汽車打包機機構運動與車身變形仿真研究
2016-10-21 06:40:43楊二楓章泳健戴國洪樂云輝
常熟理工學院學報 2016年4期
楊二楓,章泳健,戴國洪,樂云輝
(1.常熟理工學院機械工程學院,江蘇常熟215500;2.江蘇省機電產品循環利用技術重點建設實驗室,江蘇常熟215500)
汽車打包機機構運動與車身變形仿真研究
楊二楓1,2,章泳健1,2,戴國洪1,2,樂云輝1
(1.常熟理工學院機械工程學院,江蘇常熟215500;2.江蘇省機電產品循環利用技術重點建設實驗室,江蘇常熟215500)
針對報廢汽車拆解線工作過程仿真中,汽車打包機所涉及的機構運動及被打包車身不規則變形的聯合仿真要求,分析了汽車打包機工作機構的特點和車身變形仿真的難點,提出了解決仿真難點的兩個方案.通過比較,確定了運用3DS Max軟件完成仿真.在3DS Max中利用“變形器”實現了車身的變形仿真,并運用正、反向運動學原理完成了機構運動的仿真,實現了汽車打包機機構運動與車身變形的聯合仿真.
汽車打包機;3DS Max;變形器;正反向運動學
如果報廢汽車不能得到有效處理,不僅浪費大量可循環利用的資源,也會造成嚴重的環境問題.在各種對報廢汽車進行拆解處理的方案中,目前最新的是通過組建報廢汽車拆解處理線對汽車進行批量化、專業化的作業處理,其一般要經過預處理、流水線拆解和后處理等環節.處理完成后,不僅能獲得各類可供直接回收利用的金屬、非金屬材料,更可獲得可進行再制造或再利用的汽車零部件.為了更好地介紹及推廣這種新工藝,需要對報廢汽車拆解處理線的整個工作過程進行仿真,以向用戶呈現一個動態的可視化的工藝過程.
在對報廢汽車拆解處理線進行仿真的過程中,涉及兩類仿真:一類是運動仿真,一類是變形仿真.同時,仿真過程中,還需要解決運動時序的控制問題,即各個運動的相互連貫和運動與變形的聯合仿真.對于拆解處理線后處理過程中的汽車打包機而言,由于其在工作過程中存在相關機構的機構運動,同時存在被打包車身的壓縮變形,也要通過時序控制保證各個運動之間的協同關系,本文以該典型工位的工作過程仿真為例,介紹了報廢汽車拆解處理工藝的仿真工作.
1 汽車打包機工作原理
汽車打包機是用來對廢舊車身進行打包的專用機械,其工作過程大致分為如下幾個步驟:①放入車身,活動擋板動作,將出口封閉;②門蓋下壓,并到達最終位置,使車身發生豎直方向變形;③左、右壓頭從兩側擠壓,使車身發生橫向變形;④推頭動作,使車身發生一定量的縱向變形;⑤打開擋板,推頭將打包過的車身推出.汽車打包機整體結構及各部分名稱如圖1所示.
在對報廢汽車的后處理過程中,汽車打包機扮演著重要的角色,通過對流水線拆解處理后的剩余車身打包,不僅節省存放空間、便于運輸,也可再對打包后的車身進行剪切,做進一步的處理.在其工作過程中涉及擋板、壓頭、推頭、門蓋等的機構運動,以及置于其中的車身的變形.為了介紹及動態展示汽車打包機的工作過程,本文將研究對其工作過程的仿真.

圖1 汽車打包機
2 仿真技術分析及仿真方案研究
在汽車打包機工作過程中,機構運動的原理較為簡單,是常見的滑動及轉動,但由于機構中的構件比較多,存在多個轉動和滑動連接,因此,整體的機構運動就較為復雜.車身的變形為不規則變形,車身在變形的同時自身也存在相關的機構運動.而且在打包機整個工作過程中,整體的機構運動與車身變形存在同步進行、交叉進行的狀況,因此在仿真的過程中必須實現對機構運動與變形運動的仿真,同時還必須完成對兩種運動的合成運動的仿真,即完成二者的聯合仿真,才能真實地展現出打包機的工作過程.
對于機構運動,應用ADAMS等運動動力學分析軟件或集成型CAD/CAM軟件中的運動仿真模塊均能完成此部分的仿真,而對于不規則變形,由于此類軟件運動仿真中均視構件為剛體,故無法實現變形.使用ANSYS等有限元分析類軟件能進行大變形的計算與仿真,但不僅操作較復雜,而且有限元類軟件無法完成機構運動的仿真.
由于本仿真研究的目的是實現機構運動與變形的聯合仿真,上述仿真方法各有其某方面的優點,考慮到軟件之間耦合和通用性的問題,整體仿真應盡量在同一款軟件中完成.故如何實現物體的不規則變形,如何將機構運動與不規則變形進行聯合仿真,將是本文的研究重點及難點,為此,制定了如下兩套方案,并分析其優劣.
2.1基于物理方法的仿真
基于物理方法的仿真,即基于力與運動及變形之間物理關系的仿真.
基于多剛體動力學分析技術的運動仿真軟件通過構件與運動副的定義將整個機構定義為一個運動鏈,然后結合運動及受力的定義,可組成一個微分或積分方程組(視分析類型的不同),并通過通用數值計算方法進行求解.雖然內部的計算過程非常復雜,但用戶只需要完成機構及運動的定義即可,所以用來進行機構運動的仿真很方便,進行動力學分析不僅可以獲得力的數據,而且可以模擬接觸及碰撞,但由于構件存在剛體假設,所以不能產生變形效果.
結合有限元分析技術的柔體動力學可以分析構件的變形,但由于其變形求解是基于線性理論框架下的模態疊加法,所以其變形效果也僅適用于彈性變形范圍.此類方法如Siemens NX軟件中的Motionsimulation模塊、ADAMS等,對于本文中所涉及的車身在打包過程中的大變形情況是不適用的.
通用動畫類軟件中,也有采用動力學仿真技術的應用模塊,如3DS Max軟件中有一個MassFX動力學模塊,可以定義物體為柔體,使物體產生變形的效果.使用MassFX模塊無法實現機構運動的仿真,也就無法實現機構運動與變形的聯合仿真.
2.2基于幾何方法的仿真
基于幾何方法的仿真,即不涉及力與運動及變形之間物理關系,而僅從幾何的角度出發進行運動與變形的仿真.
一些三維設計軟件具有動畫功能,除了可以較容易實現機構運動的定義與仿真,而且具備模型隨尺寸參數化修改實現變形動畫的功能.如SolidWorks軟件中,可以實現一個物體隨某個或某些尺寸在一定范圍內變化的變形,但車身模型的復雜變形無法通過尺寸參數的修改來實現,所以該功能不適用于本文的車身不規則變形.
通用動畫類軟件中,如在3DS Max軟件中,實現物體的變形非常簡單,其中一種方法是通過添加關鍵幀實現物體的參數化變形.但為了實現不規則變形,可以使用的方法是給其添加“變形器”修改器,然后通過添加關鍵幀的方式實現任意可控的變形[1].
在3DS Max軟件中,對于機構運動,可以通過給機構中各個構件添加關鍵幀的方式使其具有機構運動的整體效果,但在打包機機構的運動中包含著多個轉動、滑動,通過添加關鍵幀方式完成仿真不僅麻煩而且不能完成精確的機構仿真.在此軟件中還有一個“骨骼系統”[1]模塊,其原理是正、反向運動學,即通過建立一定的父子關系,組成正、反向運動關系鏈,實現物體間的約束關系.而且通過添加骨骼系統模塊完成的動畫也是借助于添加關鍵幀,因此就可以通過“關鍵幀”這一共同點將機構運動與車身變形聯系起來,以完成二者的聯合仿真.
綜上所述,本文將采用3DS Max軟件中的“變形器”修改器和“骨骼系統”模塊來完成汽車打包機工作過程的仿真.
3 仿真的實現
3.13DS Max動畫制作原理與方法
在3DS Max軟件中,對于機構的動畫制作一般應用關鍵幀動畫制作方法,并結合各種控制器進行效果控制.其中主要有三種思想:其一是采用各個模型分別制作動畫,然后再進行組合,結合到一個場景中,達到模擬現實的效果;其二是應用正向運動學的方法,建立父子關系,完成動畫;其三是應用反向運動學的方法,使父子關系顛倒,通過各種約束關系,完成動畫[2,3].
3.2變形仿真的實現
首先,需復制出多個車身模型.對各個模型添加“編輯多邊形”修改器,使各個模型沿前后左右等不同方向發生單個單向變形.如圖2(a)所示.之后,將這些車身模型添加到初始模型的變形器修改器下的不同通道里.然后只需調整不同通道的變形百分比數值,即可實現初始模型的任意變形.其中一種變形如圖2(b)所示.最后,通過給初始車身模型添加關鍵幀,就可以完成車身的變形仿真動畫.

2變形車身模型
3.3門蓋機構運動仿真的實現
本文中將如圖1中編號4、6所示的打包機主體、門蓋及門蓋液壓缸視為骨骼系統,在這個系統中,所有部件共同組成一個封閉的運動鏈,打包機主體、門蓋及門蓋液壓缸缸桿、液壓缸缸筒組成一個四連桿機構,可將其視為一個搖桿滑塊機構.在這個機構中,根據機構運動特點,可視門蓋是一個運動整體,門蓋液壓缸是一個運動整體,打包機主體視為機架,故此機構中主要包含兩個運動,門蓋液壓缸的運動和門蓋的旋轉運動.其中運動關系較為復雜的是門蓋液壓缸的運動,其既有缸頭與門蓋連接處的旋轉、缸桿在缸筒內的滑動,又有缸筒繞其前部轉軸相對于打包機主體的旋轉.
根據骨骼系統中的正、反向運動學的原理可知,單純由正向或反向運動學關系構成的運動鏈都是一個獨立的運動鏈,無法形成一個封閉的運動鏈.針對門蓋的機構特點,即一個封閉的四連桿機構,故需采用結合正、反向運動學的方法,同時構建正、反向運動鏈,使其能組成一個封閉的運動鏈.
在門蓋機構的運動中,門蓋的旋轉運動較為簡單,此處選擇運動關系較為簡單的正向運動學原理來完成此運動關系的建立.對于較為復雜的門蓋液壓缸的運動,同時也為了組建封閉的運動鏈,選擇可以實現較為復雜運動關系定義的反向運動學原理完成此運動關系定義.打包機主體,作為此四連桿機構中的機架,其不發生運動,根據正、反向運動學的原理,可將打包機主體作為兩條運動鏈的共同父物體.
3.3.1正向運動鏈的建立
在正向運動學中,父物體移動將帶動子物體共同移動,而子物體自身的移動或轉動將不會引起父物體的運動.本文中將如圖3所示的門蓋、打包機主體視為一個正向運動系統.將打包機主體鏈接為門蓋的父物體.
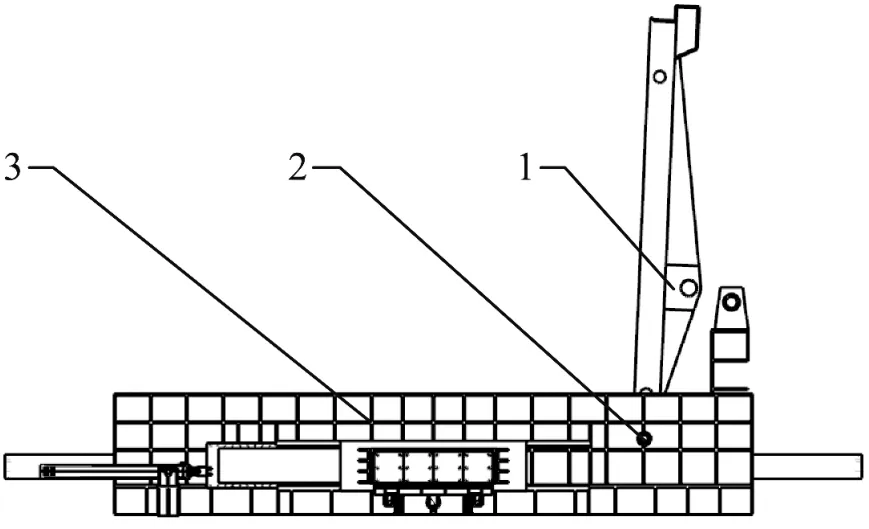
圖3 打包機中的正向運動學關系
正向運動鏈建立完成后,只需給門蓋添加相應的關鍵幀,便可以實現其繞與打包機主體聯接轉軸的旋轉仿真動畫.
3.3.2反向運動鏈的建立
反向運動學(Inverse Kinematics)在3DS Max的動畫制作過程中扮演著重要的角色,其可以通過兩種方法來完成動畫的制作,一種是“交互式IK”,另一種是“IK解算器”[4].根據門蓋液壓缸運動的特點,及為了實現精確的機構運動仿真,本文選用具有運動約束關系定義的交互式IK的方法完成相關機構的運動仿真,如圖4所示,以門蓋液壓缸缸頭為基本子物體,將液壓缸缸頭、液壓缸缸桿、液壓缸缸筒、打包機主體,進行依次鏈接,鏈接為IK運動鏈.
在IK鏈建立時需定義父子鏈接時的相互關系,即子物體相對于父物體的運動關系,每個運動關系包括三個方向的滑動約束和三個方向的旋轉約束.其中這些約束的定義均以其父物體的局部坐標系為參照.在圖4所示的IK鏈中,打包機主體作為液壓缸缸筒的父物體將限制其只有繞二者之間轉軸的旋轉運動.液壓缸缸筒作為液壓缸缸桿的父物體將限制其只有一個沿缸筒軸向的滑動.液壓缸缸頭和液壓缸缸桿之間沒有相對運動,將他們之間的自由度全部約束.
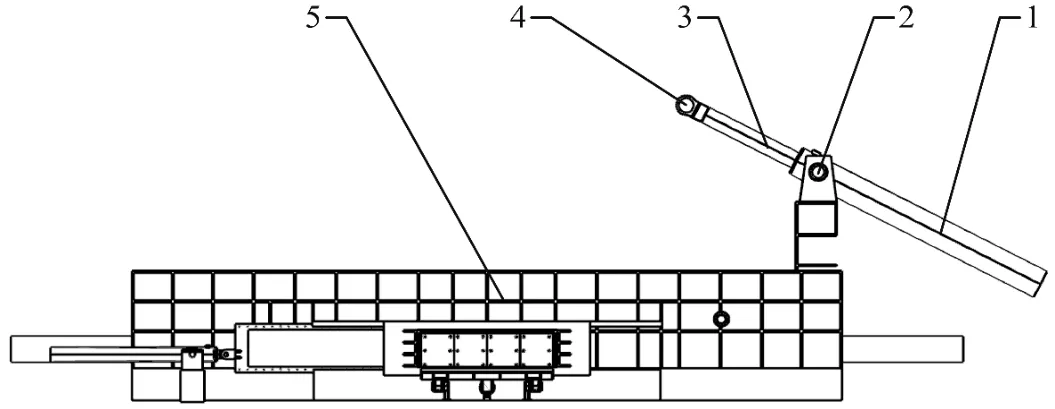
圖4 打包機中的反向運動學關系
3.3.3門蓋機構整體仿真的完成
正、反向運動鏈建立之后,二者互相獨立,為完成整體動作,需將二者進行連接.由于在正、反向運動學中,一個物體只能有一個父物體,在門蓋機構中,門蓋和門蓋液壓缸缸頭需進行連接,而二者都已經存在父物體,故需建立一個額外的物體才可將兩個運動鏈連接在一起.此時可在液壓缸缸頭處建立一個虛擬體,將其Bind(綁定)到缸頭上,同時,將其作為子物體鏈接到門蓋和缸頭的旋轉軸處[5].在實際的工作過程中,此封閉運動鏈的驅動件為門蓋液壓缸,但在仿真過程中此運動鏈的定義具有其特殊性.門蓋液壓缸作為一個IK鏈,其運動只能通過對其末端子物體(液壓缸缸頭)添加關鍵幀才能實現.而缸頭作為此IK鏈的末端子物體,其通過中間虛擬體與門蓋相連.虛擬體作為門蓋的子物體,在給門蓋添加運動關鍵幀之后也將具有與門蓋運動相關聯的關鍵幀,而缸頭作為虛擬體的綁定體也就具有了相應的關鍵幀,此時在3DS Max中的交互式IK環境下,點擊“應用IK”按鈕,軟件將自行為整個IK鏈中的各個構件添加關鍵幀.至此,門蓋的整個動作過程得以仿真完成.
3.4仿真的合成及動畫輸出
如上所述,打包機工作過程中的車身變形、門蓋運動仿真動畫已經分步完成,剩余的是如圖1中編號1、2、5所示的推頭和左右壓頭的機構運動仿真動畫,這些部分的動畫只需給其添加關鍵幀即可完成.
在3DS Max軟件中,利用關鍵幀動畫制作方法,將獨立完成的機構運動與車身變形仿真各自的動畫關鍵幀置于同一條時間軌跡欄之上,通過調節關鍵幀相互之間的時序關系,可以實現機構運動與車身變形的相互配合與連貫運動,即實現機構運動與車身變形的聯合仿真,仿真的實現可以展示出汽車打包機真實的工作過程,并展示出由于相關機構的運動導致的車身變形,以及兩種運動的同步、交叉運動情況.
動畫輸出之前,給打包機各部分添加相應的材質與燈光,使其更具有真實感,最后,渲染輸出即可.
4 結論
本文以報廢汽車拆解處理線后處理過程中的汽車打包機為研究對象,介紹了打包機的工作過程,分析了其機構特點及運動特征,并對仿真過程中的重點及難點做了分析.分變形和機構運動兩部分對打包機工作過程仿真動畫的制作做了介紹.此仿真的完成,解決了機構運動與不規則變形的聯合仿真問題,通過仿真展現了打包機真實的工作過程,本文對汽車打包機工作過程的仿真研究,對機械運動仿真中涉及運動與變形的仿真提供了借鑒.
[1]陸平,陳熙,等.計算機三維動畫制作教程—3DS Max[M].北京:人們郵電出版社,2010:233-332.
[2]IBRAHIM ZEID.Mastering CAD/CAM[M].America:McGraw Hill Higher Education,2007:324-572.
[3]田松,孔建益,楊金堂,等.基于3DS Max的機構動畫仿真[J].湖北工業大學學報,2006,21(3):162-164.
[4]陶麗,佟鳳義.3DS Max9三維動畫制作典型案例[M].北京:清華大學出版社,2008:250-251.
[5]馬正龍,鄒淑平,.基于3DSMax的液壓支架三維虛擬仿真[J].山東煤炭科技,2011,(6):103-104.
Thesimulation Research on the Mechanism Motion and the Deformation of Vehicleshell of Vehicle Packing Machine
YANG Erfeng1,2,ZHANG Yongjian1,2,DAI Guohong1,2,LEYunhui1
(1.School of Mechanical Engineering,Changshu Institute of Technology,Changshu 215500;2.Jiangsu Key Laboratory of Recycling and Reusing Technology for Mechanical and Electronic Products,Changshu 215500,China)
Aiming at the unitedsimulation requirement of mechanism motion and irregular deformation of vehicleshell related to the working process of vehicle packing machine during the working processsimulation ofscrap vehicle disassembling line,the characteristics of the working mechanism of vehicle packing machine were analyzed,the difficulties of thesimulation of mechanism motion and deformation of vehicleshell were researched,and twosolutions were presented tosolve the difficulties of thesimulation.Then 3DS Max was chosen to accomplish thesimulation after comparison.In this paper,the method of making deformationsimulation of vehicleshell by using morpher was introduced,and thesimulation of mechanism motion was accomplished by applying the forward and inverse kinematics theories.The co-simulation of the mechanism motion and the deformation of vehicleshell of vehicle packing machine were realized at last.
vehicle packing machine;3DSMax;morpher;forward and inverse kinematics
TP391.41
A
1008-2794(2015)04-0042-05
2015-06-11
江蘇省產學研前瞻聯合研究計劃項目“廢舊汽車拆解工藝系統及關鍵技術研究”(BY2015043-03)
戴國洪,教授,博士,研究方向:數字化制造工藝與裝備、機電產品循環利用技術,E-mail:dgh@cslg.edu.cn.
猜你喜歡
小哥白尼(趣味科學)(2021年12期)2021-03-16 05:40:38
小學科學(學生版)(2020年10期)2020-10-28 07:52:18
中華詩詞(2020年1期)2020-09-21 09:24:52
文苑(2019年22期)2019-12-07 05:28:56
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
新聞傳播(2018年3期)2018-05-30 07:01:39
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
學生天地(2016年9期)2016-05-17 05:45:06
