基于FPGA的磁懸浮軸承飛輪控制系統(tǒng)設(shè)計
2016-10-14 05:27:25劉鵬遠李建春王曉瑜肖躍華曹揚
導航與控制 2016年1期
劉鵬遠,李建春,王曉瑜,肖躍華,曹揚
(北京航天控制儀器研究所,北京100039)
?
基于FPGA的磁懸浮軸承飛輪控制系統(tǒng)設(shè)計
劉鵬遠,李建春,王曉瑜,肖躍華,曹揚
(北京航天控制儀器研究所,北京100039)
針對五自由度永磁偏置磁軸承飛輪,分析其結(jié)構(gòu)參數(shù)及控制原理,設(shè)計了磁飛輪通用型電控系統(tǒng)。介紹了以FPGA為核心的控制系統(tǒng)構(gòu)成,并闡述了控制器的設(shè)計策略,針對飛輪數(shù)據(jù)處理設(shè)計了一種通用型矩陣運算器。最終完成靜態(tài)懸浮及低速旋轉(zhuǎn)實驗。
磁懸浮飛輪;FPGA;不完全微分PID;矩陣運算器
0 引言
磁懸浮軸承飛輪是空間衛(wèi)星實現(xiàn)高精度姿態(tài)控制常用的執(zhí)行機構(gòu)。磁懸浮軸承技術(shù)是保障飛輪高效工作的關(guān)鍵,它利用電磁力將轉(zhuǎn)子懸浮,使定、轉(zhuǎn)子之間無機械接觸,因此具有無磨損、無需潤滑、使用壽命長、功耗低等優(yōu)點。另外,磁懸浮軸承飛輪在高精度機床、飛輪儲能電池、新能源汽車等方面都有越來越廣泛的應(yīng)用[1]。
磁軸承飛輪技術(shù)的關(guān)鍵在于磁軸承支撐技術(shù),我國在磁軸承結(jié)構(gòu)設(shè)計、控制策略等方面,都取得了長足的進展。
文獻[2]提出一種針對飛輪控制的雙滑膜變結(jié)構(gòu)控制器,實驗驗證該控制器具有超調(diào)小、穩(wěn)態(tài)誤差小、響應(yīng)速度快等優(yōu)點;文獻[3]提出章動失穩(wěn)的主要原因是系統(tǒng)的相位滯后引起,進動失穩(wěn)主要因為積分控制項對系統(tǒng)負阻尼作用引起,并給出了基于PID控制的解決方案;文獻[4]實現(xiàn)了以DSP為核心的控制力矩陀螺控制器;文獻[5]實現(xiàn)了給予FPGA的磁懸浮飛輪控制器的一體化設(shè)計;文獻[6]介紹了磁懸浮系統(tǒng)神經(jīng)網(wǎng)絡(luò)建模與控制,并分析了磁懸浮軸承系統(tǒng)不確定性因素,采用開源軟件實現(xiàn)了主動磁軸承的數(shù)字控制;文獻[7]采用遺傳算法實現(xiàn)了磁懸浮軸承控制系統(tǒng)的設(shè)計;文獻[8]采用矩陣變換的方法實現(xiàn)飛輪電池能量轉(zhuǎn)換及控制;文獻[9]介紹了主動磁軸承抑制機械抖動的方法;文獻[10]對主動磁軸承在多種控制模式下的魯棒穩(wěn)定性做了詳細探討;文獻[11]利用自適應(yīng)魯棒控制,成功對柔性轉(zhuǎn)子磁軸承抖動進行了抑制。
本文以現(xiàn)有永磁偏置磁軸承飛輪為研究對象,分析其結(jié)構(gòu)參數(shù)及控制原理,分析了五自由度懸浮數(shù)學模型;設(shè)計了三電平PWM開關(guān)功率放大器和以FPGA為核心的控制器,實現(xiàn)了浮點PID算法。最終完成飛輪五自由度靜態(tài)及低速旋轉(zhuǎn)懸浮實驗,并根據(jù)實驗修正控制算法,最終獲得較理想的控制效果。
1 系統(tǒng)模型
五自由度飛輪永磁偏置磁軸承控制系統(tǒng)結(jié)構(gòu)如圖1所示。系統(tǒng)由軸向磁軸承、徑向磁軸承、電渦流位置傳感器、信號調(diào)理電路、數(shù)字控制器、功率放大器組成。
飛輪系統(tǒng)中,每一組磁軸承以都差動方式提供回復力。軸向傳感器單向工作,徑向傳感器差動工作。傳感器實時監(jiān)測飛輪的位置信號,并將其轉(zhuǎn)化為電壓信號。電壓信號經(jīng)調(diào)理電路處理和AD轉(zhuǎn)換,作為反饋信號輸入數(shù)字控制器,其中Z方向信號經(jīng)過解算(4-3變換),由四個位置信息變成一個轉(zhuǎn)子幾何中心位置和繞X軸、Y軸轉(zhuǎn)動的兩個角度信息。反饋信號與系統(tǒng)給定比較,偏差作為五自由度控制器輸入。輸出中,Z方向位置與繞X軸、Y軸的角度信息再經(jīng)3-4變換成為相應(yīng)磁軸承的控制信號。控制信號經(jīng)FPGA處理,產(chǎn)生24路PWM驅(qū)動信號,經(jīng)開關(guān)功放,輸出三電平PWM電壓信號作用于磁軸承繞組線圈。線圈電流產(chǎn)生的磁場與永磁體磁場共同作用,產(chǎn)生回復力,使飛輪回到平衡位置,實現(xiàn)懸浮。磁懸浮軸承為位置-電流雙閉環(huán)系統(tǒng),采用電渦流傳感器檢測位置,霍爾傳感器檢測電流。
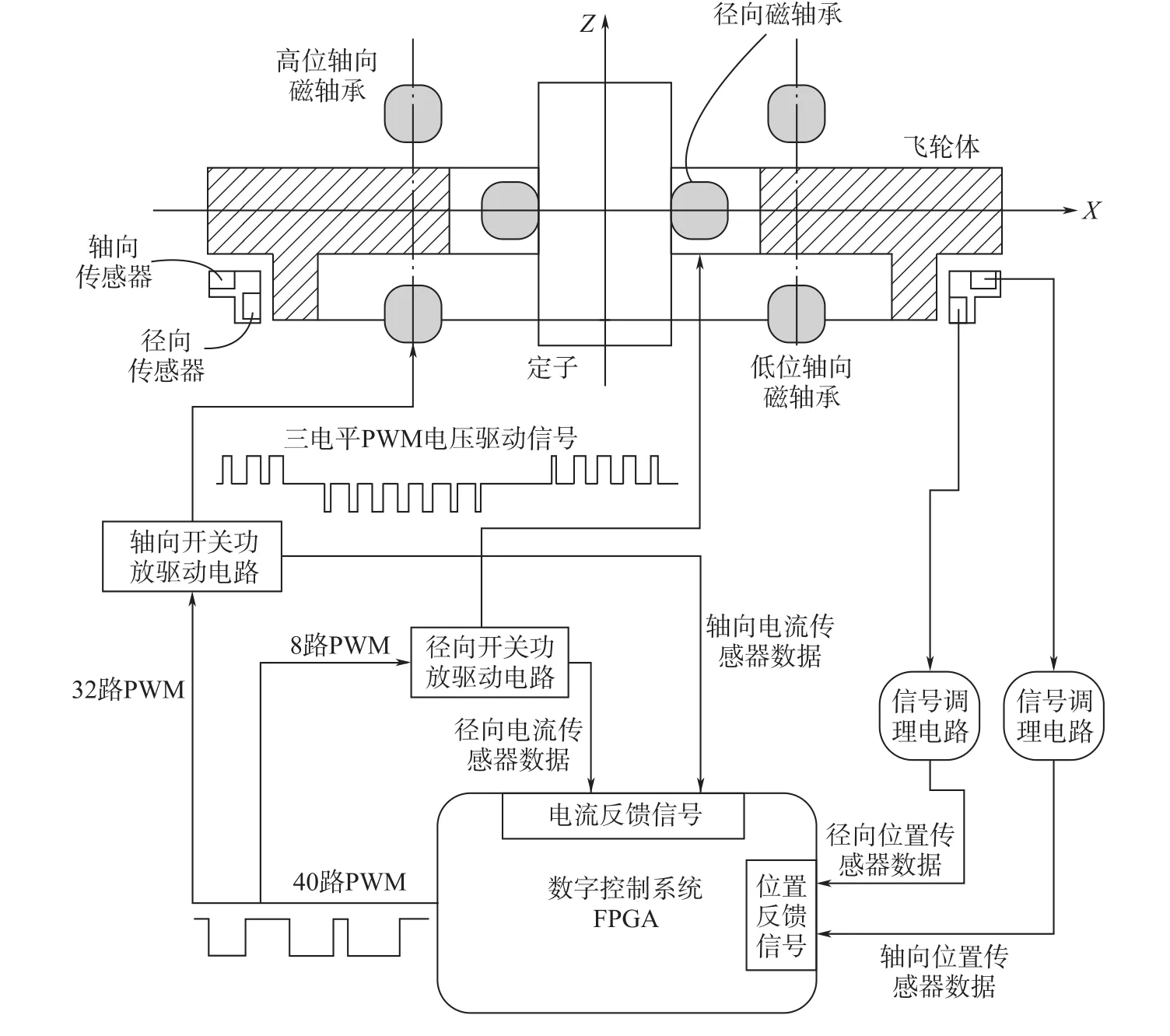
圖1 五自由度磁懸浮飛輪系統(tǒng)結(jié)構(gòu)Fig.1Structure of magnetic levitation flywheel system with five degrees of freedom
飛輪轉(zhuǎn)速可達到3000r/min,在此條件下,轉(zhuǎn)子被視為剛性轉(zhuǎn)子,在工作范圍內(nèi),軸承提供的電磁力與控制電流,轉(zhuǎn)子位置有近似線性的關(guān)系:

其中,F(xiàn)δ為電磁力,Kδ為位置剛度,Ki為電流剛度,δ為轉(zhuǎn)子位置,iδ為控制電流。
根據(jù)飛輪結(jié)構(gòu),當不計外力時,由牛頓第二定律可推導得系統(tǒng)五自由度運動微分方程為:
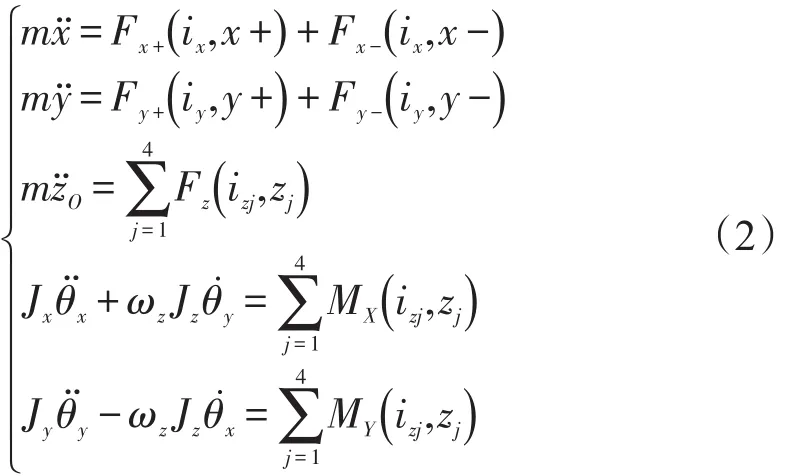
其中,m為轉(zhuǎn)子質(zhì)量,Jx、Jy、Jz為轉(zhuǎn)子繞X軸、Y軸、Z軸的轉(zhuǎn)動慣量,x、y、zO為轉(zhuǎn)子在X、Y、Z方向的平動位移,θx、θy為轉(zhuǎn)子繞X軸、Y軸的轉(zhuǎn)動角度,F(xiàn)x+、Fx-、Fy+、Fy-、Fz為磁軸承在X、Y、Z方向的平動回復力,MX、MY為磁軸承施加在X、Y方向的力矩,ωz為電機轉(zhuǎn)速。由方程可知,轉(zhuǎn)子平動自由度間不存在耦合,繞X軸、Y軸轉(zhuǎn)動存在耦合。
對于徑向平動自由度,以X軸為例,當不計外力時,軸向單自由度平動傳遞函數(shù)為:

對系統(tǒng)采用閉環(huán)控制,以轉(zhuǎn)子位置信號作為反饋量。軸向單自由度閉環(huán)系統(tǒng)框圖如圖2所示。
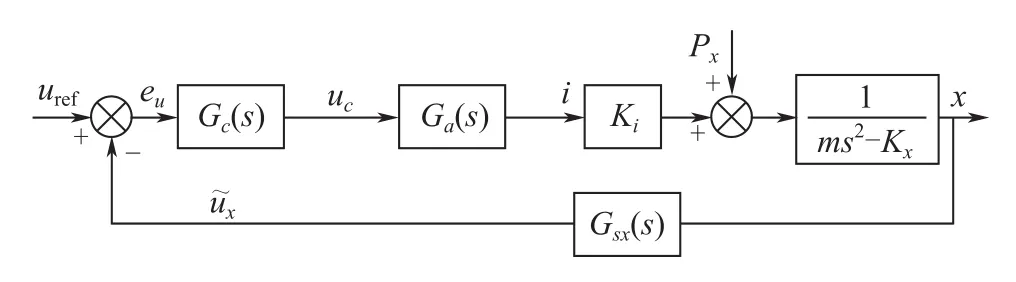
圖2 單自由度閉環(huán)控制系統(tǒng)框圖Fig.2Block diagram of closed-loop control system for single degree of freedom
則系統(tǒng)閉環(huán)傳遞函數(shù)為:

其中,Gc(s)為控制器傳遞函數(shù),在傳統(tǒng)控制方法中一般為PID控制器;Ga(s)為電流內(nèi)環(huán)傳遞函數(shù),正常工作時為常數(shù)Ka;Gsx(s)為位移傳感器傳遞函數(shù),正常工作時亦為常數(shù),可設(shè)其為Ksx。
此時系統(tǒng)閉環(huán)傳遞函數(shù)為:

根據(jù)閉環(huán)系統(tǒng)的穩(wěn)定勞斯判據(jù),對于二階系統(tǒng),系統(tǒng)穩(wěn)定的充分必要條件為閉環(huán)特征多項式系數(shù)都大于零,因此控制器必須至少含有微分環(huán)節(jié)及慣性環(huán)節(jié),假設(shè)控制器為PD控制,
Gc(s)=Kcp+Kcds,則系統(tǒng)閉環(huán)傳函為:

系統(tǒng)穩(wěn)定需滿足:KiKsxKaKcp-Kx>0。
對于軸向運動(包括軸向平動、徑向轉(zhuǎn)動),控制系統(tǒng)框圖如圖3所示。
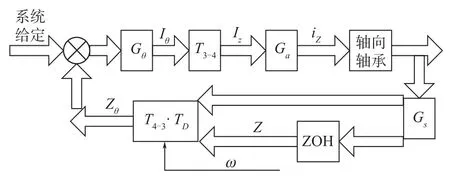
圖3 軸向運動控制系統(tǒng)框圖Fig.3Block diagram of axial motion control system
在軸向運動控制中,軸向傳感器所測位置參數(shù)經(jīng)4-3變換,轉(zhuǎn)換為自由度,經(jīng)控制器運算后再經(jīng)3-4變換得出各軸承線圈中的控制電流。其中,Gθ為軸向運動解耦控制器,Iθ=[IZoIθxIθy]'為控制器輸出,iz=[iz1iz2iz3iz4]'為線圈控制電流,Zθ=[zOθxθyz?Oθ?xθ?y]'為解算后軸向運動各自由度數(shù)據(jù)。Z=[z1(k)z2(k)z3(k)z4(k)z1(k-1)z2(k-1)z3(k-1)z4(k-1)]'為位置傳感器采集數(shù)據(jù)。3-4變換矩陣,4-3變換及解耦矩陣,數(shù)據(jù)處理陣如下:
式中,t為采樣頻率。
2 控制器結(jié)構(gòu)及算法實現(xiàn)
2.1控制系統(tǒng)整體結(jié)構(gòu)
飛輪控制系統(tǒng)由以FPGA為核心的數(shù)字控制器、功放電路和傳感器電路構(gòu)成。鑒于磁懸浮軸承控制系統(tǒng)組成復雜,當某一路功放電路出現(xiàn)故障時,會使整個系統(tǒng)工作受到影響。因此將控制系統(tǒng)電路部分劃分為控制板、功放板和信號采集板三部分,并做成可插拔式板卡。
FPGA程序主要包括AD采集、串口通信、數(shù)據(jù)處理、數(shù)字控制、PWM控制信號生成、頂層邏輯及時序分配等幾個主要模塊,如圖4所示。在軟件中,利用芯片內(nèi)部雙端口RAM作為數(shù)據(jù)傳遞媒介,將各功能模塊相互隔離,使每個功能模塊都可以獨立工作。這種設(shè)計方式可以極大程度上減少數(shù)字電路中的競爭冒險和時序沖突,易于擴展和協(xié)同開發(fā)。
2.2AD采集與數(shù)據(jù)格式
本系統(tǒng)選用的AD轉(zhuǎn)換芯片為AD7656,它是由ADI公司采用iCMOS工藝生產(chǎn)的,高集成度、6通道、16bit逐次逼近型ADC。其單通道采樣率可達到250kbit/s,并且內(nèi)置低噪聲寬帶寬采樣保持放大器,能夠處理輸入頻率達4.5MHz的信號。
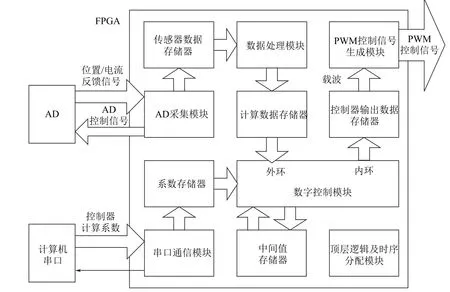
圖4 FPGA程序主要結(jié)構(gòu)Fig.4Main structure of FPGA
利用二進制數(shù)直接計算有諸多不便,在加/減法操作后數(shù)據(jù)都要做溢出保護處理,在乘法操作后數(shù)據(jù)都需要做截短處理,這些處理都降低了計算精度,影響控制系統(tǒng)特性。因此,在數(shù)據(jù)處理和數(shù)字控制器中采用單精度浮點數(shù)。16位二進制定點數(shù)到單精度浮點數(shù)的轉(zhuǎn)換利用ALTERA提供的IP核ALTFP_CONVERT來實現(xiàn)。
2.3數(shù)據(jù)處理
數(shù)據(jù)處理主要包括3-4變換、4-3變換及解耦、濾波等。數(shù)據(jù)處理的核心在于利用實現(xiàn)矩陣算法。浮點乘加運算需要消耗大量邏輯資源,利用ALTERA浮點乘法與加法IP核,集合流水線,實現(xiàn)了一種矩陣運算器,可以很方便地實現(xiàn)矩陣與矩陣乘、矩陣與列向量乘、矩陣與常數(shù)乘等運算。可以利用最少的邏輯資源和較少的時鐘周期實現(xiàn)極大的運算量。
實現(xiàn)浮點乘法器需要5個時鐘周期,加法需要8個時鐘周期。以矩陣與列向量乘為例,運算器結(jié)構(gòu)如圖5所示,乘法器的輸出直接作為加法器的一個輸入,加法器的輸出作為自身的另一個輸入。系數(shù)矩陣保存在一個8×8RAM中,傳感器AD采集數(shù)據(jù)保存在1×8RAM中。運算開始前,運算器中所有寄存器清零,運算開始后每個時鐘周期從系數(shù)矩陣讀出一組乘數(shù)(mdata1),每8個周期從數(shù)據(jù)矩陣中讀出一組乘數(shù)(mdata2),5個周期后,乘法器開始輸出有效結(jié)果,13個周期后,加法器開始輸出有效結(jié)果,該結(jié)果與乘法器輸出作和,69個周期后,即可完成矩陣與列向量乘運算,并把結(jié)果保存在另一個1×8RAM中。
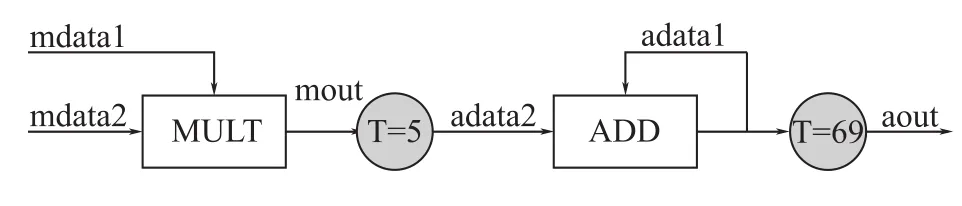
圖5 矩陣運算器示意圖Fig.5Diagrammatic sketch for matrix computation
2.4數(shù)字控制器設(shè)計
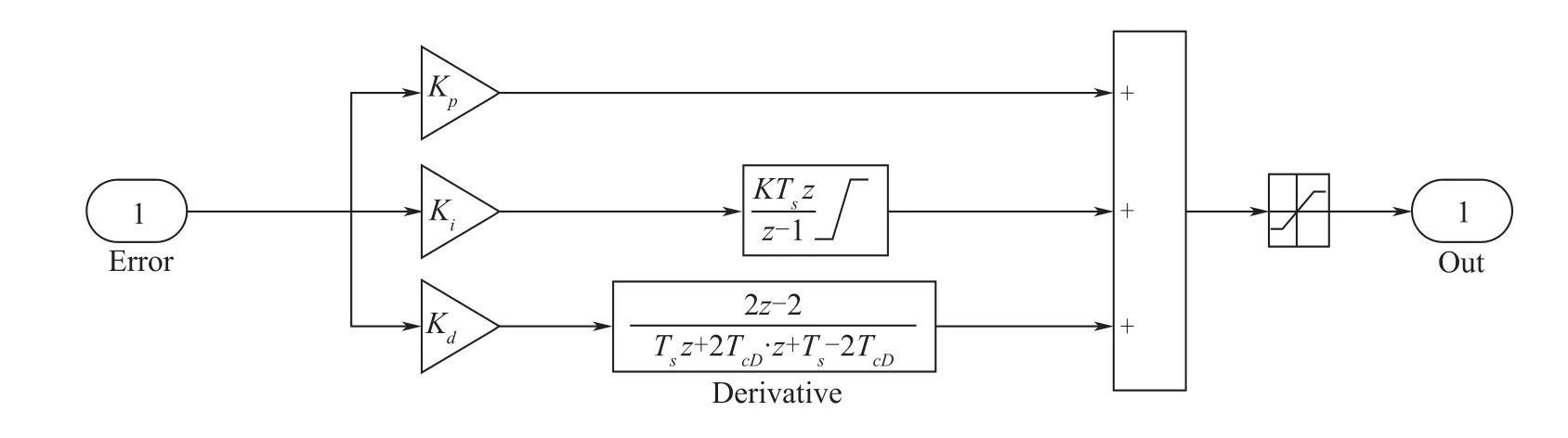
圖6 數(shù)字式PID控制器結(jié)構(gòu)Fig.6Structure for digitized PID controller
PID控制器脈沖響應(yīng)傳遞函數(shù)為:

離散化后的比例通道輸出:

積分通道輸出:

微分通道輸出:

控制器輸出為:

PID算法實現(xiàn)過程如圖7所示,運算中每一個步驟都占用8個時鐘周期。
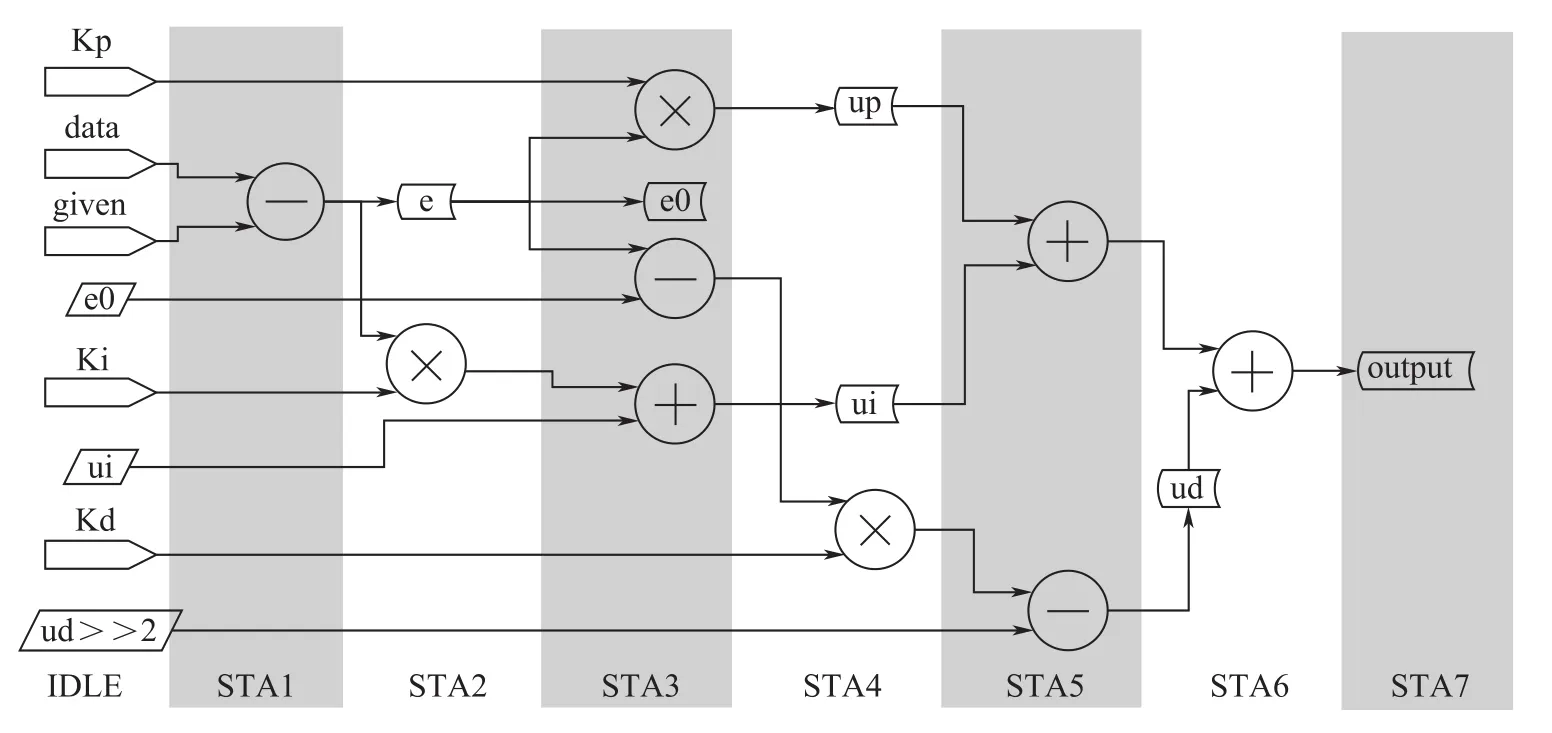
圖7 PID控制算法流程Fig.7Flow path for PID algorithm
3 實驗
將程序下載至FPGA完成起浮實驗。圖8中,X、Y、Z1、Z2、Z3、Z4分別為各軸承對應(yīng)位置傳感器輸出波形。電路中,徑向位置傳感器放大倍數(shù)為10mV/μm,軸向傳感器放大倍數(shù)為7mV/μm。
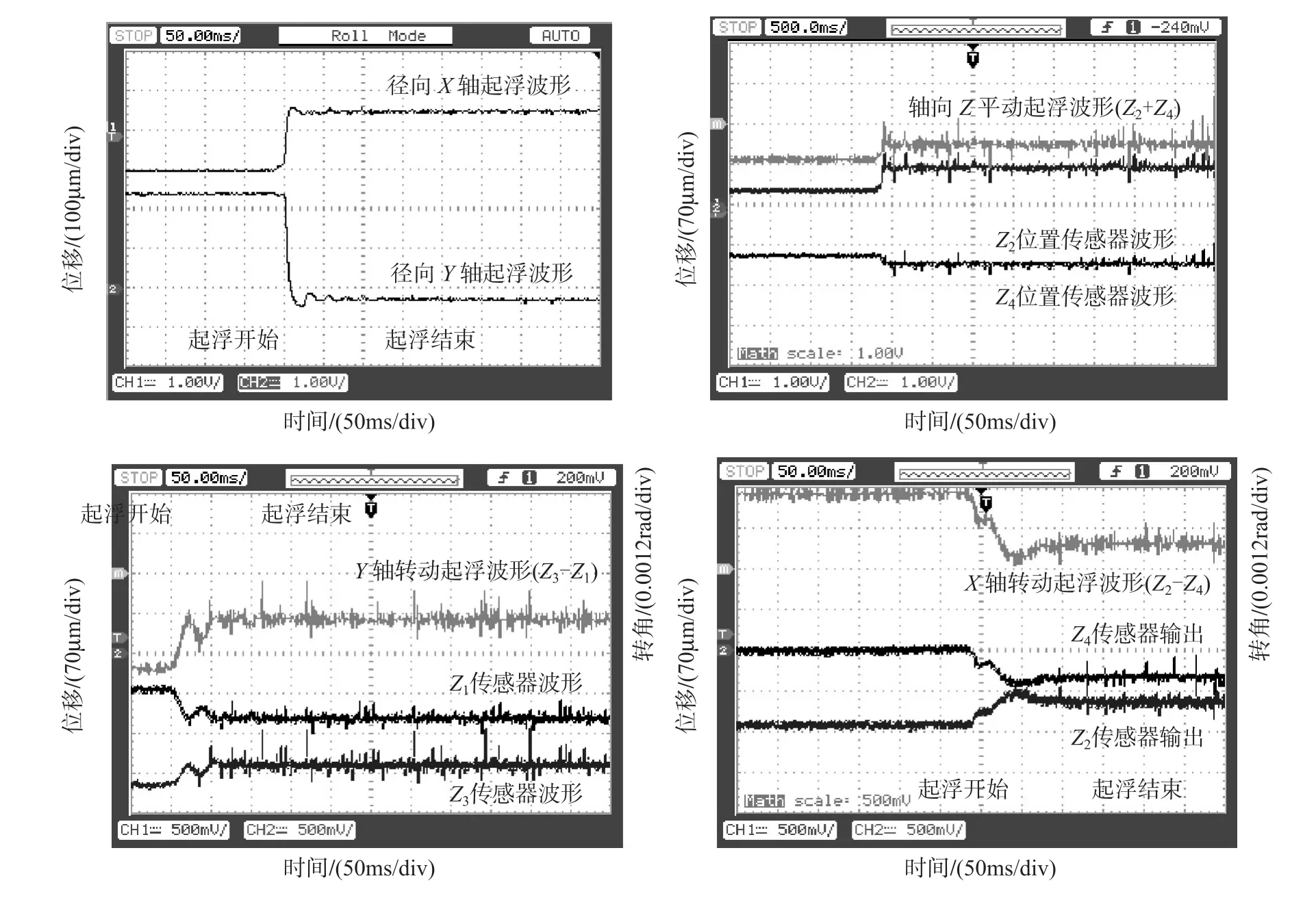
圖8 飛輪靜態(tài)懸浮傳感器波形Fig.8Wave form of flywheel static levitation
當飛輪未懸浮時,軸心軌跡如圖9所示,飛輪轉(zhuǎn)子轉(zhuǎn)動受保護軸承支撐。轉(zhuǎn)子軸心軌跡在未懸浮時并不是圓形。其主要原因是飛輪轉(zhuǎn)子軸向中心線與定子中心線間存在偏角。該偏角在X軸、Y軸轉(zhuǎn)動起浮后可以減小到較理想狀態(tài)。
飛輪穩(wěn)定懸浮后,令其低速(2000r/min)旋轉(zhuǎn),其軸心軌跡如圖10所示。由圖10可知,轉(zhuǎn)子軸心在低速旋轉(zhuǎn)時X方向波動范圍為[-60,70]μm,Y方向波動范圍為[-90,30]μm,轉(zhuǎn)子波動范圍約為可移動氣隙的30%。
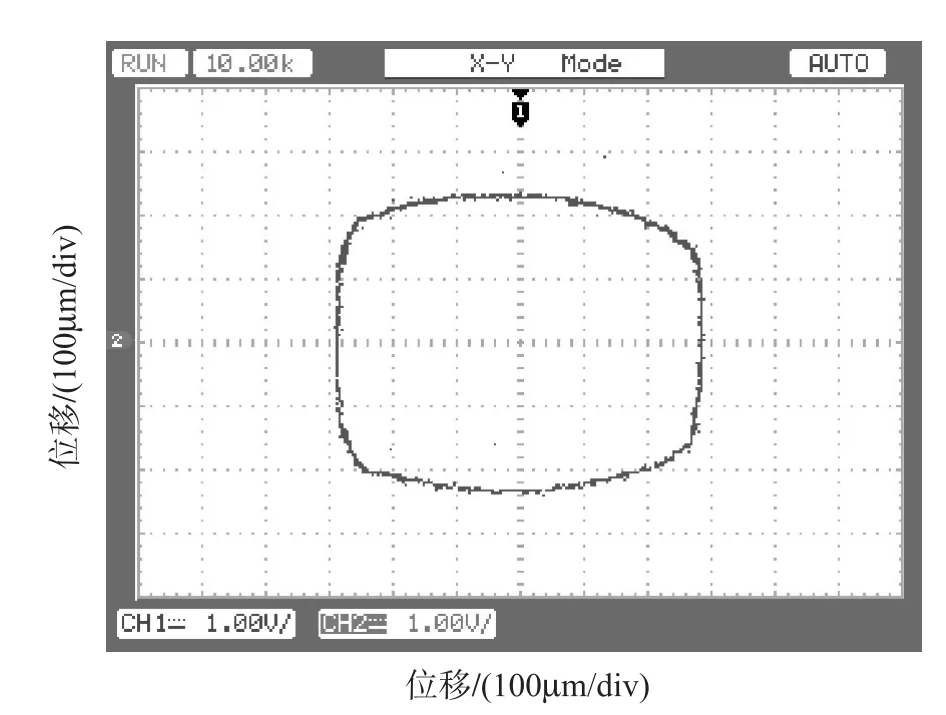
圖9 未懸浮軸心軌跡Fig.9Locus for axle centre when the flywheel is not suspended
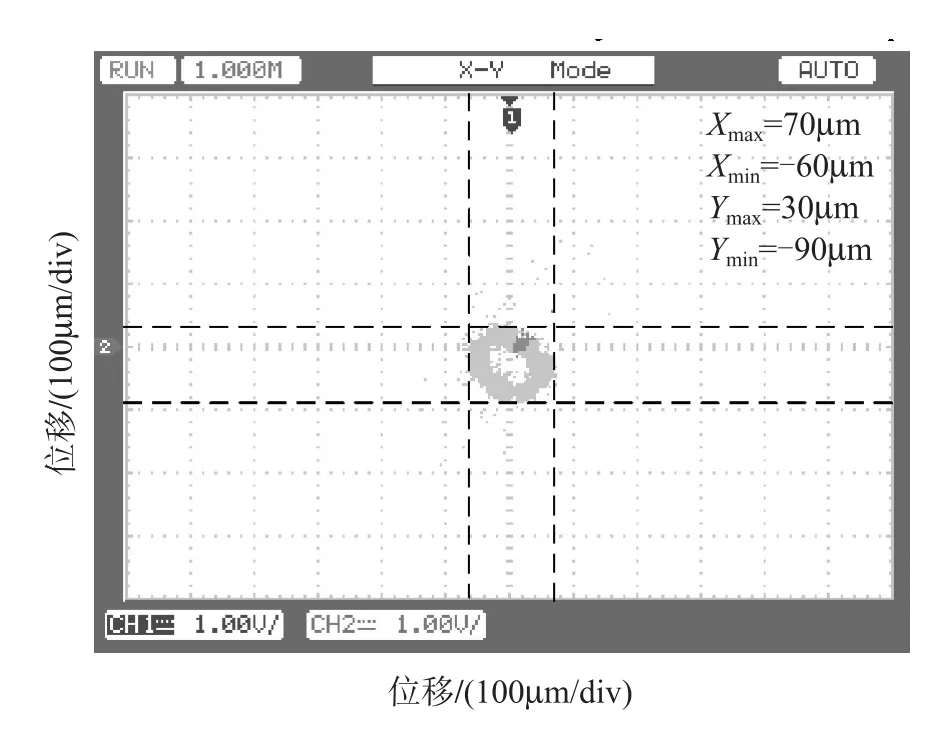
圖10 穩(wěn)定懸浮后軸心軌跡Fig.10Locus for axle centre when the flywheel is suspended
4 結(jié)論
本文介紹了磁軸承飛輪的控制系統(tǒng)模型,并以此為基礎(chǔ),實現(xiàn)了以FPGA為核心的數(shù)字控制系統(tǒng),通過實驗,證明該控制器可以實現(xiàn)飛輪的穩(wěn)定懸浮。
[1]夏剛,李建春,陳效真,馬磊忠.磁懸浮空間慣性執(zhí)行機構(gòu)淺說[C].磁懸浮空間慣性執(zhí)行機構(gòu)資料匯編:1-12. XIA Gang,LI Jian-chun,CHEN Xiao-zhen,MA Leizhong.Elementary introduction for magnetic space of inertial actuator[C].Compilation of magnetic space of inertial actuator:1-12.
[2]周新秀,房建成,劉剛.磁懸浮反作用飛輪電機滑模變結(jié)構(gòu)控制[J].電機與控制學報,2008(5):487-492. ZHOU Xin-xiu,F(xiàn)ANG Jian-cheng,LIU Gang.Reaction flywheel motor sliding mode variable structure control system[J].Electric Machines and Control,2008(5):487-492.
[3]董淑成,房建成,俞文伯.基于PID控制的主動磁軸承-飛輪轉(zhuǎn)子系統(tǒng)運動穩(wěn)定性研究[J].宇航學報,2005(3):296-300+306. DONG Shu-cheng,F(xiàn)ANG Jian-cheng,YU Wen-bo.Active magnetic bearing flywheel based on PID controllerstudy on the motion stability of flywheel rotor system[J]. Journal ofAstronavigation,2005(3):296-300+306.
[4]李巍,房建成,俞文伯,趙建輝.控制力矩陀螺用主動電磁軸承數(shù)字控制系統(tǒng)設(shè)計與實現(xiàn)[J].中國慣性技術(shù)學報,2005(4):47-51. LI Wei,F(xiàn)ANG Jian-cheng,YU Wen-bo,ZHAO Jianhui.Design and realization of a digital control system for active magnetic bearing of control moment gyroscope[J].Journal of Chinese Inertial Techonology,2005 (4):47-51.
[5]張立,劉昆.基于FPGA的飛輪磁軸承一體化控制系統(tǒng)設(shè)計[J].電機與控制學報,2012(4):84-90. ZHANG Li,LIU Kun.Integrated control system design of magnetic bearings for flywheel based on FPGA[J]. Electric Machines and Control,2012(4):84-90.
[6]Harland E Alpaugh,Jr.Digital control of an experimental active magnetic bearing rotor using open source software [D].Tufts University School of Engineering,2007.
[7]Yong Teng.Magnetic bearing system design using a genetic algorithm[D].The Faculty of Engineering and Applied Science,University of Virginia,1999.
[8]Bingsen Wang.Flywheel based AC power conditioning system using a matrix converter[D].University of Wisconsin-Madison,2006.
[9]Min Chen.Machining chatter control using active magnetic bearings[D].The Faculty of Engineering and Applied Science,University of Virginia,2007.
[10]Guoxin Li.Robust stabilization of rotor-active magnetic bearing system[D].The Faculty of Engineering and Ap-plied Science,University of Virginia,2007.
[11]Hans A.DeSmidt.Robust-adaptive active vibration control of alloy and flexible matrix composite rotorcraft drivelines via magnetic bearings:theory and experiment[D].The Pennsylvania State University,2005.
[12]Todd Andrew Begalke.Synchronous reluctance drive for flywheel batteries[D].University of Minnesota,2006.
Design of Control System for Magnetically Suspended Flywheel Based on FPGA
LIU Peng-yuan,LI Jian-chun,WANG Xiao-yu,XIAO Yue-hua,CAO Yang
(Beijing Institute ofAerospace Control Devices,Beijing 100039)
According to the five degree of freedom of permanent manget biased magnetic bearing flywheel,we analyzed the structure and control principle of it.A general electric control system of magnetic flywheel was designed.In this paper a composition of control system with FPGA as the core was introduced.And the design strategies of the controller was expounded.In the view of the data processing for flywheel,a general matrix computation was designed.Finally the static levitation and low-speed rotation experiment were completed.
magnetically suspended flywheel;FPGA;incomplete differential PID controller;matrix computation
TH133.7文獻標識志碼:A
1674-5558(2016)03-01043
10.3969/j.issn.1674-5558.2016.01.015
劉鵬遠,男,碩士,工程師,研究方向為磁懸浮軸承控制、電動舵機控制等。
2014-12-09
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25