基于車輛之間實(shí)際距離的快速交通狀況檢測(cè)算法
2016-09-26 07:20:18宋俊芳王衛(wèi)星薛世焦宋煥生
計(jì)算機(jī)應(yīng)用與軟件 2016年3期
關(guān)鍵詞:檢測(cè)
宋俊芳 王衛(wèi)星 陳 艷 薛世焦 宋煥生,3
1(長(zhǎng)安大學(xué)信息工程學(xué)院 陜西 西安 710064)2(西藏民族學(xué)院信息工程學(xué)院 陜西 咸陽(yáng)712082)3(陜西省道路交通智能檢測(cè)與裝備工程技術(shù)研究中心 陜西 西安 710064)
?
基于車輛之間實(shí)際距離的快速交通狀況檢測(cè)算法
宋俊芳1,2王衛(wèi)星1陳艷1薛世焦1宋煥生1,3
1(長(zhǎng)安大學(xué)信息工程學(xué)院陜西 西安 710064)2(西藏民族學(xué)院信息工程學(xué)院陜西 咸陽(yáng)712082)3(陜西省道路交通智能檢測(cè)與裝備工程技術(shù)研究中心陜西 西安 710064)
交通狀況檢測(cè)與預(yù)警是交通信息檢測(cè)系統(tǒng)中一個(gè)很重要的組成部分,它對(duì)城市交通管控和誘導(dǎo)有著重要的指導(dǎo)意義。基于視頻圖像的灰度和邊緣特征,首先采用差分算法計(jì)算出各車道中軸線上像素點(diǎn)的灰度梯度,并對(duì)梯度函數(shù)結(jié)合“像素-距離”的映射關(guān)系,按距離聚類分析法完成其對(duì)應(yīng)曲線上脈沖的合并與數(shù)值量化;然后根據(jù)量化結(jié)果,對(duì)各車道的有車區(qū)域和無(wú)車區(qū)域做出標(biāo)識(shí),并對(duì)有車區(qū)域的分布密度做出統(tǒng)計(jì);最后,結(jié)合對(duì)車道中軸線上像素點(diǎn)的灰度幀差處理結(jié)果,對(duì)交通狀況做出精確判斷。經(jīng)實(shí)驗(yàn)驗(yàn)證,該算法能對(duì)道路的交通狀況做出準(zhǔn)確、實(shí)時(shí)的判斷,且算法簡(jiǎn)單穩(wěn)定,具有很好的實(shí)用價(jià)值。
交通狀況檢測(cè)灰度差分幀差像素-距離映射關(guān)系
0 引 言
早期的道路交通管理部門主要依靠人工方式觀察道路上交通流的交通狀況,由于當(dāng)時(shí)的路網(wǎng)規(guī)模較小、交通需求與供給的矛盾尚未激化,常發(fā)性交通擁擠狀況較少。因此,這種依據(jù)人工方法發(fā)現(xiàn)道路交通運(yùn)行效率的交通管理模式在很長(zhǎng)時(shí)間內(nèi)能夠維持道路交通的正常運(yùn)轉(zhuǎn)[1]。后來(lái),隨著道路上的車輛逐漸增多,車輛的擁堵和排隊(duì)已然成為一個(gè)常發(fā)性問(wèn)題,靠以前傳統(tǒng)的人工觀察方法已不能滿足交通管理對(duì)數(shù)據(jù)的要求。因此,如果能夠通過(guò)技術(shù)手段實(shí)時(shí)獲取道路上的動(dòng)態(tài)交通狀況,為交通誘導(dǎo)提供可靠的數(shù)據(jù)支持,則可以有效地緩解交通擁擠,提高道路使用效率,而對(duì)于這方面的技術(shù)研究,最早始于國(guó)外。如二十世紀(jì)80、90年代歐美國(guó)家和日本大力推行的智能交通系統(tǒng)就是:以電子設(shè)備為手段將采集到的交通流信息用于交通控制信號(hào)的配時(shí)和交通事件的自動(dòng)檢測(cè)。它把智能檢測(cè)技術(shù)集成到交通監(jiān)控系統(tǒng)中,以提高交通管理部門檢測(cè)、清理交通事故和疏導(dǎo)交通擁堵的能力[2]。最初,在此智能系統(tǒng)中針對(duì)交通狀態(tài)的判斷算法都是以發(fā)現(xiàn)道路上的突發(fā)交通事件為目的而設(shè)計(jì)的。如加利福尼亞算法[1,3,4],這種算法開發(fā)于1965年—1970年之間,最初用于洛杉磯公路管理控制中心。加州算法通過(guò)比較鄰近監(jiān)測(cè)站之間的交通參數(shù)數(shù)據(jù),主要是比較環(huán)行線圈檢測(cè)器獲得到的占有率數(shù)據(jù),對(duì)可能存在的突發(fā)交通事件進(jìn)行判別。再如1974年,Cook開發(fā)的一種雙指數(shù)平滑(DES)算法[1,4]。這種方法以交通參數(shù)數(shù)據(jù)的雙指數(shù)平滑值作為預(yù)測(cè)值,通過(guò)比較交通參數(shù)數(shù)據(jù)的預(yù)測(cè)值和實(shí)測(cè)值來(lái)構(gòu)造一個(gè)跟蹤信號(hào),當(dāng)該跟蹤信號(hào)超過(guò)預(yù)定的閾值時(shí),可觸發(fā)突發(fā)交通事件警報(bào)。而獨(dú)立的針對(duì)交通狀態(tài)自動(dòng)判別ACI(AutomaticCongestionIdentification)方法的研究真正始于1988年,Persaud[4]等人根據(jù)突變理論開發(fā)了McMaster算法,使用大量的擁擠和非擁擠交通狀態(tài)下的流量占有率歷史數(shù)據(jù),開發(fā)了一個(gè)流量占有率分布關(guān)系模板。通過(guò)將觀測(cè)數(shù)據(jù)之間的關(guān)系與模板進(jìn)行兩次比較,判斷是否發(fā)生了交通擁擠以及發(fā)生的是偶發(fā)性擁擠還是常發(fā)性擁擠。這種算法第一次將大交通需求引起的常發(fā)性擁擠作為了分析判斷的對(duì)象,并進(jìn)行了深入的研究。在此之后的一段時(shí)間,學(xué)者們針對(duì)這一問(wèn)題展開了大量研究,但大部分都是以感應(yīng)線圈采集的交通流量、道路占有率和車輛速度等交通數(shù)據(jù)為指標(biāo)對(duì)交通狀態(tài)進(jìn)行判別的。直到1993年,伴隨圖像處理和計(jì)算機(jī)視覺(jué)技術(shù)的成熟,Perrin等發(fā)現(xiàn)使用視頻圖像處理技術(shù)進(jìn)行交通狀態(tài)的判別比基于感應(yīng)線圈的判別算法有很多獨(dú)特的優(yōu)點(diǎn)[5]。感應(yīng)線圈只能采集某一地點(diǎn)的交通流數(shù)據(jù),且對(duì)安裝的要求比較高,施工量也大,維修成本也較高。而視頻圖像處理技術(shù)在傳統(tǒng)電視監(jiān)視系統(tǒng)的基礎(chǔ)上,將計(jì)算機(jī)視覺(jué)引入到交通信息檢測(cè)系統(tǒng)中,運(yùn)用圖像處理技術(shù)可以獲取所需的各種數(shù)據(jù)信息,且安裝簡(jiǎn)單、操作容易、維護(hù)也方便。之后,基于視頻分析的以交通流量、道路占有率和車輛速度等交通指標(biāo)為特征的交通狀況檢測(cè)算法頻頻出現(xiàn)。在國(guó)內(nèi),具有代表性的有:莊斌等人提出的城市道路路段上交通擁擠的平均占有率自動(dòng)檢測(cè)算法[6];李曉斌等人提出的基于RBF神經(jīng)網(wǎng)絡(luò)的高速公路交通狀況判別方法[7];肖永來(lái)提出的基于SCATS采集數(shù)據(jù)的城市道路交通狀態(tài)判別技術(shù)[8]等。他們都是以固定或者移動(dòng)檢測(cè)器所探測(cè)到的道路流量密度、道路占有率、車輛速度等作為交通狀況判斷的聯(lián)合依據(jù),根據(jù)實(shí)際的路網(wǎng)通行能力,設(shè)定流量、占有率和速度的極限值或者以他們?yōu)檩斎霐?shù)據(jù),預(yù)測(cè)出一個(gè)輸出值來(lái)劃分交通處于哪一個(gè)狀態(tài)。采用這類方法雖然在準(zhǔn)確度上有明顯的優(yōu)勢(shì),但實(shí)時(shí)性都較差。在提高實(shí)時(shí)性上,楊媛等人提出了一種以平均車輛速度為特征的交通狀況檢測(cè)方法[9],但是其準(zhǔn)確度還是依賴于對(duì)速度的預(yù)測(cè),算法不夠獨(dú)立,且先檢測(cè)速度,后判斷交通狀況,起不到對(duì)交通參數(shù)檢測(cè)和交通事件檢測(cè)的提前預(yù)測(cè)。本文以算法簡(jiǎn)單,功能實(shí)現(xiàn)獨(dú)立為目的,針對(duì)圖像中車輛的灰度和邊緣特征進(jìn)行深入分析,并結(jié)合“像素-距離”的映射關(guān)系,提出一種基于車輛之間實(shí)際距離的快速交通狀況檢測(cè)算法。該算法簡(jiǎn)單穩(wěn)定,可靠性強(qiáng),具有很好的應(yīng)用前景。
1 算法總流程
本文主要針對(duì)正常的道路場(chǎng)景進(jìn)行了大量的分析研究,進(jìn)而開發(fā)了一套適用于正常道路場(chǎng)景(非斑馬線,非減速帶)的交通狀況自動(dòng)檢測(cè)算法。
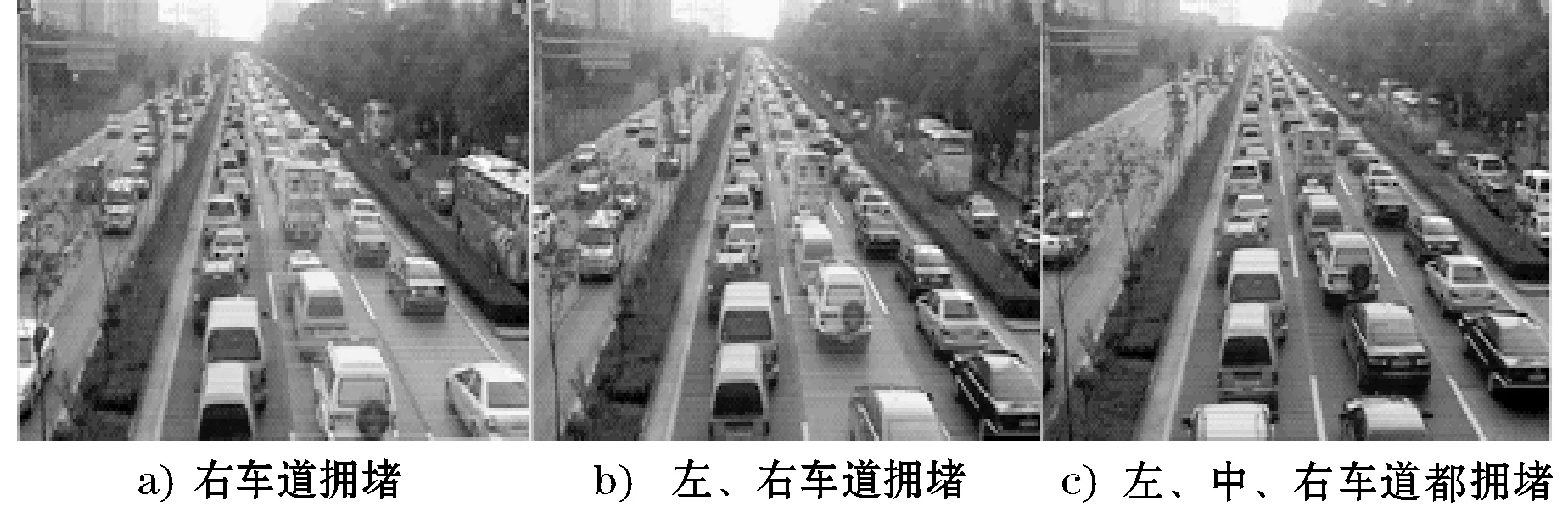
圖1為交通數(shù)據(jù)庫(kù)中某路段視頻序列中隨機(jī)的一幀圖像。從圖中看出,每個(gè)車道路面上的無(wú)車區(qū)域在灰度圖像中較為光滑,且近鄰區(qū)域的灰度較為接近(如圖片近端),而有車區(qū)域則有明顯的灰度跳變和邊緣存在(如圖片遠(yuǎn)端)。介于這樣的交通圖像特點(diǎn),本文提出分車道分析各車道中軸線上像素點(diǎn)在鄰域范圍和序列幀之間的灰度變化。并通過(guò)對(duì)這種變化的量化表示,結(jié)合“像素-距離”的映射關(guān)系描述出各車道車輛的分布情況。最后將車輛分布情況按其預(yù)示的不同交通狀況進(jìn)行聚類,并對(duì)擁堵狀態(tài)做出預(yù)警顯示。

圖1 正常道路場(chǎng)景
其算法的流程如圖2所示,算法的核心主要集中在“像素-距離”映射關(guān)系的建立以及車輛的存在性檢測(cè)和有車區(qū)域的運(yùn)動(dòng)判斷。
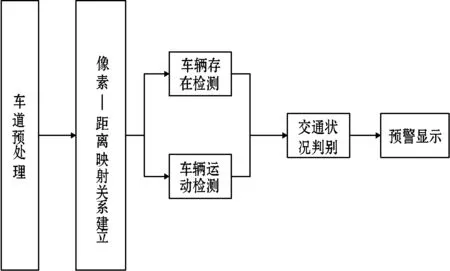
圖2 交通狀況檢測(cè)算法流程
2 車道預(yù)處理與映射關(guān)系建立
2.1車道劃分與距離標(biāo)注
車輛在正常情況下(無(wú)變道、逆行發(fā)生),都是以車道隔離線為邊界,沿車道按秩序順序行駛的。本文結(jié)合這一實(shí)際情況,提出了分車道對(duì)交通狀況進(jìn)行判斷的思路。在現(xiàn)實(shí)交通場(chǎng)景里,那些顯著的白色等間隔短線就是交管部門為了對(duì)車輛的運(yùn)行軌道進(jìn)行隔離而設(shè)立的。在這部分車道劃分就是在視頻圖像上,如何通過(guò)在白色短線上取點(diǎn),進(jìn)而擬合出能代表實(shí)際車道隔離線的直線,作為圖像中車道的分界線。本文以車輛離開方向的道路場(chǎng)景為例,用最小二乘法對(duì)選取點(diǎn)擬合的結(jié)果如圖3所示,道路場(chǎng)景的右邊按車道被分成了兩個(gè)檢測(cè)區(qū)域,分別標(biāo)記為1車道和2車道。
為進(jìn)一步計(jì)算圖像中“像素-距離”的映射關(guān)系,首先需要對(duì)車道進(jìn)行簡(jiǎn)單的距離標(biāo)注,其標(biāo)注方法如圖4所示。分別選取車道隔離線上對(duì)應(yīng)的等距離映射點(diǎn),其中點(diǎn)N,點(diǎn)M和點(diǎn)F代表車道中間線上的三個(gè)代表性的映射點(diǎn)。以這三個(gè)點(diǎn)為基準(zhǔn)將整個(gè)道路分成了四段,并用箭頭指示出每段映射關(guān)系求取時(shí)的方向,然后由攝像機(jī)架設(shè)位置和角度以及幾何透視原理[9]便可推導(dǎo)出各段內(nèi)任意點(diǎn)所對(duì)應(yīng)的實(shí)際路面距離。假設(shè)中間兩段的像素距離用n和m表示,在選點(diǎn)時(shí),要保證n和m所代表的實(shí)際路面距離要相等。

圖3 車道劃分

圖4 距離標(biāo)注
2.2映射關(guān)系建立
在以往的交通狀況判斷算法中,僅局限在二維圖像中所反映出的特征信息,對(duì)于還原真實(shí)三維空間中的交通場(chǎng)景并未考慮。其實(shí),在判斷交通狀況時(shí),如果能夠從車輛之間的實(shí)際距離出發(fā),這將是最直觀、最簡(jiǎn)單的判據(jù)。要想得到車輛位置之間的實(shí)際距離,首先要求出圖像中像素點(diǎn)對(duì)應(yīng)的路面實(shí)際距離。我們把求取圖像中每個(gè)像素點(diǎn)所代表的路面實(shí)際距離的過(guò)程稱之為“像素-距離”映射。在映射關(guān)系建立過(guò)程中,針對(duì)我們的研究對(duì)象(車道中軸線),在這里只需考慮縱向?qū)嶋H距離,對(duì)橫向距離可以忽略不計(jì)。因此在推導(dǎo)實(shí)際距離時(shí),可以假設(shè)路面實(shí)際距離只隨像素行的遞增而變化,即認(rèn)為同一像素行上的所有像素點(diǎn)其對(duì)應(yīng)的路面實(shí)際距離是相等的,這樣用一個(gè)一維數(shù)組MappedDis[y]就可以表示圖像上每個(gè)像素點(diǎn)對(duì)應(yīng)的實(shí)際距離。具體幾何推導(dǎo)過(guò)程如示意圖5所示,O點(diǎn)相當(dāng)于攝像機(jī)的焦點(diǎn),DC代表的是中間車道線,EF為攝像機(jī)鏡頭,也就是視頻圖像上所顯示的平面。

圖5 透視關(guān)系幾何推導(dǎo)示意圖
其中N、M、F所對(duì)應(yīng)的實(shí)際道路路面點(diǎn)為A、B、C,且AB=BC。在視頻上找一個(gè)點(diǎn)E(圖中所示為第一種情況,E點(diǎn)位于N點(diǎn)左側(cè)的分段),E點(diǎn)所對(duì)應(yīng)的路面上的點(diǎn)為D,所以,關(guān)鍵問(wèn)題就是要找出視頻圖像中像素距離EN所對(duì)應(yīng)的實(shí)際距離DA。首先做兩條輔助線,DH和AG,平行于EF。
則已知條件分別為:
AB=BC,并且AB和BC都已知;
NM和MF的像素距離已知;
EN的像素距離已知;
EF//DH//AG(//表示平行,Δ表示三角形)。
求:DA的實(shí)際距離用已知參數(shù)表示。
求解方法如下:
將DP、QH、AK代入下面兩式:



(1)
同理,求出其他幾種情況的結(jié)果:
第二種情況,E點(diǎn)在NM之間:
(2)
第三種情況,E點(diǎn)在MF之間:
(3)
第四種情況,E點(diǎn)在F點(diǎn)右邊:
(4)
以上關(guān)系式由攝像機(jī)位置和角度根據(jù)光學(xué)原理推導(dǎo)而來(lái),具有準(zhǔn)確性和科學(xué)性。根據(jù)這四個(gè)關(guān)系式,可以計(jì)算出圖4中1、2、3、4段內(nèi)所有像素點(diǎn)對(duì)應(yīng)的實(shí)際距離。在計(jì)算過(guò)程中,可以將上述關(guān)系式簡(jiǎn)化為如下公式:
(5)
(6)
(7)
(8)
其中t1、t2、t3和t4分別表示1、2、3、4段內(nèi)像素點(diǎn)對(duì)應(yīng)的實(shí)際距離,a為m、n所代表的實(shí)際空間距離,一般是6米。l表示各段內(nèi)某像素點(diǎn)到其基準(zhǔn)像素點(diǎn)的絕對(duì)像素距離。圖像中其余部分的實(shí)際距離可以循環(huán)利用上述公式得到。最后將所有像素行[0,287]的實(shí)際距離存儲(chǔ)到數(shù)組MappedDis[y]中,我們把這個(gè)一維數(shù)組稱作像素到距離的映射表,通過(guò)查找表,可以求出任意兩行上像素點(diǎn)之間的實(shí)際距離。如表中MappedDis[268]=9116cm,MappedDis[120]=1800cm,則可以得出圖像中第120行上任意像素點(diǎn)到268行上任意像素點(diǎn)之間的實(shí)際距離為:MappedDis[268]-MappedDis[120]= 7316cm。
為了驗(yàn)證此映射關(guān)系的準(zhǔn)確性,將表中對(duì)應(yīng)的數(shù)據(jù)變化關(guān)系用函數(shù)曲線描述如圖6所示,隨著像素行的增大,其實(shí)際距離呈拋物線遞增趨勢(shì)。在映射過(guò)程中,為了方便計(jì)算,將所有的距離都轉(zhuǎn)化為以圖片底端為基準(zhǔn)點(diǎn)的實(shí)際距離。因此從圖中可以看到,圖片最底端像素對(duì)應(yīng)的實(shí)際距離為0,且在圖片近端,實(shí)際距離變化趨勢(shì)較緩,而在圖片遠(yuǎn)端像素點(diǎn)所代表的實(shí)際距離迅速增加,這正好符合幾何透視原理。在攝像機(jī)視野近處,圖像中目標(biāo)較大,像素點(diǎn)之間的實(shí)際距離較小,但在遠(yuǎn)處,雖然目標(biāo)很小,像素點(diǎn)之間的實(shí)際距離卻很大。
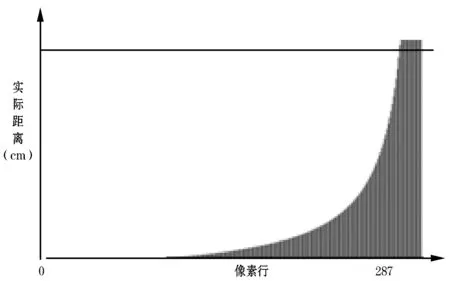
圖6 像素-距離映射關(guān)系變化曲線
通過(guò)上述車道劃分和映射關(guān)系的建立,我們不僅將圖片按照實(shí)際車道分成了幾個(gè)相似的檢測(cè)區(qū)域,同時(shí)建立了一個(gè)像素到距離的映射關(guān)系表,為交通狀況的判斷奠定了基礎(chǔ)。
3 交通狀況檢測(cè)與預(yù)警顯示
為了很好地描述道路的擁擠情況,將交通狀況從總體上劃分為三級(jí):暢通、飽和和擁堵。它們之間是相互關(guān)聯(lián)的,且狀態(tài)之間當(dāng)達(dá)到一定條件時(shí),會(huì)相互轉(zhuǎn)換,基本上都符合從暢通到飽和再到擁堵或者從擁堵到飽和再到暢通這樣的規(guī)律。
交通狀況檢測(cè)可分為兩步,車輛存在檢測(cè)和車輛運(yùn)動(dòng)檢測(cè)。近些年有很多學(xué)者對(duì)車輛存在檢測(cè)和運(yùn)動(dòng)檢測(cè)進(jìn)行了研究[10-13]。也有部分學(xué)者將這兩者結(jié)合起來(lái)實(shí)現(xiàn)車輛排隊(duì)長(zhǎng)度的檢測(cè)[14,15]。本文也是基于這樣的思路,結(jié)合車輛存在檢測(cè)和運(yùn)動(dòng)檢測(cè)對(duì)道路交通狀況進(jìn)行實(shí)時(shí)判斷與預(yù)警,但在車輛存在檢測(cè)和運(yùn)動(dòng)檢測(cè)方面,算法比以往簡(jiǎn)單、新穎,且效果直觀,有利于交通狀況更加形象準(zhǔn)確地判斷。
3.1車輛存在檢測(cè)
按照交通規(guī)則,車輛在道路上正常行駛是不允許跨越車道隔離線和隔離帶的。因此大部分車輛都是壓著車道中軸線行駛的,介于這樣的考慮,本文提出通過(guò)計(jì)算車道中軸線上灰度的變化來(lái)進(jìn)行車輛存在檢測(cè)并確認(rèn)運(yùn)動(dòng)區(qū)域。車輛存在檢測(cè)分為關(guān)鍵兩步:(1) 求取灰度差分函數(shù);(2) 聚類分析與量化處理。
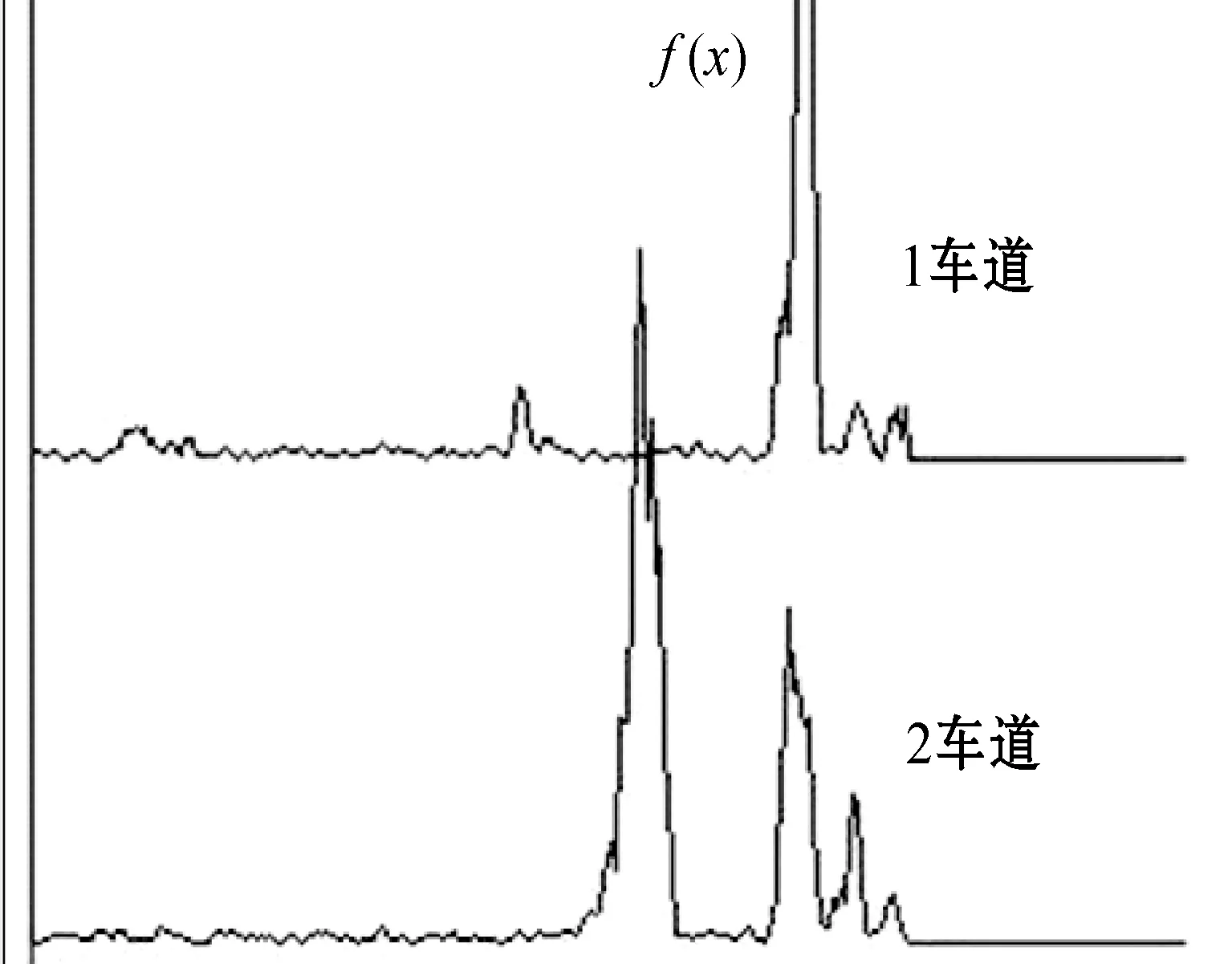
首先假設(shè)車道中軸線上像素點(diǎn)的行坐標(biāo)x與車道序列y組成一個(gè)表示灰度信息的二維函數(shù)f(x,y),則f(x,1)、f(x,2)分別為1車道和2車道中軸線上像素位置x所對(duì)應(yīng)的灰度,其函數(shù)關(guān)系如圖7所示。從圖中看出,灰度曲線在有車輛的位置處,存在明顯的脈沖序列,這些序列的形成始于目標(biāo)邊緣的突變,如果從圖中可以明顯地分辨出突變位置,則就可以準(zhǔn)確地定位出車輛的頭部和尾部像素位置。
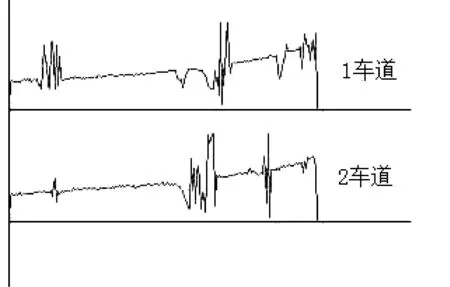
圖7 車道中軸線上灰度分布曲線圖
接下來(lái)為了放大函數(shù)的這種突變,進(jìn)而方便檢測(cè)車頭和車尾,引入梯度運(yùn)算分別對(duì)f(x,1)、f(x,2)這兩個(gè)函數(shù)進(jìn)行求導(dǎo),具體公式如式(9)所示。通過(guò)計(jì)算相鄰像素點(diǎn)之間的灰度差來(lái)反應(yīng)梯度變化。
(9)
為了減小函數(shù)的噪聲干擾,在計(jì)算中,如果只考慮車道中軸線上一個(gè)像素點(diǎn)的灰度值是不夠的,所以,對(duì)每個(gè)像素點(diǎn)我們都以車道中軸線為中心,像兩邊延生出一定范圍并求取其均值作為該像素點(diǎn)對(duì)應(yīng)的灰度值進(jìn)行差分運(yùn)算。對(duì)差分結(jié)果我們進(jìn)一步通過(guò)平滑去噪得到其對(duì)應(yīng)的函數(shù)關(guān)系,如圖8所示。
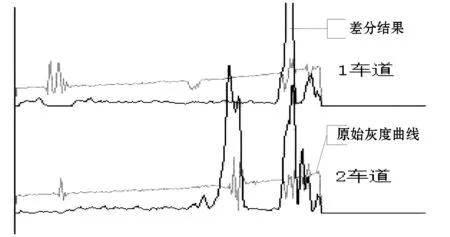
圖8 車道中軸線上灰度差分曲線圖
從圖8中對(duì)比發(fā)現(xiàn),經(jīng)過(guò)對(duì)車道中軸線上像素點(diǎn)的梯度運(yùn)算,不僅消除了無(wú)車路段的噪聲脈沖,還使有車路段的脈沖邊緣更加顯著,依據(jù)這樣的函數(shù)曲線所描述的信息,可以對(duì)有車區(qū)域和無(wú)車區(qū)域做出初步判斷。為進(jìn)一步根據(jù)車輛區(qū)域的分布密度判斷當(dāng)前的交通狀況,本文將差分結(jié)果中相鄰的脈沖按像素距離和路面實(shí)際距離進(jìn)行聚類分析并量化。其操作流程如圖9所示。

圖9 差分函數(shù)合并、量化流程圖
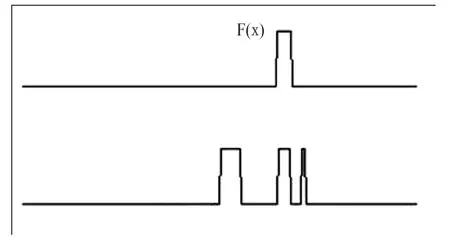
首先通過(guò)相鄰脈沖的像素位置查表求出其對(duì)應(yīng)的實(shí)際路面距離。設(shè)上一個(gè)脈沖結(jié)束的位置坐標(biāo)為x1,第二個(gè)脈沖起始的位置坐標(biāo)為x2,第一個(gè)脈沖結(jié)束位置對(duì)應(yīng)的路面實(shí)際距離為s1,第二個(gè)脈沖起始位置對(duì)應(yīng)的路面實(shí)際距離為s2,則對(duì)于滿足條件:x2-x1 圖10 差分函數(shù)合并量化結(jié) 3.2運(yùn)動(dòng)檢測(cè) 運(yùn)動(dòng)檢測(cè)是用來(lái)區(qū)分車輛飽和和擁堵狀態(tài)的,將各車道中軸線對(duì)應(yīng)像素點(diǎn)的灰度值與相鄰幀相減,得到幀差結(jié)果f(x), 并通過(guò)分析f(x)函數(shù)曲線,如圖11所示,判斷出運(yùn)動(dòng)車輛區(qū)域。其計(jì)算公式如下: f(x)=|f1(x)-f2(x)| (10) 圖11 車道中軸線上灰度幀差曲線圖 其中,f1(x)為當(dāng)前幀x點(diǎn)對(duì)應(yīng)的灰度值,f2(x)為前一幀x點(diǎn)對(duì)應(yīng)的灰度值。同樣,對(duì)幀差函數(shù)f(x)按3.1節(jié)聚類分析方法進(jìn)行平滑,合并及二值量化處理,得到如圖12所示的方波脈沖函數(shù)F(x)。 圖12 幀差函數(shù)合并量化結(jié)果 從圖中看出,方波脈沖函數(shù)將車道上存在運(yùn)動(dòng)的區(qū)域清晰地分割了出來(lái)。如:1車道合并之后的車輛區(qū)域在圖12中運(yùn)動(dòng)分布所占比例接近一半,2車道合并之后的左側(cè)區(qū)域在圖12中運(yùn)動(dòng)分布比例達(dá)到100%,而右側(cè)區(qū)域在圖12中出現(xiàn)兩個(gè)方波,中間存在一段無(wú)運(yùn)動(dòng)的區(qū)域,這些數(shù)據(jù)信息,是飽和、擁堵狀況區(qū)分的關(guān)鍵。 3.3交通狀況判斷 結(jié)合灰度差分和幀差方波圖10、圖12,對(duì)道路交通狀況進(jìn)行判斷,其流程如圖13所示。設(shè)差分函數(shù)方波第j個(gè)脈沖的起始位置坐標(biāo)為x1j,結(jié)束位置坐標(biāo)為x2j,起始位置對(duì)應(yīng)的路面實(shí)際距離為s1j,結(jié)束位置對(duì)應(yīng)的路面實(shí)際距離為s2j。首先依次對(duì)差分函數(shù)波形中的脈沖判斷其始末像素位置距離和路面實(shí)際距離,對(duì)于像素距離x2j-x1j>a且路面實(shí)際距離s2j-s1j>b的脈沖,我們將之統(tǒng)計(jì)記錄在狀態(tài)持續(xù)長(zhǎng)度計(jì)數(shù)器Cal[y]中,作為交通狀況進(jìn)一步區(qū)分判斷的首要條件,其中a、b為常量。接下來(lái)判斷Cal[y]的值,當(dāng)它為0時(shí),說(shuō)明車道暢通,沒(méi)有出現(xiàn)車輛密集區(qū)域;當(dāng)它大于閾值c時(shí),說(shuō)明路段出現(xiàn)擁擠,在這種情況下,將前面統(tǒng)計(jì)記錄好的差分函數(shù)方波脈沖與和其位置相對(duì)應(yīng)的幀差方波脈沖做“與”運(yùn)算;當(dāng)車輛存在區(qū)域發(fā)生運(yùn)動(dòng)的比例達(dá)到d%時(shí),我們認(rèn)為車道車輛達(dá)到了飽和,否則,當(dāng)運(yùn)動(dòng)比例很小時(shí),認(rèn)為車輛已處于擁堵排隊(duì)狀態(tài)。按照此流程分車道對(duì)交通狀況做出判斷,并給出相應(yīng)的預(yù)警提示信息。 圖13 交通狀況判斷流程圖 4.1實(shí)驗(yàn)結(jié)果 為測(cè)試本文所采用的交通狀況檢測(cè)算法的性能,以西安市南二環(huán)路口所拍攝的視頻圖像為例進(jìn)行測(cè)試實(shí)驗(yàn)。由攝像頭采集的數(shù)據(jù)為每秒25幀的視頻流,即播放一幀的時(shí)間為40ms,根據(jù)路口交通控制的實(shí)時(shí)性要求,為了較少運(yùn)算量,我們將原始圖像轉(zhuǎn)換為分辨率為720 × 288 的灰度圖像進(jìn)行處理分析。經(jīng)試驗(yàn)驗(yàn)證,本文所論述的車輛交通狀況自動(dòng)檢測(cè)算法是有效可行的,它能夠?qū)崟r(shí)地檢測(cè)出道路交通狀況的變化,并做出準(zhǔn)確判斷,并且它將車輛之間的實(shí)際距離作為判據(jù),效果更為直接,具有很好的應(yīng)用前景。圖14、圖15分別為道路上出現(xiàn)飽和、擁堵排隊(duì)時(shí)的預(yù)警示意圖,圖中顯示了某一時(shí)段內(nèi)三車道道路交通的實(shí)際檢測(cè)結(jié)果,矩形框區(qū)域表示了飽和、擁堵排隊(duì)狀態(tài)出現(xiàn)時(shí)瞬時(shí)所延伸的最大距離,這種方法與人為觀察的實(shí)際情況相比,得到了理想的效果。 圖14 道路飽和預(yù)警 圖15 道路擁堵排隊(duì)預(yù)警 4.2實(shí)驗(yàn)分析 為了進(jìn)一步定量分析本文提出算法的優(yōu)點(diǎn),從預(yù)警準(zhǔn)確率、誤警率、漏警率這三個(gè)指標(biāo)出發(fā),對(duì)其性能評(píng)價(jià)如表1所示。表中顯示了針對(duì)西安市南二環(huán)路視頻數(shù)據(jù)9293幀中,三個(gè)車道Lane1、Lane2、Lane3分別得到的預(yù)警結(jié)果,以及最后的平均結(jié)果。 表1 道路交通狀況預(yù)警結(jié)果 另外,針對(duì)西安市南二環(huán)路視頻數(shù)據(jù),用文獻(xiàn)[9]提出的算法也進(jìn)行了驗(yàn)證。用4GB內(nèi)存的計(jì)算機(jī),在VC++6.0語(yǔ)言環(huán)境下運(yùn)行,得到文獻(xiàn)[9]和本文算法的對(duì)比結(jié)果,如圖16所示。在圖中,從算法耗時(shí)、預(yù)警準(zhǔn)確率、誤警率和漏警率四個(gè)方面可以明顯的看出,本文提出的方法不僅有較高的準(zhǔn)確度,且實(shí)時(shí)性較好,整個(gè)算法耗時(shí)只有0.0046s,對(duì)智能交通檢測(cè)系統(tǒng)來(lái)說(shuō),所占時(shí)間甚少,但是卻為交通參數(shù)檢測(cè)和交通事件檢測(cè)奠定了重要基礎(chǔ)。 圖16 算法比較結(jié)果 針對(duì)道路交通狀況,本文提出了一種基于車輛之間實(shí)際距離的檢測(cè)算法。運(yùn)用灰度差分和幀差檢測(cè)出車輛的存在位置和運(yùn)動(dòng)狀態(tài),并通過(guò)距離聚類分析對(duì)交通狀況作出判斷。這種方法經(jīng)測(cè)試,在西安市南二環(huán)路口視頻數(shù)據(jù)中,能準(zhǔn)確實(shí)時(shí)地判斷出當(dāng)前道路的交通狀況,并可以對(duì)異常交通狀況進(jìn)行預(yù)警顯示。與其他方法相比,它具有可靠性高、算法簡(jiǎn)單、實(shí)用性強(qiáng)等優(yōu)點(diǎn),因此,該方法可以作為交通管理部門全面實(shí)時(shí)了解道路交通狀況的一個(gè)重要手段。 [1] 於毅.城市道路交通狀態(tài)判別方法研究[D].北京:北京交通大學(xué),2006. [2]TateWL,EllramLM,CarterCR.Theimpactofsupplymanagementonenvironmentalperformanceoutcomes[C]//InternationalSocietyforOpticsandPhotonics,2004: 94-105. [3] 佘永業(yè).基于光流速度與狀態(tài)模型分析的高速公路交通狀態(tài)檢測(cè)算法研究[D].廣州: 中山大學(xué),2010. [4] 姜桂艷.道路交通狀態(tài)判別技術(shù)與應(yīng)用[M].北京.人民交通出版社,2004:32-109. [5]PerrinJ,HansenB,KumpR,etal.Incidentdetectionalgorithmevaluation[R].Utah:UniversityofUtah,2001:8-14. [6] 莊斌,楊曉光,李克平.道路交通擁擠事件判別準(zhǔn)則與檢測(cè)算法[J].中國(guó)公路學(xué)報(bào),2006,19(3):82-86. [7] 李曉斌,徐建閩.基于RBF神經(jīng)網(wǎng)絡(luò)的高速公路交通狀況判別[J].計(jì)算機(jī)仿真,2011,28(2):350-353. [8] 肖永來(lái).基于SCATS采集數(shù)據(jù)的城市道路交通狀態(tài)判別技術(shù)研究[J].中國(guó)交通信息產(chǎn)業(yè),2005,7(6):39-41. [9] 楊媛,劉雪琴,彭玲玲.一種基于視頻的交通狀況檢測(cè)方法[J].電視技術(shù),2013,37(23):204-206. [10] 馬頌德,張正友.計(jì)算機(jī)視覺(jué)—計(jì)算理論與算法基礎(chǔ)[M]. 北京: 科學(xué)出版社,2003. [11]ShiX,LingH,BlaschE,etal.Context-drivenmovingvehicledetectioninwideareamotionimagery[C]//PatternRecognition(ICPR),2012 21stInternationalConferenceonIEEE,2012: 2512-2515. [12]ErbsF,BarthA,FrankeU.Movingvehicledetectionbyoptimalsegmentationofthedynamicstixelworld[C]//IntelligentVehiclesSymposium(IV),2011IEEE,2011: 951-956. [13]HuangDY,ChenCH,HuWC,etal.Reliablemovingvehicledetectionbasedonthefilteringofswingingtreeleavesandraindrops[J].JournalofVisualCommunicationandImageRepresentation,2012,23(4): 648-664. [14]SongJF,HuangC,XueR.Apracticalupdatingbackgroundmethodinmovingtargetdetection[C]//ConsumerElectronicsCommunicationsandNetworks(CECNet),2012 2ndInternationalConferenceonIEEE,2012:2322-2324. [15]YaoYJ,WangKF,XiongG.Embeddedtechnologyandalgorithmforvideo-basedvehiclequeuelengthdetection[C]//ServiceOperationsandLogisticsInformatics(SOLI),2013IEEEInternationalConference,2013:45-50. [16] 楊永輝,黃磊,劉昌平.基于視頻分析的車輛排隊(duì)長(zhǎng)度檢測(cè)[J].計(jì)算機(jī)應(yīng)用研究,2011,28(3):1037-1041. FASTTRAFFICSITUATIONDETECTIONALGORITHMBASEDONACTUALDISTANCEBETWEENVEHICLES SongJunfang1,2WangWeixing1ChenYan1XueShijiao1SongHuansheng1,3 1(School of Information Engineering,Chang’an University,Xi’an 710064,Shaanxi,China )2(School of Information Engineering,Tibet Institute for Nationalities,Xianyang 712082,Shaanxi,China )3(Shaanxi Engineering and Technique Research Center for Road and Traffic Detection,Xi ’an 710064,Shaanxi,China) Trafficsituationdetectionandearlywarningisanimportantpartintrafficinformationdetectionsystem,ithassignificantguidancemeaningtourbantrafficcontrolandinducement.Basedongrayscaleandedgefeaturesofvideoimages,inthearticlewefirstusedifferencealgorithmtocalculatethegrayscalegradientofpixelpointsinmiddlelineofeachlane,andthenforgradientfunction,accordingtodistanceclusteringanalysismethodwecompletetheaggregationofpulsesonitscorrespondingcurvesandthequantificationofnumberincombinationwithmappingrelationshipbetweenpixelanddistance;thenext,accordingtotheresultsofquantificationwemarktheregionswithandwithoutvehiclesoneachlane,andmakethestatisticsonthedistributiondensityoftheregionswithvehicles.Finally,combiningtheprocessingresultsofgrayscaleframedifferencesforpixelpointsonmiddlelineoflane,wegiveprecisejudgementonthetrafficsituations.Itisverifiedbyexperimentthatthealgorithmcanmakeaccurateandreal-timejudgmentfortrafficsituationsonroad,inaddition,thealgorithmissimpleandstable,andhasgoodpracticalvalue. TrafficsituationdetectionGrayscaledifferenceFramedifferenceMappingrelationshipbetweenpixelanddistance 2014-09-14。國(guó)家高技術(shù)研究發(fā)展計(jì)劃課題(2012AA112312);西藏民族學(xué)院校內(nèi)科研項(xiàng)目(14myY14);陜西省道路交通智能檢測(cè)與裝備工程技術(shù)研究中心開放基金(20120205110001)。宋俊芳,講師,主研領(lǐng)域:計(jì)算機(jī)視覺(jué),圖像處理,智能交通。王衛(wèi)星,教授。陳艷,碩士生。薛世焦,碩士生。宋煥生,教授。 TP391 ADOI:10.3969/j.issn.1000-386x.2016.03.046

4 測(cè)試結(jié)果與分析



5 結(jié) 語(yǔ)
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48