類腦計算芯片與類腦智能機器人發展現狀與思考*
2016-10-21 06:47:09陶建華陳云霽1中國科學院自動化研究所北京1001902中國科學院計算技術研究所北京1001903中國科學院腦科學與智能技術卓越創新中心上海200031
中國科學院院刊 2016年7期
陶建華陳云霽1 中國科學院自動化研究所 北京 1001902 中國科學院計算技術研究所 北京 1001903 中國科學院腦科學與智能技術卓越創新中心 上海 200031
類腦計算芯片與類腦智能機器人發展現狀與思考*
陶建華1,3**陳云霽2,3
1 中國科學院自動化研究所 北京 100190
2 中國科學院計算技術研究所 北京 100190
3 中國科學院腦科學與智能技術卓越創新中心 上海 200031

類腦智能是以計算建模為手段,受腦神經和人類認知行為機制啟發,并通過軟硬件協同實現的機器智能。類腦器件以及類腦機器人分別作為類腦智能研究的重要內容,其在類腦研究領域受到國內外學者的廣泛關注。文章首先分析了類腦器件與計算系統中的類腦芯片和類腦機器人的發展現狀和應用前景,重點探討了類腦芯片在模擬人腦神經元模型和認知計算方面,以及類腦機器人在感知控制和智能生長方面的研究內容。然后,文章介紹了在中科院先導專項支持下,我國在這一方面的初步研究進展以及未來發展方向。最后,針對現有研究中遇到的問題,文章對類腦計算芯片與類腦智能機器人的進一步研究提出了建議,并指出未來研究在仿人運動模型、類人神經運動控制、人機協同的智能機器人控制等方面有望取得重大突破。
類腦計算芯片,類腦智能機器人,人機協同,智能生長
近年來,以圖像識別、語音識別、機器翻譯、廣告推薦和數據挖掘為代表的一系列以智能為核心的應用已經成為計算機的主流負載。據市場調研機構 TrendForce 的報告,2015 年全球智能終端的出貨量接近 17 億臺,并以每年 25% 的速度增長。智能終端、智能機器人、智能硬件、智能互聯網等與人工智能、大數據技術交叉融合,一起促使人類社會邁向信息時代的高級階段:智能時代。
隨著智能時代對大規模數據處理的要求,現有的處理器結構日益顯得乏力。例如,谷歌大腦用了上萬個通用處理器和耗時數天來學習如何識別貓臉;AlphaGo下圍棋時使用了上千個通用處理器和數百個圖形處理器,平均每局耗電電費近 3 000 美元。對于很多智能技術來說,采用傳統通用處理器的實現方案會導致計算成本和計算速度均難以承受。而人的大腦由大量的神經元(Neuron)通過突觸(Synapse)連接在一起,構成了極其復雜的運算網絡。目前,通過模擬人腦神經元信息處理機制的深度神經網絡技術已經成為智能時代最為重要的建模方法,將深度神經網絡技術融合到計算芯片(又稱為類腦計算芯片)也日益受到重視。事實上,在 20 世紀 80 年代,超大型體積電路(VLSI)主要研制者之一 Carver Mead 已經開始利用大規模集成電路來實現此類神經網絡計算功能,這項工作獲得了美國太空總署(NASA)與國家衛生研究院(NIH)的重視。然而在相當長的一段時間里,基于傳統互補金屬氧化物半導體(CMOS)技術的類腦計算芯片的實現一直進展緩慢。2007 年納米尺寸憶阻器(Memristor)的出現使得類腦計算芯片的研究有了突飛猛進的發展,它可有效實現可調節突觸強度的生物神經突觸和神經元之間的互聯,從而為類腦計算芯片的快速發展奠定重要基礎。
與類腦計算芯片同步發展的還有類腦智能機器人。我國政府提出的《中國制造 2025》規劃綱要將機器人產業發展作為智能制造重點推進的領域之一。目前,機器人已經被廣泛應用于汽車及零部件制造、機械加工、電子電氣及食品工業等諸多領域,成為衡量國家制造業水平和科技水平的重要標志。盡管已有機器人經常也被稱為“智能”機器人,然而這些“智能”機器人能夠實現的動作及行為能力基本是通過預定義的規則實現的,而人類進行動作、行為的學習主要是通過模仿及與環境的交互實現的。此外,目前“智能”機器人還不具有類腦的多模態感知及基于感知信息的類腦自主決策能力。在運動機制方面,目前智能機器人不具備類人的外周神經系統,其靈活性和自適應性與人類運動系統還具有較大差距。
隨著人工智能、機器人和傳感器技術的不斷發展,機器人已經由傳統在線示教工作模式向智能工作模式方向發展,結合腦科學研究成果,有希望為機器人理論和應用研究帶來新的突破,最終有望成功制造類腦智能機器人。類腦智能機器人系統是融合了視覺、聽覺、思考和執行等能力的綜合智能系統,它能夠以類似于人腦的工作方式運行。同時,類腦智能機器人力圖將人的內部機理融入機器人系統,從而提高機器人的認知、學習和動作控制能力。通過融入對人的機理的探索,有望實現類腦智能機器人與人“共情”,從而產生更深度的交互與合作,也有望對國防、工業、服務業等領域提供更多的幫助[1]。
本文針對類腦計算芯片和類腦智能機器人發展的迫切需要,分析其技術發展現狀,并對迫切需要展開的研究內容進行一些思考。
1 類腦芯片
廣義上來講,“類腦芯片”是指參考人腦神經元結構和人腦感知認知方式來設計的芯片。很顯然,“神經形態芯片”就是一種類腦芯片,顧名思義,它側重于參照人腦神經元模型及其組織結構來設計芯片結構,這代表了類腦芯片研究的一大方向。隨著各國“腦計劃”的興起和開展,涌現出了大量神經形態芯片研究成果,受到國際上的廣泛重視并為學界和業界所熟知。例如,歐盟支持的 SpiNNaker 和 BrainScaleS、斯坦福大學的 Neurogrid、IBM 公司的 TrueNorth 以及高通公司的 Zeroth。
TrueNorth 是 IBM 潛心研發近 10 年的類腦芯片。美國 DARPA 計劃從 2008 年起就開始資助 IBM 公司研制面向智能處理的脈沖神經網絡芯片。2011 年,IBM 公司通過模擬大腦結構,首次研制出兩個具有感知認知能力的硅芯片原型,可以像大腦一樣具有學習和處理信息的能力。類腦芯片的每個神經元都是交叉連接,具有大規模并行能力。2014 年,IBM 公司發布了稱為“TrueNorth”的第二代類腦芯片。與第一代類腦芯片相比,TrueNorth芯片性能大幅提升,其神經元數量由 256 個增加到 100 萬個;可編程突觸數量由 262 144 個增加到 2.56 億個;每秒可執行 460 億次突觸運算,總功耗為 70 mW,每平方厘米功耗 20 mW。與此同時,TrueNorth 處理核體積僅為第一代類腦芯片的 1/15。目前,IBM 公司已開發出一臺神經元計算機原型,它采用 16 顆 TrueNorth 芯片,具有實時視頻處理能力[2]。TrueNorth 芯片的超強指標和卓越表現在其發布之初就引起了學界的極大轟動。
與 TrueNorth 不同,Zeroth 則是高通公司近幾年才開展研究的“認知計算平臺”,但它卻在業界引起了巨大的震動。原因就在于它可以融入到高通公司量產的 Snapdragon 處理器芯片中,以協處理的方式提升系統的認知計算性能[3],并可實際應用于手機和平板電腦等設備中,支持諸如語音識別、圖像識別、場景實時標注等實際應用并且表現卓越。
類腦芯片研究的另一大方向則是參考人腦感知認知的計算模型而非神經元組織結構。具體講就是設計芯片結構來高效支持成熟的認知計算算法,如人工神經網絡算法或目前備受關注的深度神經網絡。例如,2012 年,中科院計算所研制了當時國際上首個支持深度神經網絡處理器架構芯片“寒武紀”[4,5]。該技術兩次獲得計算機體系結構領域主要國際會議 ASPLOS[4]和 MICRO[5]最佳論文,其設計方法和達到的性能得到了國際上很好的認可。該芯片可以作為類腦芯片這個研究方向上的杰出代表。
圖1 的兩個芯片可以作為類腦芯片兩大方向上的代表成果。比較而言,TrueNorth 芯片采用了神經形態的組織結構和新興的“脈沖神經網絡”算法,因此具有更低的功耗。但也正因為如此,其數據編碼信息損失很大,導致算法準確度不及目前的成熟算法。例如,在手寫數字識別上,TrueNorth 的脈沖神經網絡準確度大約是 90%左右,而 20 世紀 80 年代的人工神經網絡已經可以達到95% 的準確度,目前深度神經網絡技術的準確度更超過了 99%。
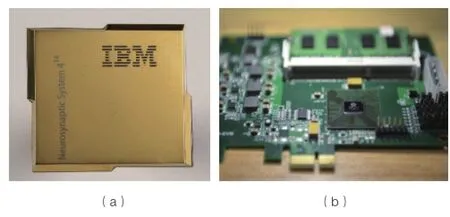
圖1 IBM 研制的“TrueNorth”芯片(a)和中科院計算所研制的“寒武紀”芯片及其板卡(b)
這個比較并非說明類腦芯片這兩大方向孰優孰劣,而是展示了類腦芯片研制的客觀現狀。卻也恰恰能夠明確了這樣一個事實:即參考已知的神經元模型、結構與工作方法可以發展出很好的“類腦智能”。隨著神經科學的進一步發展,人們對大腦神經系統工作方式的逐漸清晰,脈沖神經網絡算法可望進一步發展,其準確度也可望得到進一步提高從而可以實用,這也正是類腦芯片研究的目標。
實際上,類腦芯片研究的這兩大方向只是側重點不同,而并非彼此互斥,而且很多研究會逐漸模糊化這兩個方向之間的界限。類腦芯片完全可以同時參考神經元組織結構并支持成熟的認知計算算法,這并不矛盾。當然,這種趨勢也并不排除對該領域中某一點的重點研究。如憶阻器可以很好地模擬神經元之間的突觸連接及其可塑性,其研究進展使得構建大規模神經元結構的可能性更大。2012 年,英特爾正是以憶阻器和橫向自旋閥(Lateral Spin Valves)兩項技術為基礎開始了神經形態類腦芯片的研制[6]。
在當前大數據和人工智能火熱的時代,類腦芯片的研究受到了各國政府、大學和研究機構、國際大公司甚至是很多新興的創新型小公司的青睞和聚焦,從不為人知突然進入到了公眾視野。隨著類腦芯片的百花齊放,勢必會帶來芯片應用領域的一場革命,甚至將改變人們的日常生活方式。
2 類腦智能機器人的仿生機構與感知控制
類腦智能機器人首先涉及到的是機器人的仿生機構和感知控制,而仿肌肉驅動器是其中的重要部分,這些仿肌肉驅動器可以省卻齒輪、軸承,避免復雜的結構,同時減輕重量,具有更好的應用效果。如 Shahinpoor 等人[7]用 4 片重 0.1g 的人工肌內材料 IPMC 作手指組成的機械手,在 5 V 的電壓下提起了 10.3g 的石子, 所需功率為 25 mW。如用傳統機械裝置實現這個動作, 其機構將非常復雜。
雖然自20世紀60年代以來,日本以及美國DRAPA等機構不斷進行仿肌肉驅動器的研究,但還是隨著近10年材料和新型傳動系統的發展才真正實現一系列的突破。目前制作的仿肌肉驅動器可以分為材料類、機械類和生物類。材料類的仿肌肉驅動器主要代表有形狀記憶合金(Shape Memory Alloy,SMA)、電致收縮聚合物(Electroactive Polymer,EAP)、壓電陶瓷(Piezoelectric Transducer,PZT)、磁致收縮聚合物、功能凝膠、液晶收縮聚合物等。此類仿肌肉驅動器的共同特點是模擬動物肌肉收縮產生力這一工作特性,利用材料在不同的外部控制下,如電壓、電流、pH 值等,材料內部的成分發生物理變化,產生形變和力。機械類的仿肌肉驅動器,主要代表有氣動人工肌肉(Pneumatic Artificial Muscle,PAM)、液壓人工肌肉(Hydraulic Artificial Muscle)、電致收縮器、磁致收縮器等,其中由波士頓動力研制的Atlas 類人機器人就采用了液壓人工肌肉。不同于材料類仿肌肉驅動器,機械類仿肌肉驅動器都是結構發生變化,產生收縮和力。生物類的仿肌肉驅動器目前尚處于實驗室研制階段,目前主要是利用動物活體細胞來充當驅動器,美國 DRAPA 資助麻省理工學院研制的魚形仿生機器人,由活體肌肉驅動,最大速度 45 mm/s,而在類人機器人上尚未進行類似的研究[8]。
在這些研究的基礎上,瑞士蘇黎世大學搭建了擁有“肌腱”和“骨頭”的機器人平臺 ECCE Robot(圖 2),相關研究成果在 2010 年獲得美國 Popular Mechanics 報道,列為 2010 年10 大創新概念首位[9]。此外,波士頓動力還試圖研制一款更新型仿生肢體,試圖采用 3D 打印的方式,將所有的液壓元件直接打印到其機器人肢體的“骨頭”結構中,使之更具有仿生元素,比如“類動脈式的液壓管道布局”、看上去很像骨頭的支架等(圖 3)。
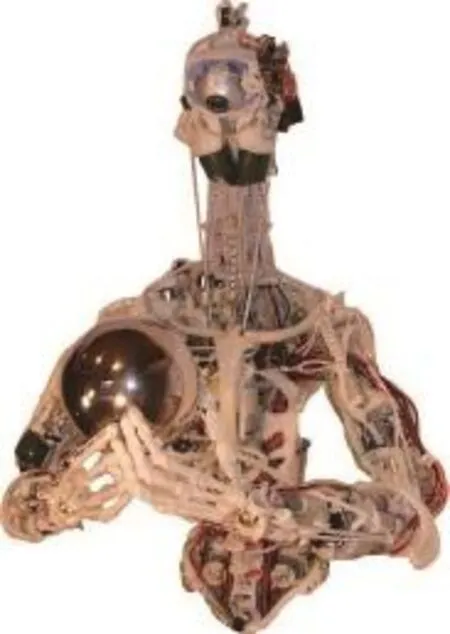
圖2 ECCE Robot 平臺[9]
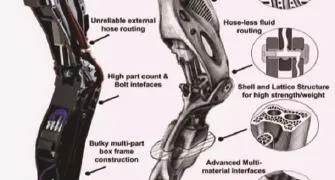
圖3 波士頓動力正在研制的新型仿生肢體結構圖
除了具有仿生結構和仿生運動能力,類腦智能機器人還以腦科學和神經科學的研究為基礎,使機器人以類腦的方式實現對外界的感知和自身的控制。人的運動系統由骨骼、關節和肌肉組成,相關的肌肉收縮或舒張由中樞神經系統與外周神經系統協同控制。以類腦的方式實現感知與控制的一體化,使得機器人能夠模仿外周神經系統感知、中樞神經系統的輸出與多層級反饋回路,實現機器人從感知外界信息到自身運動的快速性和準確性。
針對這項技術,瑞士洛桑理工學院(EPFL)于 2015年開發了一個神經系統仿真工具(The Neural Simulation Tool,NEST)。在該仿真工具中,研究人員建立了一個數字化的老鼠大腦計算模型和虛擬老鼠身體模型,通過把這兩個模型結合起來,來模擬大腦和身體的互作用的神經機制,這為類腦機器人的神經系統模擬提供了基礎[10]。目前,他們已在模型中模擬出一只小白鼠完整大腦中約2 100 萬個神經元中的 3.1 萬個模擬神經元[11]。雖然,將神經系統和仿生機器人相結合進行研究,還只是處在初步階段,但已經建立的腦網絡模型,以及運動神經和各種運動控制上的一系列研究成果,已為類腦智能機器人的感知與控制回路的進一步研究奠定了很好的基礎。
與類腦智能機器人密切相關的技術,如腦機接口[12]、神經假體[13]等,近幾年也取得了積極的進展。腦機接口可以使計算機從大腦神經活動獲知人的行為意
向,其關鍵在于神經解碼,將大腦的神經信號轉化為對外部設備的控制信號[12],其又分為侵入式腦機接口和非侵入式腦機接口。其中侵入式腦機接口能在癱瘓病人的大腦運動區植入電極陣列,提取人的運動意向從而控制機械手臂的動作[13];非侵入式腦機接口是用緊貼頭皮的多個電極采集大腦腦電圖(EEG)信號從而控制機械臂或飛行器[14]。而在神經假體方面,美國 DARPA 正投資研發一種芯片,通過植入該芯片可以幫助腦部受傷的人恢復記憶,并干擾甚至消除一些不愉快的記憶(如戰爭記憶)。目前此技術已在老鼠上取得了不錯效果。此外,科研人員在視覺神經假體、運動神經假體方面也均取得很好進展,并已成功進行應用,以幫助人們恢復部分視覺功能或部分替代四肢功能[15,16]。雖然腦機接口和神經假體等方面的研究還有很大的提升空間,但已有的研究成果為類腦智能機器人的研究提供了很多的借鑒。
3 類腦機器人的智能生長
在類腦智能機器人研究中,如何從根本上提升機器人的智能,是機器人研究領域的一個重要問題。經歷了長期的發展過程,人們普遍認為機器通常在動力、速度、精巧性方面具有一定的優勢,而人類具有智能、感知、情感等機器部分具有或者不具有的能力和特點。人們自然希望可以將二者各自的優點融合在一起,實現“人機協作”。早在 20 世紀 50 年代,已有研究人員開展了相關的工作,從具體任務出發(如工業制造),研究離線狀態下的人機交互,讓機器人在人的指引下完成任務學習。20 世紀 90 年代,人們開始研究實時交互問題,將服務機器人與人結合在一起。然而這種協作主要從功能角度使人和機器人共享智能,并不算真正意義上的融合。在這一過程中,人做一部分工作,機器人做一部分工作,二者分工完成同一任務。自 2010 年來,人們更加關注“認知-合作”,機器人作為人的“同事”,和人在一起工作。智能人機協同需要計算機在陌生的環境通過對周圍環境的觀察以及周圍環境的反饋刺激,自主整合新舊知識,并進行綜合智能決策,即要求計算機具有類腦的交互學習機制。隨著人工智能技術和新材料技術興起,智能機器人行業將是未來“腦科學研究”和“腦認知與類腦計算”研究成果的重要產出方向。在實際的應用場合,新一代的機器人或者新型人工智能必須要具有通過交互從外界獲得知識,并通過智能增長的方式進一步了解外部世界的能力。建立基于交互的從零學習及智能生長認知模型,使得計算機能夠像嬰兒一樣,在與人的交互過程中進行錯誤糾正與知識積累,實現模仿人類認識外部世界的智能增長[17]。
國際上一些機構已紛紛開展人機協同下機器人智能生長的研究,如麻省理工學院人工智能實驗室增量人機協同研究組(Increasing Man-Machine Collaboration MIT)采用增強學習讓人與機器人(包括飛機與小汽車等)在未知環境自由協作,讓計算機自動配合人并與人交互,在共同決策完成既定任務的同時,機器人也通過交互過程不斷學到新的知識。此外,谷歌和百度的無人駕駛汽車平臺也在進行著類似的嘗試。
DeepMind 公司(2014 年被 Google 公司收購)提出了 Neural Turing Machine 方法,利用深度增強學習,實現了靠不斷試錯學習就可獲得提高的游戲人工智能[16]。這些智能靠著對游戲視頻的觀察來自動尋找出模式,然后操作控制器,并獲得得分的反饋結果(高分獎勵),通過這樣的交互方式不斷學習新的知識和技能。此外,Deep-Mind 還在研制基于長短期記憶的遞歸神經網絡(Long Short-Term Memory-Recurrent Neural Network, LSTMRNN)控制的無人機,通過交互式的學習可不斷提高無人機飛行的效果。
在未來,人們希望可以將人的智能更深程度地引入機器人系統,從機理上對人進行模仿,使機器人能夠像人一樣思考,從而“配合”人的工作,共同完成任務。類腦智能機器人不但是未來人工智能研究重要的外顯載體,而且其在未來服務業、智能家居、醫療、國家與社會安全等領域都具有極為廣泛的應用價值。
4 中科院 B 類先導專項下的類腦芯片與機器人研究工作
作為腦科學研究的重要組成部分,類腦智能的研究已受到我國科研人員的高度重視,尤其是近兩年來,在中科院“腦功能鏈接圖譜與類腦智能研究”B 類先導專項的支持下,中科院自動化所(承擔類腦機器人與人機協同的智能生長研究)、中科院計算所(承擔類腦計算芯片研究)、中科院半導體所(承擔類腦計算芯片研究)、中科院上海微系統所(承擔類腦視覺器件研究)等單位的合作,使我國在類腦芯片和類腦智能機器人方面的研究獲得了非常積極的進展。
在類腦計算芯片方面,項目組繼“寒武紀”芯片設計完成后,已經成功地進行了流片,通過了初步階段的全部功能測試,并于 2016 年提出了國際上首個神經網絡通用指令集,該指令集直接面對大規模神經元和突觸的處理,一條指令即可完成一組神經元的處理。模擬實驗已經表明,采用該指令集的深度學習處理器相對于 x86 指令集的 CPU 有兩個數量級的性能提升[18]。進一步的研究將集中在類神經形態的神經元計算芯片的構建和優化上。
在類腦智能機器人方面,項目組在人機動力學模型及表面肌電圖(sEMG)信號的運動意圖識別方法的基礎上,實現了機械臂的交互控制,并實現了生理控制的康復機器人的應用[18]。此外,項目組還將人類的“大腦—小腦—脊髓—肌肉”的中樞與外周運動神經系統模型引入到機器人的運動規劃與控制當中來,針對仿人的“多輸入-多輸出”機器人運動執行機構,建立了運動信號的類神經編解碼模型,使得機器人可以在運動反應速度不降低的情況下,提高機器人的運動精度,并具備運動的學習能力。項目組建立了生物啟發式仿人視覺演示平臺與生物啟發式仿人運動演示平臺(圖 4),基于人的中樞神經與外周神經機理,實現了在運動中逐步提升精度,而速度不下降的學習過程[19]。
為使類腦機器人具備針對復雜環境下物體的魯棒識別能力,并具有很好的泛化能力,項目組進行了神經啟發式模型的相關研究,將人類的聯想記憶機制、注意力調控機制、泛化學習與記憶機制引入到模型當中。在研究中,項目組首先將聯想和記憶機制引入計算模型HMAX 中,減少識別時的存儲量,加快識別速度,從而提高機器人的反應速度。基于以上工作,依據靈長類動物視皮層中前內顳葉皮層對部件、視角的調節功能以及后內顳葉皮層的多視覺任務處理能力,繼續改進 HMAX 模型,保證了旋轉、遮擋情況下魯棒的識別,擴大機器人認知的適用場景范圍,為機器人個性化服務奠定基礎[20]。
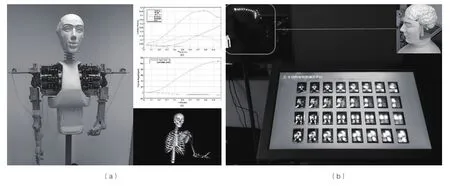
圖4 生物啟發式仿人視覺演示平臺(a)和生物啟發式仿人運動演示平臺(b)
為進一步探索類腦智能機器人的智能生長技術,項目組進一步模擬了嬰兒對物體的自發、動態認知過程,使機器人能夠通過深度置信網絡自發學習,進而實現知識的動態更新,提高機器人的自學習和歸納泛化能力。目前,項目組已經在如下幾個方面取得了積極進展:(1)模仿大腦在單樣本或者極少量樣本條件下的基于交互學習的目標分類能力,借助目前腦科學中腦功能分區、大腦生長與神經連接生長等知識,構建新型類腦機器學習和認知模型,采用特征分析、無監督聚類、合并歸納等推理方法,實現單樣本或極少量樣本條件下同一物體的再次準確識別;(2)在機器人從零學習模型的基礎上,采用語音交互和手勢交互的模式教授計算機目標與環境知識,使得計算機具有從錯誤中學習新知識的能力;(3)在機器人基于交互的錯誤辨識糾正與記憶模型基礎上,構建面向視覺、聽覺、言語感知的多通道信息融合的智能模仿模型,實現計算機借助視聽覺方式對外界環境的智能增長學習,并具有一定模仿人類特定行為的能力(圖 5)。
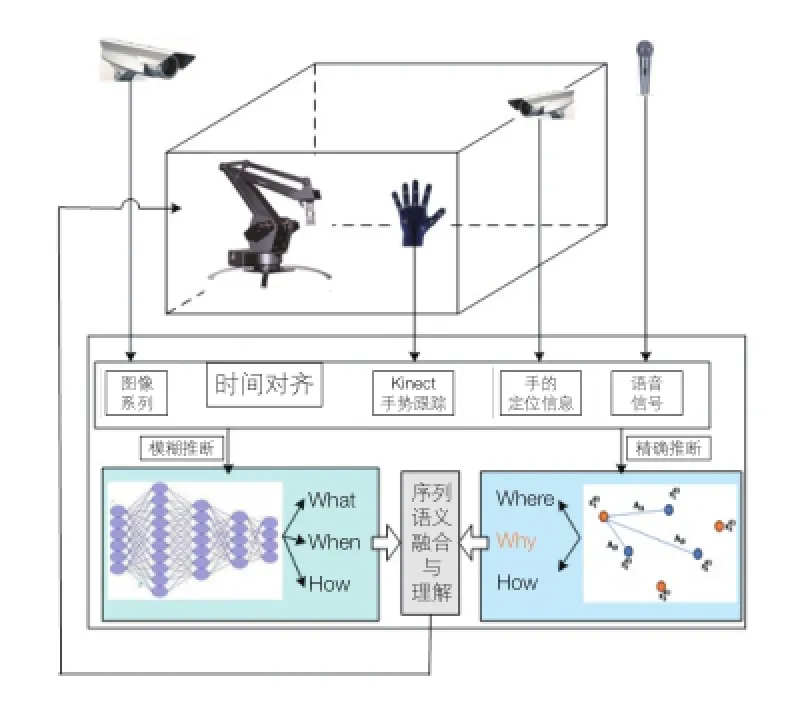
圖5 人機協同的交互式智能手勢動作學習系統
此外,為配合類腦智能機器人的交互過程,使機器人的視覺通道具有更多的擬人特性,項目組還通過類腦視覺感知原理研制了新型三維光場相機(圖 6a),相機能夠自動對感興趣目標進行最佳對焦,從而對注意的圖像內容進行凸顯,從而使機器人能更好地理解所觀察到的內容。與此同時,項目組還研制了具有自學習在線校準功能的仿生雙眼視覺系統(圖 6 b),能模仿人的眼球運動機制,實現雙目攝像機的運動控制,以及雙目視覺跟蹤和三維重建,為基于視覺的機器人人機交互奠定了很好的基礎,并進一步推動了人機協同的機器人智能生長的研究。
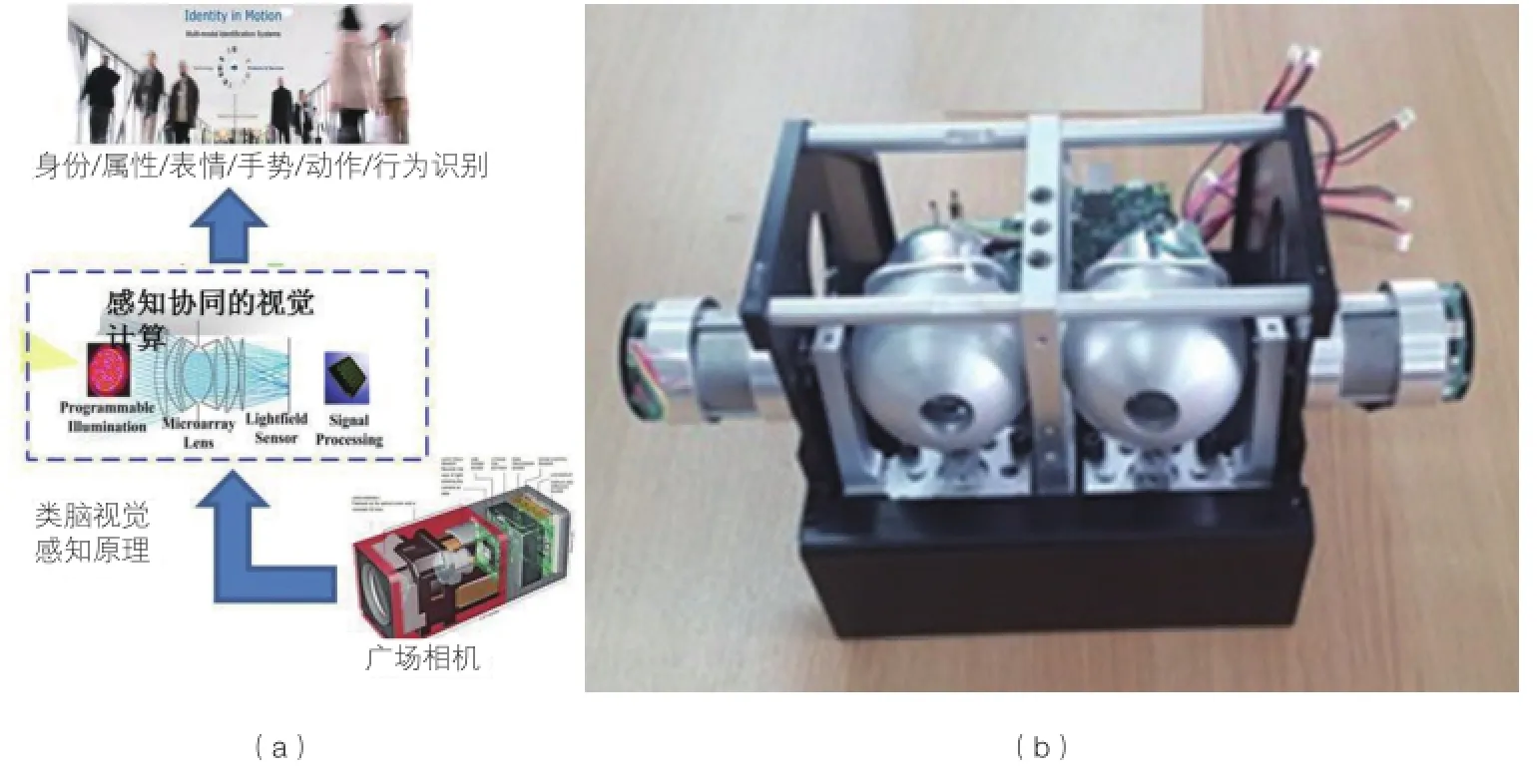
圖6 三維光場相機及其原理示意圖(a)和主動仿生雙眼視覺系統(b)
5 關于類腦芯片與類腦智能機器人研究的進一步思考
由于類腦芯片與類腦智能機器人的研究,既涉及到腦科學和神經科學的最新研究成果,又和傳統芯片設計、機器人仿生結構與控制等內容密切相關,未來研究迫切需要在如下方面進行進一步的攻關。
(1)類腦計算芯片方面。需從不精確、非完整信息的類腦神經計算技術出發,通過提煉神經網絡處理中的共性運算特性,發展類腦神經元計算模型,通過改變控制參數,使相同神經元電路模塊能完成不同的神經元功能,增強神經計算電路模塊的通用性,降低設計、制造的難度。此外,還需要迫切解決類腦計算芯片的功耗問題,需要研究建立神經網絡處理器相關的功耗模型,通過結構設計參數的選擇,降低相對功耗。發展基于統一抽象的、實時可調的軟件抽象層設計,通過和硬件結合,對低功耗設計與評估進行實時反饋和調節,為上層設計提供一個可靠且便利的軟硬件間的橋梁,解決能適應多種應用需求的兼容性問題。
(2)類腦智能機器人方面。需更多借鑒類腦計算模型和仿人運動神經機理研究新的機器人感知、交互和動作計算模型,從根本上提高機器人的智能性,形成具有動態立體視覺感知、快速自感知、多模態信息融合、運動自學習能力、協調人機協作、快速反應和高精度操作的類腦智能機器人。其中,尤其需要解決類人運動執行機構帶來的類腦運動神經控制、人機融合環境帶來的機器人多模態信息融合、交互式學習控制和雙目可動攝像頭帶來的攝像頭高速在線校準 3 個問題。
6 總結
在神經科學和深度神經網絡等領域快速發展的綜合推動下,類腦計算芯片與類腦智能機器人經過最近幾年的發展,獲得了科研人員的普遍重視,并已經產生了一系列研究成果。其中,類腦計算芯片已經形成實際的產品,并有希望在近期產生重要的應用;類腦智能機器人也在研究內容上不斷進行細化和深入,結合神經科學和仿生學等最新的研究成果,已經形成了一系列原型技術,并在類腦智能機器人的自主學習和交互式主動學習機制上形成了一批積極的成果。未來研究有望在仿人運動模型和“自主學習-動作”類人神經運動控制以及在人機協同的智能機器人控制和交互式學習、自適應和自主決策方法等方面取得重大突破。
1 喬紅, 尹劼沛, 李睿, 等. 機器人與神經科學交叉的意義——關于智能機器人未來發展的思考. 中國科學院院刊, 2015,30(6):762-771.
2 唐旖濃.美國類腦芯片發展歷程. [2016-5-21] .http://www. eepw.com.cn/article/271641.htm
3 電子產品世界. 高通 zeroth 認知平臺, 讓手機認識世界. [2015-3-9]. http://www.eepw.com.cn/article/270655.htm
4 Chen T, Du Z, Sun N, et al. Diannao: A small-footprint highthroughput accelerator for ubiquitous machine-learning//ACM Sigplan Notices. New York: ACM, 2014, 49(4): 269-284
5 Chen Y, Luo T, Liu S, et al. Dadiannao: A machine-learning supercomputer//Proceedings of the 47th Annual IEEE/ ACM International Symposium on Microarchitecture. Washington:IEEE Computer Society, 2014: 609-622.
6 與非網.惹高通、IBM、英特爾、惠普四大巨頭關注,神經形態芯片有啥用. [2015-09-29] . http://www.eefocus.com/mcudsp/350954
7 Shahinpoor M. Ionic polymer-metal composites (ipmcs) as biomimetic sensor. Actuators and Artificial Muscles-a Review. Smart Materials and Structures, 1998, (7):15 -30.
8 王煒, 秦現生. 仿肌肉驅動器及其在仿生機器人中的應用. 微特電機, 2009, 37(6): 56-60.
9 ECCEROBOT. [2015-10-25]. http://eccerobot.org/index.html
10 NEST Simulator | The Neural Simulation Tool. [2015-10-25]. http://www.nest-simulator.org/
11 A simulated mouse brain in a virtual mouse body. [2015-10-25]. https://www.humanbrainproject.eu/-/a-simulated-mousebrain-ina-virtual-mouse-bo-2
12 Leigh R. Hochberg, Daniel B, et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature,2012, 485(7398): 372-375.
13 Using thoughts to control airplanes.[2016-5-28]. http://www. tum.de/en/about-tum/news/press-releases/short/article/31531/
14 Wolpaw J R, Birbaumer N, Heetderks W J, et al. Brain-computer interface technology:A review of the first international meeting. IEEE Transactions on Rehabilitation Engineering, 2000, 8(2): 164-173.
15 Mandel Y, Goetz G, Lavinsky D, et al. Cortical responses elicited by photovoltaic subretinal prostheses exhibit similarities to visually evoked potentials. Nature communications, 2013 , 4.
16 人工視覺正在邁出第三步. [2016-5-28]. http://hsb.hsw. cn/2013-09/21/content_8512176.htm.
17 曾毅, 劉成林, 譚鐵牛. 類腦智能研究的回顧與展望. 計算機學報, 2016, 39(1):212-222.
18 Liu S L, Du Z D, Tao J H, et al. Cambricon: An instruction setarchitecture for neural networks//Proceedings of the 43rd ACM/ IEEE International Symposium on Computer Architecture.2016.
19 Qiao H, Li C, Yin P, et al. Human-inspired motion model of upper-limb with fast response and learning ability -A promising direction for robot system and control.Assembly Automation, 2016,36(1): 97-107.
20 Qiao H, Li Y L, Tang T, et al. Introducing memory and association mechanism into a biologically inspired visual model. IEEE Transactions on Cybernetics, 2014, 44(9): 1485-1496.
陶建華中科院自動化所研究員、模式識別國家重點實驗室副主任。國家杰出青年科學基金獲得者,中國計算機學會常務理事,中國人工智能學會理事,中國中文信息學會理事,國家“863”重大項目首席科學家,IEEE TAFFC 期刊指導委員會委員。長期從事人工智能、人機交互等方面研究。研究成果多次在國內外重要學術會議上獲獎,兩次獲得北京市科技進步獎二等獎。主要研究領域包括:人機交互與智能生長、語音技術,情感計算。E-mail: jhtao@nlpr.ia.ac.cn
Tao JianhuaProfessor and the deputy director in National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences. He is also the winner of the National Science Fund for Distinguished Young Scholars, standing committee member of China Computer Federation, Chief Scientist of National High-Tech Research and Development Program of China (“863” Program). Prof. TAO received several awards from important conferences, and won twice the Scientific Technology Advance Award of Beijing municipal government. His research interests includes human-computer interaction and intelligence growth, speech processing, and affective computing. E-mail: jhtao@nlpr.ia.ac.cn
Current Status and Consideration on Brain-like Computing Chip and Brain-like Intelligent Robot
Tao Jianhua1,3Chen Yunji2,3
(1 Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China;2 Institute of Computing Technology, Chinese Academy of Sciences, Beijing 100190, China;3 Center for Excellence in Brain Science and Intelligence Technology, Chinese Academy of Sciences, Shanghai 200031, China)
Brain inspired Intelligence has received more and more attention in artificial intelligence area in recent years. The paper focuses on the research activities on the brain-inspired chips and brain inspired robot (or named as human like robot) which are important parts of brain inspired Intelligence and have played the important roles for recent research of artificial neural network modeling, cognitive computing and perceptual controlling system. The paper also introduces the preliminary achievements of these two technologies within the Strategic Priority Research Program of the Chinese Academy of Sciences. Furthermore, the paper gives some analysis and suggestions for the future research on brain-inspired chips and brain inspired robot.
brain inspired chip, brain inspired robot, human machine collaboration, intelligence growing
10.16418/j.issn.1000-3045.2016.07.009
*資助項目:中科院戰略性先導科技專項項目(B類)(XDB02080000)
** 通訊作者
修改稿收到日期:2016年6 月3日
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
表面工程與再制造(2019年6期)2019-08-24 06:40:04
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
