豎井掘進機控制系統設計
2016-09-20 02:29:31楊炳文付文俊劉志強
工礦自動化 2016年9期
楊炳文, 付文俊, 劉志強
(1.天地科技建井研究院, 北京 100013; 2.北京中煤礦山工程有限公司, 北京 100013)
?
豎井掘進機控制系統設計
楊炳文1,2,付文俊1,2,劉志強1,2
(1.天地科技建井研究院, 北京100013; 2.北京中煤礦山工程有限公司, 北京100013)
為保證豎井掘進機穩定、可靠運行,設計了一種基于PLC的豎井掘進機控制系統,介紹了系統組成、工作原理及軟硬件設計方案。該系統采用2組PLC,根據工作模式控制相關油泵、刀盤旋轉電動機及推進支撐油缸等,并將狀態參數上傳給本地操作平臺及遠程控制計算機進行顯示。實際應用表明,該系統運行狀況良好。
豎井掘進機; PLC控制; 刀盤旋轉驅動; 液壓推進及支撐
網絡出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160902.1007.002.html
0 引言
豎井掘進機是一種用于礦山豎井井筒建設的大型全斷面掘進綜合鑿井設備,具有破巖機械化、控制自動化、安全防護性好等特點。豎井掘進機一般工作在高溫、高壓、大濕度、高粉塵、高電磁干擾環境下,且伴隨有工作振動。為保證其可靠、穩定工作,需要高性能、高可靠性的電控系統。PLC具有通用性強、使用方便、可靠性高、抗干擾能力強、編程簡單等特點[1],因此本文設計并實現了一種基于PLC的豎井掘進機控制系統。
1 系統組成及原理
豎井掘進機控制系統主要由刀盤旋轉驅動部分、液壓推進及支撐部分、PLC控制部分、通信顯示部分、保護回路等組成。
豎井掘進機的刀盤由4臺電動機同步驅動。4臺電動機均由各自變頻器控制,由PLC控制變頻器,實現掘進機刀盤旋轉破巖。液壓推進及支撐部分通過推進油缸推動刀盤向下進行破巖工作,并通過支撐油缸將整個豎井掘進機撐緊在井壁上,以克服刀盤破巖旋轉產生的反轉矩,并承受推進油缸推動刀盤破巖時產生的反作用力。PLC控制部分以PLC為核心控制器件,接收本地控制平臺和遠程控制計算機的操作指令并進行響應。PLC通過比例換向閥控制油缸伸縮,并檢測行程和油壓,通過實時調整比例換向閥的開啟度來保證油壓穩定、支撐牢固[2];通過兩通換向閥控制主、副油泵給推進油缸或支撐油缸供壓;通過溢流閥及變量泵控制油路壓力。同時PLC接收各傳感器及儀表輸入的狀態參數(包括環境參數、液位、油壓、油溫、行程、電流、轉速等),根據參數進行相應的系統異常報警及保護[3],同時將狀態參數上傳給本地操作平臺及遠程控制計算機進行顯示。通信顯示部分實現系統各部分之間的通信,并實時顯示系統的工作狀態及參數。保護回路主要由傳感器、電流表等提供檢測信號,PLC根據檢測信號進行異常判斷,實現異常狀態下的報警及保護。
2 系統硬件設計
豎井掘進機控制系統硬件組成如圖1所示。
2.1PLC控制部分
采用2組PLC組成控制回路,一組為主PLC功能組,另一組為液壓PLC功能組。2組PLC之間通過Profibus-DP總線通信,傳遞指令、狀態參數等。主PLC功能組包括CPU模塊、模擬量輸入模塊、數字量輸入/輸出模塊及通信模塊。主PLC功能組通過Profibus-DP總線與遠程控制計算機及變頻器通信,通過數字量、模擬量輸入模塊獲得本地控制平臺的控制指令及操作參數,通過數字量輸出模塊驅動本地控制平臺的指示燈進行狀態顯示,通過通信模塊讀取各配電柜儀表參數[4]。

圖1 豎井掘進機控制系統硬件組成
液壓PLC功能組包括CPU模塊、模擬量輸入/輸出模塊、數字量輸入/輸出模塊,主要負責液壓推進及支撐部分的控制和檢測,通過Profibus-DP總線從主PLC功能組獲取控制參數,通過輸入模塊從各傳感器處獲取油壓、液位、油溫、行程等參數,通過輸出模塊控制液壓泵站電動機、電磁控制閥等,同時將相關參數傳回主PLC功能組。
2組PLC分別通過MPI總線與本地控制平臺的觸摸屏連接,接收操作指令并進行狀態顯示。
2.2刀盤旋轉驅動部分
豎井掘進機刀盤的4臺驅動電動機分別配有1臺變頻器,采用“一主三從”控制方式。選定其中1臺電動機作為主電動機,并配有編碼器。PLC與主電動機變頻器之間通過Profibus-DP總線通信,完成運行狀態參數采集與轉速設定功能,構成轉速閉環和轉矩閉環控制系統。主、從電動機變頻器之間通過變頻器的RDCO模塊連接。通過設置變頻器參數,將主電動機變頻器的轉矩信號引出,作為從電動機變頻器的控制信號,實現從電動機轉矩閉環控制,保證4臺電動機同步運轉。電動機轉速由主PLC功能組根據本地控制平臺或遠程控制計算機的轉速設置值控制,且電動機運行速度、電流、功率等信息由主PLC功能組采集。
鹽酸羥考酮注射液預處理在肺癌根治術中的應用效果及對機體免疫功能的影響……………………… 胡豐登 張婷 陳銀巧 等(1)66
2.3液壓推進及支撐部分
液壓推進及支撐部分主要包括4個推進油缸、8個支撐油缸,以及相應的電控閥門和行程檢測等設備,由液壓控制PLC功能組控制,完成整個豎井掘進機的推進及支撐操作。以下為液壓PLC功能組對液壓推進及支撐部分的具體控制功能。
(1) 開始工作,向冷卻泵、潤滑泵、濾油泵供電,根據油溫控制加熱器工作。
(2) 與主PLC功能組通信,獲取控制參數。通過各種采集設備采集狀態信息,同時向主PLC功能組發送液壓工況信息。
(3) 根據控制參數啟動主、副油泵,輸出0~10 V信號并通過電流放大板驅動變量泵,輸出4~20 mA信號控制比例換向閥,輸出0~10 V信號控制比例溢流閥,輸出開關量信號控制換向閥。
(4) 給主油泵供電,用于推進及支撐的快速動作。快速動作到位后,關閉主油泵,啟動副油泵實現微調及保壓功能。正常工作期間只使用副油泵完成推進及支撐動作。
(5) 在工作過程中發生憋鉆時,自動上提鉆頭重新開鉆。通過姿態檢測儀器檢測是否偏鉆,實現智能糾偏控制。
(6) 保護及報警。通過接收相應傳感器信號實現液位過低報警、過濾器換芯報警、行程檢測異常報警等。
2.4通信顯示部分
遠程控制計算機通過Profibus-DP總線與主PLC功能組通信,采用組態軟件WinCC編寫人機交互界面。
本地操作平臺配有2塊觸摸屏,分別與2個PLC功能組相連,用于顯示系統電流、工作狀態參數、環境參數、報警信息等。觸摸屏與PLC之間通過MPI協議通信,并使用組態軟件WinCC Flexible編寫人機交互界面。
主PLC功能組的通信模塊通過Modbus協議獲取各個配電柜的電流表參數等。
2.5保護回路
系統配有急停按鍵,用于緊急情況斷電。系統運行中,若出現過壓、過流、瓦斯超限等情況,立即停止電動機運轉,并顯示故障狀態。通過各種傳感器采集油壓、行程等參數,超過設定值時顯示報警。液位極低、過濾器需要換芯時顯示提示信息。各種電動機可進行聯鎖保護。
3 系統軟件設計
系統軟件包括主PLC功能模塊和液壓PLC功能模塊,程序流程分別如圖2、圖3所示。
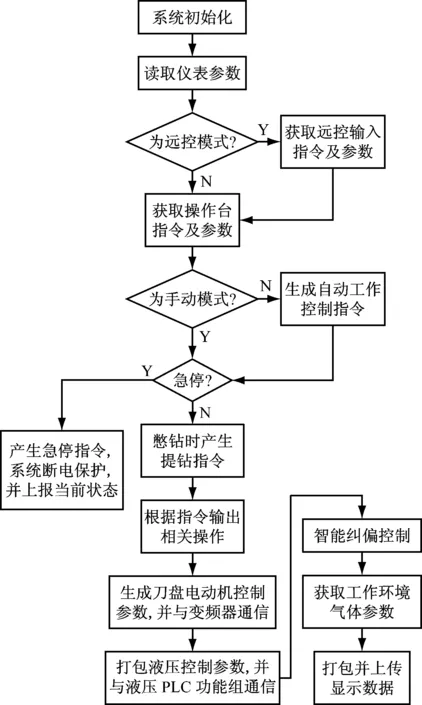
圖2 主PLC功能模塊程序流程

圖3 液壓PLC模塊程序流程
4 結語
基于PLC的豎井掘進機控制系統具有可靠性高、故障率低、維護簡單、操作自動化等優點,能有效完成掘進機的相關控制任務,并實時顯示整機運行狀態。該控制系統已應用于實際豎井掘進機系統,運行狀態良好。
[1]趙四海,胡于偉,趙哲謙,等.基于PLC的掘進機電控系統設計[J].工礦自動化,2013, 39(8):102-104.
[2]朱金雨,李國蓮.液壓支架跟機自動化系統設計[J].工礦自動化, 2013, 39(12):1-4.
[3]滕麗麗, 滕俊章.基于PLC的懸臂式掘進機電控系統的設計與實現[J].煤礦機械, 2014, 35(4):133-134.
[4]賈運紅.Modbus協議的實現方法[J].工礦自動化, 2015, 41(10):61-65.
Design of shaft boring machine control system
YANG Bingwen1,2,FU Wenjun1,2,LIU Zhiqiang1,2
(1.Institute of Mine Construction, Tiandi Science and Technology Co., Ltd., Beijing 100013, China;2.Beijing China Coal Mine Engineering Co., Ltd., Beijing 100013, China)
In order to ensure stable and reliable operation of shaft boring machine, an shaft boring machine control system based on PLC was designed, and composition, working principle and software and hardware design schemes were introduced. The system uses two PLC units to control corresponding oil pump, cutting bar rotating motor and pushing and supporting cylinder according to working mode, and uploads state parameters to local operation platform or remote controlling computer for display. The practical application shows that the system runs well.
shaft boring machine; PLC control; cutting bar rotating driving; hydraulic pushing and supporting
1671-251X(2016)09-0005-04
10.13272/j.issn.1671-251x.2016.09.002
2016-03-11;
2016-07-22;責任編輯:李明。
國家高技術研究發展計劃(863計劃)資助項目(2012AA06A403)。
楊炳文(1984-),男,山東煙臺人,碩士研究生,研究方向為煤礦建設技術裝備,E-mail:yangbingwenbbs@163.com。
TD631
A網絡出版時間:2016-09-02 10:07
楊炳文, 付文俊, 劉志強.豎井掘進機控制系統設計[J].工礦自動化,2016,42(9):5-8.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
電子制作(2017年7期)2017-06-05 09:36:13
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55