動態靶標評估光電經緯儀跟蹤性能的局限性分析
2016-10-21 04:35:58李文成
電子技術與軟件工程 2016年5期
李文成
摘 要 目前對光電經緯儀普遍采用光學動態靶標進行跟蹤性能評價,但是由于輸入與指標不能對應,導致評價結果不夠精確。因此,本文建模分析了采用動態靶標進行光電經緯儀跟蹤性能評估的局限性,仿真結論有助于工程實踐及檢測方法的改進。
【關鍵詞】動態靶標 光電經緯儀 跟蹤性能 局限性
采用室內檢測方法能有效的評估光電經緯儀的跟蹤性能,但是等效目標等方法還無法在室內檢測中實際應用,因此目前普遍采用的是光學動態靶標來進行檢測。但是對光學動態靶標檢測理論進行分析發現,光學動態靶標模擬的運動目標投影到光電經緯儀的方位和俯仰兩個方向上的運動包含大量高次諧波的正弦波的合成。因此,導致利用光學動態靶標檢測時,輸入條件與指標要求不完全對應,對光電經緯儀跟蹤性能的評價也不夠客觀準確。
1 動態靶標模型分析
1.1 動態靶標
目前在室內進行光電經緯儀跟蹤性能檢測的裝置普遍采用光學動態靶標,其主要由光學系統、機械系統和控制系統三部分構成。在進行跟蹤性能檢測時,通過調整光電經緯儀和光學動態靶標的相對位置,使得動態靶標空間旋轉形成的光錐圓錐點與光電經緯儀的回轉中心實現重合。
為建立運動模型,首先建立球面坐標系,坐標系原點O為光電經緯儀視軸、垂直軸和水平軸的交點。假設動態靶標上反射鏡反射發光元件(平行光管)發出的光形成的光點為S,光點進行空間旋轉運動,設其旋轉圓心為某位置R,旋轉軸為直線OR,光點旋轉平面與直線OR垂直,此時,在光點進行旋轉運動時,就形成了一個光錐,光錐頂點為O。在光點模擬空間目標的運動過程中,S點就是光電經緯儀跟蹤的目標。假設光錐的半錐角為a,其定義為動態靶標旋轉軸與經緯儀視軸的夾角,同時也是旋轉軸OR與S點出射光的夾角。假設旋轉軸OR到水平面的夾角為b,光電經緯儀的俯仰角和方位角分別為E和A。假設動態靶標的光點從初始位置S0點開始運動,當光電經緯儀跟蹤的光點從S0點運動到某位置S點時,其相對于旋轉軸OR有轉角θ,設靶標運動的時間為t,靶標轉動的角速度為ω,則經計算可得到θ=ωt。
1.2 動態靶標空間運動建模
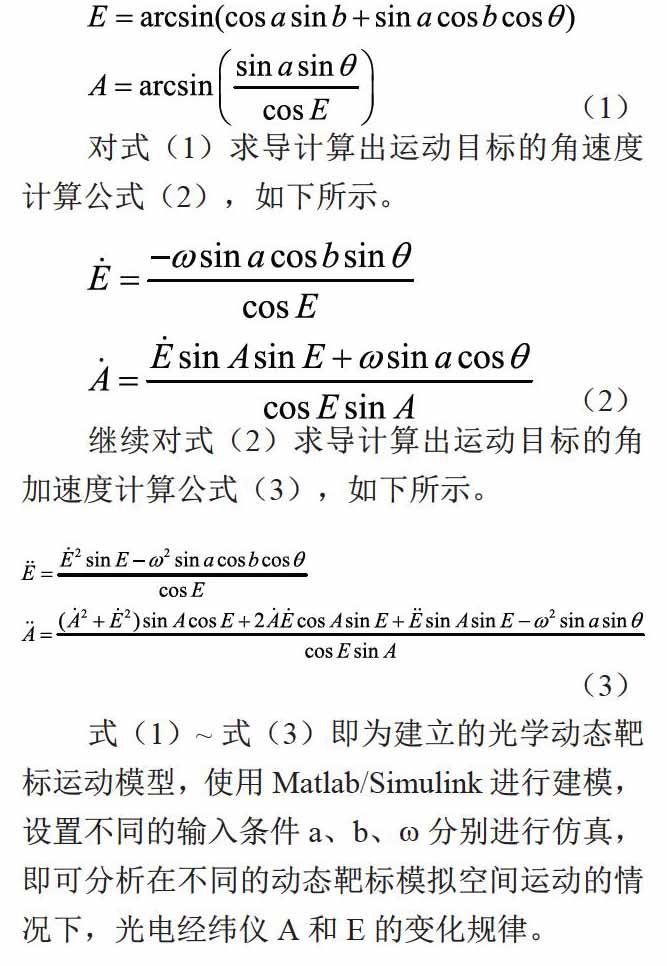
采用球面三角理論計算動態靶標的空間運動并建模。動態靶標模擬的運動目標角度計算結果見式(1)。
式(1)~式(3)即為建立的光學動態靶標運動模型,使用Matlab/Simulink進行建模,設置不同的輸入條件a、b、ω分別進行仿真,即可分析在不同的動態靶標模擬空間運動的情況下,光電經緯儀A和E的變化規律。
2 評估局限性分析
2.1 動態靶標的高階導數分析
采用建立的模型進行仿真分析,假設動態靶標模擬的目標為勻速運動,初始輸入取a=21.2°和b=43.8°,運動周期T=8.5s。將確定的輸入條件導入建立的模型,仿真分別得到光電經緯儀的俯仰角E和方位角A的角位置、角速度和角加速度。對上述結果求高階導數,從結果可得以下結論,兩個方向的導數值隨著階次的增加快速增大,并且隨著階次越來越高,導數值增加幅度也越來越大。當計算到5階導數時,方位方向的導數值峰值已接近800,且俯仰方向的導數值峰值也相應的達到了125,方位方向相較于俯仰方向的增速和增加的幅值更加明顯是因為正割補償效應的影響,這就表明高次諧波對方位方向影響更大,相應的也極大的影響了光電經緯儀跟蹤精度評價。
2.2 動態靶標對比分析
對模型輸入條件進行適當調整,當選擇適當的a、b和T時,可仿真得到滿足最大速度和最大加速度指標的信號。但是分析動態靶標的運動情況可以發現,其與等效正弦模型有較大的差別。通過對計算模型進行分析可得,無法找到一組動態靶標輸入可以同時滿足最大角速度和最大角加速度指標。變更輸入參數發現,如果一組參數滿足了最大角速度指標,但會導致角加速度過大,超出指標。如果一組參數滿足最大角加速度,最大角速度往往達不到指標要求。
從高階導數仿真分析結果可以看出,動態靶標方位方向相較于俯仰方向的信號各階導數增速和增幅均更加明顯,因此,在室內檢測采用動態靶標方法時,一般情況下,當方位方向滿足指標要求時,俯仰方向也會同樣滿足。
分別假定等效正弦模型滿足的指標為=50°/ s,=30°/s2,動態靶標滿足的指標為=30°/s2,分別獲取滿足指標情況下的等效正弦信號和動態靶標信號。從仿真結果可以看出,動態靶標信號并不能完全代替等效正弦信號。但理論上是基于等效正弦提出的光電經緯儀的跟蹤精度指標,所以當采用動態靶標檢測時,導致了指標要求與期望輸入信號的不一致。同時,通過理論分析也可以發現光學動態靶標模擬目標的空間運動是混合大量高次諧波的,其運動并不是純正弦運動。尤其當運動周期較短或靶標架設較高時,偏離正弦的偏差會更明顯,并且這種偏離在方位方向上表現的比俯仰方向更明顯。
3 結論
由于室內檢測難于滿足等效目標法等的實驗條件,目前對光電經緯儀普遍采用光學動態靶標進行跟蹤性能評價。本文基于此建立了光學動態靶標的運動模型,在此基礎上仿真分析了使用光學動態靶標進行評價的局限性。仿真結果表明需要采用更加合理的實驗方法進行光電經緯儀評價。
參考文獻
[1]賈峰,李桂芝,李陽.光電經緯儀室內檢測系統的研究與應用[J].飛行器測控學報,2011,30(3):32-35.
[2]顧營迎,沈湘衡等.光電經緯儀旋轉靶標特性對目標跟蹤的影響[J].光學工程,2011,38(3):19-24.
作者單位
92941部隊91分隊 遼寧省葫蘆島市 125000