當機器人會分揀水果
2016-09-28 11:53:03沈建苗
IT經理世界 2016年6期
沈建苗
一家英國咨詢公司制造的一款水果分揀機器人聽起來不像是饒有興味的技術飛躍。實際上,它卻是最清晰地表明工業自動化即將迎來重大變化,我們可能邁入全新工業革命的技術杰作之一。
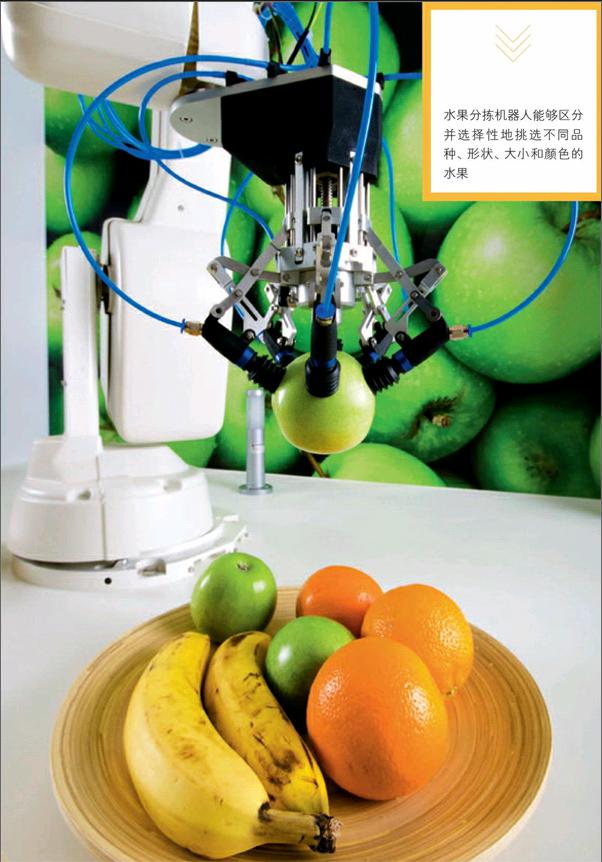
水果隨機地堆放在一只碗里面。機器人會利用機器視覺和智能軟件,識別最上面的水果。它會將該信息轉換成實際坐標,并確定末端操縱裝置的方位,抓取水果。末端操縱裝置會適應每個物體(水果)的形狀和紋理,在不破壞物體的情況下抓取。這個機器人會認真分析碗里的情況,按類別或顏色來分揀。
這是劍橋咨詢公司(CambridgeConsultants)研發出一種機器人夾具和視覺系統一一水果分揀機器人,能夠區分并選擇性地挑選不同品種、形狀、大小和顏色的水果。可從事復雜的拾取和涉及不規則組織項目任務,如分揀水果和蔬菜。
這個演示意義重大,它要求機器人執行的任務并不是嚴格定義,相反,機器人需要識別并適應牽涉幾個變化因素的復雜情形。
引人入勝的挑戰
普通機器人面臨的最大挑戰之一就是,無法處理物體的自然變化。比如在一條汽車生產線上,機器人能夠將重物從一個地方搬移到另一個地方,并且實現精準焊接。可是如果汽車門框稍稍變形或者位置不對,同樣那些機器人就束手無策。如果裝配過程中出現了什么岔子,管理人員就得將生產線停下來,重新調試一番。要是所處理的物體發生變化,就需要為機器人重新編程或重新配置,這個過程既費時又費錢。
而這基本上就是工業自動化在過去50年來的運作方式。但是未來學家們長期以來認為,有朝一日,工業機器人能夠與人一起工作,處理不規則物體,并且適應不斷變化的環境。這就是為什么分揀不同種類的水果是一項引人入勝的挑戰,這個挑戰需要物體識別和任務規劃技術。
雖然機器人通常是在在一個可控的環境中重復做著同樣的事情,如果任務或環境發生變化,他們就會方寸大亂。例如,要在倉庫中拾取水果和蔬菜,機器人必須要和人一起共事,并要處理不規則事項,應對不斷變化的環境。需要執行許多不同的任務,從識別對象,計算拾取順序,計劃抓取、放置的先后順序。
“傳統機器人在處理不確定的事項時會出現混亂。我們將現有技術與新的信號處理技術相結合研發出新型系統設計,這是準備要擾亂行業的節奏啊。”劍橋咨詢公司的工業機器人負責人克里斯·羅伯茨(Chris Roberts)說:“我們的世界級工業傳感和控制團隊將高效率圖像處理算法與低成本傳感器和大眾化硬件結合起來,以便任務不是嚴格定義時,讓機器可以實現‘軟控制。即使面對的物體缺少詳細的計算機輔助設計模型,系統也能夠處理。”
通過將水果隨意堆砌在碗中對此技術進行測驗,機器人通過其機器視覺系統和一些智能軟件,以確定哪些水果片放在上面。可準確定位要拾取哪一個水果,并同時不會碰到旁邊對象。機器人手剛好適合水果的形狀并牢固夾住水果而不造成損壞,并且可對水果進行顏色分類。
低成本
這種設計的“低成本”方面則是另一大突破。劍橋咨詢公司是一家設計公司,并不從事制造新產品的業務。為了設計這款演示機器人,公司的工程師們使用了成本低廉的傳感器,這類傳感器隨處可見,已經廣泛應用于工業界。換句話說,要制造該機器人,該團隊不需要發明任何新技術。只要巧妙地運用現有的解決方案,就是這么回事。
羅伯茨最近表示:“現有的解決方案往往部署起來成本高昂。我們在努力表明這一點,即通過使用成本相對便宜的硬件和傳感器,以及眾多巧妙的圖像處理軟件,我們就能獲得良好的效果。”
羅伯茨認為,這項技術會在不遠的將來徹底改變工業自動化領域,而這項技術的大部分已經到位,等待合理利用。“我們看到與工業實際應用存在脫節。我們在好多大學看到許多諸如此類的點子,到時會有實驗室演示,表明這種技術是可行的;但是缺少的是實現工業化。關鍵在于,讓實驗室環境下可行的技術進入到工業環境。”
而這項技術正在實現這種轉變,通過將編程、電子和機械工程專業與機器視覺和機器人技術相結合,展示出智能系統可實現對各種工業商業過程進行轉換。它將改變制造和交付產品的方式。劍橋咨詢公司預計,此項技術將提高整個生態鏈的生產效率。
“我們看到的一個趨勢是,一大批技術現在趨于融合。有物聯網,有高性能計算機,還有可與人交互的機器人技術,它們都融為一體,讓更智能的工廠能夠更迅速地響應需求。”
在機器人技術方面,這意味著我們會看到更靈活的系統能夠迅速變換角色,處理不同的任務。