助推滑翔導彈對地攻擊快速下壓彈道設計
2016-10-20 10:53:29李新國
彈道學報 2016年3期
喬 浩,李新國,鄭 璽
(西北工業(yè)大學 航天學院,西安 710072)
?
助推滑翔導彈對地攻擊快速下壓彈道設計
喬浩,李新國,鄭璽
(西北工業(yè)大學 航天學院,西安 710072)
為了研究助推滑翔導彈針對地面固定目標的快速打擊方法,通過受力分析,提出一種新的彈道下壓段俯沖彈道模型。采用翻身下壓的飛行方式,使導彈主升力面朝下,彈道下壓過程中以正攻角下壓為主,延后并縮短了負攻角的使用時間,獲得了更快的彈道下壓速率。以美國CAV-H為研究對象,利用高斯偽譜法進行彈道仿真計算,并與傳統彈道下壓方式進行對比。結果表明,與傳統彈道下壓方式相比,翻身下壓具有更高的彈道下壓效率及在高速飛行的高熱流區(qū)保持正攻角飛行的特點。對于采用腹部防熱設計的助推滑翔導彈,在實現彈道快速下壓的前提下,有效杜絕了熱流向背部蔓延,提高了俯沖攻擊過程中導彈的安全性。
助推滑翔導彈;彈道設計;高斯偽譜法;俯沖攻擊
助推滑翔導彈作為新一代的高超聲速武器兼具彈道導彈的超遠射程以及巡航導彈的機動性能。美國在其高超聲速武器發(fā)展計劃中,將該類武器作為一種全球快速打擊的戰(zhàn)略武器。與此同時,俄羅斯等軍事大國也在進行相關方面的研究[1~2]。
助推滑翔導彈一般采用常規(guī)彈頭以定點精確打擊的方式摧毀敵方高價值目標[3],其攻擊末段通過一系列彈道下壓機動,以接近-90°的彈道傾角垂直侵徹擊中目標。因此,如何高效快速地完成彈道下壓是該類高超聲速導彈末端攻擊必須解決的難題。助推滑翔導彈飛行過程主要分為助推爬升段、大氣層外飛行段以及再入段。現有的彈道下壓方式包含較長時間的負攻角飛行段,其下壓效能有限,且容易導致高熱流區(qū)域上移,增加機體防熱難度。負攻角氣動數據有限,氣動效應復雜,這不僅限制了飛行器機動性能的發(fā)揮,還對控制系統提出了更高的穩(wěn)定性要求[4]。
國內外對于帶落角約束的彈道設計研究較多。文獻[5]研究了臨近空間飛行器鉸鏈力矩最小的俯沖彈道設計,利用偽譜法設計了一條終端彈道傾角為-110°的下壓俯沖彈道,接近于垂直攻擊。其采用傳統的彈道下壓方式,攻角指令出現長時間負攻角。文獻[6]研究了含姿態(tài)角約束的導彈末端制導方法,對末端不同姿態(tài)角的要求有較好的滿足效果。但其彈道下壓過程中同樣出現較長時間的負攻角飛行段。現有研究大多著眼于軌跡設計的優(yōu)化算法或機動方式,未從機理上探討如何在縮短負攻角使用時間的前提下最大化發(fā)揮滑翔段導彈彈道下壓性能。本文即針對此問題進行研究。
1 快速下壓彈道建模
1.1問題描述
助推滑翔導彈彈體為面對稱構型,這使得其在大氣層內可利用氣動力進行軌跡調整。彈道下壓的本質在于減速并增大下沉率,當達到預定彈道傾角等條件后,保持零升力無控飛行直至擊中目標。由于彈道下壓段一般已經到達攻擊末段,導彈不再進行橫向機動,因此其主要飛行剖面在豎直平面內。本節(jié)即在此條件下對飛行器下壓段彈道進行分析。

圖1 主升力面朝上受力分析圖
飛行器在大氣中飛行時一般主升力面朝上,飛行中正攻角升力方向向上,負攻角升力方向向下,如圖1所示,圖中,FL為升力,FD為阻力,v為飛行器速度,m為飛行器質量,g為重力加速度。
飛行彈道的彎曲僅取決于垂直速度方向的力,記為Fn,規(guī)定使彈道下壓為正,圖1狀態(tài)下有
Fn=mgcosθ-FL
(1)
式中:θ為彈道傾角,速度矢量在當地水平面之上為正。可見,升力對于彈道下壓起相反的作用。現有彈道下壓的解決思路一般是將該作用變?yōu)檎淖饔?但當飛行器主升力面仍保持圖1方向時將不可避免地引入負攻角。而飛行數據已證實,負攻角飛行氣動系數比相同角度正攻角的較小,且容易導致飛行失穩(wěn),因此不是一種較佳的彈道下壓方案。
另外一種彈道下壓的思路在于利用機體傾側減小升力對彈道下壓的反作用,此時,
Fn=mgcosθ-FLcosσ
(2)
式中:σ為傾側角,即飛行器縱向對稱平面與速度矢量所在鉛垂面之間的夾角,飛行器繞速度矢量逆時針旋轉為正。雖然此時Fn有所增大,但在σ∈(-90°,+90°)情況下升力作用的部分對彈道下壓仍然起相反的作用,且由于傾側的引入,末端須進行傾側角快速反轉以保證鎖定目標,機動過程復雜,容易造成脫靶量增加。
本文通過對上述彈道下壓方式的分析,提出一種升力面朝下的彈道下壓方式,即翻身下壓方法。該方式具有飛行過程中較少引入負攻角的特點。由于該方案中正攻角對彈道下壓具有正的效果,因此彈道下壓更為迅速。在彈道下壓階段飛行器腹部與來流相對,熱流區(qū)域后延,防熱簡化,其受力如圖2所示。
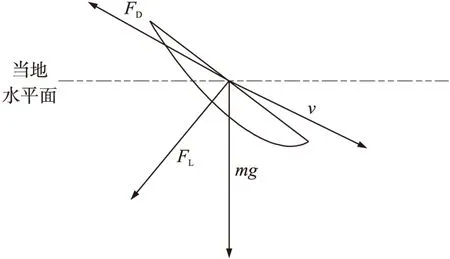
圖2 翻身下壓受力分析圖
此時有
Fn=mgsinθ+FL
(3)
可見,相比前2種方式,該種飛行方式下Fn最大,因此具有更高的彈道下壓效率。
1.2動力學建模
由于彈道下壓過程臨近終端打擊,飛行時間較短,因此可忽略地球旋轉。在上述飛行條件下,建立如下飛行器動力學模型:
(4)
式中:r為地心距;v為飛行速度;L為射程;R為地球半徑,且
(5)
(6)
式中:CD,CL分別為阻力系數和升力系數,由風洞數據擬合為攻角α和馬赫數Ma的多項式;ρ為大氣密度;S為飛行器參考面積。
觀察式(4)可知,動力學模型不同于常見再入運動模型,這主要是由升力面朝下造成的,相當于常見飛行模式傾側180°。
1.3性能指標
對于以防區(qū)外大型地面目標為打擊對象的助推滑翔導彈,其對目標的毀傷效果與落角及終端攻角關系密切。已有試驗資料表明,落角越接近垂直越可獲得較佳的侵徹攻擊效果。因此取性能指標為末端彈道傾角θf在-90°附近。最小化性能指標為
J=|θf+90°|
(7)
1.4約束條件

(8)
(9)
(10)
式中:k為與加熱模型有關的常數。
其他約束如終端高度、終端速度、終端彈道傾角等由飛行任務決定。
2 高斯偽譜法求解
軌跡設計問題一般都會轉化為最優(yōu)控制問題求解。高斯偽譜法是近年來廣泛使用的一種直接求解方法,由于其算法已較為成熟,且在本文中僅作為探求最大彈道下壓能力的手段,因此本文僅對其求解過程進行簡述。
高斯偽譜法在時域(-1,1)內選擇Legendre-Gauss(LG)點作為配點,配點與初始、末端時刻點構成最優(yōu)控制問題的離散點,之后將狀態(tài)量、控制量在這些點上進行離散。以初始時刻點與配點為節(jié)點構造Lagrange插值多項式進行狀態(tài)逼近;以配點作為節(jié)點構造Lagrange插值多項式進行控制逼近。在配點處由全局插值多項式求導獲得配點處狀態(tài)量導數,從而可將微分方程約束轉換為代數約束。求解過程中的性能指標及終端狀態(tài)由高斯積分公式得出。經上述離散過程之后,原最優(yōu)控制問題轉化為非線性規(guī)劃問題,之后通過一些較為成熟的非線性求解器即可求解[7]。
3 彈道下壓效果對比與分析
為驗證本文所提方案的效果,以美國CAV-H面對稱滑翔導彈為研究對象,其總體及氣動參數見文獻[8],分別采用正向下壓與翻身下壓2種方案進行對比,仿真初始條件如表1所示,表中,h為導彈距地面高度,末端高度設為導彈到達地面。

表1 仿真初始條件
圖3為2種方案的高度對比。由圖3可知,翻身下壓高度衰減迅速,由初始高度到達地面所用時間更少,在對攻擊快速性要求較高的場合具有較大優(yōu)勢。
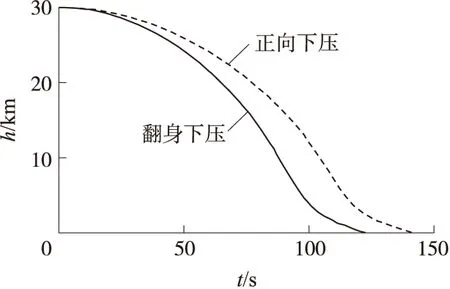
圖3 高度對比
圖4所示速度的衰減情況表明,2種彈道下壓方式在飛行末端均遇到速度的快速減小,其中翻身下壓減小更為迅速。速度衰減幅度的快速增加出現在100 s附近,此時飛行高度已降至5 km左右,主要進入彈道傾角的精確調整及保持階段。這種現象表明末端對落角性能的要求會對速度帶來一定的損失。對于動能侵徹武器須在這一點上進行折衷,使導彈末端仍保留足夠的攻擊速度。
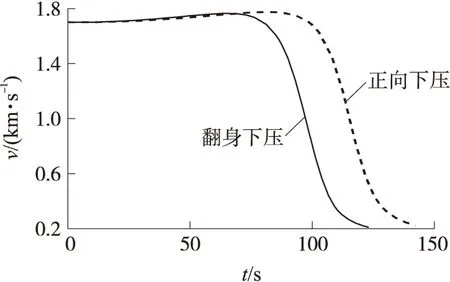
圖4 速度對比
由于翻身下壓方式中高度、速度衰減迅速,因此翻身下壓方式射程不及正向下壓,如圖5所示。這需要提前確定導彈正常飛行與翻身下壓的切換點,以保證導彈順利到達目標。

圖5 飛行射程對比
2種彈道下壓方式最終所得彈道傾角如圖6所示,二者過渡方式略有不同,但最終都以接近于垂直的方式到達目標。
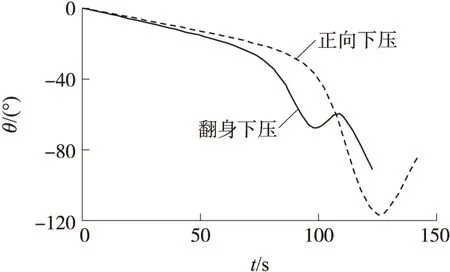
圖6 彈道傾角對比
相應攻角指令如圖7所示,翻身下壓方式在0~100 s飛行階段始終保持正攻角飛行,對應高度為30~5 km階段。僅在末端進入彈道傾角保持階段出現負攻角;而正向下壓僅在初始較短時間以正攻角飛行,之后一直以負攻角指令進行彈道下壓,且在軌跡末端攻角進一步減小。
由于現有高超聲速飛行器普遍采用腹部防熱設計,且由式(10)可知,在相同空氣密度條件下,飛行速度越大,來流的熱流率越大,因此彈道下壓初始階段即對應高熱流區(qū)域。此時為考慮熱防護,飛行器必須以有防熱設計的腹部迎接來流,即必須以正攻角飛行。由圖7可以看出,翻身下壓有效杜絕了高熱流區(qū)域負攻角的出現。而采用常規(guī)彈道進行彈道下壓時,飛行器快速進入負攻角飛行,飛行器背部處于迎風面。在整個高熱流區(qū)域,飛行器背部承受來流加熱,由于背部防熱能力較為薄弱,當熱流總溫超過材料、儀器等限制后,可能威脅到飛行器的正常飛行。另外,過長時間的負攻角飛行也將對制導、控制等系統提出更嚴苛的要求。

圖7 攻角指令對比
另外,由圖2可以看出,正向下壓與翻身下壓分別在100 s和120 s高度進入3 km以下的攻擊末端。由圖7可知,2種彈道下壓方式下攻擊末端對應的攻角幅值相差不大,且均未達到設計限幅,因此仍然具有一定的機動調節(jié)能力。同時,由于導彈在該階段主要為了維持打擊方向,即彈道傾角幅值盡量接近90°,過大的機動可能會造成彈道方向偏離垂直,這一點需要折衷考慮侵徹能力與反攔截機動。當導彈面臨多枚攔截彈飽和攔截時,需要導彈的制導、控制系統具有更快的響應能力,對彈道作出快速修正,必要情況下,需要引入末端螺旋進行攻擊。
2種下壓彈道對比如圖8所示。
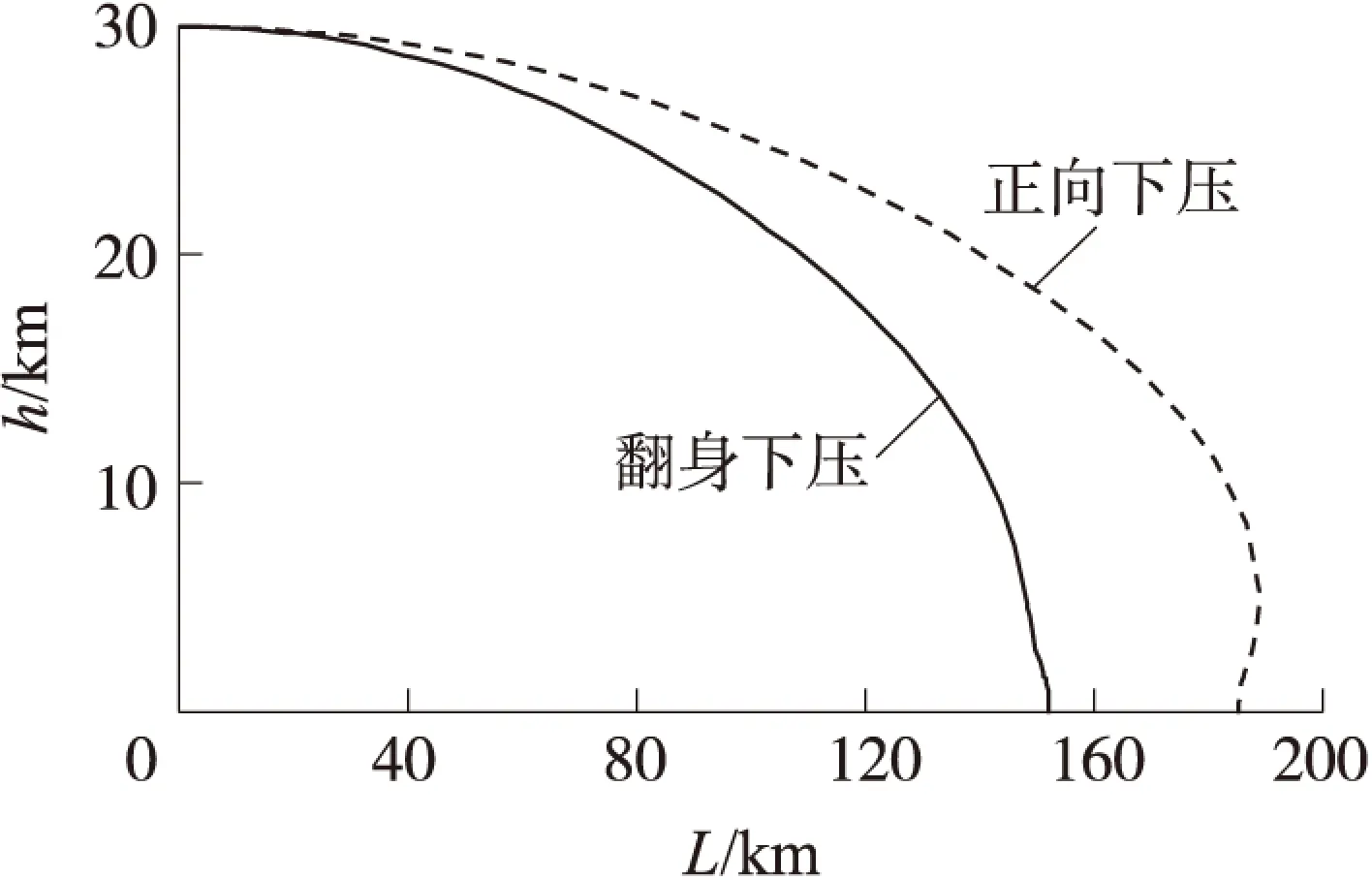
圖8 下壓彈道對比
由仿真結果可知,翻身下壓與正向下壓相比具有彈道下壓迅速、飛行過程中負攻角飛行段縮短的特點。但與此同時,翻身下壓也帶來了射程縮短,末端速度快速衰減的問題。這就需要在選擇翻身彈道下壓方式時結合實際攻擊對象綜合考慮射程、末端速度與侵徹彈道傾角之間的關系,從而獲得滿足攻擊需求的最佳飛行彈道。
4 結束語
本文針對導彈對地攻擊彈道下壓問題進行了深入研究,從受力機理上分析了彈道下壓問題的實質,并提出一種翻身下壓的彈道下壓方法。通過與正向下壓進行對比,得出以下結論:
①翻身下壓具有更快的彈道下壓速度,飛行器能更快到達地面目標。現有飛行器在射程足夠的前提下需要快速彈道下壓時采用翻身下壓具有更高的下壓效率。
②與正向彈道下壓相比,翻身下壓大部分時間為正攻角飛行,僅在飛行末端速度較低的彈道傾角保持階段出現負攻角調整;而正向彈道下壓整個飛行過程中大部分為負攻角。負攻角會明顯導致熱流向飛行器背部蔓延,對控制系統提出更高要求。
③本文所得結論對助推滑翔導彈等面對稱飛行器具有普遍適用性,翻身下壓在對地攻擊中具有較高的彈道調節(jié)效率,具有較好的應用前景。
④翻身下壓過程中,飛行器動力學模型僅對傾側角定義域進行擴展,并未改變模型本身。因此飛行器導航、制導、控制等系統不需要進行大的改動,只需進行必要的擴展校正。另一方面,由于彈道下壓更快,要求對導航信息的處理更為迅速;制導周期必須縮短,以加快制導指令更新;控制系統需要具有更快的響應能力,以準確跟蹤制導指令。
[1]李瑜,崔乃剛,郭繼峰.助推-滑翔導彈發(fā)展概況及關鍵技術分析[J].戰(zhàn)術導彈技術,2008(5):13-19.
LI Yu,CUI Nai-gang,GUO Ji-feng.Development and key technology analysis of boost-glide missile[J].Tactical Missile Technology,2008(5):13-19.(in Chinese)
[2]雍恩米,陳磊,唐國金.助推-滑翔彈道的發(fā)展史及基于該彈道的制導武器方案設想[J].飛航導彈,2006(3):20-23.
YONG En-mi,CHEN Lei,TANG Guo-jin.Development history and preliminary scheme for boost-glide trajectory[J].Winged Missiles Journal,2006(3):20-23.(in Chinese)
[3]李瑜,楊志紅,崔乃剛.助推-滑翔導彈彈道優(yōu)化研究[J].宇航學報,2008,29(1):66-71.
LI Yu,YANG Zhi-hong,CUI Nai-gang.A study of optimal trajectory for boost-glide missile[J].Journal of Astronautics,2008,29(1):66-71.(in Chinese)
[4]趙漢元.飛行器再入動力學和制導[M].長沙:國防科技大學出版社,1997.
ZHAO Han-yuan.Dynamics and guidance of a reentry vehicle[M].Changsha:National University of Defense Technology Press,1997.(in Chinese)
[5]徐明亮,劉魯華,湯國建,等.高超聲速臨近空間飛行器鉸鏈力矩最小俯沖彈道設計[J].彈道學報,2011,23(3):1-6.
XU Ming-liang,LIU Lu-hua,TANG Guo-jian,et al.Design of dive trajectory of hypersonic near-space vehicle with minimum hinge moment[J].Journal of Ballistics,2011,23(3):1-6.(in Chinese)
[6]QIN T,CHEN W H,XING X L.A method for precision missile guidance with impact attitude angle constraint[J].Journal of Astronautics,2012,33(5):570-576.
[7]HUNTINGTON G T.Advancement and analysis of a Gauss pseudo spectral transcription for optimal control problems[D].Cambridge,MA:Massachusetts Institute of Technology,2007.
[8]PHILLIPS T H.A common aero vehicle(CAV)model description and employment guide[R].Arlington,Massachusetts:Schafer Corporation for AFRL and AFSPC,2003.
Design of Fast Down-pressuring Trajectory for Ground Attack of Boost-glide Missile
QIAO Hao,LI Xin-guo,ZHENG Xi
(School of Astronautics,Northwestern Polytechnical University,Xi’an 710072,China)
To study the method of boost-glide missile striking ground fixed target rapidly,a new trajectory model for diving phase was proposed by analyzing the force.Adopting the rollover pushing flight,the main lifting surface of missile was faced down,and the angle of attack was almost positive through the flight.The appearance of negative attack angle was delayed,and the duration was shorten.The fast ballistic diving rate was obtained.Taking the CAV-H as the research object,the proposed method was compared with the normal diving method by using Gauss pseudospectral method.The results show that the proposed method is more efficient than the normal one,and the angle of attack is maintained positive in the high heat flow zone in the high-speed flight phase.For the boost-glide missile with abdomen thermal design,the heat flow can be prevented spreading to the back of missile,and the security of diving attack improves.
boost-glide missile;trajectory design;Gauss pseudospectral method;diving attack
2016-04-20
國家“863”計劃項目
喬浩(1989- ),男,博士研究生,研究方向為高超聲速導彈彈道設計,制導與控制。E-mail:1030483026@qq.com。
TJ303.4
A
1004-499X(2016)03-0007-05