基于高頻脈振信號注入的永磁同步電機轉子初始位置辨識
2016-10-13 20:56:44何忠祥李明勇
船電技術 2016年3期
何忠祥 ,李明勇,朱 磊
?
基于高頻脈振信號注入的永磁同步電機轉子初始位置辨識
何忠祥 ,李明勇,朱 磊
(武漢船用電力推進裝置研究所 ,武漢 430064)
基于高頻脈振信號注入的轉子初始位置辨識會存在收斂不成功的現象,這直接影響了電機的啟動轉矩。針對這一現象,本文首先建立了表貼式永磁同步電機在高頻信號注入時的數學模型,并對初始位置辨識策略的收斂特性進行了分析,得出位置辨識收斂成功的限制條件,進而提出改進的初始位置辨識算法。仿真分析驗證了該文理論分析的正確性和所提方法的有效性。
表貼式永磁同步電機 無位置傳感器 轉子初始位置辨識 高頻脈振電壓 收斂域
0 引言
永磁同步電機矢量控制調速系統由于其具有結構簡單、尺寸小、功率密度高、動態性能好等優點,廣泛應用于風力發電、船舶電力推進等領域。在永磁同步電機矢量控制啟動過程中,轉子初始位置信號通常由編碼器等傳感器提供,這些機械裝置會使系統的可靠性降低。轉子初始位置的準確程度直接決定電機啟動轉矩的大小,甚至不能正常啟動,因此,基于無位置傳感器的永磁同步電機轉子初始位置的辨識備受重視。
目前大多利用電機的凸極效應得到電機的初始位置信息,具體是指通過注入電壓/電流信號,根據軸電感的差異,從電流/電壓的響應中提取位置信息。文獻[1]和[2]利用磁路的飽和凸極效應,分析電感隨注入電壓脈沖信號、轉子位置之間的變化,通過比較響應電流的峰值獲得轉子初始位置,缺點是對檢測硬件電路精度要求較高,并且沒有分析磁滯效應等因素對電流峰值的影響。有的文獻比較分析了旋轉高頻電壓注入和脈振高頻電壓注入兩種方法的位置辨識原理,并給出具體應用時需要考慮的因素。采用高頻脈振電壓信號注入時,有的文獻引入動態電感的概念,將高頻信號注入應用在凸極率很小的表貼式永磁同步電機(SPMSM)。通過跟蹤電機的凸極效應,已經有很多永磁同步電機無位置傳感器初始位置辨識策略,但初始位置辨識有時收斂不成功的根本原因卻很少被研究分析。
本文以高頻脈振電壓注入為例,針對SPMSM首先分析因磁路飽和引起的電機凸極效應,并根據高頻激勵下的永磁同步電機模型得到轉子初始位置的辨識算法,進而運用穩定性判定依據得出初始位置辨識收斂成功的條件,進而提出改進的初始位置辨識算法,仿真分析驗證了該文所提方法的有效性。
1 永磁同步電機高頻激勵模型
為了最大限度的利用鐵磁材料,通常將SPMSM空載時直軸磁路的工作點設計在曲線的拐點處。因而,向直軸通入正電流id時,鐵磁材料工作點進入飽和區,直軸電感減小;交軸磁路工作點通常位于不易飽和的原點,交軸電感恒定。通過類似分析,可得Ld< Ld=Lq=Lq。
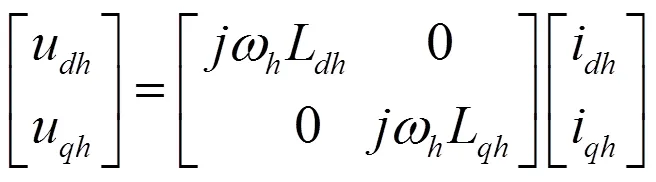
考慮到電流PI調節器帶寬的設置、電壓傳感器成本問題和輸出轉矩波動的要求,選擇將高頻脈振電壓信號注入d軸,然后根據電流反饋信號求出位置信息。
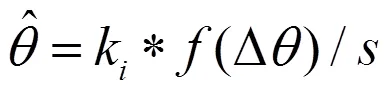
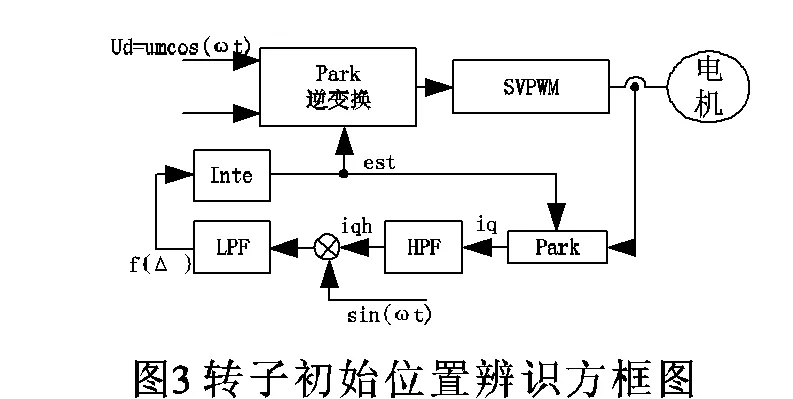
2 初始位置提取
在進行位置辨識時,電機參數和高頻注入的信號不再變化,因而可以認為信號的幅值與位置辨識差正相關。通過旋轉坐標變換或者低通濾波器可提取出幅值信息。將q軸高頻電流和正弦同相位信號相乘后,經過低通濾波器,可以很好的濾除產生的二倍頻余弦信號,還能夠有效的濾除因SVPWM調制產生的載波頻率電流。
其中
下面對上面提出的轉子初始位置辨識策略穩定性和穩定域進行分析。
初始位置辨識時,轉子處于靜止狀態,則

將辨識位置差作為狀態變量,可得狀態方程:
3 d軸正方向的判斷和補償
從初始位置辨識穩定性分析可知此方法只能估計出d軸所在的位置,但并不能判斷出NS極,所以上面分析中出現的情況。因此,有必要尋找出一種能夠判斷出NS極的方法,對辨識的轉子位置判斷是否需要補償p角度。
本文采用注入幅值恒定、相位分別為qest和qest+p的兩個脈沖電壓信號,通過分析電流的響應來判斷d軸的正向。注入脈沖電壓信號時,電機繞組狀態類似于一階RL阻感負載的零狀態響應。
響應可以用下面的公式表示。
從上可知,電流穩態時電流保持為/。電感大小會影響電流響應速度和峰值大小。前面已經分析Ld<Ld,電感較小時,電流響應比較快,峰值較大。電流峰值的測量對采樣硬件和采樣頻率有很高的要求,本文選擇比較電流從穩態值衰減到零所用時間的大小來進行直軸的判斷,此時的電流衰減公式如下所示。
從上面的公式可以看出,電感比較小時電流的衰減較快,因而有,根據時間比較的結果可以確定位置是否需要補償。
4 仿真和分析
為驗證本文所提方法的有效性,對一臺表貼式永磁同步電機進行了仿真。該電機額定功率87 kW,額定線電壓268 V,額定電流201.5A,交直軸電感均為367.5 μH,定子電樞繞組電阻為0.1 Ω,額定轉速為810 r/min,極數為10,相數為3,采樣頻率設定為10 kHz,注入高頻信號的頻率選擇500 Hz,高頻信號幅值為40 V,位置辨識初始給定為0,d軸正方向判斷施加的電壓為4V。
高頻脈振電壓信號幅值和頻率的選擇對于位置辨識算法很重要。若電壓幅值選擇不當,會出現電機抖動、收斂時間過長等問題;若頻率選擇不當,則會出現采樣信號混疊、高頻激勵模型偏差較大等問題。初始位置辨識時,同時需要注意電感殘留能量、磁滯效應對辨識產生的影響。
轉子初始位置給定為5p/6時,可得仿真波形圖如圖4所示。圖(a)為判斷轉子直軸正方向判斷時的電流響應圖,從中可以看出,第一次電流衰減到零時正為25 ms,第二次電流衰減到零時負為19ms,由于正>負,因而轉子初始辨識位置需要補償p角度;圖(b)為整個階段轉子位置辨識的波形圖。
轉子初始位置給定為p/2時的轉子位置估計波形如圖5所示。從圖可知,結合位置辨識輸出初始值的改變和軸正方向的判斷,可以得到轉子的真實位置。
在(0,2p)范圍內取25個點進行初始位置辨識,估計位置和真實位置的差如圖6所示。從圖可知,當轉子位置為π/2的整數倍時,辨識誤差較大;位置辨識的最大誤差為0.01/rad。
5 結論
本文針對表貼式永磁同步電機提出一種基于高頻脈振電壓信號注入的轉子初始位置的辨識策略。在分析同步電機高頻激勵模型的基礎上,建立高頻信號和位置辨識值之間的關系,并對所提辨識策略的穩定域進行了分析。分析結果表明,本辨識策略魯棒性較強,不依賴電機的準確參數,并且可以很好的應用到內嵌式等結構性凸極的永磁同步電機。仿真分析表明此方法有良好的辨識精度,最大角度偏差僅為0.6°,可以滿足閉環啟動的要求。
[1] 梁艷,李永東.無傳感器永磁同步電機矢量控制中轉子初始位置的估算方法[J].電工技術,2003,22(2): 10-13.
[2] Shin Nakashima, Yuya Inagaki, Ichiro Miki. Sensor- less initial rotor position estimation of surface permanent magnet synchronous motor[J]. IEEE Trans. on Industry Application, 2000, 36(6): 1598 -1603.
Intital Rotor Position Estimation of Permanent Magnet Synchronous Motor Based on High Frequency Pulsating Voltage Injection
He Zhongxiang, Li Mingyong,Zhu Lei
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
Based on high frequency pulsating voltage injection, the initial rotor position estimation algorithm maybe result in fail on convergence, which influences the starting torque seriously. To solve the problem, the mathematical model of surface permanent magnet synchronous motor injected by high frequency signal is presented. By analyzing the convergence of the initial position estimation algorithm concretely, the restrictive condition of convergence is given, and then an improved estimation algorithm is proposed. The simulation results show the validity of the theoretical analysis and the feasibility of the estimation strategy.
TM351
A
1003-4862(2016)03-0020-04
2015-11-09作者簡介:何忠祥(1991-),男,碩士。研究方向:電機工程。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06