Voice Coil Motor Position Control Based on Feed—forward Fuzzy PID
2016-10-11 09:39:17YINFeng-songPANSo
科技視界 2016年24期
YIN+Feng-song PAN+Song-feng LI+Xin


【Abstract】Conventional PID algorithm is unable to track the response with high frequency,and has obvious overshoot in some voice coil motor practical applications.So,combined with the fuzzy PID control theory,we can obtain the precise control by the method.Meanwhile,through the feed-forward control,the performance of quick response and dynamic tracking can be improved.Thus,this control method not only maintains the excellent performance of the controller,but also improves the stability of the system.
【Key words】Voice coil motor; Fuzzy control; Differential forward PID control; Feed-forward control
1 Introduction
Voice Coil Motor is a special structure of DC drive motor,in order to control it accurately,first,drawing on the basic mathematical model of voice coil motor[1],determining mathematical model of driving circuit. Then,referring to DC motor position control system,hoping that the fuzzy algorithm in tracking performance of the motor will achieve good result. Referring to the papers control algorithm[2],the structure of two-dimensional fuzzy PID control has been used on this model,adjust the membership function and optimize the fuzzy rules in order that it shows a good performance.By adding feed-forward control method[3],the quick response characteristic of system and the dynamic tracking have a good performance.From the perspective of the realization,analyze the stability of the control system.Simulation results show that the control system can satisfy the requirement of dynamic tracking performance.
2 Voice Coil Motor Position Control System Design
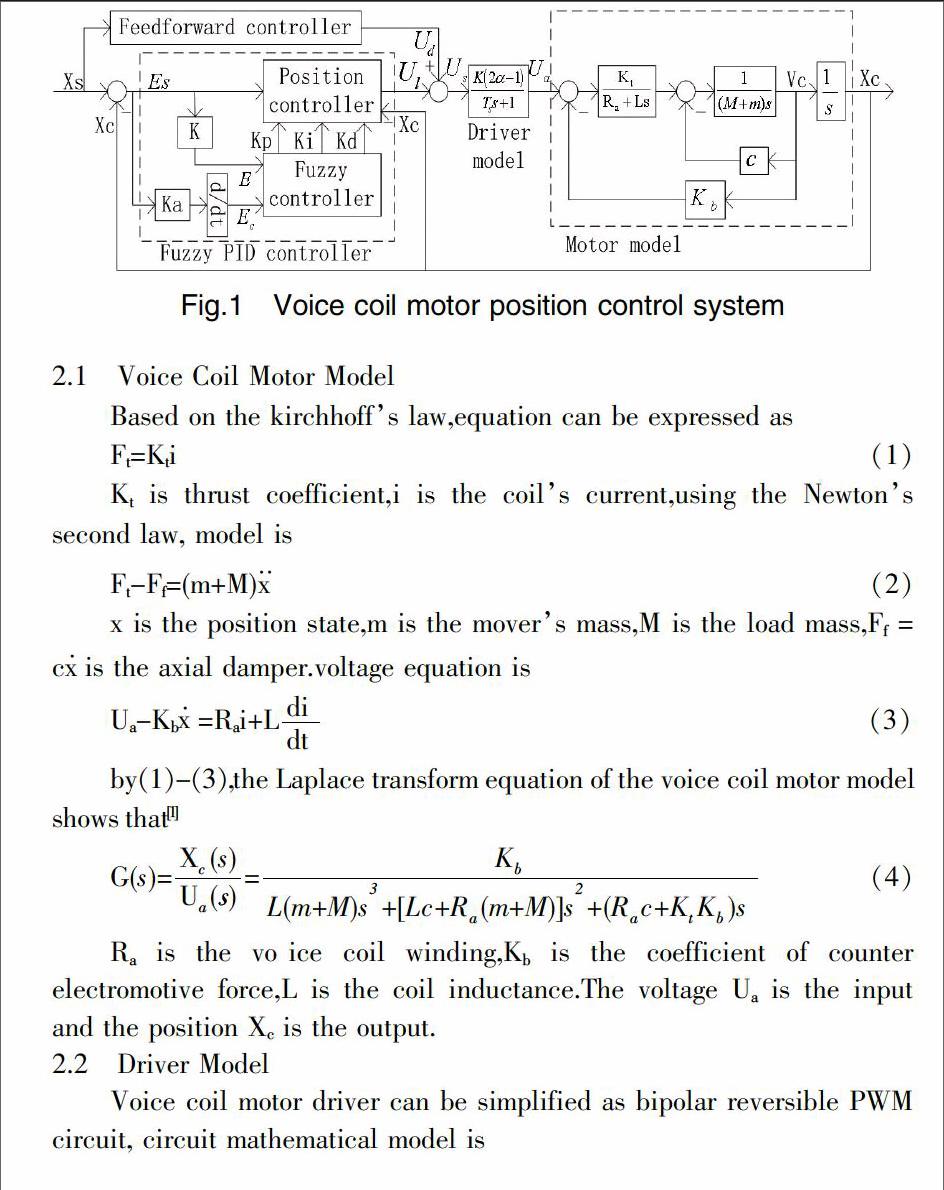
Fig.1 Voice coil motor position control system
2.1 Voice Coil Motor Model
Based on the kirchhoffs law,equation can be expressed as
Ft=Kti(1)
Kt is thrust coefficient,i is the coils current,using the Newtons second law, model is
Ra is the voice coil winding,Kb is the coefficient of counter electromotive force,L is the coil inductance.The voltage Ua is the input and the position Xc is the output.
2.2 Driver Model
Voice coil motor driver can be simplified as bipolar reversible PWM circuit, circuit mathematical model is
2.3 Feed-forward controller model
Through speed feed-forward and acceleration feed-forward improve high frequency response,The model shows that
2.4 Fuzzy PID Controller Model
Taking into account the actual engineering problem about the influence of disturbance factors,this paper takes the differential forward PID control mode,as follows
the parameters of position controller are
Kpl=Kp+Kp0,Kil=Ki+Ki0,Kdl=Kd+Kd0(8)
KpKiKd are fuzzy controller outputs,and Kp0Ki0Kd0 are initial parameters
Then,select the appropriate fuzzy rules,as follows
If x is E* and y is E*c,then v is K*p and w is K*i and z is K*d(9)
Reference PID model,obtain variation law of the error,the derivative of error and the output,and then by the range of those variation,the domain of input variables E Ec can be expressed as[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],the domain of the interval about output variables Kp Ki and Kd[-3,-2,-1,0,1,2,3].
Adjusting the membership function, as follow
According to the distribution of the membership function,after debugging the fuzzy rules,some optimal parameters show in the table
3 Stability analysis of the voice coil motor position system
Using the Lyapunov stability theorem to analysis the discretization feed-forward fuzzy PID control systems stability.according to(9),under the discrete state,the relationship expression between Es and Ul is
According to the Lyapunov stability theory,the system is asymptotically stable.
4 Simulation Results
The voice coil motor (model VCAR0022-0448-00A) parameters are as follows:the mover mass is 0.052kg,and load mass is 0 kg,the force constant is 4N/A,the back electromotive force constant is 4V/M/S,moving coil resistance is 2.6Ω,inductanceis 0.64mH,ignoring Lm and Lc influence.The discrete system sampling time T is 5ms,the duty ratio is 0.8,the amplification factor K is 12.In this paper, according to the eEEP-03 drive platform,knowing that this controlling unit is approximated as a proportion unit,the ratio of the coefficient is 7.2.The acceleration and the velocity gain are 0.0005 and 0.049 respectively in the feed-forward control.Error E coefficient K is 6 and Ec coefficient Ka is 1.1.the parameters of Kp0Ki0Kd0 were 16 11 1.02.In the Matlab simulation, give step signal and sine signal as input respectively, the response waveform as shown below,the blue line as the input signal, the green line is the PID response curve, the red line for the feed-forward fuzzy PID response curve.
Fig.3 Sine response curve
Fig.4 Step response curve
simulation result shows that, feed-forward fuzzy PID has a rapid response and stability, and overshoot suppression has greatly improved. The fast tracking performance is obviously better than the PID.
5 Concluding Remarks
This article use the feed-forward fuzzy differential PID to improve the traditional PID, through the method, the control system has strong robustness. Then, through the idea of simplification, the method is more practicability in some application field.
【References】
[1]Zheng J,Fu M,Wang Y,et al.Nonlinear Tracking Control for a Hard Disk Drive Dual-Stage Actuator System[J].IEEE/ASME Transactions on Mechatronics,2008,13(5):510-518.
[2]Tang K S,Man K F,Chen G,et al.An optimal fuzzy PID controller[J].IEEE Transactions on Industrial Electronics,2001,48(4):757-765.
[3]Yoshida K,Ohashi T,Ohishi K,et al.Design of a feed-forward control system considering dead time for optical disc systems[C]// Mechatronics(ICM),2015 IEEE International Conference on.IEEE,2015:648-653.
[責任編輯:李書培]