基于MEMS傳感器的車載組合定位系統設計
2016-10-21 06:40:45李鑫孟翔飛王燚
常熟理工學院學報 2016年4期
李鑫,孟翔飛,王燚
(常熟理工學院電氣與自動化工程學院,江蘇常熟215500)
基于MEMS傳感器的車載組合定位系統設計
李鑫,孟翔飛,王燚
(常熟理工學院電氣與自動化工程學院,江蘇常熟215500)
車載組合定位是現代汽車常用的定位方式,它通過集成化的傳感器及衛星定位系統,實時定位車輛位置,在現代錯綜復雜的城市交通中有著廣泛的應用.本文以微小型車載組合定位系統為對象,設計了基于ARM嵌入式系統的微小型車載組合定位系統,借助MEMS傳感器設計的慣性導航系統、GPS導航及相應的融合算法,實現對車輛的實時高精度的定位.
車載組合定位系統;嵌入式系統;MEMS傳感器;卡爾曼濾波
車輛定位系統的應用及智能交通系統(ITS)的發展[1-3],為道路行車提供了最優的選擇路線,給人們出行提供了極大的便利.車載組合定位系統是采用車載傳感器進行組合定位的實時系統,其原理是利用車輛安裝的捷聯慣性導航系統(SINS),并利用GPS數據對其進行校正,達到最優定位的效果.隨著MEMS技術的發展,以MEMS加速度計及MEMS陀螺儀為慣性測量單元的車載捷聯慣性系統得到了廣泛的應用.較之傳統的車載組合定位系統,基于MEMS傳感器的車載組合定位系統,具有結構簡單、易于安裝、功耗低及可靠性高等優點,目前已成為車載組合定位系統的研究熱點,得到了很多學者的關注.
1 系統總體結構
車載組合定位系統是一個復雜的系統,包括傳感器的數據采集處理,實時數據融合,并需要完成系統測試及分析.圖1為車載組合定位系統總體方案結構圖.
首先,系統根據串行通信采集GPS數據,得到ASCII碼形式的導航數據,再利用集成在處理器中的解析程序,得到可用數據格式的導航報文,并將其作為SINS的參考定位信息.MEMS傳感器采用IIC通信采集,得到車載條件下的車輛加速度及車輛運動角速度.結合航位推算原理,計算SINS的推算定位點,同時利用慣性定位平臺姿態確定原理計算車體三軸姿態角,將其作為航位推算的坐標轉換矩陣,提高SINS推算精度.當系統解析出GPS數據及SINS定位數據之后,采用基于最小方差原理的卡爾曼濾波實現車載組合定位系統的最優定位,并通過串行通信總線發送數據到ARM嵌入式軟件平臺上,實時顯示當前車輛位置.
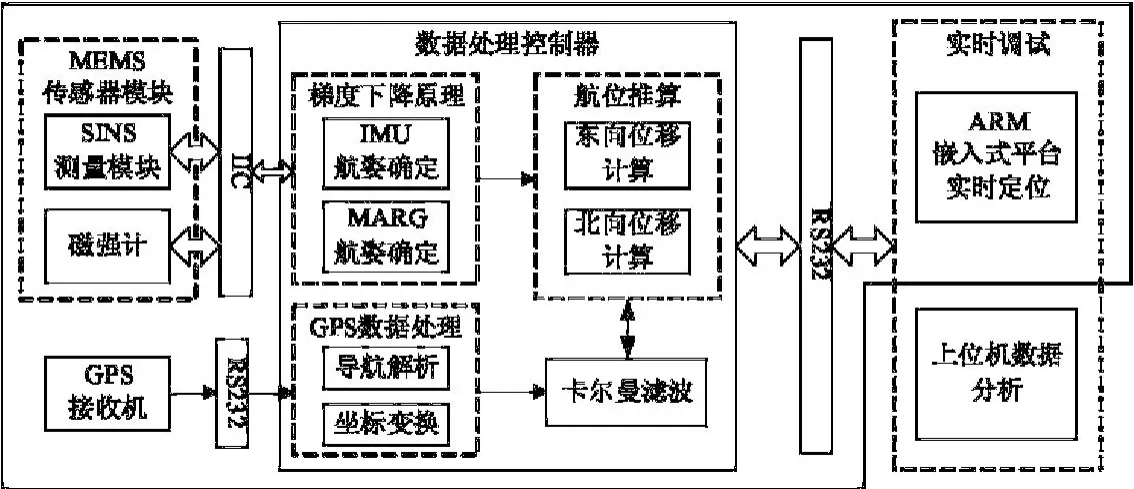
圖1 系統結構框圖
2 系統硬件電路設計
2.1控制器模塊電路設計
本系統采用ST公司的STM32F103VET6芯片為控制核心,這是一款基于ARM Cortex-M3內核的控制器,具有豐富的片上外設.內部集成512 K Flash存儲和64K RAM存儲,CPU主頻最高可達72 MHz,具有輸入捕捉、輸出比較和PWM輸出功能,內部集成16路12位AD采樣、兩通道12位DA輸出以及多種總線通信方式,其豐富的IO資源也為本設計提供了便利[4].它所具有的低功耗模式更是為便攜式設備的設計提供了幫助.控制器最小系統設計如圖2所示.
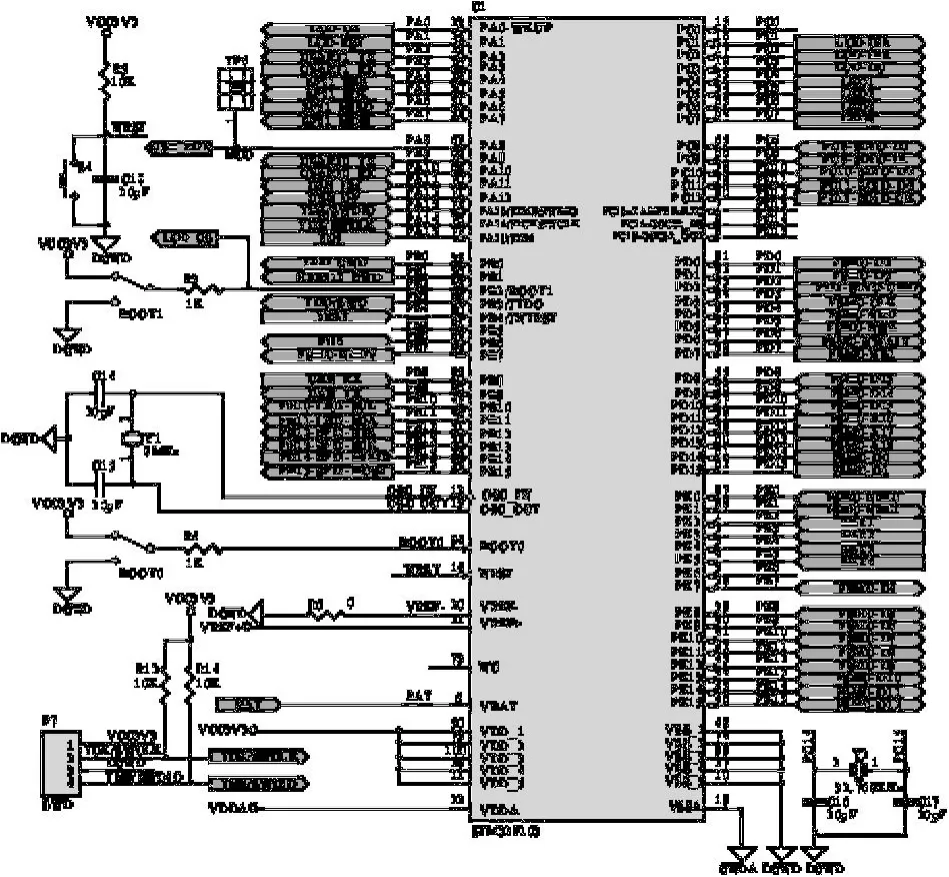
圖2 系統控制核心電路
由于STM32內部集成了512 K FLASH存儲器及64 K RAM存儲器,為小型操作系統的移植帶來了方便.在設計過程中,可以無需擴展FLASH和RAM就可以滿足移植需求,減小了開發難度,降低了開發成本,為系統設計提供了方便.
2.2數據采集模塊電路設計
2.2.1MEMS加速度計電路設計
根據所選型號的MEMS加速度計,參照其給出的參考電路可知,加速度計模塊硬件設計部分主要需要完成加速度計正常工作時的電路設計,包括通信接口,供電方式和硬件濾波部分.加速度計硬件電路設計如圖3所示.
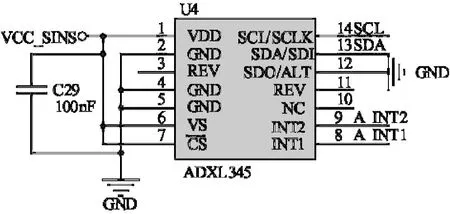
圖3 ADXL345硬件電路
圖3中,電容C29為電源端的去耦電容;SCL與SDA為IIC通信端口,負責傳輸載體當前加速度信號;INT1及INT2分別為兩個中斷源,用于指示處理器當前采樣數據是否已更新.
2.2.2磁強計電路設計
磁強計模塊硬件設計包括通信接口設計,供電方式設計及硬件濾波電路設計三部分,具體的硬件電路如圖4所示.
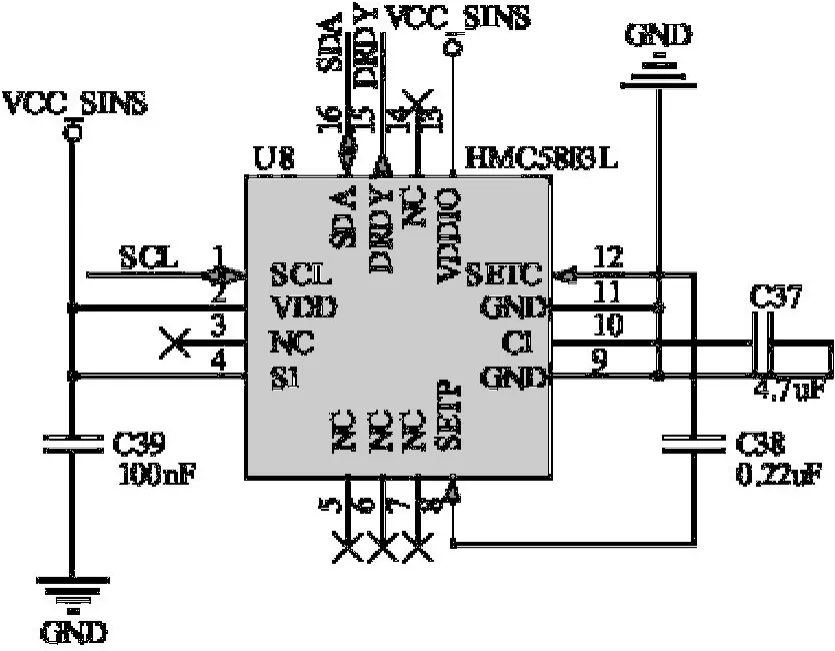
圖4 磁強計硬件電路
圖4中,電容C39為電源端去耦電容,電容C37為芯片存儲電容,C38為SR電容,信號線SCL和SDA分別為IIC總線的時鐘線及數據線,信號線DRDY為數據更新中斷,采用內部上拉.整個供電電路采用線性穩壓器件,可以使其工作電壓保持恒定,減小電源紋波對傳感器測量精度的影響.
2.2.3陀螺儀電路設計
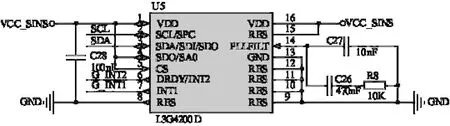
陀螺儀模塊硬件設計包括通信接口設計,供電方式設計及硬件濾波電路設計三部分,具體的硬件電路圖如圖5所示.
3 系統軟件設計
系統軟件總體流程主要是系統運行過程中,軟件的執行規則.本設計中,除操作系統自身創建的空閑任務與統計任務外,其余任務均為與設計直接相關的操作.其中系統初始化任務是系統創建的第一個用戶任務,負責系統初始化功能,并創建其他任務,優先級最高.數據采集、數據處理、參數顯示、數據發送任務優先級依次降低.
設計中采用信號量的方式實現任務間通信,可以達到在未收到信號量的情況下放棄CPU使用權,將使用權交給其他任務,提高系統的實時性.同時結合圖形控制模塊,將實時地圖顯示到系統LCD上.結合板載供電系統實現整個系統的穩定運行.系統軟件流程圖如圖6所示.
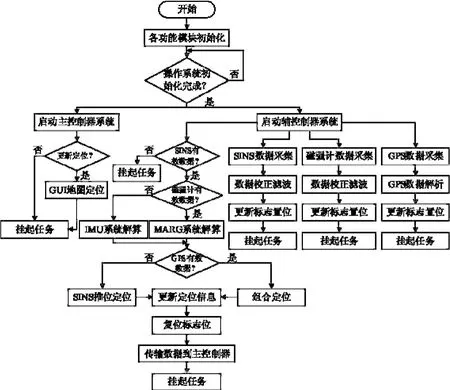
圖6 系統軟件流程圖
3.1加速度計驅動程序設計
加速度計軟件驅動程序設計流程圖如圖7所示.
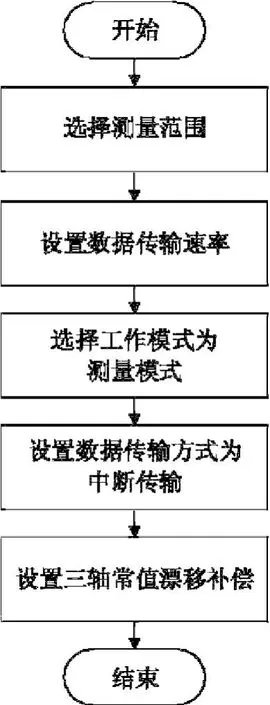
圖7 加速度計ADXL345驅動程序流程圖
(1)在設計加速度計軟件驅動程序時,首先要選擇其測量范圍,根據載體實際所處的環境可以設置相應的測量范圍為:±2g,±4g,±8g,±16g,其測量精度均為13位,本設計中采用±2g測量范圍.量程選定之后就需要設置加速度計的工作模式,ADXL345擁有低功耗設置,在不使用加速度計采集時,可將加速度計設置為睡眠模式,降低系統功耗.本設計中為方便測量,將其設置為測量模式,即加速度計一直處于采集狀態.在數據傳輸方式上,ADXL也有中斷方式及FIFO方式,設計中為節省系統資源采用中斷方式采集加速度計數據.ADXL345加速度計采用二進制補碼數據格式,在實際使用中還需要將其作相應的轉換才能得到所需的加速度值,由于器件本身的缺陷,導致輸出數據時常出現臨界跳變,在軟件設計中也需要做相應的分辨算法,剔除無用數據.由于常值漂移的存在,還可通過設置ADXL345的偏移寄存器,補償常值漂移.
3.2磁強計驅動程序設計
磁強計HMC5883L初始化軟件流程如圖8所示.
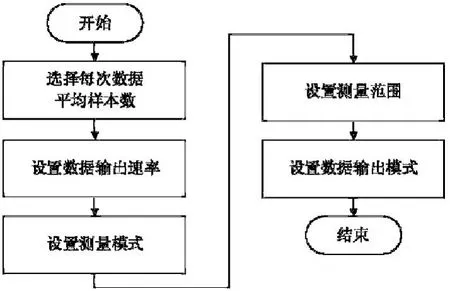
圖8 磁強計HMC5883驅動程序流程圖
由于芯片內部自帶的數據處理功能,可以選擇數據在輸出時的采樣樣本數,達到初步均值濾波,芯片提供的最大采樣樣本數為8,在此為提高輸出速率,選擇直接采樣輸出,即采樣樣本數設置為1;本設計中采用連續數據輸出的方式,輸出速率設置為50 Hz,其測量范圍設置為±1.3 Ga,最小分辨率為±0.917 mGa.
3.3陀螺儀驅動程序設計
L3G4200D軟件初始化流程圖如圖9所示.
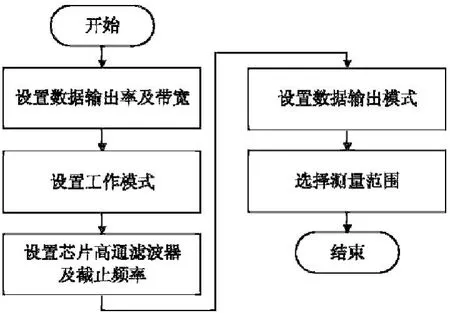
圖9 陀螺儀L3G4200D驅動程序流程圖
MEMS陀螺儀初始化配置程序主要完成陀螺儀的初始配置,首先是設置數據采樣率,即數據輸出率,同時需要設置信號帶寬及截止頻率.然后設置其工作模式,在此可以有多重模式可選.對于本設計,主要設置為正常工作模式.接下來需要完成芯片內部高通濾波器的配置,同時還需設置相應的截止頻率.在數據輸出上主要有連續采樣及中斷輸出模式,在此為提高系統效率,采用中斷采樣模式.最后選擇測量范圍,即可完成初始化配置.
4 GPS/SINS信息融合
GPS與SINS定位信息融合包含兩部分內容,首先是根據GPS定位及SINS定位特點建立系統模型,根據系統模型建立卡爾曼濾波器實現定位信息的融合.
4.1組合定位系統模型建立
采用機動載體的“當前”統計模型來描述車輛運動過程中的統計分布[5,6],這種模型的優越性在于加速度取值范圍有一定的約束,當某時刻車輛以某一加速度運動時,它在下一時刻的加速度值只能在該時刻加速度值的鄰域內,可用如下公式表示:

由于系統采用二維地圖,在實際測量中高度信息將無法表示,故選取組合定位系統的狀態變量為,其中xe、xn分別為車輛東向和北向位置分量;ve、vn分別為車輛東向和北向速度分量;ae、an分別為車輛東向和北向加速度分量.以此狀態變量可以得到系統連續時間模型:
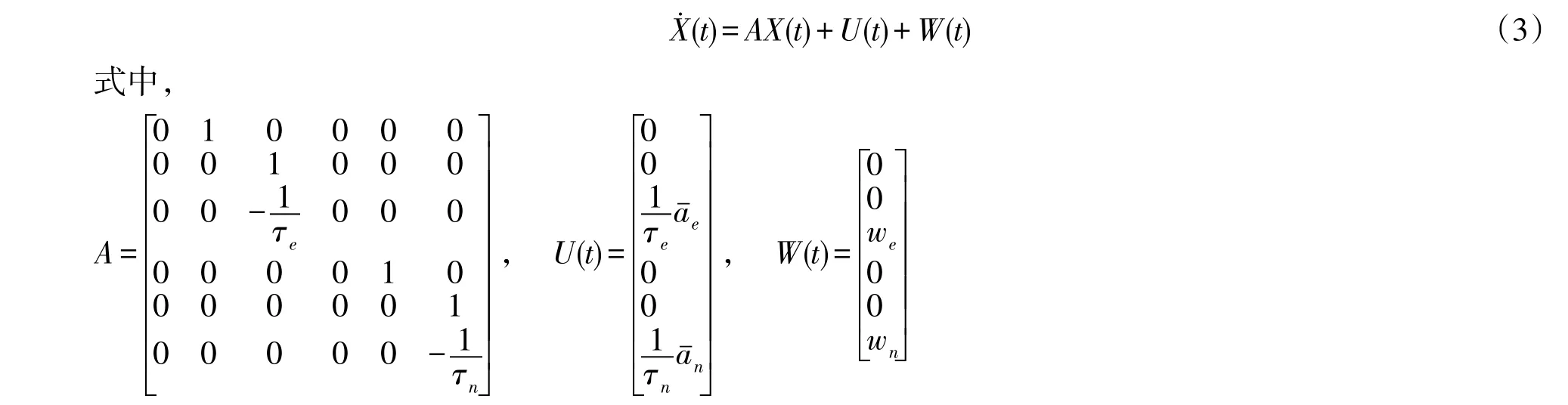
其中we、wn分別為東向和北向加速度零均值高斯白噪聲,方差為分別為東向和北向加速度變化率的相關時間常數;分別為車輛東向和北向加速度分量的“當前”均值.
則實際系統觀測方程可表示為:

ve、vn分別是GPS輸出的東向和北向位置觀測噪聲,可近似為均值為零,方差分別為的高斯白噪聲;εe、εn分別為SINS輸出的東向和北向位置觀測噪聲,可近似為均值為零,方差為的高斯白噪聲.
假設系統采樣時間常數為T,將系統狀態方程與觀測方程離散化:

4.2組合定位系統卡爾曼濾波
根據卡爾曼濾波遞推方程以及上述建立的GPS/SINS組合定位系統的狀態方程和觀測方程,可得到系統遞推濾波方程如下[7-9]:
(1)離散卡爾曼濾波器時間更新方程

(2)離散卡爾曼濾波器量測更新方程

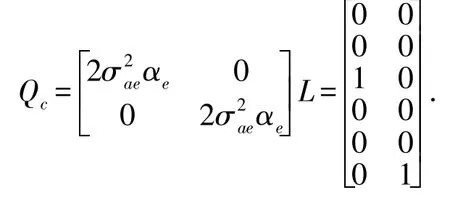
其中R(k)與Q(k)分別為:
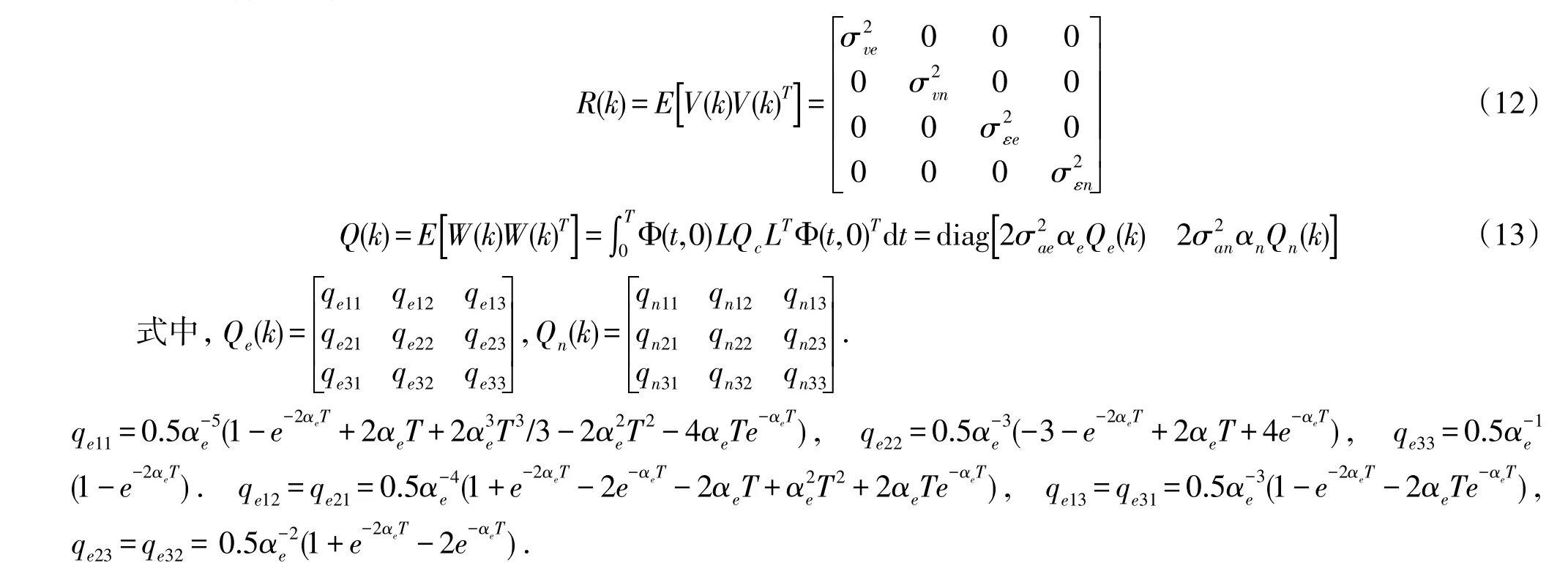
由上述過程即可得到卡爾曼濾波所需的所有參數,當設定初始P0和初始狀態X0后,再由車輛系統實際的特性,設定相應的Q(k)與R(k)即可實現系統實時融合定位,下面假設車輛以初始速度ve=10 m/s、vn=10 m/s沿任意方向運動,根據上述模型及誤差,選擇濾波參數如下:

采用上述初始數據進行Matlab仿真實驗,得到GPS定位與SINS定位相對于真實位置的誤差,如圖10、圖11所示.
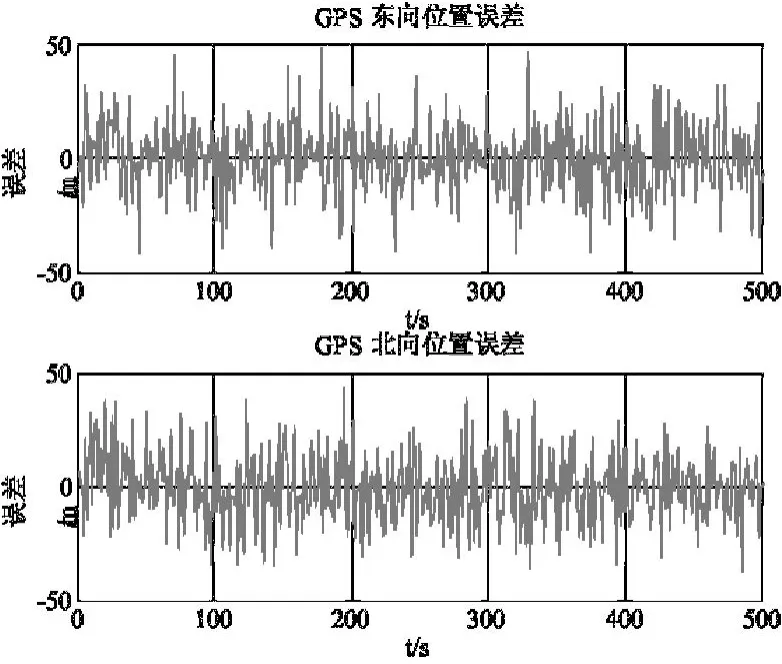
圖10 GPS定位誤差圖
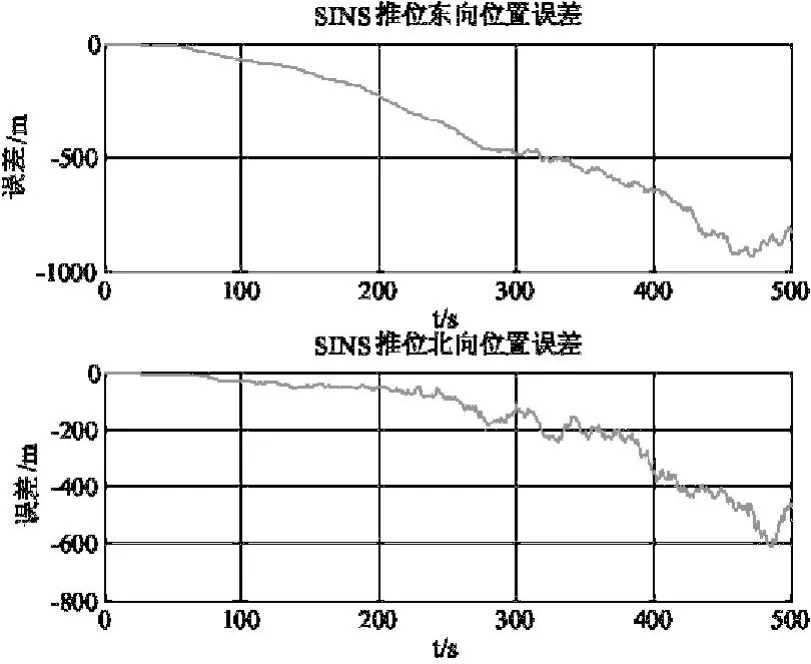
圖11 SINS推位誤差圖
采用卡爾曼濾波融合之后,得到融合后的位置誤差如圖12所示.
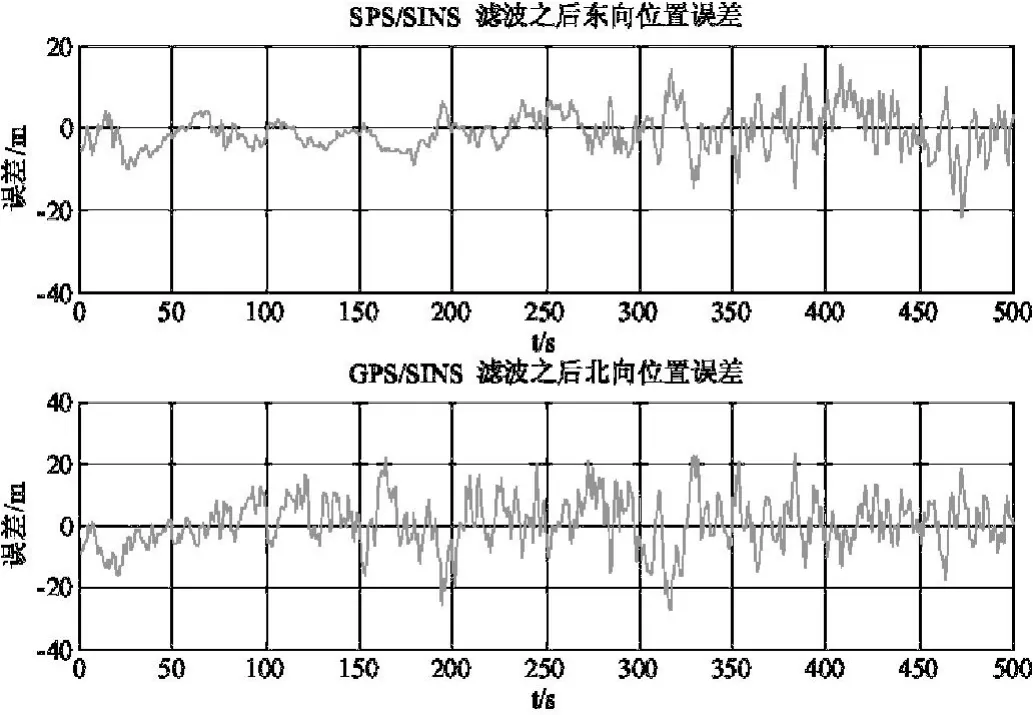
圖12 GPS/SINS融合之后定位誤差圖
為比較組合前與組合后的定位精度,采用標準差與誤差均值進行表示,可以得到如表1所示的定位誤差統計比較結果:
表1中,Em、Nm分別表示東向和北向誤差均值;Es、Ns分別為東向和北向誤差標準差.從上面分析可以看出由于MEMS傳感器精度較差,同時存在數據采樣截取精度及采樣時間不準等誤差,導致直接使用MEMS傳感器的推位誤差遠大于GPS定位誤差,但是在短時間內利用MARG系統航向漂移幾乎為零的優勢可以減小SINS定位誤差,同時結合GPS融合算法可以將單純使用GPS定位精度提高為原來的一倍左右,實現了GPS與SINS定位融合.
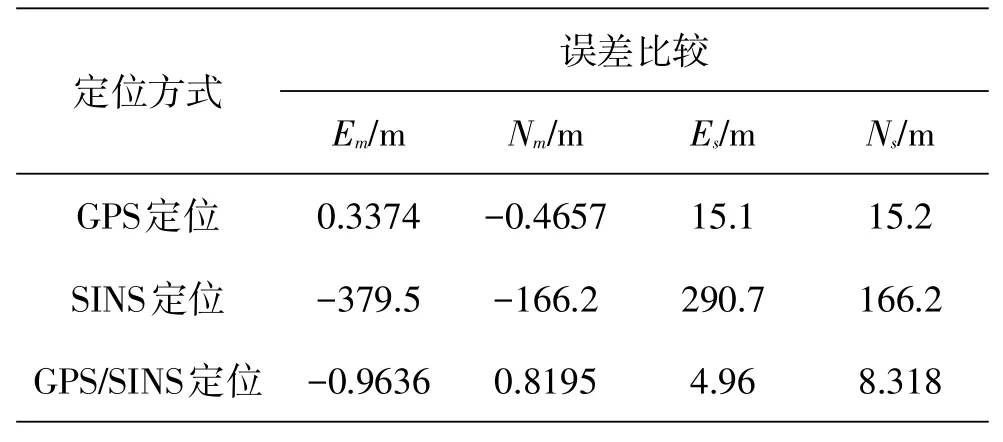
表1 定位誤差統計比較結果
5 實際跑車實驗
通過上面所有系統功能測試之后,確定系統各部分都處于正常工作狀態下,對系統進行實地跑車實驗,開啟系統數據記錄功能,將實時采集數據及解算之后的定位數據記錄到系統SD卡模塊.車輛啟動后以20 km/h、30 km/h以及40 km/h的速度沿校園勻速運動,測得車載組合定位系統實際運行效果圖如圖13所示.
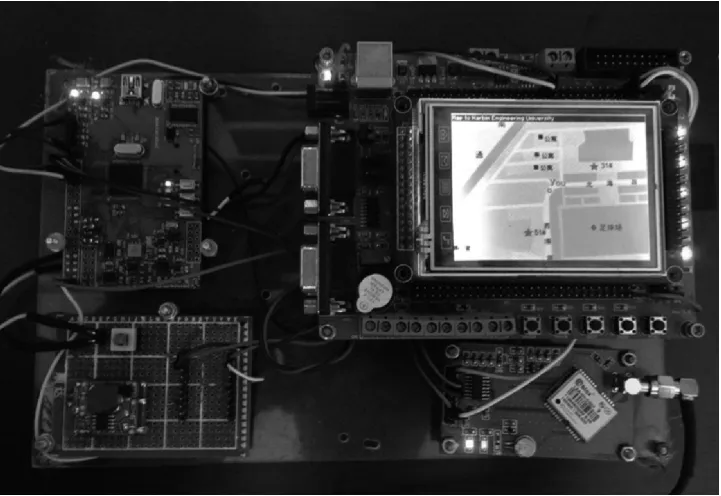
圖13 車載組合定位系統實際運行效果圖
通過上述跑車實驗,對解算的定位數據采用Matlab再現,在繞學校多圈的測試過程中,得到如圖14所示的定位信息連線圖.
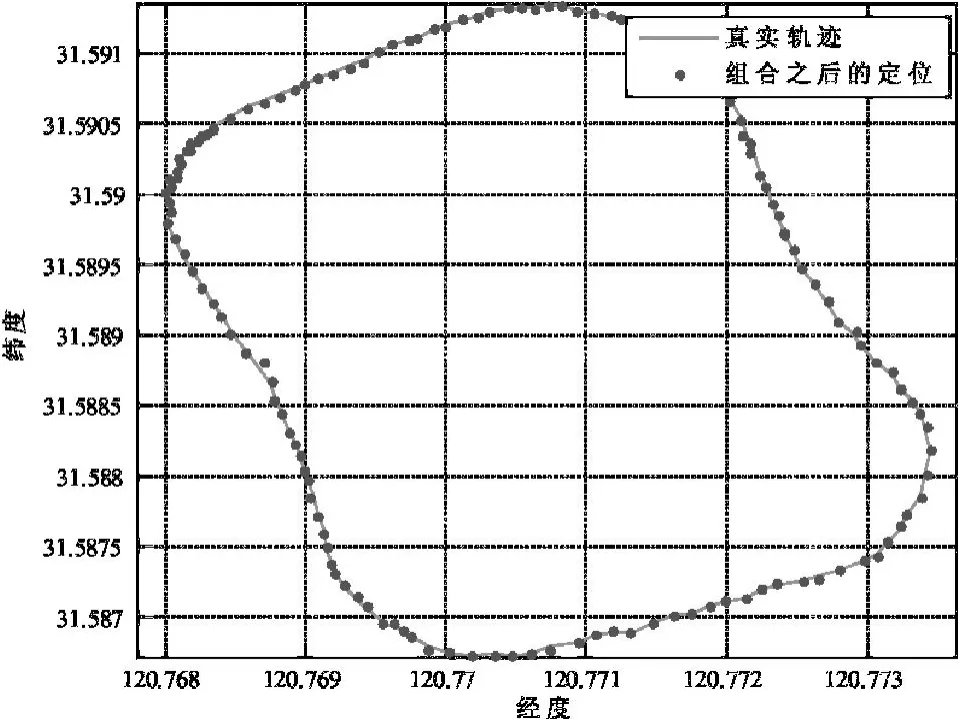
圖14 采集數據Matlab繪制軌跡圖
通過對測得的數據進行分析,當行駛速度為30 km/h時,組合導航的定位精度可以控制在8m范圍內,而隨著行駛速度的增加,其定位精度有所降低,當行駛速度為40 km/h時,系統定位精度可以控制在8.5 m范圍內,滿足了系統設計的目標.
6 總結
本文以基于MEMS慣性傳感器的車載組合定位系統設計為課題,以提高車載組合定位精度為目標,設計了基于MEMS慣性傳感器與GPS組合定位的定位方式.并測試了系統的測量精度,滿足了設計要求.
[1]王笑京,沈鴻飛,汪林.中國智能交通系統發展戰略研究[J].交通運輸系統工程與信息,2006,6(4):9-12.
[2]ELIZABETH DEAKIN,KAREN TRAPENBERG FRICK,ALEXANDERsKABARDONIS.Intelligent Transportationsystem:Linking Technology And Transport Policy To Helpsteer The Future[J].Access,2009(34):29-34.
[3]ORESTE ANDRISANO,ROBERTO VERDONE,MASAO NAKAGAWA.Intelligent Transportationsystems:The Role of Third-Generation Mobile Radio Networks[J].IEEE Communications Magazine,2000(9):144-15.
[4]STM32F103xCsTM32F103xDstm32F103xE Re-ference manual[Z].USA:STMicroelectronics Inc,2011.
[5]付夢印,鄧志紅,張繼偉.Kalman濾波理論及其在導航系統中的應用[M].北京:科學出版社,2003,10:85-93.
[6]鄧自立.最優估計理論及其應用[M].哈爾濱:哈爾濱工業大學,2005:9-23.
[7]BRIAN D,ANDERSON O,JOHN B.Optimal Filtering[M].Prentice-Hall Inc.1979:105-115.
[8]MOHINDERs.GREWAL,ANGUS P.Andrews.Kalman Filtering:Theory and Practice Using MATLAB[M].John Wiley&Sons,Inc,2001:116-121.
[9]DANsIMON.Optimalstate Estimation[M].John Wiley&Sons,Inc,2006:123-129.
A Design of Vehicle Integrated Positioningsystem Based on MEMSsensors
LI Xin,MENG Xiangfei,WANG Yi
(School of Electric and Automatic Engineering,Changshu Institute of Technology,Changshu 215500,China)
Vehicle Integrated Position is an effective method for modern positioningsystem.It provides the realtime and accurate position for cars with the help of integratedsensors and global positioningsystem.Thus,it has been widely used in the intricate urban transport.In this paper,in order to improve the positioning accuracy of the Vehicle Integrated Positioningsystem,an ARM-based miniature Vehicle Integrated Positioningsystem was designed,which is based on MEMS inertialsensors and GPS.Besides,some infusion algorithms were designed for the Vehicle Integrated Positioningsystem,which improves the accuracy of the designedsystem.
Vehicle Integrated Positioningsystem;Embeddedsystems;MEMSsensors;Kalman filter
TP23
A
1008-2794(2015)04-0051-07
2016-05-30
李鑫,實驗師,碩士,研究方向:計算機先進控制技術與現代檢測技術,E-mail:lixin_cx@163.com.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
