。
3.2 抗左右舷模糊能力
為便于分析,本文假設單目標情況。由子空間相關定理可得,空間平滑算法、矢量平滑算法與本文算法的信號子空間與對應的陣列流形的關系為
由于本文假設單目標情況,所以上述子空間為列矢量,其中asss、aV S、anew分別為空間平滑、矢量平滑與本文算法的系數矢量。由文獻[14-15]的相關理論可知
式中,UN SS、UN V S、UNnew為對應算法的噪聲子空間。以空間平滑算法為例,結合式(40)可得其任一角度MUSIC空間譜分母為
式中,Ω1(θi i)為第一子陣中聲壓陣信號子空間功率譜值,θi i為任一導向角度;θd為目標角度與導引角度值之差。同理可得矢量平滑算法與本文算法任一角度MUSIC算法的分母值為

Ω1(θi i),Ω2(θi i),Ω3(θi i)由于三角函數特性將造成左右舷模糊,而式(44)與式(46)中的方向因子(1+cos(θd))2與(1+2cos(θd))2可以有效調制空間功率譜,當導向角度在目標方位模糊角度處時,方向因子將產生抑制,最終造成MUSIC算法在該角度處的空間功率譜值減小,從而實現模糊方位的抑制,而矢量平滑算法由于沒有方向因子的調制,已經喪失了抗左右舷模糊能力。為進一步分析本文算法與空間平滑算法的抗空間模糊能力,采用文獻[16]的分析方法,定義左右舷模糊抑制增益為

式中,D′為歸一化方向因子在模糊角度與真實角度值之比。圖2給出目標角度為[0°,360°]兩種方向因子的抗左右舷模糊能力圖。
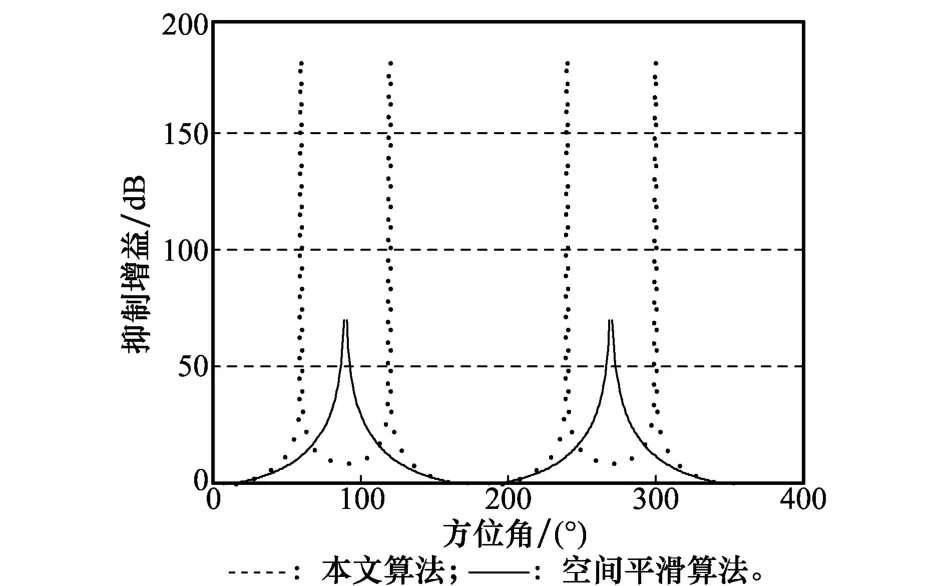
圖2 抗左右舷模糊能力示意圖
由圖2可見,空間平滑算法當目標處于90°,270°左右有較強的抗模糊角度能力,而本文算法會在60°,120°,240°,300°左右有較強抑制力。可見本文算法一定程度上保留了矢量陣的抗左右舷模糊能力,而且最強抑制角度數多于空間平滑算法。
由上文的理論分析可見,本文算法的陣元利用率較好,并且很好地保留了矢量陣的抗左右舷模糊能力,滿足了本文研究的目的要求。下節將給出相應的仿真結果來證明本文算法的有效性。
4 仿真實驗與比較
仿真1 此處仿真比較矢量陣空間平滑算法,矢量平滑算法與本文算法對雙相干信號目標DOA估計性能比較。仿真條件為4元矢量水聽器均勻線陣,采樣點數500,兩個窄帶相干信號,入射角度為60°與75°。圖3給出了信噪比0 dB時3種算法的空間功率譜圖。
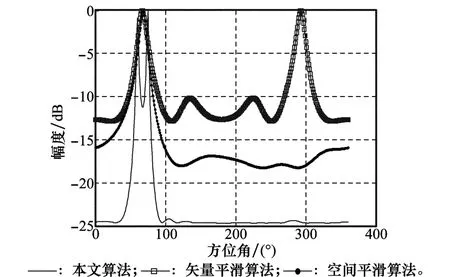
圖3 空間功率譜圖
圖4給出了3種算法100次蒙特卡羅試驗雙目標的平均均方根誤差圖。
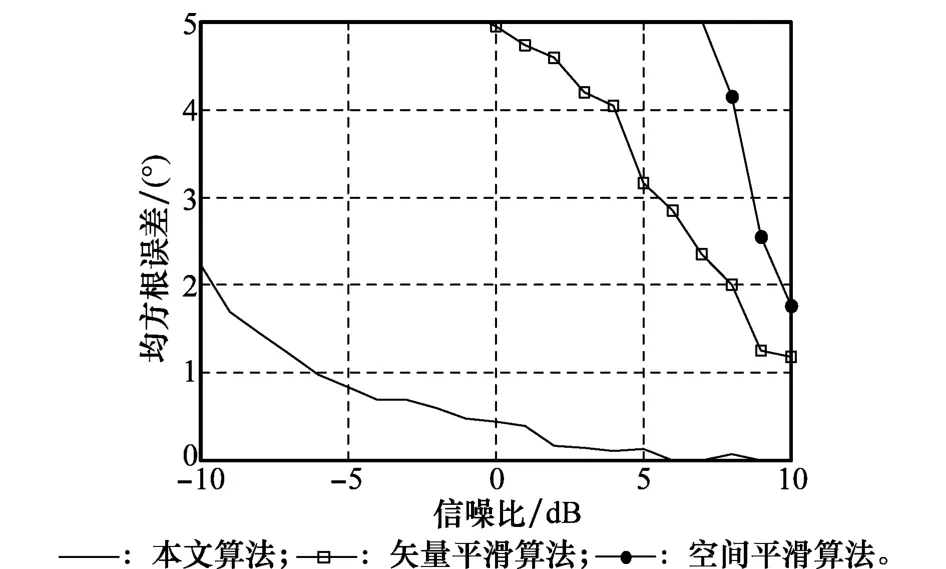
圖4 雙目標均方根誤差圖
為比較分辨率,圖5給出了3種算法的兩個相干目標識別概率。
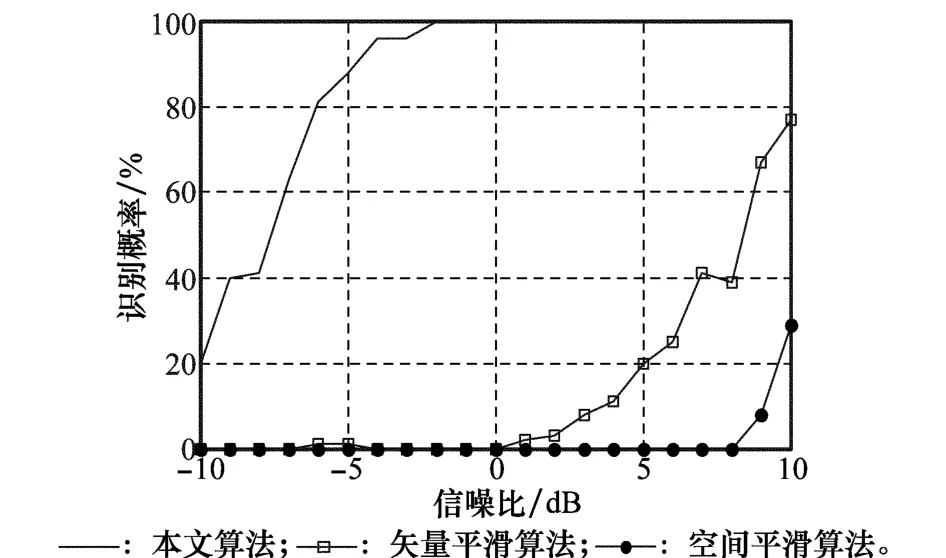
圖5 識別概率圖
仿真2 此處仿真比較3種算法對3個相干信號的角度識別能力,由于陣列的孔徑損耗,矢量陣空間平滑算法已經無法進行目標方位估計。入射角度為40°,75°,95°,其余仿真條件與仿真1一致。為進一步說明本文算法的優越性,本仿真中的矢量平滑算法采用文獻[9]中的改進矢量平滑算法。圖6給出了本文算法與矢量平滑算法在信噪比0 dB時的空間功率譜圖。
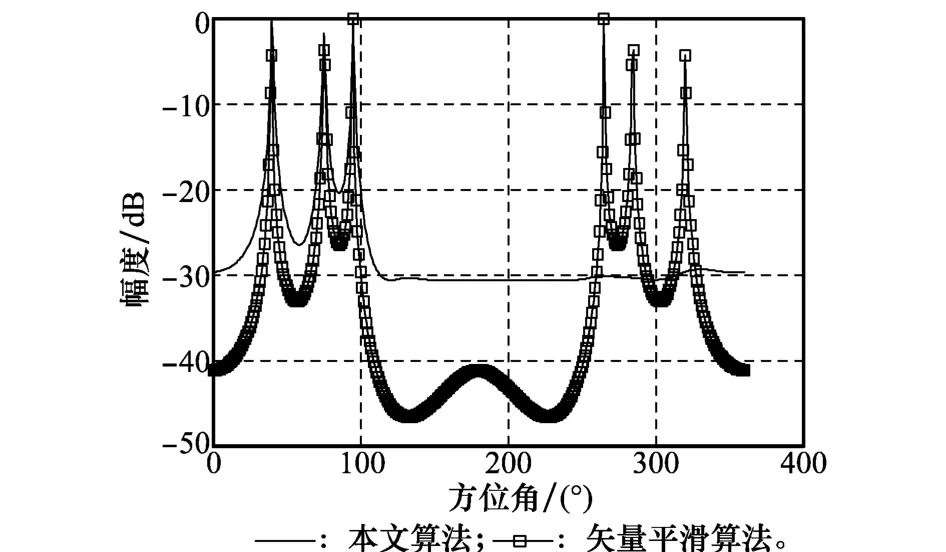
圖6 空間功率譜圖
圖7給出了本文算法與矢量平滑算法在40°,75°,95°處,100次蒙特卡羅試驗的平均均方根誤差圖。
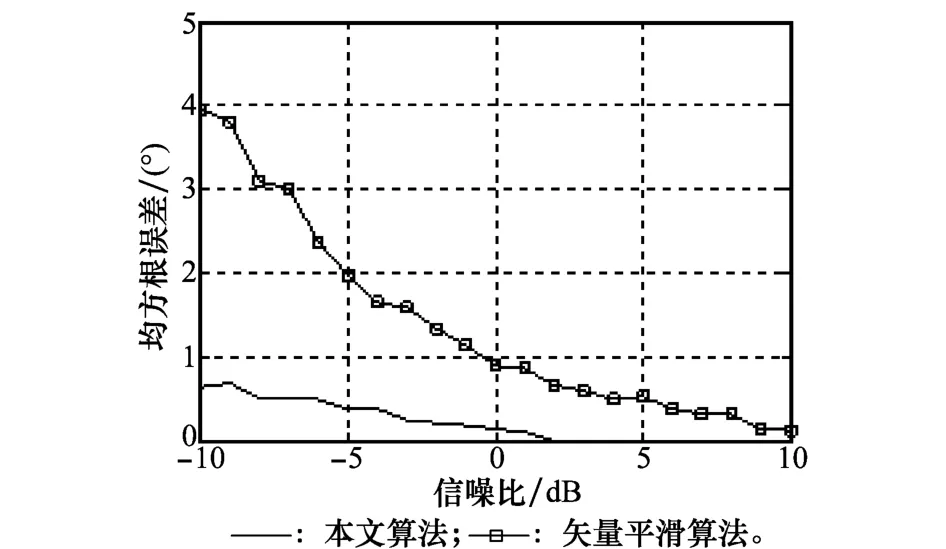
圖7 3目標均方根誤差圖
圖8給出了3個相干目標識別概率。
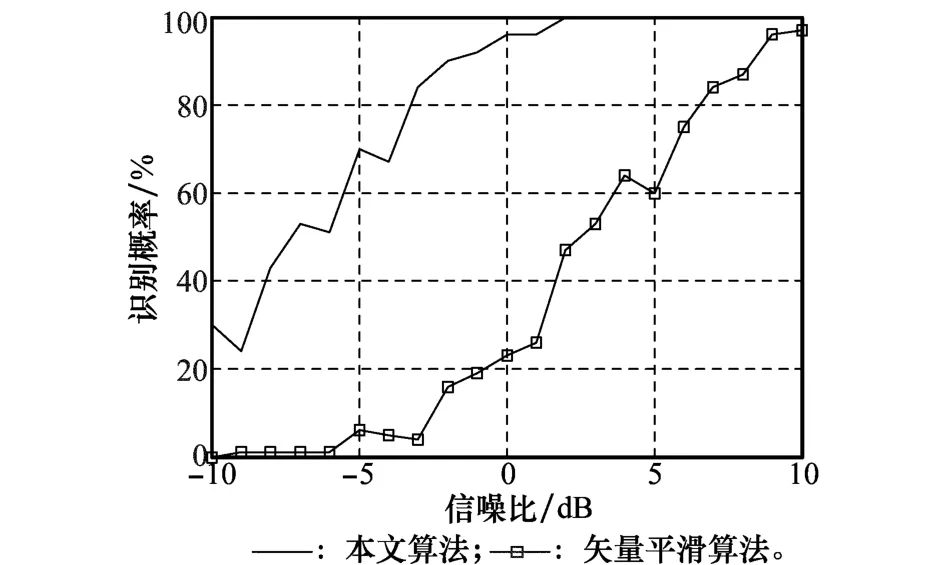
圖8 識別概率圖
從上文的仿真中可以看出,在雙相干目標情況下,由于陣列孔徑的損耗,空間平滑算法的分辨率與識別精度最低,而本文算法的陣列孔徑有所擴展,因此其分辨率與估計精度最高。對于3目標情況,由圖7與圖8可見,本文算法的估計精度與角度分辨率仍優于矢量平滑算法。而且,從圖3與圖6可見,本文算法與空間平滑算法保留了矢量陣的抗左右舷模糊能力,然而矢量平滑算法與聲壓陣一樣在模糊角度處有很強的空間功率。
5 結 論
本文針對二維緊湊結構的聲矢量均勻線陣相干信號DOA估計,給出一種改進算法,這種算法利用數據的組織形式使信號矩陣對角化,最終恢復了矩陣的秩,而且具有一定的孔徑擴展能力。同時,本文算法矢量陣陣列流形所具備的方向因子可以在模糊角度處形成抑制,保留了矢量陣的單邊指向性。最后通過仿真可以證明,本文的這種相干信號處理法在估計精度與角度分辨率方面都要優于常用的矢量陣空間平滑與矢量平滑算法。
[1]Xiong H Z,Prem ku mar A B.Partical filtering approaches for multiple acoustic source detection and 2-D direction of arrival estimation using a single acoustic vector sensor[J].IE E E Trans. on Signal Processing,2012,60(9):4719-4733.
[2]Palanisa m y P,Kalyanasundara m N,Swetha P M,et al.Twodimensional DOA estimation of coherent signals using acoustic vector sensor array[J].Signal Processing,2012,92(1):19-28.
[3]H e J,Liu Z.Two dimensional direction finding of acoustic sources by a vector sensor array using the propagator method[J].Signal Processing,2008,88(10):2492-2499.
[4]Wong K T,Zoltowski M D.Root-MUSIC-based azimuth-elevation angle-of-arrival estimation with uniformly spaced but arbitrarily oriented velocity hydrophone[J].IE E E Trans.on signal processing,1999,47(12):3250-3260.
[5]Nagananda K G,Anand G V.Subspace intersection method of high-resolution bearing estimation in shallow ocean using acoustic vector sensors[J].Signal Processing,2010,90(1):105-118.
[6]Nehorai A,Paldi E.Acoustic vector sensor array processing[J]. IE E E Trans.on Signal Processing,1994,42(9):2481-2491.
[7]Xin Y.Coherent source direction-finding using a sparsely-distributed acoustic vector-sensor array[J].IE E E Trans.on Aerospace and Electronic Systems,2012,48(3):2710-2715.
[8]He J,Liu Z.Efficient underwater two-dimensional coherent source local ization with l inear vector-hydrophone array[J].Signal Processing,2009,89(9):1715-1722.
[9]Tao J,Chang W,Cui W,et al.Vector f ield smoothing for DOA estimation of coherent underwater acoustic signals in presence of a reflecting boundary[J].IE E E Sensors Journal,2007,7(8):1152-1158.
[10]Tao J,Chang W,Shi Y,et al.Direction-finding of coherent sources via particle-velocity-field sm oothing[J].IE T Radar,Sonar and N avigation,2008,2(2):127-134.
[11]Y u F,Tao J W,Li J S,et al.Direction finding and subspace tracking of coherent acoustic signals with single snapshot sm oothing based on vector sensor array[J].Acta Electronic Sinica,2011,39(12):3733--3740.(虞飛,陶建武,李京書.相干聲波信號DOA單快拍矢量平滑估計與跟蹤算法[J].電子學報,2011,39(12):3733-3740.)
[12]Arpita T,M artin H,Giridhar K,et al.Single snapshot sm oothing with im proved effective array aperture[J].IE E E Signal Processing Letters,2009,16(6):505-508.
[13]G uo Y,Liu X L,Li N,et al.Covariance matrix reconstruction approach for DOA estimation of spatial signals[J].Journal of P L A University of Science and Technology(N atural Science E dition),2012,13(1):1-5(郭艷,劉學亮,李寧,等.基于協方差矩陣重構的DOA估計方法[J].解放軍理工大學學報(自然科學版),2012,13(1):1-5)
[14]Stoica P,Nehorai A.Performance co m parison of subspace rotation and MUSIC methods for direction estimation[J].IE E E Trans.on Signal Processing,1991,39(2):446-453
[15]Stoica P,Soderstrom T.Statical analysis of MUSIC and subspace rotation estimations of sinusoidal frequencies[J].IE E E Trans.on Signal Processing,1991,39(8):1836-1847.
[16]Yao Z X,Yu G S,He F Q,et al.Improved bartlett beam forming for vector sensor array[J].Acta Armamentar,2011,32(2):176-180.(姚直象,余貴水,賀富強.矢量陣改進常規波束形成[J].兵工學報,2011,32(2):176-180.)
Im proved coherent signal bearing estimation with acoustic vector hydrophone array
MA Bo-le,C H E N G Jin-fang
(Naval Engineering University,Department of Weapon,Wuhan 430033,China)
To improve the performance of bearing estimation for the coherent signal with acoustic vector hydrophone array,an algorith m based on two-dimensional co-collect acoustic vector hydrophone array is proposed. This algorithm firstly constructs a received data using analytical velocity and pressure array data to get covariance matrix,and abstracts three corresponding vectors of the first column of signal subspace to be conjugated and inverted.Then three new matrixes are obtained by using like-single snapshot construction of matrix and combined.At last,direction of arrival(DOA)estimation is realized by using S V D-MUSIC.The analysis denotes that the presented algorithm diagonalizes the signal matrix using type of data organization to recover rank and have aperture extension.Meanwhile,the direction factor of vector array manifold could make suppressing to the ambiguity angle so as to keep uni lateral directivity of vector array.Simulation proves that this algorith m has better performance than vector array spatial smoothing and vector smoothing,from accuracy and resolution.
coherent signal;spatial smoothing;vector smoothing;analytical velocity
A
10.3969/j.issn.1001-506 X.2016.03.07
1001-506 X(2016)03-0519-06
2014-12-17;
2015-06-08;網絡優先出版日期:2015-08-18。
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150818.1519.004.html
聲矢量陣低信噪比目標探測及高分辨方位估計(50909096)資助課題
馬伯樂(1984-),男,博士研究生,主要研究方向為軍用目標特性識別與信號處理。
E-mail:2915484072@qq.com
程錦房(1964-),男,教授,博士,主要研究方向為軍用目標特性識別與信號處理。
E-mail:1626275853@qq.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06