魚雷動態打靶測量關鍵技術研究
2016-10-13 11:39:28焦安龍宋敬利
船電技術 2016年9期
焦安龍,宋敬利
?
魚雷動態打靶測量關鍵技術研究
焦安龍,宋敬利
(91439部隊,遼寧大連 116041)
魚雷動態打靶試驗是檢驗魚雷武器毀傷能力的最直接、最有效的方法,魚雷動態打靶試驗中由于魚雷爆炸對靶船產生的劇烈沖擊會造成靶船的嚴重毀傷甚至沉沒,因此魚雷動態打靶試驗中對靶船的沖擊測量需要考慮測量設備沖擊防護、遠程控制、數據的可靠回收等諸多技術問題,通過對魚雷動態打靶試驗測量工作所面臨的技術問題的難點分析,給出了相應的解決方法,可以作為魚雷動態打靶試驗測量工作實施的參考。
魚雷 動態打靶 測量
0 引言
測量魚雷動態爆炸對艦船的毀傷程度,對于定量評估水中兵器的毀傷效能至關重要。以美國為首的西方國家十分重視水中兵器在水中爆炸后的毀傷機理、測試、評估和艦船的抗爆抗沖擊研究。美國一直堅持首制艦進行實船水中爆炸驗收試驗。美國海軍抗沖擊規范MIL-S-901D規定,凡小于181噸的艦載設備必須經過水中爆炸抗沖擊考核試驗,大于181噸設備必須經過沖擊計算考核[1]。
魚雷對艦艇的毀傷屬于接觸或近場爆炸毀傷,我國關于魚雷對水面艦艇的毀傷機理已經開展過充分的理論研究[2],以前由于受到測量手段的限制在魚雷實航打靶試驗中都沒有對爆炸毀傷效應進行定量測量分析,一般只是宏觀看一下爆炸毀傷效果,對魚雷爆炸毀傷的定量測量目前都是通過陸上試驗進行,但由于空氣中爆炸與水中爆炸有著本質的差別,陸爆方法不能對魚雷爆炸毀傷效能指標作出科學判斷[3,4]。要想在接近實戰條件下檢驗魚雷攻擊目標艦時的毀傷效應必須通過動態打靶方式,并且要對靶船的結構強度、沖擊響應等參數進行測量。通過對魚雷攻擊水面艦艇的毀傷效應測量關鍵技術研究和魚雷動態打靶測量工作的難點問題分析,給出測量設備在劇烈沖擊作用下的防護方法、測量設備的遠程控制方法,數據的可靠回收方法以及動態炸點位置測量的傳感器優化布設及炸點位置的解算方法等,可以作為魚雷動態打靶測量工作的實施的參考。
1魚雷動態打靶測量工作的難點分析
魚雷動態打靶試驗中魚雷處于航行狀態,且魚雷攻擊艦船的位置不確定,因此對艦船的毀傷效應存在很多不確定因素,這給測量工作帶來了諸多困難。首先要考慮測量設備的安全問題,必須找到一個相對安全的位置安裝測量設備,同時需要對測量設備采取必要的緩沖措施,確保設備在劇烈的沖擊作用下能夠可靠工作并有效進行數據采集。動態打靶試驗很有可能造成靶船沉沒,因此必須在靶船沉沒之前將采集的數據轉錄出來,動態打靶試驗的危險性極大,在被試靶船附近不可能有其它艦船停留,因此需要遠距離對靶船狀態進行監測,并將靶船的狀態實時傳送到控制端,當控制端檢測到靶船即將沉沒時能夠實現測量設備與靶船的分離,確保測量設備安全回收。為了準確分析測量數據還需要知道爆炸瞬間魚雷相對靶船的位置,因此必須采取合適的定位測量手段和解算方法對魚雷進行精確定位。
2測量設備的安裝布置及遠程控制方法
測量設備要布置在相對安全的地方,因此需要對魚雷動態打靶時靶船的沖擊響應進行事先評估,首先要對魚雷和被試艦分別進行建模,并針對魚雷在典型部位的接觸和近場爆炸開展仿真計算,通過仿真計算得出不同工況下船體結構和重要艦載設備及武器裝備的沖擊響應情況和應力在結構中的傳播規律。
由于魚雷動態攻擊靶船屬于近場或接觸爆炸,會使目標艦產生大的變形或破口,有限元方法不再適用,采用光滑粒子流體動力學方法可以很好地解決近場和接觸爆炸毀傷的沖擊波載荷問題。氣泡脈動載荷采用邊界元法進行求解,氣泡射流載荷采用簡化計算方法,將射流簡化為高速運動流體,通過非線性雙漸進法計算氣泡射流載荷對船體的毀傷作用。結果對被試艦的建模采用全船建模方式,對結構復雜的艦載設備及重要武器裝備采用等效質量方法進行建模。對魚雷爆炸載荷作用下被試艦沖擊響應進行仿真計算得出全船沖擊響應及重要裝備的沖擊輸入輸出參數,考慮到魚雷動態打靶炸點的隨機性,仿真計算應考慮魚雷在不同攻擊位置(船艏、船舯、船艉)、不同攻擊角度(船底、舷側)爆炸進行。通過仿真計算找出被試艦沖擊相對較小的位置對測量設備進行安裝布置。
采用無線數傳電臺,在測量船和靶船之間通過自動尋址方式進行無線組網,由測量船上的控制端通過特定的指令對采集設備進行采集控制,在測量船上通過無線網絡對靶船上的采集設備進行測量參數設置、采集設置及觸發設置,測量設備的觸發采用傳感器信號觸發和遠程手動觸發雙備份的方式以確保測量設備可靠觸發采集[5]。對于魚雷實航爆炸威力測量試驗中,考慮到魚雷炸點的不確定性,自由場壓力傳感器信號強弱差別較大,如果預先指定某一通道為觸發通道,會給系統帶來很大的不確定性,因此需要對各個測量通道采取并聯的方法,當任意一個通道達到觸發閾值時即可觸發測量設備進行數據采集。
3測量設備的防護方法
魚雷爆炸時,強大的沖擊波會引起靶船的劇烈振動,為了確保靶船上各測試儀器的正常工作,必須將測試儀器安放在緩沖平臺上。緩沖平臺可以采取空氣彈簧緩沖器,也可以采取氣液緩沖器,但是在使用前需要對緩沖器的緩沖效果進行沖擊測試,合理調整空氣彈簧內的氣壓以達到最佳緩沖效果,對于氣液緩沖器需要合理調整氣液比例,根據承載設備的重量進行充放氣操作。
測量設備屬于電子設備,不能接觸海水,當靶船沉沒時必須保證測量設備的可靠回收,因此必須將測量設備安裝在具有防水功能的密封艙內,密封艙內要設置測量設備的供電電源,測量設備與傳感器相連的電纜要通過水密件穿過密封艙體。密封艙通過爆炸螺栓固定在緩沖平臺上,當靶船即將沉沒時,可通過遠程控制指令迅速切斷密封艙與外部相聯的電纜以及密封裝置與緩沖平臺之間的連接,使密封艙浮于海面上,便于事后打撈,把試驗損失降低到最小限度。
4靶船狀態的監測方法
為了準確判定是否需要對密封裝置進行解脫,需要檢測底部船艙是否進水及進水深度,判斷是否具有沉船的可能,并進一步決定是否發出解脫指令。根據海水電導率較高,具有一定導流能力這一事實設計海水接觸傳感器,多只傳感器置于靶船不同位置,遠程控制端通過采集傳感器的導通狀態來判斷靶船的傾覆狀態。將多個液位開關出來的開關量信號分別通過光電隔離,進入單片機,經過單片機的處理后,由RS232收發器轉化為RS232信號通過電纜與PC機通信,并由局域網發送至主控計算機。電路示意如圖1所示。
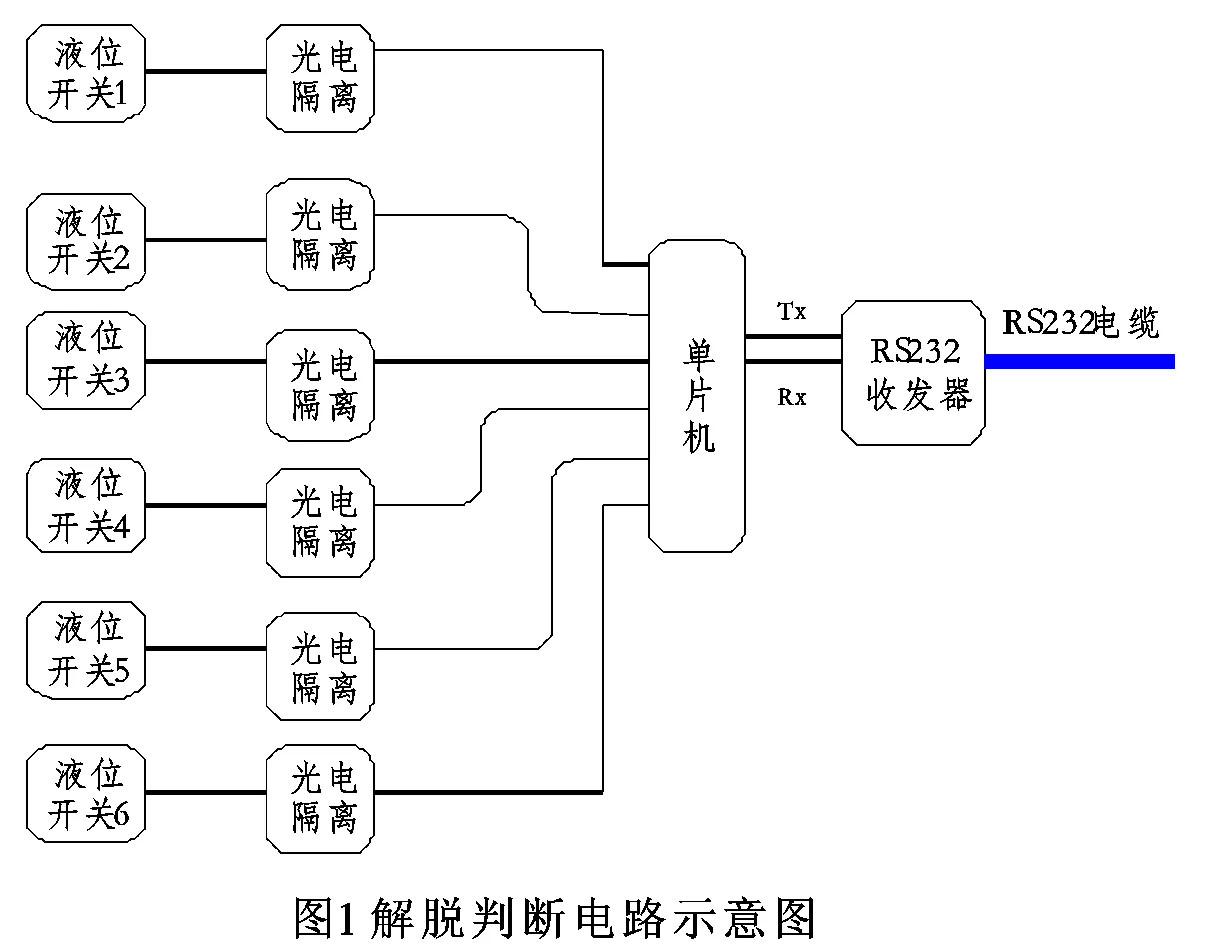
傳感器將觸水信號轉換為電信號,0為默認值,1為浸入海水導通狀態,按默認編號次序將多傳感器的導通狀態轉為多位編碼。該數據字在總線控制器查詢后反饋,經測控局域網發送至遙控端解碼顯示,由人工判斷傾覆狀態。
5測量數據轉錄方法
要將測量數據快速轉錄出來需要采用傳輸速率較高的傳輸設備,可以考慮采用光纖或無線方式進行數據轉錄,但無線傳輸方式由于易受到周圍電磁環境干擾,且傳輸速率與距離有很大關系,而沖擊測量由于采樣率較高,采集的數據量較大,很難在短時間內將數據安全轉錄出來,而光纖傳輸技術傳輸速率高,數據傳輸更加安全可靠,因此考慮采用光纖進行數據傳輸。由于實航打靶試驗時控制船離靶船較遠,若在控制船和靶船之間拉一條光纜海上實施難度較大,因此考慮在靶船附近布設一個用于承載轉錄裝置的浮體,將光纖從靶船拉至浮體上。
位于靶船上的數據采集設備采集到的數據通過交換機融合在一起傳輸給光端機,然后通過光纖傳輸到數據轉存浮體上的光端機,數據轉存浮體上的光端機接收數據并傳送給千兆交換機,最后千兆交換器將數據輸出給數據轉存計算機。由于數據采集設備可能有多個,因此需要對每個采集設備分配一個IP地址,數據轉存與控制系統配置一個IP地址,雙方進行通信時通過IP地址就可以區分數據的信源和信宿,解決數據沖突的問題。
6炸點定位測量的測點優化布置及解算方法
在魚雷實航打靶試驗中,無法采用GPS和水聲定位方法對動態炸點進行定位。因此考慮采用對壓力測量數據進行解算獲得爆源相對靶船位置的方法[6,7]。由于魚雷實航攻擊目標艦的炸點隨機,傳感器布設位置的選擇很難,在目標艦上布設壓力傳感器時應盡量增加布設數量以獲取更準確的爆源位置,但是受測量規模限制傳感器不宜布設太多,在測點數量有限的情況下需要對傳感器的安裝部位進行優化設計,以確保動態炸點的定位精度,優化設計要充分考慮動態炸點位置的隨機性,針對目標艦的結構特點,采用自由場壓力和船體壁壓兩種參數作為爆源定位的原始依據,首先確定在目標艦上建立三維坐標系,然后給定一個爆源的大概初始相對于靶船坐標系的坐標,以此坐標為中心在三維空間進行網格劃分,計算各分割區域到達各測點位置的時間差并跟爆炸沖擊波信號達到各測點的實際時間差做比較,找出均方差最小的區域并繼續對該區域進行網格劃分,繼續采用上述方法進行解算,直到均方差值小于事先設定的閾值計算結束。通過計算最終得到的網格坐標即為爆源位置坐標。
7結束語
魚雷動態打靶試驗的開展面臨諸多技術難題,通過對魚雷動態打靶試驗的難點問題進行分析,嘗試給出相應的解決辦法,但在具體操作時還需要考慮很多細節問題,文章在這方面進行了初步探索,在具體實施時還需根據具體情況采取相應的措施。
參考文獻:
[1] 梁卓中,陳立賢.應用美規 MIL-STD-901D 標準
水中爆震平臺進船艦重裝備之抗震能分析[J].科學與工程技術, 2009,5(2) :35-50.
[2] 劉建湖.艦船非接觸水下爆炸動力學的理論與應用.中國船舶科學研究中心博士論文,2002.
[3] 汪玉, 華宏星. 艦船現代沖擊理論及應用[M].北京: 科學出版社, 2005.
[4] 蔣國巖,金輝,李兵,等.水下爆炸研究現狀及發展方向展望.科技導報, 2009. 27(9):87-91.
[5] 李洪濤,皇甫堪,閆吉杰.基于無線數據傳輸的水下爆炸壓力遙測系統.測控技術與設備,2003,29(1):28-30.
[6] 劉方正,祁建清,戚亞拯.高精度四站無源時差定位方法及精度分析[J].火力與指揮控制,2012,37(9):105-108.
[7] 易云清,徐漢林,王化.時差定位的傳感器位置分布研究.計算機應用[J],2009,29(12):58-62.
Research on Key Techniques of Dynamic Measurement for Torpedo Shooting
Jiao Anlong , Song Jingli
(Unit 91439 of PLA, DaLian 116041, Liaoning, China)
TJ630
A
1003-4862(2016)09-0028-03
2016-04-15
焦安龍(1974-),男,工程師。研究方向:魚雷技術。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
