小型陸地鉆機(jī)新型鉆具排放機(jī)械臂設(shè)計(jì)方案
2016-09-22 07:15:56馬小石張成功
西部探礦工程 2016年3期
馬小石,張成功
(1.西南石油大學(xué),四川成都610500;2.中國(guó)石化勝利石油管理局勝利采油廠,山東東營(yíng)257051)
小型陸地鉆機(jī)新型鉆具排放機(jī)械臂設(shè)計(jì)方案
馬小石*1,張成功2
(1.西南石油大學(xué),四川成都610500;2.中國(guó)石化勝利石油管理局勝利采油廠,山東東營(yíng)257051)
鉆具排放機(jī)械臂是鉆機(jī)自動(dòng)化的關(guān)鍵技術(shù)設(shè)備,過(guò)去主要集中在海洋鉆機(jī)和大型陸地鉆機(jī)上進(jìn)行研究與應(yīng)用,而在陸地小型鉆機(jī)上所做的研究工作很少。在研究以往鉆具排放設(shè)備基礎(chǔ)上,采用現(xiàn)代機(jī)械設(shè)計(jì)理論和UG三維設(shè)計(jì)軟件設(shè)計(jì)了一種可用于陸地小型鉆機(jī)的鉆具排放機(jī)械臂,并應(yīng)用動(dòng)力學(xué)分析軟件ADAMS和有限元分析軟件ANSYS對(duì)其進(jìn)行了強(qiáng)度分析,保證機(jī)械臂的安全穩(wěn)定工作。機(jī)械臂主要由四連桿結(jié)構(gòu)的臂架、回轉(zhuǎn)機(jī)構(gòu)及末端的機(jī)械手組成,其結(jié)構(gòu)簡(jiǎn)單、體積小、重量輕,用鉆臺(tái)氣動(dòng)絞車(chē)即可吊起,安裝拆卸方便。機(jī)械臂配合鉆臺(tái)起吊設(shè)備,可以實(shí)現(xiàn)鉆臺(tái)立根的排放、接方鉆桿、完鉆甩單根等作業(yè),通過(guò)更換手爪,還可進(jìn)行下套管作業(yè)。
小型;自動(dòng)化;機(jī)械臂;UG;ADAMS;ANSYS
鉆臺(tái)管具的機(jī)械化處理是鉆機(jī)自動(dòng)化的重要組成部分[1],隨著鉆機(jī)自動(dòng)化的發(fā)展,近年來(lái)國(guó)內(nèi)也陸續(xù)出現(xiàn)了多種鉆臺(tái)管具的機(jī)械化處理設(shè)備,并推廣應(yīng)用取得了良好的效果。如四川宏華石油設(shè)備有限公司的PRM-100型排管裝置[2];李進(jìn)付等人設(shè)計(jì)的鉆臺(tái)自動(dòng)化機(jī)械手裝置[3];以及白丙建等人研制的TJG93/4-10二層臺(tái)自動(dòng)井架工[4]等。這些鉆具排放設(shè)備主要都是針對(duì)環(huán)境比較惡劣的海洋鉆井平臺(tái)或是鉆臺(tái)空間比較大的陸地鉆機(jī)而開(kāi)發(fā)的,而對(duì)于小型陸地鉆機(jī),以往的排放設(shè)備由于體積及結(jié)構(gòu)等原因并不適用。國(guó)內(nèi)小型陸地鉆機(jī)種類(lèi)多、數(shù)量大,如寶雞石油機(jī)械公司生產(chǎn)的ZJ30/1700和ZJ20/1350ZDB鉆機(jī),勝利油田在用的F-320鉆機(jī),以及在大慶-Ⅱ型鉆機(jī)等,都需要裝備鉆具排放機(jī)械臂來(lái)進(jìn)一步實(shí)現(xiàn)機(jī)械化自動(dòng)化。和國(guó)磊等人針對(duì)可抬頭式全液壓鉆機(jī)設(shè)計(jì)了一種BG型鉆桿排放機(jī)械手設(shè)備[5],能夠很好的配合全液壓車(chē)載鉆機(jī)進(jìn)行鉆桿排放作業(yè),為在小型鉆機(jī)上開(kāi)發(fā)鉆具排放機(jī)械臂提供了借鑒。為適應(yīng)小陸地式鉆機(jī)鉆具排放自動(dòng)化技術(shù)發(fā)展的需要,采用現(xiàn)代機(jī)械設(shè)計(jì)理論和UG三維設(shè)計(jì)軟件,以大慶-Ⅱ鉆機(jī)為研究對(duì)象,設(shè)計(jì)了一種新型的陸地鉆機(jī)鉆具排放機(jī)械臂機(jī)構(gòu)。
1 機(jī)械臂機(jī)構(gòu)設(shè)計(jì)
1.1整體結(jié)構(gòu)及鉆臺(tái)布局
機(jī)械臂整體結(jié)構(gòu)由底座、回轉(zhuǎn)支承、大臂、前伸臂、連桿、變幅液壓缸、末端機(jī)械手等機(jī)構(gòu)組成。底座采用4顆M24的螺栓與螺母固定在鉆臺(tái)面上,機(jī)械臂上方連接軸處裝有起吊環(huán),用于機(jī)械臂的吊裝。底座旁裝有液壓油泵,為整個(gè)裝置的液壓系統(tǒng)提供動(dòng)力。變幅液壓缸可以帶動(dòng)前伸臂向前伸出或向后縮回,回轉(zhuǎn)大齒輪在液壓馬達(dá)的帶動(dòng)下可以進(jìn)行360°的旋轉(zhuǎn)運(yùn)動(dòng),以實(shí)現(xiàn)不同方向的作業(yè)要求。末端機(jī)械手處的液壓缸可以控制機(jī)械手的開(kāi)合,從而實(shí)現(xiàn)對(duì)鉆具的夾持和松開(kāi)。圖1是機(jī)構(gòu)的運(yùn)動(dòng)簡(jiǎn)圖。
分析機(jī)械臂處的四連桿機(jī)構(gòu),由自由度公式F=3n-2pl-ph可知,此四連桿含有3個(gè)可自由運(yùn)動(dòng)的構(gòu)件前臂、后臂及上方的擺空連桿,并含有4個(gè)轉(zhuǎn)動(dòng)副,無(wú)高副,故此四連桿機(jī)構(gòu)的自由度為1,因此,只需添加一個(gè)原動(dòng)件就可使此四連桿機(jī)構(gòu)在平面內(nèi)有確定的運(yùn)動(dòng)[6-7]。
1.2工作流程
以起鉆時(shí)鉆桿從井口移送至排放架為例,來(lái)對(duì)機(jī)械臂的工作原理進(jìn)行說(shuō)明。起鉆時(shí),游車(chē)通過(guò)吊卡將一柱鉆桿提出井口,將卡瓦坐好并卸扣以后,機(jī)械臂向前伸至井口位置后,末端機(jī)械手夾持立柱。待末端機(jī)械手夾持立柱后,機(jī)械臂反方向縮回。此時(shí),液壓馬達(dá)帶動(dòng)回轉(zhuǎn)齒輪轉(zhuǎn)動(dòng)至排放架方向,機(jī)械臂再次伸出至排放架位置,末端機(jī)械手松開(kāi),立柱即可被放置于指定位置。至此,排放一根立柱的操作過(guò)程結(jié)束,機(jī)械臂再次伸至井口,重復(fù)以上動(dòng)作,即可完成起鉆時(shí)鉆桿的排放作業(yè)。依此類(lèi)推,同樣可以完成下鉆作業(yè)。
1.3主要技術(shù)參數(shù)
機(jī)械臂高度:2.6m;
底座面積:0.25m2;
適用的鉆具直徑范圍:60.3~177.8mm;
機(jī)械臂向前設(shè)計(jì)最大推力:4000N;
機(jī)械臂完全伸展后水平延伸距離:3m;
設(shè)計(jì)旋轉(zhuǎn)最大扭矩:4kN·m。
1.4機(jī)械臂主要特點(diǎn)
(1)此機(jī)械臂由于采用了鉸鏈四連桿結(jié)構(gòu)設(shè)計(jì),運(yùn)動(dòng)副都為轉(zhuǎn)動(dòng)副,承受壓力小,不易磨損。
(2)組成機(jī)構(gòu)多為桿,造型簡(jiǎn)單,易于后期加工獲得較高的精度。
(3)占據(jù)平臺(tái)空間小,不會(huì)妨礙其他作業(yè)。
(4)由于體積小,結(jié)構(gòu)簡(jiǎn)單,重量輕,使得它安裝拆卸比較方便,整個(gè)裝置只需4個(gè)地腳螺栓就可固定在鉆臺(tái)面上,方便井隊(duì)吊裝和搬運(yùn)。
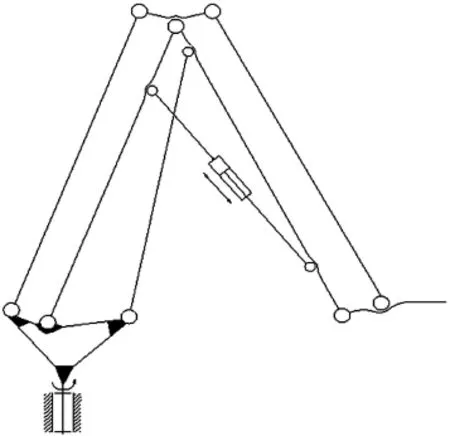
圖1 機(jī)械臂機(jī)構(gòu)運(yùn)動(dòng)圖
2 機(jī)械臂強(qiáng)度分析
鉆具排放機(jī)械臂在工作中除需要達(dá)到穩(wěn)定運(yùn)動(dòng),實(shí)現(xiàn)預(yù)定的動(dòng)作外,還需要保證裝置在工作中滿足強(qiáng)度要求。本小節(jié)將在前面對(duì)機(jī)械臂關(guān)鍵零部件強(qiáng)度分析的基礎(chǔ)上,通過(guò)ADAMS軟件計(jì)算各鉸鏈孔的受力情況,并運(yùn)用有限元分析軟件ANSYS,分析它們?cè)陟o力學(xué)狀態(tài)下的應(yīng)力狀況,以保證機(jī)械臂在工作過(guò)程中的安全穩(wěn)定性。
將機(jī)械臂模型導(dǎo)入ADAMS中建立的動(dòng)力分析模型及并進(jìn)行模型檢驗(yàn),為保證機(jī)械臂安全工作,以機(jī)械臂從最大工作行程3m處拉取7″鉆鋌立柱為例進(jìn)行分析。機(jī)械臂水平拉取鉆具3m,立柱長(zhǎng)按28.5m計(jì)算,7″鉆鋌米重為163kg/m,可知機(jī)械手處所需拉力為4890N,將此拉力加至機(jī)械手處,模擬時(shí)間為8s,由軟件計(jì)算處各零件處所受的支反力,根據(jù)支反力的大小可進(jìn)行模型的有限元強(qiáng)度校核。
2.1前臂強(qiáng)度分析
在adams軟件中將前臂受力情況輸出,可知前臂3個(gè)鉸鏈孔處的最大受力分別為16146N、4584N、18207N,將前臂模型導(dǎo)入ansys軟件中并施加約束載荷,即可得到前伸臂的應(yīng)力變化情況。
前臂材質(zhì)選取20#鋼,其屈服極限為245MPa,由ansys分析結(jié)果可知,前臂工作時(shí)的各部分應(yīng)力都較小,前臂上最大應(yīng)力為32.5MPa,遠(yuǎn)小于材質(zhì)的屈服極限,結(jié)構(gòu)強(qiáng)度有較大的余量,因此,后臂的結(jié)構(gòu)設(shè)計(jì)是安全的。
2.2后臂強(qiáng)度分析
在adams軟件中將后臂受力情況輸出,可知前臂3個(gè)鉸鏈孔處的最大受力分別為8136N、18349N、16146N,將后臂模型導(dǎo)入ansys軟件中并施加約束載荷,得到后臂的應(yīng)力變化情況如。
后臂材質(zhì)選取20#鋼,其屈服極限為245MPa,由ansys分析結(jié)果可知,后臂工作時(shí)的各部分應(yīng)力都較小,后臂上最大應(yīng)力為93.6MPa,遠(yuǎn)小于材質(zhì)的屈服極限,結(jié)構(gòu)強(qiáng)度有較大的余量,因此,后臂的結(jié)構(gòu)設(shè)計(jì)是安全的。
2.3機(jī)械手強(qiáng)度分析
由對(duì)末端機(jī)械手的受力分析可知,機(jī)械臂工作時(shí)作用在機(jī)械手指上的最大壓力為將鉆具拉至最遠(yuǎn)處3m時(shí)正向壓在手指末端時(shí)產(chǎn)生,大小為4350N,將此載荷施加于模型上得到機(jī)械手應(yīng)力變化情況。
機(jī)械手指材質(zhì)選取20#鋼,其屈服極限為245MPa,由圖19可知,機(jī)械手工作時(shí)的各部分應(yīng)力都較小,最大應(yīng)力出現(xiàn)在手指端部,為80MPa,遠(yuǎn)小于材質(zhì)的屈服極限,結(jié)構(gòu)強(qiáng)度有較大的余量,因此,機(jī)械手指結(jié)構(gòu)設(shè)計(jì)是安全的。
3 結(jié)論
(1)設(shè)計(jì)了適用于小型陸地鉆機(jī)的鉆具排放機(jī)械臂,配合起吊設(shè)備可以實(shí)現(xiàn)起下鉆時(shí)立根的排放,鉆進(jìn)時(shí)接單根,完鉆甩鉆桿等作業(yè)。
(2)機(jī)械臂結(jié)構(gòu)設(shè)計(jì)簡(jiǎn)單,體積小,機(jī)械臂工作時(shí)的最小回轉(zhuǎn)半徑只有300mm,質(zhì)量輕,整個(gè)裝置重量不到1噸,用鉆臺(tái)氣動(dòng)絞車(chē)即可吊起,安裝拆卸便捷。
(3)機(jī)械臂的強(qiáng)度分析結(jié)果表明,機(jī)械臂在工作時(shí),主要零部件的應(yīng)力變化都遠(yuǎn)小于材質(zhì)的屈服極限,安全可靠,可以滿足工作需求。
[1]M.D.Dunn,P.Archey,E.A.Opstad,etc,Design,Specification,and. Construction of a Light,Automated Drilling System(LADS)[R]. SPE 74451,2002
[2]朱吉良.鉆桿自動(dòng)傳送系統(tǒng)結(jié)構(gòu)設(shè)計(jì)與仿真分析[D].長(zhǎng)春:吉林大學(xué)碩士學(xué)位論文,2012.
[3]李進(jìn)付,安慶寶,董懷榮.鉆臺(tái)自動(dòng)化機(jī)械手裝置的研制[J].石油械,2010,38(11):80-81.
[4]白丙建,賈濤,高明.TJG93/4-10自動(dòng)井架工的研制[J].石油機(jī)械,2014,42(11):46-48.
[5]和國(guó)磊,許本沖,秦如雷.BG型鉆桿排放設(shè)備的設(shè)計(jì)與應(yīng)用[J].探礦工程,2014,41(4):42-45.
[6]李威,王小群.機(jī)械設(shè)計(jì)基礎(chǔ)[M].北京:機(jī)械工業(yè)出版社,2003.
[7]張曉玲.實(shí)用機(jī)構(gòu)設(shè)計(jì)與分析[M].北京:北京航空航天大學(xué)出版社,2010.
P634
A
1004-5716(2016)03-0064-03
2015-03-20
2015-03-20
馬小石(1983-),男(回族),山東東營(yíng)人,西南石油大學(xué)石油與天然氣工程學(xué)院在讀碩士研究生,研究方向:石油鉆井工程機(jī)械。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
