即插即用
2016-10-21 00:18:26
新潮電子 2016年10期
日前,英特爾的實感技術終于以逐漸成熟的模塊方式推出,且被取名為“Euclid”。除了不同用途(距離、識別度)的產品線更為豐富外,最為可貴的便是該模塊可以即插即用,實現跟隨與避障。這樣的革新將產生怎樣的推進力?實感技術與無人機、VR頭盔等設備的“最后一厘米”問題一旦得到解決,市場和世界將隨之而來怎樣的變化?
實感技術:英特爾的野心版圖
若要評選英特爾的2016年度關鍵字,“實感技術”一定以大號字體出現。從年初的國際消費電子展(CES 2016)開始,英特爾首席執行官科再奇便濃墨重彩地闡述自家的實感技術—日趨成熟的實感技術已到了降臨之時,它將會在智能穿戴、游戲、體育轉播等多個應用領域中展露鋒芒。
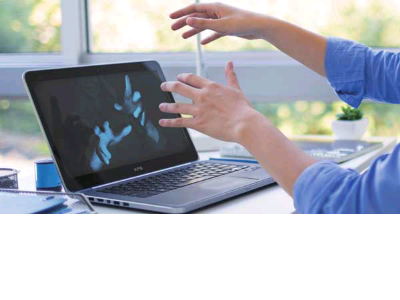
且看它在CES 2016中的亮相:藝術家兼多媒體研究者Yago De Quay首先呈現了沒有樂隊照樣“演奏”的虛擬音樂盒。通過一系列高精度手勢與手指動作,不但呈現數字聲音和音樂,亦可控制舞臺上的光影效果。這一表演的精髓在于采用了多個英特爾實感技術攝像頭,能夠精確追蹤手勢與手指動作。
英特爾在主題演講現場播放了一段Drone 100視頻,首次展示了100架無人飛行器與音樂、煙花之間的炫酷互動。在視頻中,這一規模史無前例的無人機方隊,勝似絢麗煙花在空中曼舞。由此,英特爾也創造了全球最大規模的無人機同時飛行的世界紀錄,當然,其控制機制依舊與英特爾實感技術關系深遠。同時露面的還有同一技術支撐的昊翔(Yuneec,英特爾投資的中國無人機公司)Typhoon H無人機。依靠機上的實感攝像頭識別深度信息,它已能夠實現自動避障和自航的功能。
這就是英特爾在實感領域的野心藍圖—實感技術不僅能讓傳統的電腦識別人臉、表情、手勢等指令,更能應用于“地面”與“天空”。“地面”指各種機器人,比如讓掃地機器人構建房間的三維模型,既不重復清掃、也不會遺漏死角。而“天空”即指當前備受關注的無人機領域—除了能識別障礙物以外,更能實現智能路徑規劃,也就是真正意義的智能避障功能。
Euclid:的意義
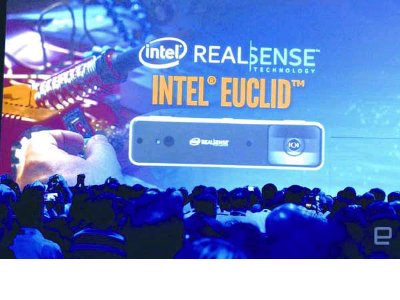
8月開幕的2016英特爾信息技術峰會(IDF2016)上,配備完整Realsense實感攝像陣列的超小型計算設備Euclid亮相。這個與古希臘數學家同名的產品,外形不過糖果盒大小,卻搭載了實感技術攝像頭、Atom處理器、通訊模塊、電池、Ubuntu Linux和Robot OS,并預裝了一個面向開發者體驗友好的工具類應用程序,已經具備了微型電腦的大部分功能。一言概之,是一個能放進口袋里的機器人平臺。英特爾聲稱,Euclid的設計出發點是為機器人提供具備深度實感的計算機視覺系統。它如同機器人的大腦,在IDF的臺上示范中,只需將Euclid與機器人“合體”,就能賦予后者運動追蹤感知、環境識別等功能。演示人員將Euclid裝載進一臺3D打印的機器人,然后通過操作界面控制,即可向機器人下達指令,讓它跟隨周圍人類的動作。
從科再奇的闡述中人們意識到,Euclid對于有志于實感技術的開發者而言,簡直是夢寐以求的。英特爾Euclid開發工具包是研究人員、創客和機器人開發者的理想配備,這個即插即用的平臺讓他們能夠快速輕松地使用實感技術開發應用。而且,與微軟Xbox Kinect相比,功能類似、身形苗條的Euclid更加適合應用在人工智能上。
科再奇說:“我們相信Euclid是機器人開發商的理想選擇,它通過RealSense攝像頭以及運動傳感器為機器人提供感知能力,并且還提供了相關的軟件工具。”Euclid項目的開發完成時間,被英特爾鎖定在2017年第一季度。
Movidius:寒武紀前的最后一塊拼圖
9月初,英特爾宣布了一項讓“真”業界紛紛矚目的收購,對象是初創公司Movidius。這家成立于2006年的公司此番投入英特爾懷抱,也標志著它的關鍵產品—Myriad系列VPU融入英特爾的實感技術版圖。這是一款花費9年時間,自主研制出的全新架構低功耗視覺處理器。與為多種用途推出的普適性較高的CPU、GPU不同,VPU專門為計算機視覺進行優化,可以用于3D掃描建模、室內導航、360°全景視頻等更前沿的計算機視覺用途。
VPU 可以提供強大的視覺運算能力,運用在無人機上,可使無人機攝像頭可以實現自主運算,判斷周圍環境,實現自主導航、定位的無人飛行;用在VR設備上,可使傳感器收集到的數據進行高速處理,讓佩戴者頭部動作和顯示內容的變化之間的延遲更短。不少外媒評價,英特爾收購Movidius的目的在于增強實感技術能力。“簡單地說,計算機視覺使機器能夠進行視覺處理從而了解周圍的環境,”英特爾高級副總裁兼新技術事業部總經理Josh Walden如是說:“相機作為裝置的‘眼睛,中央處理單元是‘大腦,圖像處理器是‘視覺皮層。整合后,計算機視覺使導航和地圖、防撞、跟蹤、目標識別、檢查分析等多種在新興市場極具吸引力的功能。”英特爾需要技術用于物體識別、理解場面、驗證、跟蹤和導航。Walden 表示 Movidius 為加速英特爾自己的計劃提供了“巨大的潛力”。Movidius CEORemi El-Ouazzane在博客上表示,該公司仍將繼續其原有的使命—“為機器賦予視覺能力”,同時也將與英特爾的實感技術配合。
總之,英特爾希望讓其實感技術傳感器技術盡可能地在更多設備上部署,其中的一個關鍵是讓能耗盡量降低。Movidius正好為英特爾提供了這樣的助力。Movidius的“入手”,令英特爾進一步深入火熱的新市場,包括無人機、機器人、VR頭盔、安保攝像頭等領域的信心大為增強。他們期待著“一場計算的寒武紀大爆發”,而有了RealSense、Movidius和知覺計算技術全套產品的支持,英特爾自信將站在這新一波弄潮的最前沿。
Funcap:隔空取物的抓娃娃機
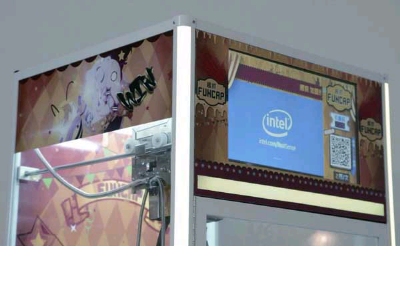
然而在龐大生態圈布局完成之前,可能已經有浮上冰面的先驅者,有些甚至已經潛入我們身邊。比如這個被外國友人稱作“黑科技”的抓娃娃機。早在2014年的英特爾IDF上,科再奇就演示過林云帆團隊開發的體感控制娃娃機——趣抓Funcap。研發出它的數娛科技與英特爾關系匪淺,早年林云帆便帶隊參加過英特爾全球感知計算大賽,斬獲不少獎項。這款基于RealSense改裝的小玩具,還在2015年底的《唐人街探案》首映禮上秀了一把。
到IDF15的時候,它似乎已經完全不需要專人演示了—現場擺設了一臺裝滿安卓公仔的Funcap,參觀者們在它面前排起了長龍,紛紛一試“隔空取物”的體驗。正是實感技術的介入,讓Funcap與普通的抓娃娃機截然不同。它誕生的契機略帶偶然色彩—開發者之一因為經常陪女兒玩抓娃娃機、被坑錢太多,于是萌生了“在女兒面前炫耀能隔空取物抓娃娃”的念頭。說干就干,他們買回一臺抓娃娃機、花一天時間把單片機的控制電路改裝接上了電腦、連上自己開發的一款叫PIC的實感技術控制軟件……三個人、三天時間,就在朋友圈得瑟體感控制娃娃機的絕技了。這一套“黑科技”中最“黑”的部分便是RealSense實感技術中的手部識別功能,它取代了傳統的遙感操控,才營造出了“隔空取物”的感覺。開發者在隨筆中寫道:“我們可以三天完成原型,全靠實感技術SDK的簡單易用和我們三年堅持開發實感技術的信念。”

寫在最后
關于實感技術,科再奇曾說:“科技扮演的角色越來越具顛覆性、開創性、且平易近人。人們的焦點從過去的選擇產品逐漸轉向選擇經驗,英特爾的科技就像是催化劑,不僅協助讓全新的體驗變成可能,最終還能改善我們居住的世界。”英特爾實感技術帶來了自然交互,意圖整合“真實”和“虛擬”世界。真正顛覆“固有認知世界”的大門,正在無數開發者的前方。