基于角度傳感器感知的靜態智能隨動前照燈系統設計
2016-10-21 18:39:54馬曉晨張志威李曉艷王典
科技創新與應用 2016年7期
馬曉晨 張志威 李曉艷 王典
摘 要:對隨動轉向照明系統(AFS)的概況、系統組成和靜態智能前照燈系統進行了分析,在此基礎上提出了一種基于角度傳感器感知的靜態智能隨動前照燈系統。該系統綜合了低成本和高質量的優勢,運用汽車總線技術,掛接傳感器模塊,采集方向盤轉角信息作為AFS 系統的輸入,智能控制頭燈里面的具有特殊角度的小燈泡來實現燈光補償,并對系統軟硬件設計進行了闡述。
關鍵詞:AFS系統;角度傳感器;隨動補償
1 AFS概況
隨動轉向照明系統,亦稱為自適應前照燈系統(adaptive front-lighting system,AFS),智能前照燈照明系統(advanced front- lightingsystems)[1],是當今社會中高端轎車中配備的車輛安全輔助駕駛系統,該系統能夠根據不同的夜間行駛情況,如方向盤轉角、行駛速度、車輛偏轉率等因素對大燈進行動態調節,以適應當前的轉向角,從而實現燈光方向與汽車當前行駛方向一致,消除視覺盲區,增強駕駛員在不利環境下對環境的感知能力,輔助駕駛人員安全行車。
2 AFS系統的組成輔助照明系統
AFS系統主要由傳感器組件、電控單元(亦稱為大燈照程調節控制單元)、執行器(動態燈光調節電機等)三大部分組成。(1)傳感器組件:AFS用到的傳感器主要由方向盤轉角傳感器、車身傾斜傳感器、車速傳感器、光敏傳感器等等。(2)電控單元:AFS系統的控制芯片亦稱為大燈照程調節控制單元,可分為執行算法的主芯片和執行控制動作的副芯片,主芯片接收來自車載總線中傳遞過來的信號,諸如方向盤轉角、車速、車身傾角等等,經過算法處理判斷、傳遞執行命令至副芯片,副芯片執行命令控制執行元件如燈光調節電機等等元件做出反應動作。(3)執行器:AFS系統的執行器包括燈具總成和相應的動靜態執行元件。燈具總成包括一個近光/遠光隨動轉向前照燈以及側向燈光補償前照燈,動靜態執行元件包括用于控制水平方向和垂直方向調節的點擊電子卡以及電子鎮流器等。
3 靜態智能前照燈系統
靜態智能前照燈系統又稱為輔助照明系統,與隨動轉向的水平和垂直方向的動態調整不同,靜態智能前照燈系統并非利用燈具轉動來實現燈光補償,而是通過在前照燈側向安裝幾個不同傾角的側向補償燈具,在方向盤轉動到特定的角度范圍來激活側向補償燈具的開啟,從而實現側向燈光來補償轉彎過程中存在的視覺盲區,因此,輔助照明系統主要是通過多個燈泡實現不同角度近光燈照明功能[1]。輔助照明對AFS 起到了補充作用,對于輔助照明系統來說,其最大的優勢就是低成本,不需要太復雜的技術。
4 基于角度傳感器感知的靜態智能隨動前照燈系統設計
4.1 基于角度傳感器感知的靜態智能隨動前照燈系統設計的優勢
基于角度傳感器感知的靜態智能隨動前照燈系統設計是在CAN/LIN車載總線的基礎上進行的,包括系統硬件和軟件兩方面。基于角度傳感器感知的優點在于,利用角度傳感器進行方向盤轉角的模擬量測量,在汽車轉向的過程中實時將所測得的角度模擬量傳遞給控制模塊,控制模塊中的處理器對數據進行模數轉換,并利用算法控制側向小燈的亮與滅,從而在轉向的過程實現側向隨動燈具的亮滅來實現燈光的補償,進而消除夜間行車過程中存在的視覺盲區,相比于隨動轉向的水平和垂直方向的動態調整而實現的燈具偏轉來實現燈光補償而言,靜態智能隨動前照燈系統具有更低的成本,只需要在車載總線中掛接一套角度傳感器模塊作為輸入元件和一套具有一定偏角的補償燈具作為執行元件即可實現燈光補償。
同時靜態智能隨動前照燈系統亦能高質量的保證燈光補償的效果,靜態智能隨動前照燈系統在主前照燈的側向安裝有多盞角度不同的補償燈具來實現在不同轉彎情況下的燈光補償。由于在夜間行車過程中,視覺盲區的大小與汽車轉彎半徑成負相關關系,即轉彎半徑越大,即轉彎越平緩時視覺盲區越小,在這種情況下汽車方向盤的轉角較小,通過算法處理控制側向小燈亮的盞數少即可滿足光線的補償;轉彎半徑越小,即轉彎越急時,視覺盲區越大,在這種情況下汽車方向盤的轉角越大,通過算法處理控制側向燈具亮的盞數多才可滿足光線的補償。
4.2 汽車前照燈隨動轉向模型的計算與確立
汽車前照燈隨動轉向模型的確立通常情況下考慮兩點因素,一為轉彎道路的曲率;二為轉彎過程中車輛的行駛車速、曲率大小與盲區大小成正相關關系,曲率較小的情況下照明范圍可以覆蓋盲區,可以不進行隨動轉向,而當曲率較大的情況下,盲區的范圍會增加,此時需要隨動轉向來進行燈光補償;速度與隨動轉向角度成負相關關系,汽車車速越高,隨動裝向角度越小,反之則越大。
故而汽車前照燈隨動轉向模型主要有2自由度、4自由度、7自由度三種自由度情況,其中2自由度忽略轉向系統的影響,以前輪轉角作為輸入,忽略懸架的作用,認為汽車車廂只作平行于地面的平面運動,4自由度考慮方向盤轉角、車身側傾角、質心側偏角、以及航向角,7自由度在4自由度的基礎上還考慮了懸架和車身轉動慣量等的影響,對于普通情況下,2自由度基本可以滿足基本的精度要求,故文章設計的系統以2自由度為主,忽略轉向系統的影響,認為汽車做平行于地面的平面運動,采集方向盤轉角作為系統的輸入。
4.3 硬件設計
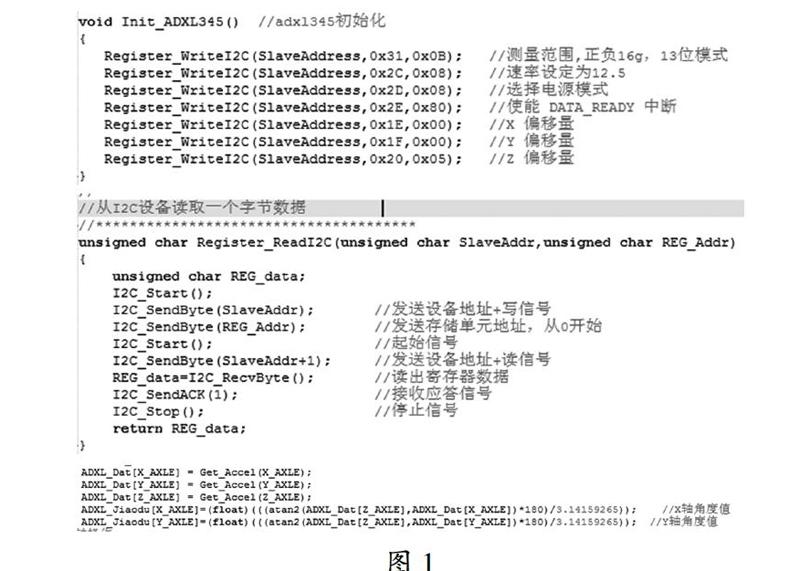
角度傳感器選擇ADXL345傳感器,ADXL345是一款小而薄的超低功耗3軸加速度計,分辨率高(13位),測量范圍達± 16g,可通過SPI(3線或4線)或I2C數字接口訪問;ADXL345測量方向盤轉角,通過總線傳遞到AFS 控制模塊,對于CAN 總線使用總線拓補結構,通過對數據算法處理來實現對前照燈側向燈具的控制[3]。
4.4 軟件設計
軟件設計主要是指系統的控制策略,通常情況下,采取模塊化編程的方法,將整個系統軟件按照一定的規則和功能分解為單獨的模塊進行設計。圖1為控制算法中主要模塊的代碼及解釋。(見圖1所示)
5 結束語
對AFS 的發展概況做了介紹,通過對AFS的結構和系統組成的分析,提出了一種新的基于角度傳感器感知的靜態智能隨動前照燈系統,對硬件構成、軟件執行和隨動轉向模型做了分析,由于加入了對方向盤角度參數的計算,具有更加智能、安全性更高的特點。
參考文獻
[1]于曉良.汽車自適應照明控制系統的研究[D].大連理工大學,2009.
[2]黃仁忠.汽車自適應照明系統開發[D].大連理工大學,2008.
[3]鄭志軍.帶CAN總線的汽車智能前照燈系統設計[D].上海交通大學,2007.