溫度控制系統的設計與研究
2016-10-21 20:58:27朱文立張華山王衍橋吳帝
科學與財富 2016年9期
朱文立 張華山 王衍橋 吳帝


摘要:本系統使用了MC9S12XS128作為接收信號、處理信號、輸出信號的核心,由4*4鍵盤作為設定溫度的輸入工具,12864作為顯示工具,以及LM35作為測溫元件;采用PID算法下的PWM波對水泥電阻和風扇進行控制,調節加熱或降溫的速度和幅度,實現了在設定溫度誤差1%的攝氏度下的溫度控制;采用定時器中斷進行計時并且顯示相應加熱時間;利用24C02存儲設定溫度和動態實現時間;利用12864顯示溫度曲線。
一、 方案設計
1.概述
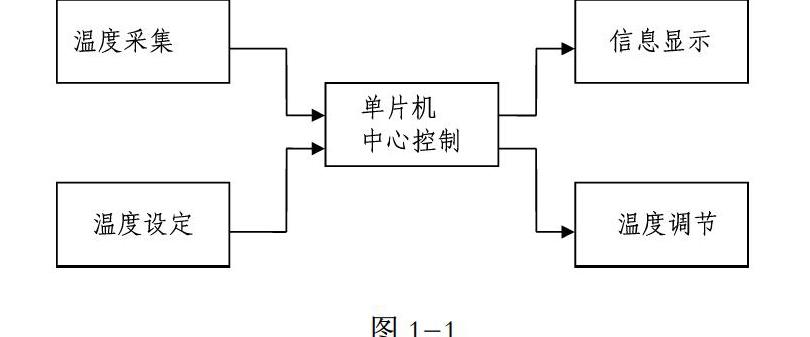
系統主要分為溫度采集、溫度設定、單片機控制、信息顯示和溫度調節五個部分,總體的系統構造如圖。
2.各模塊方案選擇與論證
(1)單片機
采用MC9S12XS128單片機作為系統的控制核心。MC9S12XS128十六位單片機。基于S12 CPU內核,可以達到25MHz的HCS12的2-5倍性能。總線頻率最高可達40 MHz。
(2)溫度控制方法
1.電阻加熱模塊
本系統控制電阻加熱采用PID控溫法。PID控溫法是基于經典控制理論中的PID調節器控制原理,由于其算法簡單、可靠性高等優點被廣泛應用工業過程控制中,尤其適用于可建立精確數學模型的確定性控制系統。采用這種方法實現的溫度控制器。PID調節器模型的控制性能大大地優越于定值開關控溫。并且控制器的參數可以在現場實現在線整定,因此具有較大的靈活性,可以得到較好的控制效果。
2. 風扇散熱模塊
風扇控制采用分段函數法。在當前溫度到達設定溫度時開啟風扇并使其全速轉動以減少超調時間,溫度穩定后以原來一半的速度轉動,使散熱片在水泥電阻和風扇的共同作用下達到動態平衡。
(3)溫度采集
DS18B20是常用的溫度傳感器,具有體積小,硬件開銷低,抗干擾能力強,精度高的特點,但是編程較復雜,運轉的速度較慢;LM35具有很高的工作精度和較寬的線性工作范圍,LM35比按絕對溫標校準的線性溫度傳感器優越行較好。從使用角度來說,LM35無需外部校準或微調,可以提供±1/4℃的常用溫度精度。
選擇溫度傳感器LM35。
(3)溫度設定
選用4*4鍵盤輸入,在程序上沿用傳統的掃描思想.
(4)存儲設備
選用24C02串行E2PROM作為存儲器件存儲設定溫度,動態響應時間等信息,其具有接口方便,體積小,數據掉電不丟失等特點,在下次設備啟動時從存儲器中調用相關信息顯示在屏幕上,并將此次運行的信息覆蓋錄入24C02串行E2PROM中。
(5)信息顯示
1602液晶顯示屏可同時顯示32個字符,且其占用單片機的端口數量少,并且連線方便,擁有光標顯示、閃爍、整屏移動等豐富功能,能夠滿足同時顯示設置溫度、實測溫度、響應時間的要求,但不能顯示曲線;12864顯示功能強大,既能夠顯示字符又能夠打點顯示曲線,滿足要求。
選擇12864。
(6)溫度調節
通過兩個三極管TIP122放大驅動之后外接12V的電壓分別對水泥電阻加熱和驅動風扇運轉。這種方法所需元器件數量多;LM298N芯片主要用于電機的控制,用來控制水泥電阻加熱和風扇的轉動。這種方法比較方便,電路簡單,有很強的可操作性。并且可以到達額定的功率,達到快速加熱的要求。
綜上選擇LM298N芯片驅動。
(7)濾波
為克服隨機干擾造成的誤差,有必要進行濾波處理。
硬件濾波,通過濾波電路對信號進行濾波,改善信號質量;數字濾波,采用平均值法來抑制有效信號中的干擾成分。
數字濾波具有簡單可靠、節省硬件成本等優點,故選擇數字濾波,采樣102次溫度數據之后去除最大值和最小值再取平均值,穩定采樣環節,減少干擾引起的誤差。
二、硬件系統的設計與實現
1.單片機最小系統
2.LM35測溫電路
測溫系統由LM35采集溫度,當LM35測得溫度后轉化成電壓信號輸入到單片機.
3.溫度控制系統
采用LM298N芯片進行驅動水泥電阻加熱和風扇降溫,電路簡單。
4.溫度設定與信息顯示
使用4*4鍵盤作為錄入工具,通過調用鍵盤掃描程序讀取端口電平信息,讀取輸入的溫度與指令.使用12864液晶顯示屏顯示散熱片當前溫度和設定溫度、響應時間等.
三、軟件系統的設計及實現
1.程序流程圖
2.PID算法
PID控制規律是調節器最常用的控制規律。PID調節器是一種線性的調節器,它根據給定值與實際輸出值構成的控制偏差將偏差的比例(P)、積分(I)、微分(D)線性組合對控制對象進行控制,故稱為PID調節器。PID算法的出來的占空比直接送給快速PWM波里面的參數,從而達到快速控制PWM占空比的功能。原理框如下。
上圖中rin(t)為輸入量,rout(t)為輸出量,err(t)=rin(t)-rout(t)為偏差量PID的控制規律為
針對本控制系統我們采用變積分PID。變積分PID可以看成是積分分離的PID算法的更一般的形式。在普通的PID控制算法中,由于積分系數ki是常數,所以在整個控制過程中,積分增量是不變的。但是,系統對于積分項的要求是,系統偏差大時,積分作用應該減弱甚至是全無,而在偏差小時,則應該加強。積分系數取大了會產生超調,甚至積分飽和,取小了又不能短時間內消除靜差。因此,根據系統的偏差大小改變積分速度是有必要的。變積分PID的基本思想是設法改變積分項的累加速度,使其與偏差大小相對應:偏差越大,積分越慢;偏差越小,積分越快,從而很好地吻合了系統的需求。
四、系統功能測試
經檢驗測試,該系統開機可以顯示上次運行時信息,能夠完成溫控功能,可穩定在設定溫度1%的誤差之內,并可同時對響應時間進行計時,運行十分穩健。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45