電子式軟起動(dòng)器仿真研究
2016-10-24 05:03:28國(guó)網(wǎng)湖南省電力公司桂東縣供電分公司王小敏
電子世界 2016年18期
關(guān)鍵詞:交流
國(guó)網(wǎng)湖南省電力公司桂東縣供電分公司 王小敏
電子式軟起動(dòng)器仿真研究
國(guó)網(wǎng)湖南省電力公司桂東縣供電分公司 王小敏
電子式軟起動(dòng)器以其高性價(jià)比,在軟起動(dòng)器行業(yè)得到越來越廣的關(guān)注,文章在分析三相調(diào)壓原理的基礎(chǔ)上搭建MATLAB仿真模型,將斜坡升壓軟起模式和限電流軟起動(dòng)模式進(jìn)行仿真分析,對(duì)于電子式軟起動(dòng)器的研究具有一定的參考意義。
軟起動(dòng)器;限電流;三相調(diào)壓;MATLAB
0 引言
當(dāng)前在電力拖動(dòng)中廣泛應(yīng)用軟起動(dòng)器對(duì)異步電機(jī)進(jìn)行起停控制,軟起動(dòng)器中,電子式軟起動(dòng)器以性能優(yōu)越,價(jià)格適中,得到了廣泛的使用。其性能款式多樣,起動(dòng)模式也具有多樣化,適用于多種場(chǎng)合。電子式軟起動(dòng)器采用三相調(diào)壓原理,集現(xiàn)代電力電子技術(shù)和先進(jìn)控制技術(shù)于一體,且逐步往智能化、節(jié)能化和高起動(dòng)轉(zhuǎn)矩方面發(fā)展[1]。對(duì)軟起動(dòng)器現(xiàn)在廣泛使用的斜坡升壓軟起模式和限電流軟起動(dòng)模式進(jìn)行仿真分析,對(duì)軟起技術(shù)的進(jìn)一步研究具有一定的實(shí)際意義。
1 三相交流調(diào)壓原理
把一對(duì)反并聯(lián)晶閘管串接在交流電路中,通過對(duì)兩個(gè)晶閘管開通相位的控制,在不改變交流電頻率的前提下調(diào)節(jié)輸出電壓的有效值,這種電路稱為交流調(diào)壓電路[2]。交流調(diào)壓電路廣泛用于異步電機(jī)的軟起動(dòng)、異步電機(jī)調(diào)速以及調(diào)光臺(tái)燈、舞臺(tái)燈光控制等場(chǎng)合,在電力系統(tǒng)中也常用于對(duì)無功功率的無極調(diào)節(jié)。
三相交流調(diào)壓電路根據(jù)三相聯(lián)接形式的不同具有多種拓?fù)浣Y(jié)構(gòu),如圖2.7所示。其中心型聯(lián)結(jié)電路和支路控制三角形聯(lián)結(jié)是最常用的電路結(jié)構(gòu)[3]。本文采用的拓?fù)浣Y(jié)構(gòu)為心型聯(lián)結(jié)電路,如圖1a)所示,按是否有中線,分為三相三線和三相四線兩種不同的電路結(jié)構(gòu)。三相四線電路中性點(diǎn)中有比較大的3次諧波電流和3的整數(shù)倍次諧波電流,當(dāng)導(dǎo)通角為90°時(shí),中性線電流約等于各相電流的有效值 ,電路結(jié)構(gòu)相當(dāng)于三個(gè)單相電路的組合。
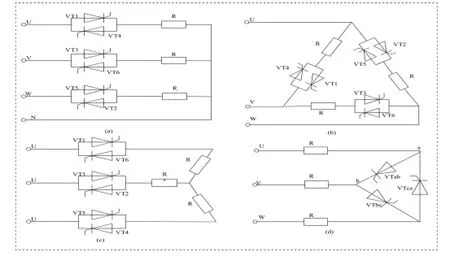
圖1 三相交流調(diào)壓電路(a)帶中性線的星形聯(lián)結(jié);(b)三角形聯(lián)結(jié);(c)三相三線交流調(diào)壓聯(lián)結(jié);(d)載中點(diǎn)控制三角形聯(lián)結(jié)。
三相三線交流調(diào)壓電路中,任一相在導(dǎo)通時(shí)必須和另一相構(gòu)成回路,任意兩相之間的導(dǎo)通則是通過線電壓完成,而線電壓超前相電壓30°,所以導(dǎo)通角移相范圍為0~150°[4],晶閘管應(yīng)采用雙脈沖或?qū)捗}沖觸發(fā)。三相晶閘管的觸發(fā)脈沖信號(hào)依次相差120°,而同一相的兩個(gè)反并聯(lián)晶閘管的觸發(fā)信號(hào)相差180°。為了確保的電路輸出電壓能夠?qū)ΨQ并有相應(yīng)的移相范圍,晶閘管的觸發(fā)信號(hào)相序和相位差必須與電源電壓一致。此外,在感性負(fù)載或小導(dǎo)通角情況下,要求采用控制角大于60°的雙脈沖或?qū)捗}沖觸發(fā)電路以保證晶閘管的可靠觸發(fā)。圖1中所示的四種交流調(diào)壓電路的性能對(duì)比如表1所示。

表1 相調(diào)壓電路接線方式及性能特點(diǎn)
2 直接起動(dòng)
仿真采用的電源電壓分別為:

仿真模型和仿真結(jié):
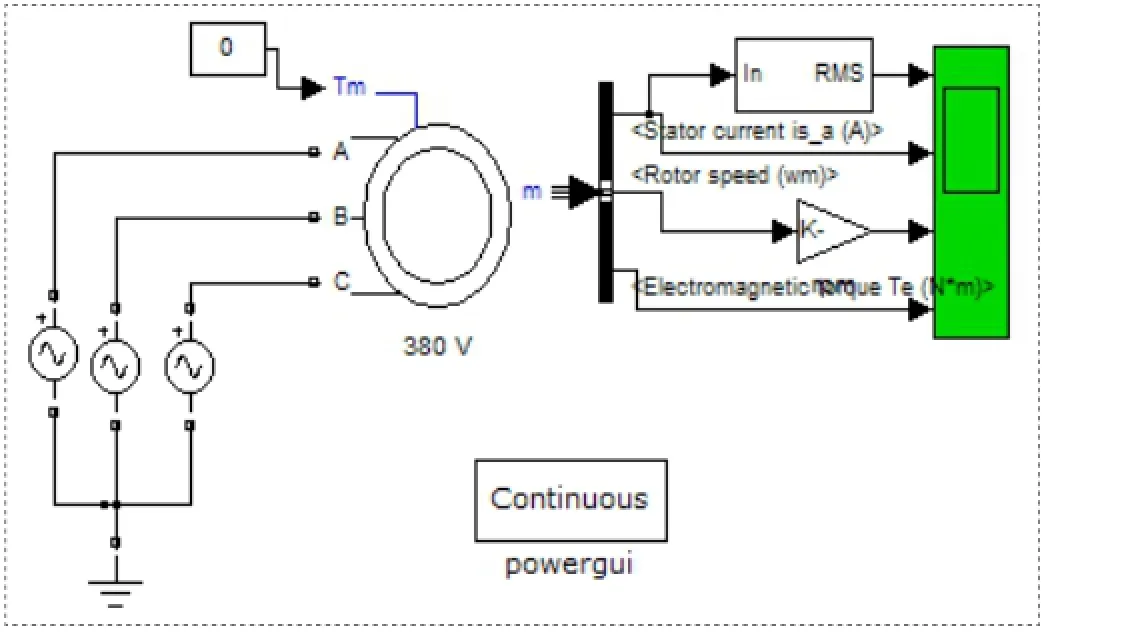
圖2 直接起動(dòng)仿真模型
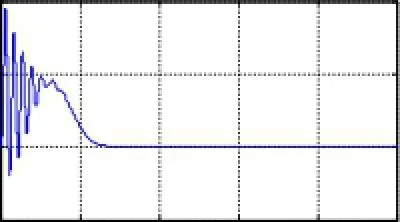
圖3 異步電動(dòng)機(jī)直接起動(dòng)曲線
從圖3中可以看出,異步電動(dòng)機(jī)直接起動(dòng)時(shí),起動(dòng)電流很大,起動(dòng)電流最大有效值約為100A,穩(wěn)定運(yùn)行電流約為10A,電流比高達(dá)約10倍。起動(dòng)轉(zhuǎn)矩在-90N*m到383N*m之間波動(dòng),特別是起動(dòng)初期波動(dòng)最大。電動(dòng)機(jī)起動(dòng)過程約0.3s就能完成,起動(dòng)速度很快。
3 斜坡升壓軟起動(dòng)
斜坡升壓軟起動(dòng)過程中,開始時(shí),定子端電壓迅速提高到設(shè)定的起始電壓U1,以保證有足夠的起動(dòng)轉(zhuǎn)矩,然后以設(shè)定的上升曲線逐步無極升高定子端電壓,電動(dòng)機(jī)轉(zhuǎn)速上升,直到轉(zhuǎn)速達(dá)到額定轉(zhuǎn)速、定子電壓為額定電壓,起動(dòng)過程完成。
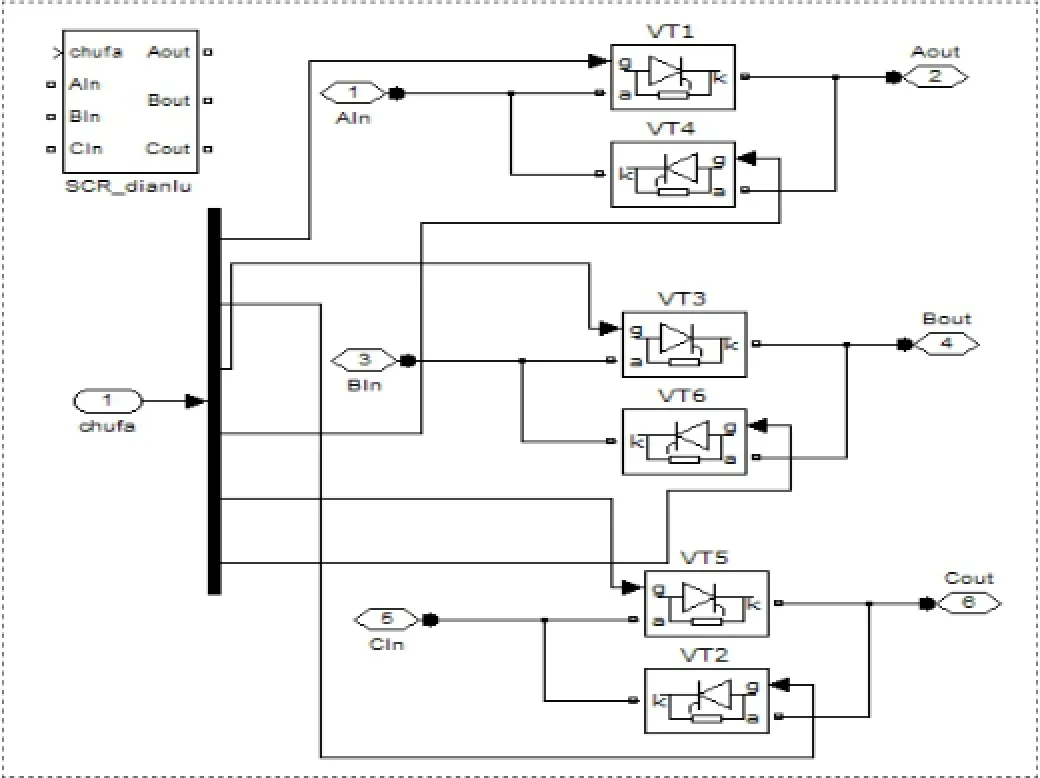
圖4 斜坡升壓軟起動(dòng)主電路

圖5 斜坡給定曲線控制系統(tǒng)
主電路如圖4所示,左上角為封裝的子系統(tǒng),其余部分為內(nèi)部子系統(tǒng),其中六個(gè)晶閘管的觸發(fā)導(dǎo)通順序依次為VT1-VT2-VT3-VT4-VT5-VT6,VT1與VT4構(gòu)成A相主電路,VT3與VT6構(gòu)成B相主電路,VT2與VT5構(gòu)成C相主電路。斜坡升壓軟起動(dòng),通過調(diào)節(jié)晶閘管的導(dǎo)通角,開環(huán)控制晶閘管的輸出電壓。
斜坡升壓軟起動(dòng)通過給定晶閘管的導(dǎo)通角來控制輸出的電壓,達(dá)到降壓軟起動(dòng)的效果。給定曲線控制子系統(tǒng)如圖5所示。

圖6 斜坡升壓軟起動(dòng)仿真總圖
如圖6所示,仿真系統(tǒng)包括三相電源模塊、電壓同步信號(hào)采集模塊、6脈沖信號(hào)發(fā)生模塊、晶閘管電路、異步電動(dòng)機(jī)、信號(hào)給定模塊和測(cè)量模塊組成。

圖7 斜坡軟起動(dòng)仿真曲線
由圖7可以看出,通過斜坡升壓控制異步電動(dòng)機(jī)起動(dòng)時(shí),起動(dòng)電流最大值(有效值)約為60A,穩(wěn)定值約為10A,電流比為6,與直接起動(dòng)的10倍電流相比,電流很大的下降;最大起動(dòng)電磁轉(zhuǎn)矩約為180N.m,比直接起動(dòng)小很多。
4 限電流起動(dòng)
限流起動(dòng)仿真模型如圖8所示,與斜坡升壓軟起動(dòng)不同的是引入了一個(gè)電流閉環(huán)控制。通過輸出的電流來控制晶閘管的導(dǎo)通角,從而實(shí)現(xiàn)限流軟起功能。
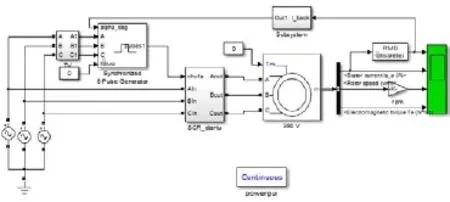
圖8 限電流仿真圖
限流控制封裝模塊內(nèi)部結(jié)構(gòu)如圖9所示,電流反饋信號(hào)I_back與限流設(shè)定值Im作差,偏差值通過一個(gè)滯環(huán)比較器轉(zhuǎn)換為布爾量,若反饋量大于設(shè)定值,則輸出0,反饋量小于設(shè)定值時(shí)則輸出為1。此輸出值與電壓上升速率控制constant1通過一個(gè)積分,得到一個(gè)初值為0的線性遞增信號(hào)。起動(dòng)電壓給定值與積分輸出遞增信號(hào)作差,偏差值經(jīng)一個(gè)飽和限制器限制輸出范圍,out1即為晶閘管的觸發(fā)角。

圖9 限流控制模塊
仿真結(jié)果如圖10所示,由圖可以看出,定子電流最大值為50A,整個(gè)啟動(dòng)過程電流值都在其之下,最大電磁轉(zhuǎn)矩約為120N. m,與斜坡升壓軟起動(dòng)相比,電機(jī)的轉(zhuǎn)速上升很慢,從開始起動(dòng)到穩(wěn)定運(yùn)行約歷時(shí)0.8s,與斜坡電壓相比要慢。
5 仿真結(jié)果對(duì)比分析
從圖3的直接起動(dòng)仿真結(jié)果與圖6的斜坡升壓軟起動(dòng)模式和圖10
的限電流軟起仿真結(jié)果相比,不難看出直接起動(dòng)時(shí),起動(dòng)電流很大,起動(dòng)轉(zhuǎn)矩不大。主要是因?yàn)橹苯悠饎?dòng)時(shí),功率因素底。整個(gè)起動(dòng)過程比較塊,電機(jī)的上升速度比較塊。而軟起動(dòng)時(shí),起動(dòng)電流要明顯比直接起動(dòng)時(shí)要小很多,能夠有效減小對(duì)配電網(wǎng)的電流沖擊,電機(jī)轉(zhuǎn)速上升很平滑,起動(dòng)過程平穩(wěn)。但是起動(dòng)轉(zhuǎn)矩比直接起動(dòng)還小,所以電機(jī)起動(dòng)過程變慢。起動(dòng)電流限制的越低,起動(dòng)過程歷時(shí)越長(zhǎng)。
6 結(jié)語(yǔ)
本文對(duì)現(xiàn)在在中小容量電機(jī)起動(dòng)領(lǐng)域使用廣泛的電子式軟起動(dòng)器進(jìn)行了仿真分析。以電壓斜坡軟起動(dòng)和限電流軟起動(dòng)為例,搭建Matlab仿真模型,并與直接起動(dòng)方式相比,驗(yàn)證了軟起動(dòng)器的優(yōu)缺點(diǎn),對(duì)于軟起動(dòng)器的研究具有一定的參考意義。
[1]陳舟,葉建興.電動(dòng)機(jī)新型軟起動(dòng)設(shè)備分析[J].電子世界,2015(14):27-28.
[2]白雪峰,李沛.單相交流調(diào)壓電路實(shí)驗(yàn)裝置的研制[J].實(shí)驗(yàn)技術(shù)與管理,2006(7):46-48.
[3]胡紅明.異步電機(jī)軟起動(dòng)研究[華中科技大學(xué)博士學(xué)位論文].武漢:華中科技大學(xué),2010.
[4]李林鴻.交流異步電動(dòng)機(jī)模糊自適應(yīng)軟起動(dòng)控制的研究[遼寧工程技術(shù)大學(xué)碩士學(xué)位論文].遼寧阜新:遼寧工程技術(shù)大學(xué),2011.
王小敏(1965—),大學(xué)本科,國(guó)網(wǎng)湖南郴州供電公司高級(jí)工程師,研究方向:電力系統(tǒng)及其自動(dòng)化。
猜你喜歡
科教新報(bào)(2022年12期)2022-05-23 06:34:16
四川勞動(dòng)保障(2021年10期)2021-12-02 01:41:42
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
四川勞動(dòng)保障(2021年4期)2021-07-22 08:08:54
四川勞動(dòng)保障(2021年5期)2021-07-19 06:09:54
四川勞動(dòng)保障(2021年3期)2021-06-09 07:09:22
四川勞動(dòng)保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(guó)(日文版)(2015年10期)2015-04-16 03:53:58
