斜置慣性平臺(tái)漂移角離線復(fù)算方法
2016-10-14 14:01:30范金華宋建英
導(dǎo)彈與航天運(yùn)載技術(shù) 2016年3期
范金華,彭 杰,宋建英
?
斜置慣性平臺(tái)漂移角離線復(fù)算方法
范金華,彭 杰,宋建英
(太原衛(wèi)星發(fā)射中心,太原,030027)
根據(jù)發(fā)射流程、飛行試驗(yàn)方案和斜置慣性平臺(tái)敏感發(fā)射點(diǎn)重力加速度的物理特性,基于平臺(tái)自標(biāo)定參數(shù)、遙測(cè)加速度計(jì)脈沖數(shù)、發(fā)射點(diǎn)大地測(cè)量成果等試驗(yàn)數(shù)據(jù),提出一種斜置慣性平臺(tái)漂移角的離線復(fù)算方法。計(jì)算比對(duì)結(jié)果表明,平臺(tái)漂移角的離線計(jì)算值與遙測(cè)輸出結(jié)果一致,各向偏差為10-5度量級(jí),此離線復(fù)算方法能夠給出遙測(cè)存儲(chǔ)器開始記錄前的平臺(tái)漂移角數(shù)據(jù)。
平臺(tái)漂移角;試驗(yàn)數(shù)據(jù);離線復(fù)算
0 引 言
采用平臺(tái)式慣性-星光復(fù)合導(dǎo)航單星方案的導(dǎo)彈在發(fā)射前需要將慣性平臺(tái)進(jìn)行斜置,使星敏感器光軸對(duì)準(zhǔn)所選星體,當(dāng)導(dǎo)彈飛出大氣層之后,根據(jù)測(cè)星結(jié)果來(lái)修正慣性導(dǎo)航誤差[1]。平臺(tái)單星方案利用恒星在空間的方位所提供的慣性空間基準(zhǔn)來(lái)校準(zhǔn)平臺(tái)臺(tái)體坐標(biāo)系,然后根據(jù)最佳修正系數(shù)來(lái)估計(jì)彈頭落點(diǎn)偏差,最后在導(dǎo)彈末修段按虛擬目標(biāo)進(jìn)行導(dǎo)引和關(guān)機(jī)控制[2~4]。
平臺(tái)斜置完成之后,需要斷調(diào)平使平臺(tái)臺(tái)體在慣性空間定向。隨后,由于陀螺漂移誤差和平臺(tái)回路誤差的影響,平臺(tái)開始漂移。平臺(tái)漂移角主要由這2個(gè)誤差因素引起,相應(yīng)的誤差系數(shù)可通過測(cè)漂方案進(jìn)行標(biāo)定[5,6]。平臺(tái)漂移角起算零點(diǎn)即為平臺(tái)斷調(diào)平時(shí)刻。平臺(tái)漂移角是斜置慣性平臺(tái)初始基準(zhǔn)偏差修正、工具誤差補(bǔ)償?shù)幕緟?shù),研究平臺(tái)漂移角的離線復(fù)算方法對(duì)飛行試驗(yàn)結(jié)果的實(shí)時(shí)診斷、彈上導(dǎo)航方案的試驗(yàn)鑒定等工作具有重要意義。
為了驗(yàn)證平臺(tái)漂移角的彈上計(jì)算輸出值的正確性,需要分析可用的試驗(yàn)數(shù)據(jù)。平臺(tái)漂移角的計(jì)算主要依據(jù)平臺(tái)射前自標(biāo)定誤差系數(shù)和遙測(cè)輸出的加速度計(jì)脈沖數(shù)。考慮到地面遙測(cè)存儲(chǔ)器啟動(dòng)記錄與平臺(tái)斷調(diào)平不是同步進(jìn)行的,需要根據(jù)物理特性對(duì)遙測(cè)存儲(chǔ)器啟動(dòng)記錄前的視速度等進(jìn)行補(bǔ)充計(jì)算。補(bǔ)充計(jì)算涉及到平臺(tái)臺(tái)體坐標(biāo)系與發(fā)射坐標(biāo)系之間的關(guān)系,關(guān)聯(lián)的參數(shù)包括射擊方位角、射向變換角度、平臺(tái)斜置方位角和高低角、平臺(tái)瞄準(zhǔn)角、平臺(tái)斷調(diào)平至彈射點(diǎn)火持續(xù)的時(shí)間、發(fā)射點(diǎn)大地測(cè)量結(jié)果(重力加速度、地理緯度、垂線偏差)等。計(jì)算時(shí),需要依據(jù)斜置慣性平臺(tái)敏感發(fā)射點(diǎn)重力加速度的物理特性,并且與發(fā)射流程和試驗(yàn)方案密切相關(guān)。
1 平臺(tái)漂移角離線復(fù)算的基本思路
本文討論的時(shí)序關(guān)系為:斜置慣性平臺(tái)在彈射點(diǎn)火前斷調(diào)平,而地面遙測(cè)存儲(chǔ)器啟動(dòng)記錄時(shí)刻介于兩者之間。彈上計(jì)算的平臺(tái)漂移角從地面遙測(cè)存儲(chǔ)器啟動(dòng)記錄時(shí)刻開始輸出,離線復(fù)算的平臺(tái)漂移角從斷調(diào)平時(shí)刻開始輸出,且斷調(diào)平時(shí)刻的平臺(tái)漂移角為零。具體時(shí)序關(guān)系如圖1所示。

圖1 時(shí)序關(guān)系
考慮到從平臺(tái)斷調(diào)平時(shí)刻到存儲(chǔ)器啟動(dòng)記錄時(shí)刻這段時(shí)間,沒有記錄平臺(tái)脈沖數(shù),平臺(tái)漂移角離線復(fù)算時(shí),分成2個(gè)時(shí)間段進(jìn)行,并以彈射點(diǎn)火時(shí)刻為分割點(diǎn)。對(duì)于有平臺(tái)脈沖數(shù)輸出的情況,可以直接根據(jù)脈沖數(shù)計(jì)算視速度,然后計(jì)算平臺(tái)漂移角;對(duì)于沒有平臺(tái)脈沖數(shù)輸出的情況,由于導(dǎo)彈相對(duì)于地球處于靜止?fàn)顟B(tài),因而可以根據(jù)平臺(tái)斜置狀態(tài)來(lái)計(jì)算視速度,進(jìn)而計(jì)算平臺(tái)漂移角。
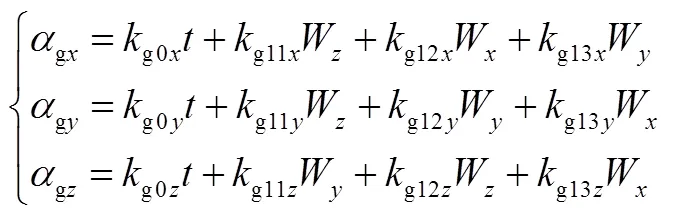
平臺(tái)漂移角的計(jì)算主要依據(jù)陀螺漂移誤差模型和平臺(tái)回路誤差模型[7]。當(dāng)僅考慮陀螺的零次項(xiàng)漂移誤差和一次項(xiàng)漂移誤差時(shí),陀螺漂移誤差模型如下:
當(dāng)僅考慮平臺(tái)靜態(tài)誤差時(shí),平臺(tái)回路誤差模型為

根據(jù)上述誤差模型,平臺(tái)漂移角的動(dòng)態(tài)影響因素包括漂移時(shí)間和臺(tái)體系視速度、視加速度、視加加速度。
2 平臺(tái)漂移角離線復(fù)算方法
首先,計(jì)算平臺(tái)斷調(diào)平時(shí)刻至彈射點(diǎn)火時(shí)刻這段時(shí)間的平臺(tái)漂移角;然后,計(jì)算彈射點(diǎn)火時(shí)刻之后的平臺(tái)漂移角。兩者的區(qū)別主要在于視速度的計(jì)算方法不同。
2.1 斷調(diào)平至彈射點(diǎn)火之間的平臺(tái)漂移角計(jì)算
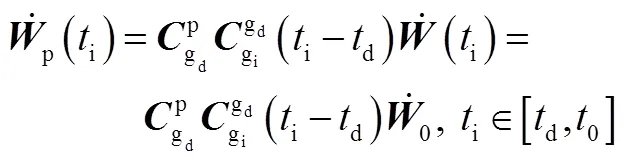
為了計(jì)算出從斷調(diào)平時(shí)刻開始的平臺(tái)漂移角,需要對(duì)視速度進(jìn)行補(bǔ)充計(jì)算。記初等轉(zhuǎn)換矩陣為,其中分別表示繞坐標(biāo)系的軸旋轉(zhuǎn)角度。

圖2 發(fā)射點(diǎn)視加速度示意
視加速度在垂線發(fā)射系中的3個(gè)分量為
(4)

圖3 發(fā)射系與臺(tái)體系之間的轉(zhuǎn)換關(guān)系

根據(jù)轉(zhuǎn)換矩陣遞推性,結(jié)合式(5)、式(6),有:
(7)
由式(3)、式(4)和式(7),平臺(tái)臺(tái)體坐標(biāo)系視加速度可由下式進(jìn)行計(jì)算:
2.2 彈射點(diǎn)火之后的平臺(tái)漂移角計(jì)算
彈射點(diǎn)火后,導(dǎo)彈相對(duì)地球開始運(yùn)動(dòng),計(jì)算視速度時(shí)需要用到加速度計(jì)脈沖數(shù),即將時(shí)刻的脈沖數(shù)相對(duì)于彈射點(diǎn)火時(shí)刻的脈沖數(shù)增量乘以在線標(biāo)定出的加速度計(jì)當(dāng)量即可計(jì)算出視速度;然后,再求視速度的一階和二階導(dǎo)數(shù)即可得到視加速度和視加加速度。最后,根據(jù)式(1)和式(2)即可計(jì)算出平臺(tái)漂移角。
3 計(jì)算驗(yàn)證
在斷調(diào)平時(shí)刻處,平臺(tái)臺(tái)體坐標(biāo)系與發(fā)射坐標(biāo)系之間的歐拉角通過射擊方位角、射向變換角度、平臺(tái)斜置方位角和高低角、平臺(tái)瞄準(zhǔn)角來(lái)確定。根據(jù)式(8),由發(fā)射點(diǎn)重力加速度值可計(jì)算出斜置慣性平臺(tái)敏感到的視加速度在臺(tái)體坐標(biāo)系中的3個(gè)分量。其中,臺(tái)體坐標(biāo)系軸的分量值在9.8 m/s2附近變化,軸的分量值位于10-1m/s2量級(jí),軸的分量值位于10-2m/s2量級(jí)。這與實(shí)際情況相符。對(duì)視加速度分別進(jìn)行積分和微分運(yùn)算,便可得到視速度和視加加速度。
計(jì)算彈射點(diǎn)火之后的平臺(tái)漂移角時(shí),首先需要對(duì)加速度計(jì)脈沖數(shù)進(jìn)行分析與修正[8],包括野值和溢出的處理等,然后再計(jì)算視速度及其各階導(dǎo)數(shù)。
基于上述計(jì)算結(jié)果,依據(jù)陀螺漂移誤差模型和平臺(tái)回路誤差模型便可計(jì)算出平臺(tái)漂移角。將離線計(jì)算結(jié)果按遙測(cè)輸出時(shí)間點(diǎn)進(jìn)行插值,而后與遙測(cè)輸出結(jié)果作差,可得平臺(tái)漂移角偏差曲線。經(jīng)分析,平臺(tái)漂移角各向偏差為10-5度量級(jí)。
4 結(jié) 論
根據(jù)斜置慣性平臺(tái)的工作特點(diǎn),結(jié)合發(fā)射流程和試驗(yàn)方案,本文提出了一種平臺(tái)漂移角的離線復(fù)算方法。這種方法根據(jù)斜置慣性平臺(tái)敏感發(fā)射點(diǎn)重力加速度的物理特性,對(duì)彈射點(diǎn)火前的視速度、視加速度、視加加速度進(jìn)行了補(bǔ)充計(jì)算,從而能夠根據(jù)陀螺漂移誤差模型和平臺(tái)回路誤差模型計(jì)算平臺(tái)漂移角。
基于試驗(yàn)數(shù)據(jù)的計(jì)算結(jié)果表明,平臺(tái)漂移角的離線計(jì)算值與彈上計(jì)算遙測(cè)輸出結(jié)果一致,各向偏差為10-5度量級(jí),且本文提出的離線復(fù)算方法能夠給出遙測(cè)存儲(chǔ)器開始記錄前的平臺(tái)漂移角數(shù)據(jù)。
[1] 李連仲, 韓金堆. 制導(dǎo)技術(shù)基礎(chǔ)[M]//陳世年. 控制系統(tǒng)設(shè)計(jì). 北京: 宇航出版社, 1996.
[2] 張艷玲, 辛萬(wàn)青, 王增壽. 平臺(tái)單星方案原理及仿真研究[J]. 導(dǎo)彈與航天運(yùn)載技術(shù), 2007(5): 16-19.
[3] 葉兵, 張洪波, 吳杰. 單星星光/慣性復(fù)合制導(dǎo)最佳星快速確定方法研究[J]. 宇航學(xué)報(bào), 2009, 30(4): 1371-1375.
[4] 張洪波, 鄭偉, 吳杰, 湯國(guó)建. 基于信息等量壓縮的單星星光-慣性制導(dǎo)原理研究[J]. 中國(guó)科學(xué)(E輯: 技術(shù)科學(xué)), 2009, 39(3): 550-555.
[5] 胡云中. 陀螺穩(wěn)定平臺(tái)漂移誤差參數(shù)的辨識(shí)方法研究[J]. 航天控制, 2004, 22(2): 10-12,18.
[6] 李巍, 曾鳴, 于志偉. 慣性平臺(tái)測(cè)漂方案的研究[J]. 哈爾濱商業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版), 2009, 25(1): 68-71,128.
[7] 程光顯, 謝全根. 制導(dǎo)與精度分析[M]//龍樂豪. 總體設(shè)計(jì)(中). 北京:中國(guó)宇航出版社, 2001.
[8] 范金華, 彭杰, 郭先鋒. 慣組脈沖數(shù)全量數(shù)據(jù)分析及軟件實(shí)現(xiàn)[J]. 導(dǎo)彈試驗(yàn)技術(shù), 2015(1): 26-30.
Inclined Inertial Platform Drift Angle off-line Recalculation Method
Fan Jin-hua, Peng Jie, Song Jian-ying
(Taiyuan Satellite Launch Center, Taiyuan, 030027)
An off-line recalculation method of inclined inertial platform drift angle was proposed according to the launch flow, the flight test scheme, and the physical characteristics of the inclined inertial platform sensing launch points gravity. The off-line recalculation method was also based on the test data, including the platform self-calibration parameters, the telemetry accelerometer pulse number, the launch points geodetic survey results. The recalculation results indicated that the off-line recalculation results of the platform drift angle were consistent with the telemetry output results, and the errors between them are in the order of 10-5measurement. In addition, the data of platform drift angle before recording of the telemetry memory was also be provided with the off-line recalculation method..
Platform drift angle; Test data; Off-line recalculation
1004-7182(2016)03-0024-04
10.7654/j.issn.1004-7182.20160306
TJ765.2+3
A
2015-09-24;
2016-01-10
國(guó)家基礎(chǔ)研究項(xiàng)目
范金華(1983-),男,博士,工程師,主要從事飛行試驗(yàn)分析與評(píng)估研究