欠驅動水面模型船航向保持控制仿真平臺
2016-10-12 01:32:45,,,4,
中國航海 2016年4期
, , ,4,
(1.武漢理工大學 ITS智能交通系統研究中心, 武漢 430063; 2.武漢理工大學 能源與動力工程學院, 武漢 430063; 3.國家水運安全工程技術研究中心, 武漢 430063; 4.武漢理工大學 物流工程學院, 武漢 430063)
欠驅動水面模型船航向保持控制仿真平臺
柳晨光1,2,3,初秀民1,3,歐陽雪1,3,4,謝朔1,2,3
(1.武漢理工大學ITS智能交通系統研究中心,武漢430063; 2.武漢理工大學能源與動力工程學院,武漢430063; 3.國家水運安全工程技術研究中心,武漢430063; 4.武漢理工大學物流工程學院,武漢430063)
考慮到計算機仿真、半實物仿真及實船研究的不足,提出基于欠驅動水面模型船的航向保持控制仿真平臺。該平臺由模型船、航向與航速感知系統、航向保持控制器及遠程控制與監測系統等4部分組成。介紹航向控制仿真平臺各部分的組成和相互關系,研究模型船航向與航速感知系統的實現方法,分析航向保持控制器的工作原理,提出Nomoto響應模型的參數辨識方法及基于PID的航向保持控制和航速保持方法。在實驗室環境下對仿真平臺進行測試,并分析模型參數辨識和航向保持結果,試驗結果表明平臺能滿足航向保持控制研究需求。
船舶工程;航向保持;運動控制;模型船;參數辨識;仿真平臺
Abstract: Considering that the computer simulation, hardware-in-the-loop simulation or full scale ship are inconvenient or costly, a course keeping control simulation platform based on an underactuated surface model ship is proposed. This platform is composed of four parts: the model ship, the heading and speed perception system, the course keeping controller, and the remote control and monitoring system. The composition of each part and the relationship between these parts are set forth. The implementation of course and speed perception system is designed; the working principle of course keeping controller is analyzed; and the parameter identification of Nomoto response model and the PID-based course-speed keeping control stratages are put forward. The simulation platform is tested in the laboratory conditions. The test results of parameter identification and course keeping are analyzed, which shows that the platform can meet the requirements of course keeping control research.
Keywords: ship engineering; course keeping; motion control; model ship; parameter identification; simulation platform
為盡快到達目的港和減少燃油消耗,使船舶以一定的速度直線航行是航向保持控制領域研究的主要內容之一。[1-2]由于船舶運動具有大慣性、大時滯和非線性等特性,運動模型參數又與航行工況(包括載重量、航速及船型等)密切相關,目前自動舵還很難實現自適應控制,因此有必要進一步研究船舶航向保持控制問題。[3]
考慮到成本和可控性等因素,常通過仿真來研究此類問題。航向保持控制仿真研究一般有計算機仿真、半實物仿真和模型船仿真等3種方式。
1)計算機仿真完全基于計算機平臺進行,系統模型、輸入和輸出均由計算機生成。[4]
2)半實物仿真又稱硬件在回路仿真,在條件允許的情況下盡可能地在仿真系統中接入實物,以取代相應部分的數學模型,這樣更接近實際情況,得到的信息更確切。[5]但是,該方式仍無法避免某些數據需依靠計算機仿真來生成。
3)模型船仿真以與真實船的運動特性幾乎相同的模型船為對象來研究船舶運動控制等問題,仿真過程中所設計的運動控制器只需調整相應參數即可應用于真實船,可避免模型不匹配、控制實時性難以保證和魯棒性不強等問題。
考慮到目前絕大多數船舶沒有側推器,是以欠驅動方式航行的,提出一種以航向保持控制為研究目標、以欠驅動水面模型船為研究對象的運動仿真平臺。首先對仿真平臺的組成和結構進行介紹;然后具體描述航向與航速感知系統實現方法;接著從船舶運動模型建立、基于最小二乘法參數辨識方法、基于PID的航速保持和航向保持方法研究等方面分析航向保持控制器的實現過程;最后測試仿真平臺的性能,并分析試驗結果。
1 平臺結構
欠驅動水面模型船航向保持控制仿真平臺由模型船、航向與航速感知系統、航向保持控制器及遠程控制與監測系統等4部分組成,其結構見圖1。
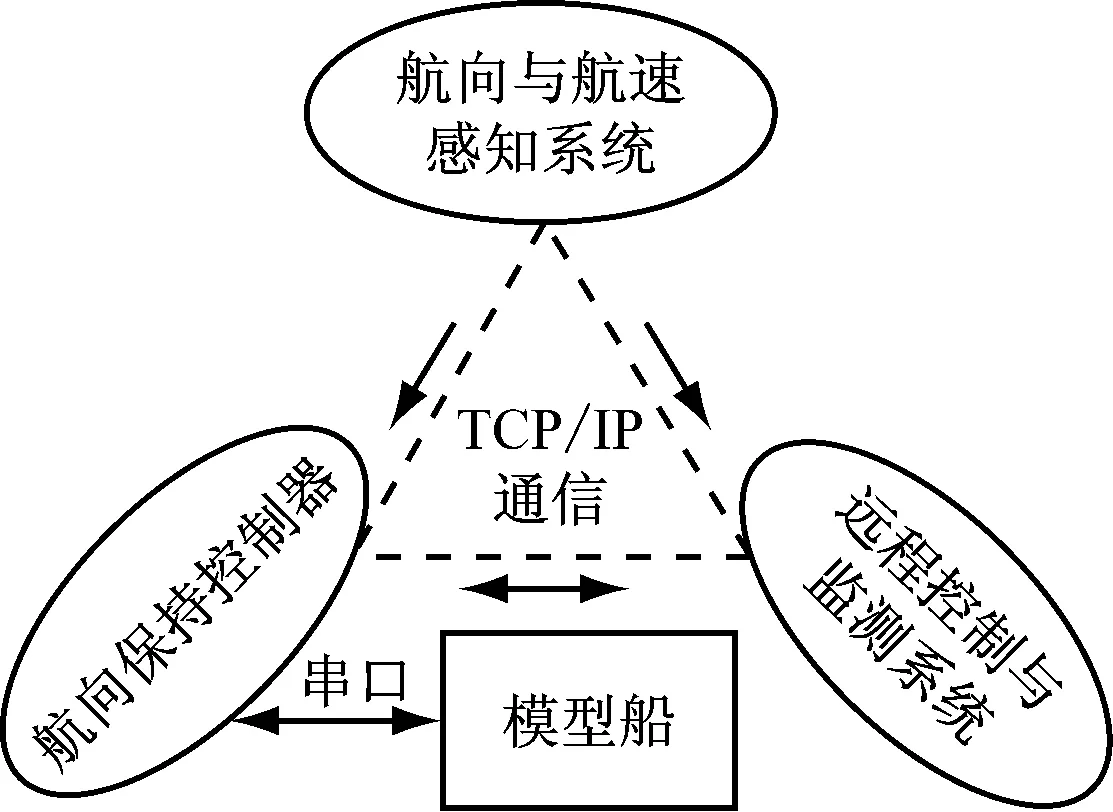
圖1 欠驅動水面模型船航向保持控制仿真平臺結構
1.1 模型船
模型船是該平臺的控制對象,裝有小型船載計算機、驅動電路板和傳感器等,其中:小型船載計算機是整個船舶運動控制的“指揮官”,航向保持控制器就運行在該計算機上;驅動電路板可通過串口與船載計算機通信,用于傳感器數據處理、指令解析和執行機構(螺旋槳和舵機)控制;傳感器主要包括光電編碼器、超聲波傳感器和無線通信模塊等。
1.2 航向與航速感知系統
該平臺是采用閉環控制策略進行航向保持控制的,因此有必要實時獲取船舶航向;在控制過程中,為保持航速不變,有必要實時獲取船舶航速。該系統通過采用單目視覺定位方法為航向保持控制提供實時的航向和航速數據。
1.3 航向保持控制器
航向保持控制器接收到船舶航向與航速數據之后,根據航向保持控制算法計算得到舵角控制指令,進而控制舵機執行舵角操作;根據航速控制算法計算得到螺旋槳控制指令,進而維持船舶航速不變。
1.4 遠程控制與監測系統
船舶航向保持控制過程中的航向、航速、舵角及螺旋槳轉速等數據會實時發送至該系統,實現船舶航行狀態參數的實時監測及航向、舵角、螺旋槳轉速等數據的實時存儲,供后續研究分析使用。同時,遇到緊急情況時該系統可人工遠程操控船舶,以保證其安全航行。該系統是基于WIFI無線網絡通過Windows遠程訪問實現模型船的控制和監測的。
圖2為平臺各子系統的組成及相互間的關系。
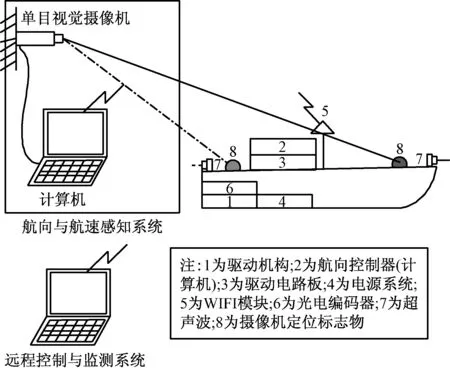
圖2 平臺各子系統的組成及相互間的關系
2 航向與航速感知系統
感知航向和航速是進行航向保持控制的基礎。由于模型船尺寸較小,因此為實現航向的精準控制,對航向和航速的精度有較高的要求。需指出,船舶航向保持控制中的“航向”通常是指“艏向”。[6]在真實船舶中,常采用磁羅經或陀螺羅經來獲取實時航向,但磁羅經易受外界磁力的干擾,陀螺羅經易受航速、沖擊及電源不穩等因素影響,因此不適合應用在模型船上。在船舶航向保持控制過程中,應盡量保持航速不變,但受風、浪、流及操舵的影響,航速會發生變化,因此有必要實時獲取航速,將其作為反饋來保持航速基本不變。對于對航速精度要求較高的場合,常采用全球衛星導航系統差分定位及全球衛星導航系統與慣性導航融合定位的方式獲取航速。但是,差分定位因成本較高、差分接收機質量大而很難在模型船上使用。融合定位成本也較高,且定位誤差會積累,也不適用于模型船。[7-8]鑒于此,提出一種基于單目視覺的水面船舶航向與航速感知系統,系統結構見圖3。
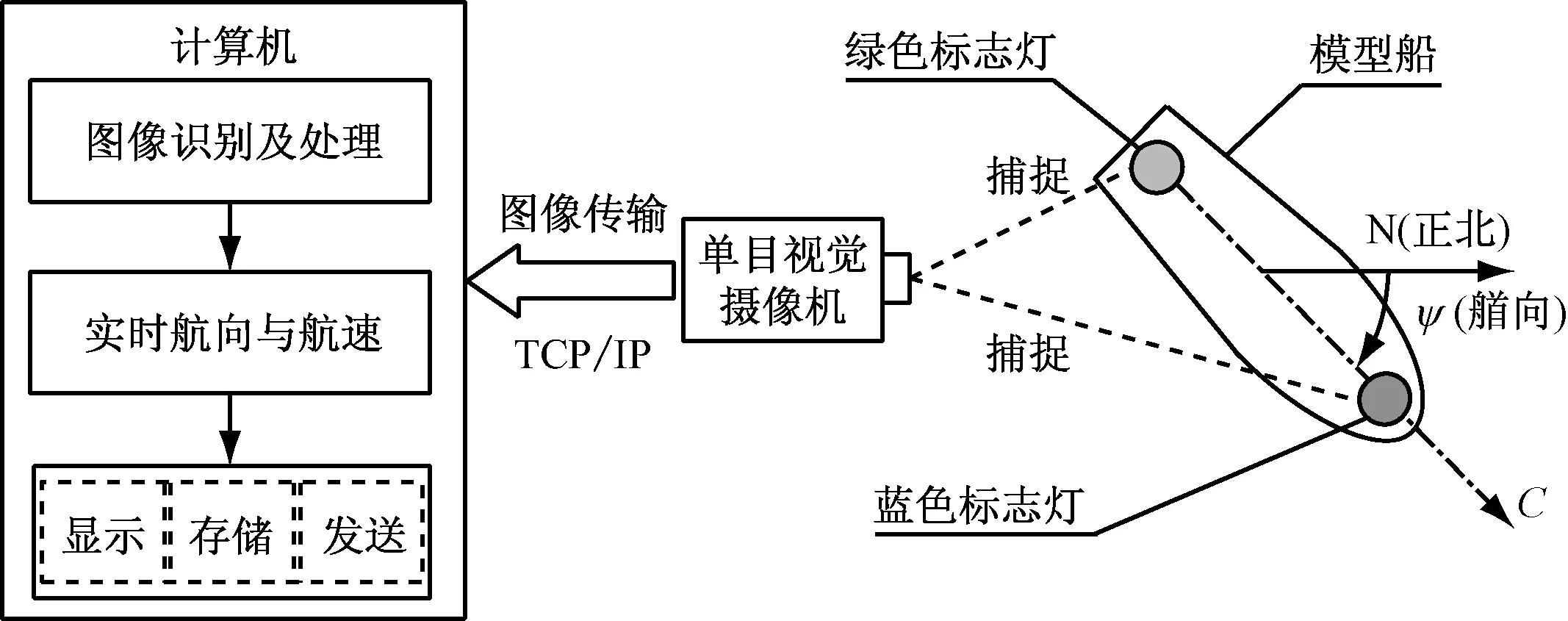
圖3 航向與航速感知系統結構
不同于一般的單目視覺定位系統,該系統旨在實時獲取模型船的航向角和航速。單目視覺攝像機獲取船舶航向與航速的基本原理為:
1)根據標志燈顏色特征、封閉輪廓面積特征及船舶航速特征分別識別船舶上的藍色和綠色標志燈,得到2個標志燈在圖像坐標中的位置,經過坐標轉換分別確定2個標志燈的真實位置;以2個標志燈的中點作為船舶重心,根據單位時間內船舶的位移計算出船舶航速。
2)由于2個標志燈可分別進行識別,因此綠色標志燈指向藍色標志燈的矢量與正北的夾角即為船舶航向角(0°~360°)。
3)獲取的航向與航速能通過WIFI實時發送至模型船主機,為模型船航向保持控制提供反饋。
4)航向與航速數據實時顯示在計算機上,并存儲至數據庫中。
3 航向保持控制器
該平臺的航向保持控制器通過控制舵角使船舶按照預設的航向航行;通過控制螺旋槳的轉速使船舶航速保持不變;通過緊急避碰模塊防止船舶碰撞。船舶避碰是一個很復雜的過程,涉及障礙物感知、路徑規劃和航跡控制等。這里的緊急避碰僅指緊急情況下的應急控制。航向保持控制的輸入為預設航向與航速,反饋輸入為實時航向與航速,輸出為舵角,控制模型為Nomoto一階線性模型。航向保持控制器工作原理見圖4。
航向保持控制器運行于上位機,通過TCP/IP通信方式與航向與航速感知系統和遠程控制與監測系統通信,通過串口通信方式與驅動電路板通信;驅動電路板可控制舵機和螺旋槳。航向保持控制器接收來自于航向與航速感知系統的模型船實時航向和航速,根據設定航向與感知航向的偏差,基于航向保持控制模型給出下一時刻舵角的輸出值;根據設定航速與感知航速的偏差,基于航速保持模型確定螺旋槳轉速的輸出值。舵角和螺旋槳轉速控制輸出值轉換為指令格式,并通過串口收發器發送至驅動電路板;電路板上的微處理器對指令進行解析,并控制舵機和螺旋槳。驅動電路板上配置的光電編碼器和超聲波測距儀可分別測量螺旋槳的轉速及模型船與前后障礙物的距離,將這些數據轉換為報文后通過電路板串口發送至上位機;上位機對這些數據進行解析后為航速保持控制器和緊急避碰模塊提供數據支持。遠程控制與監測系統通過TCP/IP遠程訪問上位機,能獲取航向保持控制過程中的各種參數,并可在需要時進行遠程操控。
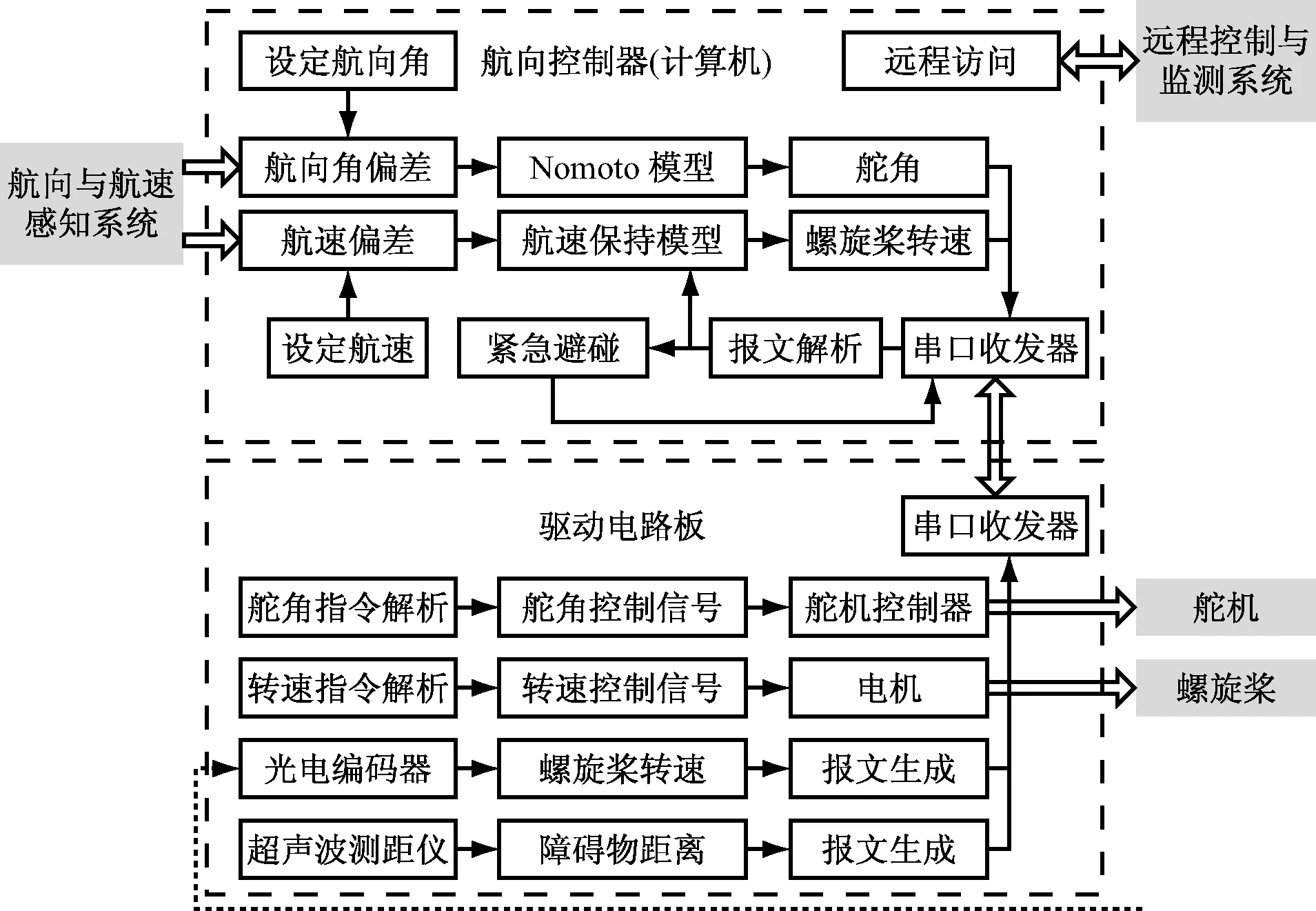
圖4 航向保持控制器工作原理
為實現航速和航向的精確控制,有必要對模型參數進行精確辨識,在獲取模型參數的基礎上完成航速保持和航向保持控制。
3.1 一階K-T模型
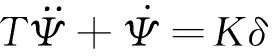
日本學者野本謙作基于船舶操縱線性方程,從控制工程的觀點研究船舶操縱性問題,建立船舶操縱響應方程,提出表征船舶操縱性的指數。[9]艏搖響應線性方程為
(1)
式(1)中:δ為操舵角;r為轉艏角速度;K,T1,T2,T3為操縱性指數。式(1)稱作二階線性K-T方程。此后野本謙作又提出,在操舵不是很頻繁的情況下,式(1)可用式(2)近似代替。

(2)

(3)
將式(3)轉換為傳遞函數形式[10],可表示為
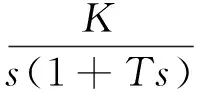
(4)
3.2 參數辨識
為確定該平臺模型船的航向運動特性,需確定式(4)中K和T的值。該仿真平臺采用最小二乘法對Nomoto一階K-T模型進行參數辨識。參數辨識的流程為:
1)通過Z型試驗獲取參數辨識所需的輸入、輸出數據;
2)對獲取的數據進行處理;
3)利用最小二乘法辨識模型參數;
4)利用已辨識的K和T進行操縱性預報,驗證參數辨識的正確性。
3.3 航速保持
航速保持是指模型船航行過程中,在風、浪、流及操舵的影響下,通過控制螺旋槳轉速來保持航速不變。該平臺采用PID方法建立航速保持模型,模型輸入為航速偏差,模型輸出為螺旋槳轉速增量。
3.4 航向保持控制
目前已有神經網絡、滑模控制、模糊控制和專家系統等多種控制方法被應用或被嘗試應用到船舶航向保持控制中,且已取得一些成果;但考慮到上述方法在可靠性和魯棒性等方面存在不足,在真實船舶航向保持控制中很少應用這些方法。[1,11-12]該平臺提供與真實船舶控制幾乎相同的試驗環境,能為一些高級或智能算法的實際應用提供測試平臺。為驗證該平臺的航向保持控制性能,選擇最易實現的PID對船舶航向進行跟蹤控制。
4 試驗測試及分析
為驗證模型船航向保持控制仿真平臺的航向保持控制性能,進行水池環境下的航向跟蹤試驗,試驗環境見圖5。水池大小為2 m×5 m,模型船尺寸為92.5 cm×23.5 cm,模型船采用單槳單舵方式控制。
4.1 Nomoto模型參數辨識
模型船Z型模型參數辨識結果見圖6。根據圖6中的數據,利用最小二乘法辨識出式(4)中的參數K=1.05,T=0.72。利用已辨識出的K和T對船舶Z型試驗進行預報,可看出預報結果與真實試驗數據比較接近,說明參數辨識結果是可靠的。
4.2 航向跟蹤試驗
航向跟蹤是使模型船按照預設的航向航行,且在航行過程中通過不斷控制舵角保持航向不變。經標定,該平臺航向跟蹤試驗PID控制參數為:kP1=10;kI1=0;kD1=6。預設跟蹤航向為180°,起始航向設為150°,航向跟蹤試驗結果見圖7。由圖7可知,經過不斷調整舵角,船舶航向逐漸穩定至目標航向。
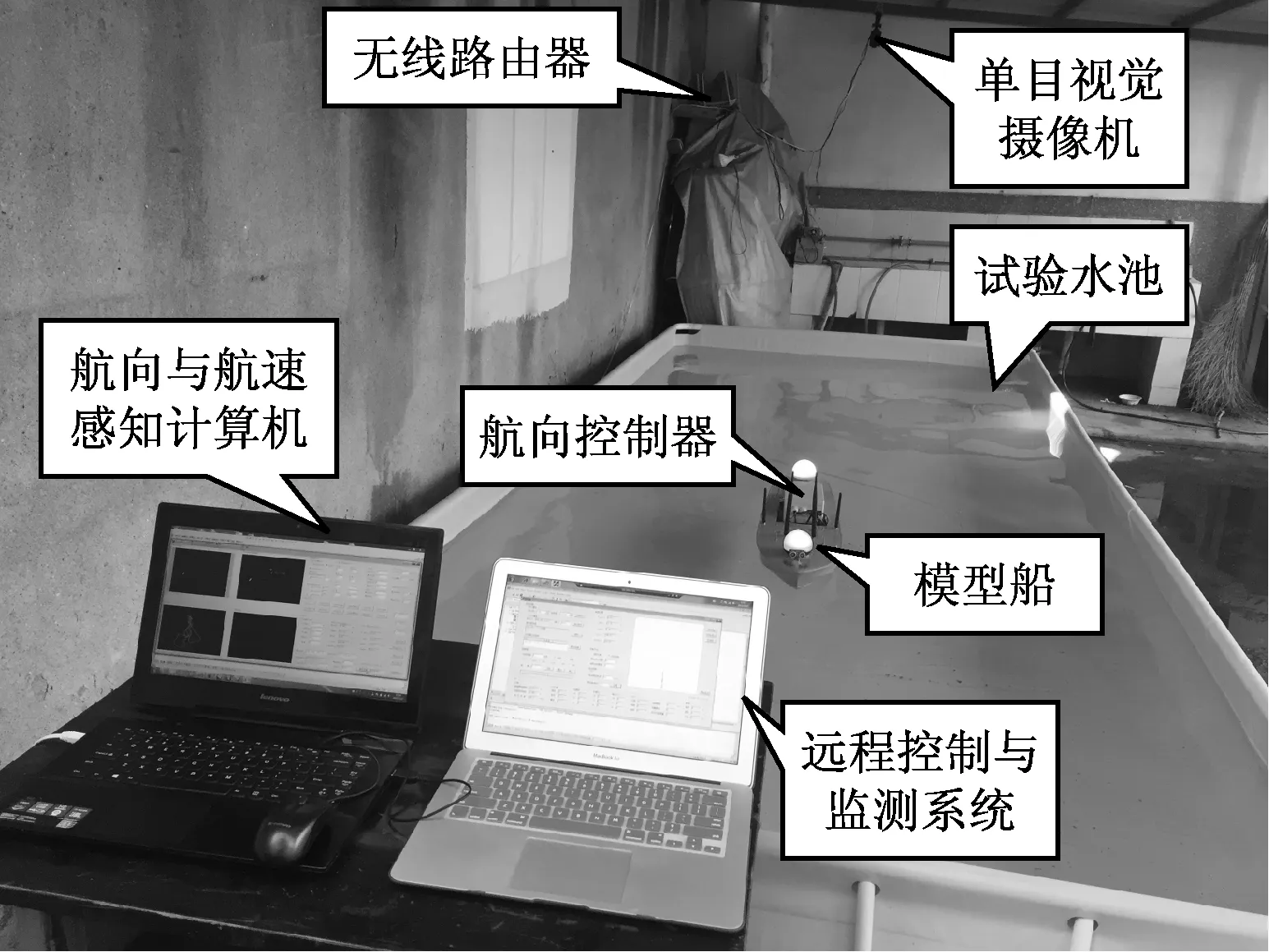
圖5 試驗環境
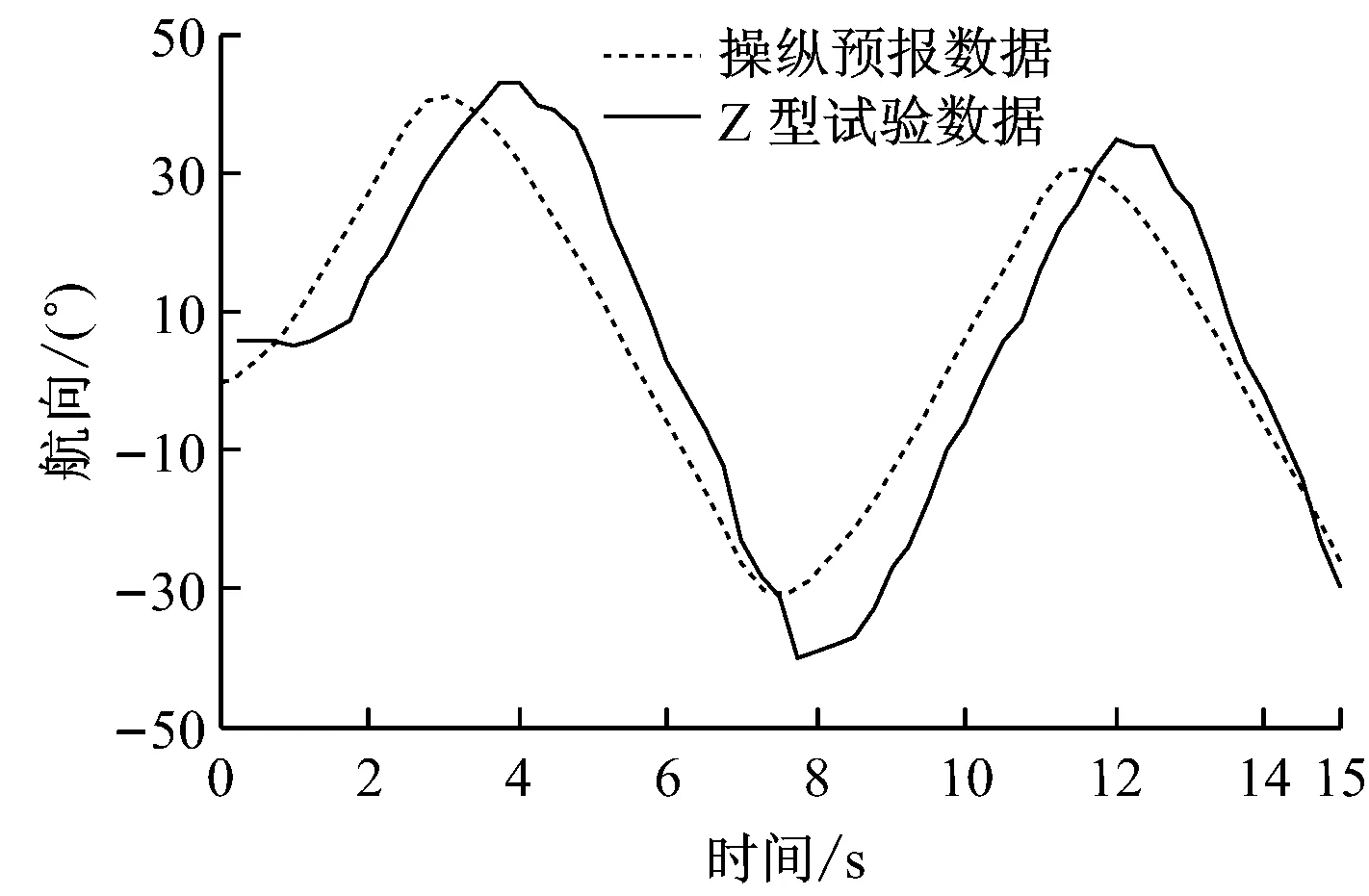
圖6 一階K-T模型參數辨識結果
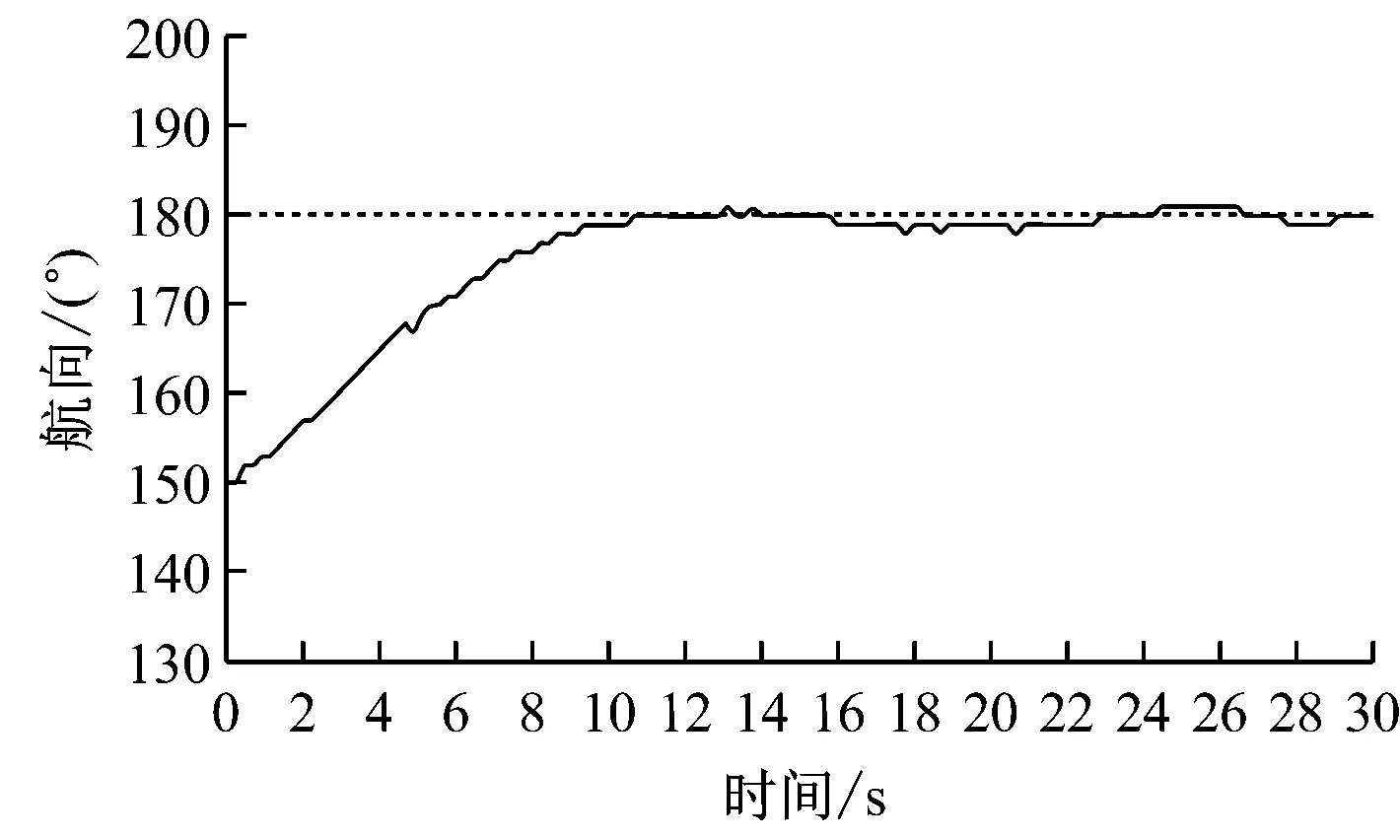
a) 航向隨時間變化

b) 舵角隨時間變化
4.3 航速保持模型
經標定,適合該平臺的航速保持PID參數為:kP2=0.005;kI2=0;kD2=0.003。在上述試驗環境下進行航速保持跟蹤試驗,通過控制螺旋槳的轉速使模型船從初始航速0 m/s逐漸控制在目標航速0.4 m/s左右。航速保持控制試驗結果見圖8。
4.4 遠程控制與監測系統
在模型船航行時,遠程控制與監測系統能訪問船載計算機,觀測模型船的實時運行狀態,并能在必要時通過人工方式控制模型船。遠程控制與監測系統運行界面見圖9。
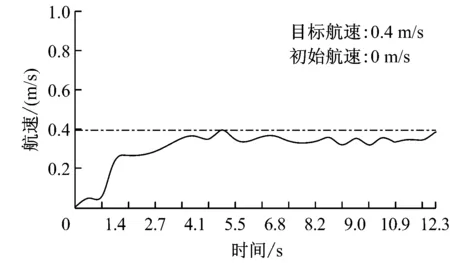
a) 航速隨時間變化
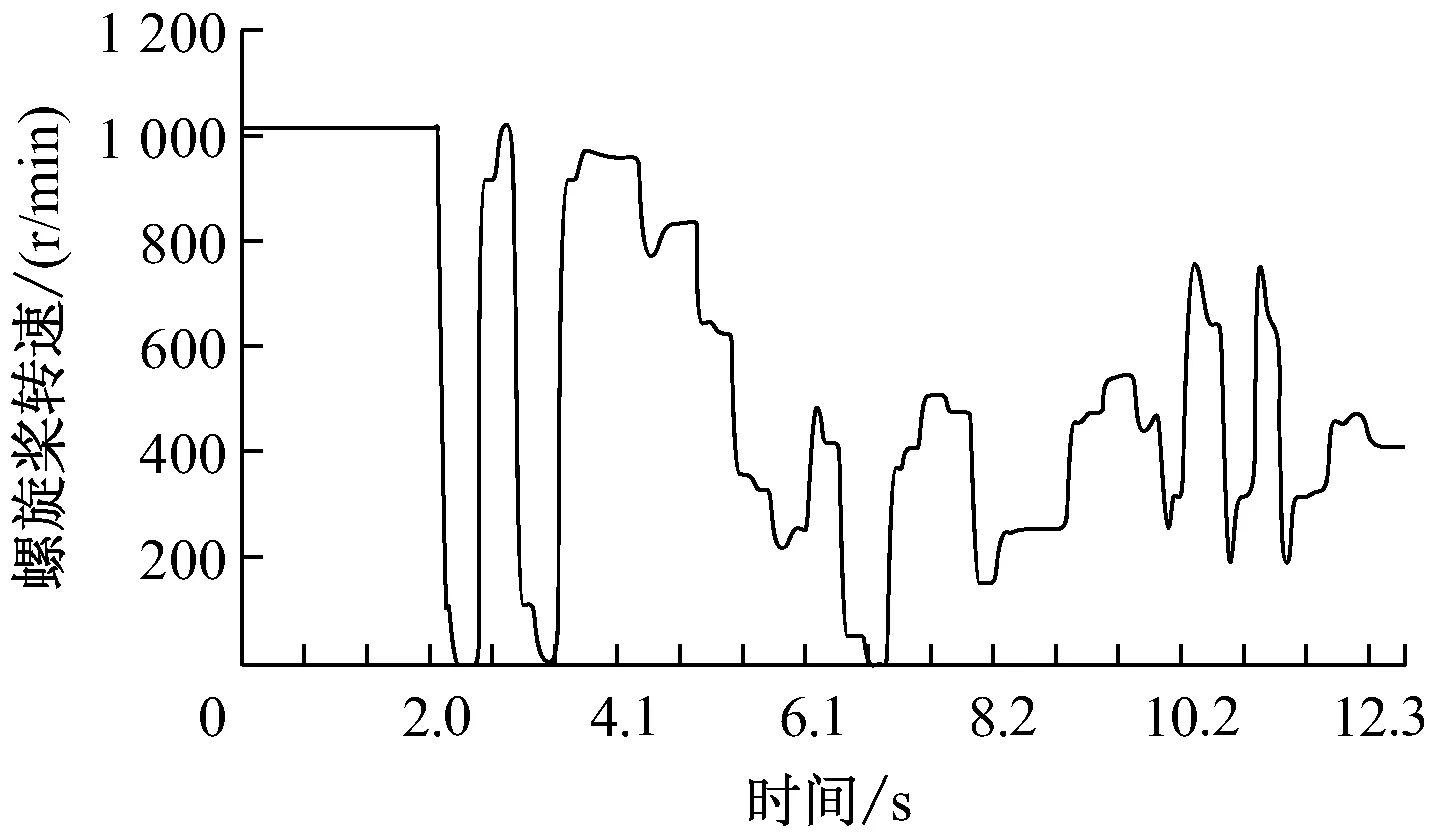
b) 螺旋槳轉速隨時間變化
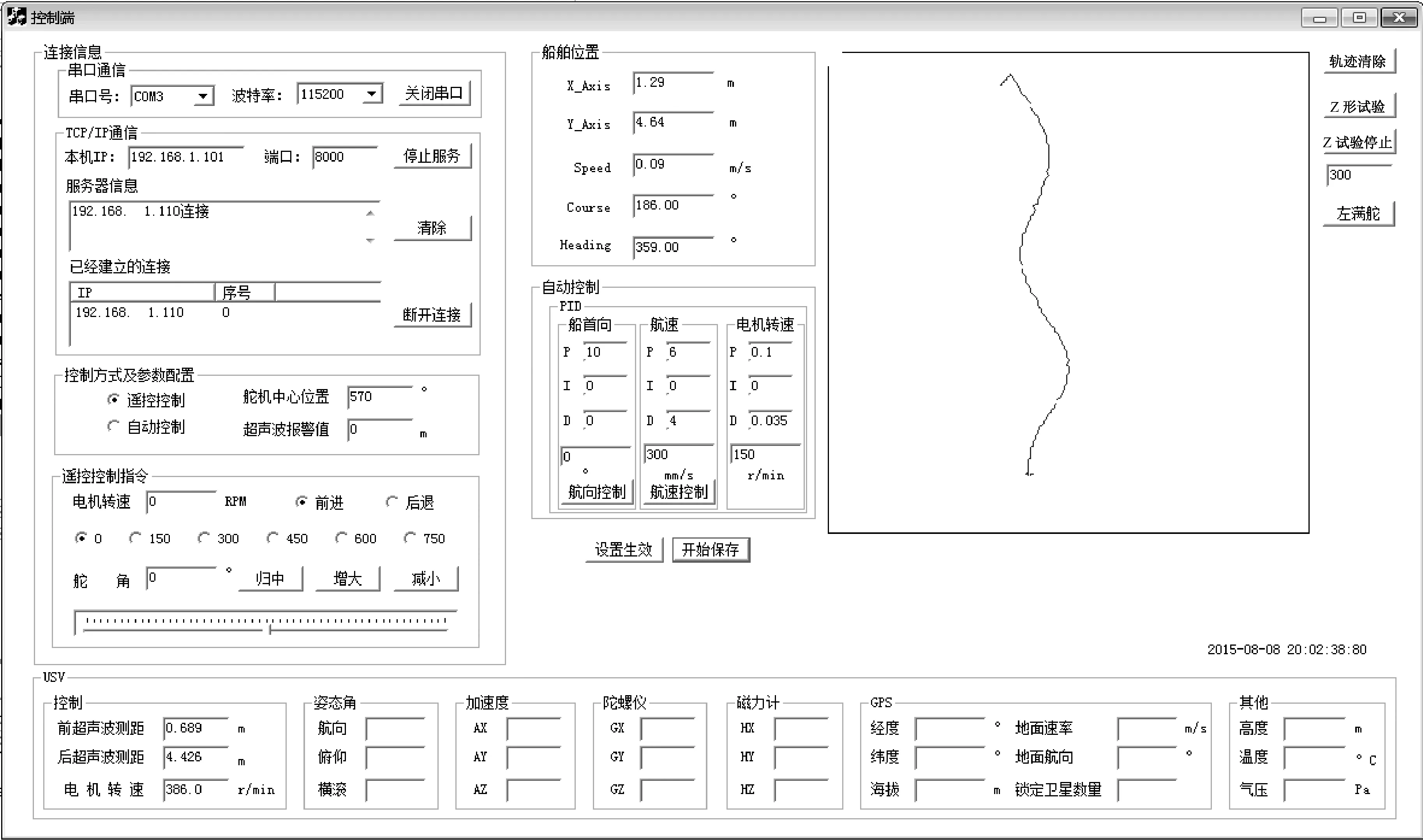
圖9 遠程控制與監測系統運行界面
5 結束語
構建基于欠驅動水面模型船的航向保持控制仿真平臺,并在試驗水池環境下驗證平臺的性能。建立遠程控制與監測系統,實現模型船人工控制及控制過程中各項數據的遠程查看和存儲。建立基于單目視覺的航向與航速感知系統,提出基于最小二乘法的船舶航向保持控制一階K-T模型參數辨識方法,并通過Z型試驗驗證辨識方法的有效性。提出基于PID的船舶航向與航速保持方法,在試驗水池環境下測試航向跟蹤和航速保持性能。
該平臺具有船舶定位精度高、操作簡便和系統可控等優點,不僅能完成航向保持控制研究,還能為今后開展船舶軌跡跟蹤控制、航跡控制及魯棒控制等提供測試平臺支持。
[1] 丁航成. 船舶航向智能PID控制算法研究[D]. 大連:大連海事大學, 2010.
[2] WITT N A J, SUTTON R, MILLER K M. Recent Technological Advances in the Control and Guidance of Ships[J]. Journal of Navigation, 1994, 47(2): 236-258.
[3] 徐國平,張顯庫. 基于網絡的船舶航向保持控制仿真平臺設計[J]. 中國航海,2015,38(1):1-3.
[4] 沈智鵬,楊楊,郭晨,等. 船舶運動控制硬件在環仿真系統的研究[J]. 系統仿真學報,2010,22(12):2838-2841.
[5] 劉延斌,金光. 半實物仿真技術的發展現狀[J]. 光機電技術,2003(1): 27-32.
[6] 周娜. 基于單目視覺的攝像機定位技術研究[D]. 南京:南京航空航天大學,2007.
[7] 張顯庫. 用航向偏差的正弦函數驅動的自動舵控制算法[J]. 中國航海,2011,34(1):1-4.
[8] 金輝,胡福喬. 差分GPS定位技術在ITS中的應用[J]. 計算機工程,2002,28(10):200-202.
[9] 梁霄,李巍. 船舶操縱性與耐波性[M]. 大連:大連海事大學出版社,2012: 15-16.
[10] 張顯庫,王新屏. 關于船舶Nomoto模型的進一步思考[J]. 航海技術,2008(2):2-4.
[11] 卜仁祥,劉正江. 迭代滑模增量反饋及在船舶航向控制中的應用[J]. 哈爾濱工程大學學報,2007,28(3):68-272.

Simulation Platform for Course Keeping Control of Underactuated Surface Model Ships
LIUChenguang1,2,3,CHUXiumin1,3,OUYANGXue1,3,4,XIEShuo1,2,3
(1. Intelligent Transport System Research Center, Wuhan University of Technology, Wuhan 430063, China; 2. School of Energy and Power Engineering, Wuhan University of Technology, Wuhan 430063, China; 3. National Engineering Research Center for Water Transport Safety, Wuhan 430063, China; 4. School of Logistics Engineering, Wuhan University of Technology, Wuhan 430063, China)
1000-4653(2016)04-0001-05
U664.82;TP391.9
A
2016-07-15
湖北省自然科學基金(2015CFA111);交通運輸部科技成果推廣項目(2015326548030)
柳晨光(1988—),男,江西九江人,博士生,從事船舶智能化與運動控制研究。 E-mail: liuchenguang@whut.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45