水下滑翔機(jī)海上試驗(yàn)研究
2016-10-25 10:52:24劉同木陳魯愚
海洋技術(shù)學(xué)報(bào) 2016年4期
關(guān)鍵詞:深度
劉同木,陳魯愚
(1.國家海洋局南海調(diào)查技術(shù)中心,廣東 廣州 510310;2.中國船舶科學(xué)研究中心,江蘇 無錫 214082)
水下滑翔機(jī)海上試驗(yàn)研究
劉同木1,陳魯愚2
(1.國家海洋局南海調(diào)查技術(shù)中心,廣東廣州510310;2.中國船舶科學(xué)研究中心,江蘇無錫214082)
介紹了水下滑翔機(jī)工程樣機(jī)"海翔1"號(hào)2015年在南海的海上試驗(yàn)情況,包括試驗(yàn)對(duì)象、試驗(yàn)海區(qū)、試驗(yàn)步驟和試驗(yàn)數(shù)據(jù)分析等。本次試驗(yàn)最大下潛深度達(dá)到503.7 m,最大垂直速度為0.15 m/s,最大水平航速為0.33 m/s,水中航行里程總計(jì)41.2 km。在4級(jí)海況下完成了通信定位、數(shù)據(jù)傳輸、布放與回收作業(yè),搭載了CTD、葉綠素和溶解氧濃度傳感器進(jìn)行海洋環(huán)境參數(shù)測量,獲得了500 m深度剖面內(nèi)的溫度、電導(dǎo)率、葉綠素濃度和溶解氧濃度參數(shù)信息。本次海上試驗(yàn)為水下滑翔機(jī)產(chǎn)品設(shè)計(jì)定型和示范應(yīng)用奠定基礎(chǔ)。
水下滑翔機(jī);無人水下航行器;海上試驗(yàn)
水下滑翔機(jī)是一種靠剩余浮力驅(qū)動(dòng)、可搭載多種海洋監(jiān)測傳感器的新型水下無人觀測平臺(tái)[1]。它可搭載CTD傳感器,實(shí)現(xiàn)對(duì)溫度、鹽度、深度等海洋動(dòng)力環(huán)境的長期實(shí)時(shí)監(jiān)測,為物理海洋及海洋氣象、化學(xué)、生物等海洋學(xué)科研究提供關(guān)鍵基礎(chǔ)數(shù)據(jù);可攜帶氧濃度傳感器等化學(xué)要素傳感器對(duì)海洋生態(tài)環(huán)境進(jìn)行有效監(jiān)測,為海洋生態(tài)保護(hù)及治理提供有力支持;也可攜帶葉綠素傳感器,通過對(duì)海水中浮游植物的參數(shù)監(jiān)測,為海水養(yǎng)殖及遠(yuǎn)海漁業(yè)開發(fā)提供技術(shù)支撐。
由于水下滑翔機(jī)具有制造成本低、作業(yè)效率高、續(xù)航能力強(qiáng)、自主可控等特點(diǎn),近年來在國內(nèi)外受到了極大的關(guān)注。國外水下滑翔機(jī)技術(shù)已經(jīng)相對(duì)成熟,美國等發(fā)達(dá)國家已基本實(shí)現(xiàn)產(chǎn)品化,如美國的Seaglider、Slocum、Spray,法國ACSA公司的SeaExplorer等[2-5]。國內(nèi)水下滑翔機(jī)的研究剛剛起步,還沒有形成成熟產(chǎn)品,目前還處于工程樣機(jī)試驗(yàn)驗(yàn)證階段[6-11]。國內(nèi)從事水下滑翔機(jī)的科研單位主要有中船舶重工第七〇二研究所、國家海洋技術(shù)中心、中國科學(xué)院自動(dòng)化所、天津大學(xué)、中國海洋大學(xué)和華中科技大學(xué)等涉海科研院所。
海上試驗(yàn)是海洋儀器實(shí)現(xiàn)產(chǎn)品化,投入實(shí)際應(yīng)用前最關(guān)鍵的階段[12-13]。2015年6月5日至6月19日,中船重工第七〇二研究所、國家海洋局南海調(diào)查技術(shù)中心等單位共同承擔(dān)的海洋公益性專項(xiàng)“水下滑翔器產(chǎn)品開發(fā)與應(yīng)用示范”在南海進(jìn)行了海上試驗(yàn)(圖1)。本文介紹了此次海試的試驗(yàn)對(duì)象、試驗(yàn)海區(qū)、試驗(yàn)過程及試驗(yàn)數(shù)據(jù)分析,為水下滑翔機(jī)產(chǎn)品設(shè)計(jì)定型和示范應(yīng)用奠定基礎(chǔ)。

圖1 “海翔1”水下滑翔機(jī)海上試驗(yàn)
1 試驗(yàn)對(duì)象
本次試驗(yàn)對(duì)象為中船重工第七〇二研究所水下滑翔機(jī)工程樣機(jī)“海翔1號(hào)”。水下滑翔機(jī)耐壓殼體和尾部非耐壓艙采用鋁合金制成,首部非耐壓艙采用玻璃鋼和鋁合金混合結(jié)構(gòu),水平翼采用ABS材料加工制作,拋載尾翼由鋼制成,載體進(jìn)行了陽極化合防腐處理。水下滑翔機(jī)主要系統(tǒng)設(shè)備包括:剩余浮力驅(qū)動(dòng)系統(tǒng)、航行控制系統(tǒng)、姿態(tài)調(diào)節(jié)系統(tǒng)、導(dǎo)航系統(tǒng)、水面通訊定位系統(tǒng)、電源與配電系統(tǒng)、應(yīng)急安全系統(tǒng)、作業(yè)傳感器組件等。“海翔1號(hào)”水下滑翔機(jī)外形如圖2所示,主尺度及主要參數(shù)見表1。

圖2 “海翔1”水下滑翔機(jī)

表1 水下滑翔機(jī)主尺度及主要參數(shù)
2 試驗(yàn)海區(qū)
水下滑翔機(jī)海上試驗(yàn)海區(qū)為112°E,18°N附近海域,水深約為2 000 m,試驗(yàn)期間風(fēng)力不大于8 m/s,浪級(jí)不超過4級(jí),海區(qū)0~100 m以內(nèi)的流速小于0.5 kn,表層海水密度1 020.64~1 021.16 kg/m3,表層水溫29.9~31.4℃,周圍5 km內(nèi)目測無漁網(wǎng)或其它設(shè)施,符合試驗(yàn)條件。
3 試驗(yàn)步驟
(1)各系統(tǒng)設(shè)備啟動(dòng),檢查剩余浮力驅(qū)動(dòng)系統(tǒng)、縱橫傾調(diào)節(jié)裝置、航控系統(tǒng)、通訊定位系統(tǒng)、應(yīng)急拋載系統(tǒng)和測試傳感器等是否工作測試正常;
(2)解除應(yīng)急拋載裝置鎖定,設(shè)定水下滑翔機(jī)超過540 m深度時(shí)應(yīng)急拋載系統(tǒng)動(dòng)作;
(3)根據(jù)海試大綱要求,進(jìn)行下水前的安全檢查和功能復(fù)核;
(4)通過自夾式吊放裝置將水下滑翔機(jī)布放下水;
(5)母船上信息處理系統(tǒng)通過銥星通訊對(duì)水下滑翔機(jī)設(shè)定目標(biāo)航向角、滑翔周期、進(jìn)水/排水深度等參數(shù),接收水下滑翔機(jī)的GPS定位坐標(biāo);
(6)水下滑翔機(jī)在水面接收到指令后,剩余浮力驅(qū)動(dòng)系統(tǒng)進(jìn)行進(jìn)水動(dòng)作,減小水下滑翔機(jī)排水體積,使其受到的重力大于浮力,水下滑翔機(jī)開始下潛;
(7)根據(jù)設(shè)定參數(shù),在設(shè)定排水深度處水下滑翔機(jī)剩余浮力驅(qū)動(dòng)系統(tǒng)進(jìn)行排水動(dòng)作,增大水下滑翔機(jī)排水體積,使其受到的重力小于浮力,水下滑翔機(jī)開始上浮;
(8)若為單周期滑翔試驗(yàn),水下滑翔機(jī)在周期結(jié)束后浮出水面進(jìn)行定位與通訊;若為連續(xù)多周期滑翔試驗(yàn),則在設(shè)定進(jìn)水深度處進(jìn)行繼續(xù)下潛,待設(shè)定滑翔周期結(jié)束后滑翔機(jī)浮出水面進(jìn)行定位與通訊;
(9)母船上信息處理系統(tǒng)與滑翔機(jī)進(jìn)行通訊,接收水下滑翔機(jī)GPS定位坐標(biāo);
(10)海試總指揮對(duì)水下滑翔機(jī)工作狀態(tài)進(jìn)行判別,發(fā)送回收或繼續(xù)進(jìn)行下一步試驗(yàn)的指令;
(11)試驗(yàn)結(jié)束后,水下滑翔機(jī)浮出水面,等待進(jìn)行回收操作;
(12)回收水下滑翔機(jī);
(13)從水下滑翔機(jī)下載數(shù)據(jù),檢查試驗(yàn)記錄數(shù)據(jù);
(14)關(guān)閉電源,按照規(guī)程維護(hù)保養(yǎng)。
試驗(yàn)時(shí),使用水下滑翔機(jī)航控系統(tǒng)記測水下滑翔機(jī)深度、縱傾角、橫傾角、艏向角、海水溫度、鹽度、葉綠素或氧濃度(選裝)等參數(shù)隨時(shí)間變化情況;使用GPS測量水下滑翔機(jī)在水面通信定位狀態(tài)時(shí)的經(jīng)緯度坐標(biāo);使用海流計(jì)記錄試驗(yàn)時(shí)的海流速度和方向,使用CTD記錄試驗(yàn)時(shí)的海水密度以及溫、鹽、深數(shù)據(jù)。回收后使用電壓表測量滑翔機(jī)內(nèi)12 V/24 V電量使用情況。
通過試驗(yàn)數(shù)據(jù)分析,可得到滑翔上浮/下潛縱傾角、滑翔距離、滑翔速度、水面通訊定位縱傾角等參數(shù)。
4 海試結(jié)果及分析
4.1水下滑翔機(jī)航行性能分析
4.1.1下潛深度當(dāng)水下滑翔機(jī)控制系統(tǒng)檢測到傳感器達(dá)到設(shè)定壓力,即開始控制上浮,水下滑翔機(jī)海上試驗(yàn)第5航次所達(dá)到的最大下潛深度為503.7 m,下潛深度曲線見圖3。

圖3 水下滑翔機(jī)下潛深度曲線
4.1.2縱傾角在進(jìn)行滑翔運(yùn)動(dòng)及水面數(shù)據(jù)通訊時(shí),水下滑翔機(jī)會(huì)形成一定的縱傾角,縱傾角直接影響航行速度和通訊成功與否。縱傾角定義為:從水下滑翔機(jī)尾部向頭部看,頭部向上縱傾角為正,頭部向下縱傾角則為負(fù)。
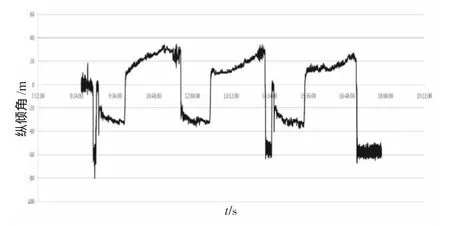
圖4 水下滑翔機(jī)下潛過程中縱傾角變化曲線
4.1.3航行速度水下滑翔機(jī)航行速度分為水平前進(jìn)速度、潛浮速度和滑翔速度,其中滑翔速度為水平前進(jìn)速度和潛浮速度的合量。水平前進(jìn)速度采用GPS衛(wèi)星定位起止點(diǎn)之間的距離除以其航行時(shí)間得到,由于衛(wèi)星定位顯示的是直線距離,并不能完全反映滑翔機(jī)在水平方向上的航行里程,因此得到的是水下滑翔機(jī)的最小平均水平前進(jìn)速度;潛浮速度取水下滑翔機(jī)的下潛上浮速度兩個(gè)量的均值;根據(jù)矢量合成定理,潛浮速度為滑翔速度垂直方向上的分量,因此滑翔速度可以通過潛浮速度和平均縱傾角來得到。無因次滑翔距離為水下滑翔機(jī)單次水平滑翔距離與其下潛深度的比值。水下滑翔機(jī)海試采用的剩余浮力調(diào)節(jié)量為±0.6L,最大剩余浮力調(diào)節(jié)量為±0.8L。
在工作深度和功能考核試驗(yàn)過程中,水下滑翔機(jī)平均垂直速度為0.12 m/s,最大垂直速度為0.15 m/s,最小垂直速度為0.11 m/s;平均水平航速為0.15 m/s,最大水平航速為0.33 m/s,最小水平航速為0.03 m/s;平均穩(wěn)定滑翔速度為0.34 m/s,最大穩(wěn)定滑翔速度0.43 m/s,最小穩(wěn)定滑翔速度0.28 m/s;平均無因次滑翔距離為2.61,最大無因次滑翔距離為6.3,最小無因次滑翔距離為0.5。
4.2海洋環(huán)境測量數(shù)據(jù)分析
水下滑翔機(jī)海上試驗(yàn)搭載了CTD、葉綠素和溶解氧濃度傳感器進(jìn)行海洋環(huán)境參數(shù)測量,采用的傳感器技術(shù)參數(shù)見表2,獲得了500 m深度剖面內(nèi)的溫度、電導(dǎo)率、葉綠素濃度和溶解氧濃度參數(shù)信息,并可進(jìn)一步獲得鹽度和密度數(shù)據(jù)。本節(jié)選取第5航次的測量數(shù)據(jù),對(duì)AUG-5海試區(qū)域的海洋環(huán)境信息進(jìn)行初步分析。

表2 水下滑翔機(jī)主要觀測儀器設(shè)備
4.2.1溫度深度剖面試驗(yàn)海區(qū)的溫度深度剖面隨測量時(shí)間、測量區(qū)域等發(fā)生變化,例如,日間由于陽光照射原因,海洋表面至水下深度30 m處溫度變化一般為1~2℃,夜間海洋表面至水下深度40 m處的溫度變化一般為3~4℃。圖5為水下滑翔機(jī)采集到的典型溫度深度剖面(第5航次第1航段第一周期下潛剖面,時(shí)間:6月12日9:04~9:55),圖中顯示在該時(shí)間段AUG-5試驗(yàn)區(qū)域0~水下40 m基本沒有變化,水下40 m~水下75 m溫度由29℃變化到了22℃。

圖5 試驗(yàn)海區(qū)典型溫度深度剖面
4.2.2海水電導(dǎo)率水下滑翔機(jī)第5航次采集到的電導(dǎo)率變化曲線見圖6,電導(dǎo)率隨深度的增加而下降,基本上同溫度的變化趨勢相當(dāng),水下滑翔機(jī)下潛過程中,所測得的電導(dǎo)率從海水表面的59.73 ms/cm降到33.01 ms/cm(水下503.7 m處)。

圖6 試驗(yàn)海區(qū)電導(dǎo)率變化曲線
4.2.3葉綠素和溶解氧濃度水下滑翔機(jī)第5航次采集到的葉綠素和溶解氧濃度變化曲線見圖7和圖8,基本的變化趨勢是:葉綠素濃度隨深度的增加而增加,溶解氧濃度隨深度的增加而減小。
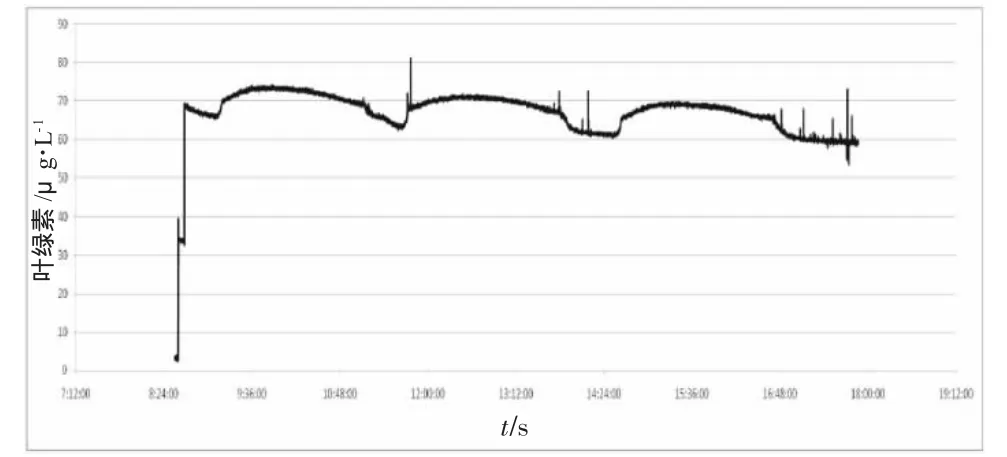
圖7 試驗(yàn)海區(qū)葉綠素變化曲線

圖8 試驗(yàn)海區(qū)氧濃度變化曲線
5 結(jié)論
本次海上試驗(yàn)水下滑翔機(jī)最大工作深度達(dá)到503.7 m,在4級(jí)海況下完成了通信定位、數(shù)據(jù)傳輸、布放與回收作業(yè),水中航行里程總計(jì)41.2 km,單個(gè)航次連續(xù)不間斷運(yùn)行60.5 h(進(jìn)行36個(gè)300 m級(jí)剖面測量),共獲得各個(gè)海洋深度剖面測量數(shù)據(jù)76個(gè)(其中300 m以上深度剖面測量數(shù)據(jù)71個(gè)),總計(jì)周期數(shù)為234個(gè)。水下滑翔機(jī)第二次海上試驗(yàn)搭載了CTD、葉綠素和溶解氧濃度傳感器進(jìn)行海洋環(huán)境參數(shù)測量,獲得了500 m深度剖面內(nèi)的溫度、電導(dǎo)率、葉綠素濃度和溶解氧濃度參數(shù)信息,并可進(jìn)一步獲得鹽度和密度數(shù)據(jù)。本次海上試驗(yàn)對(duì)水下滑翔機(jī)樣機(jī)系統(tǒng)和設(shè)備在海洋環(huán)境下的功能進(jìn)行測試,檢驗(yàn)水下滑翔機(jī)樣機(jī)在海洋環(huán)境下的作業(yè)功能和綜合性能;為海洋環(huán)境水下滑翔機(jī)設(shè)計(jì)定型及海上應(yīng)用示范奠定了基礎(chǔ)。
[1]龐重光,連喜虎,俞建成.水下滑翔機(jī)的海洋應(yīng)用[J].海洋科學(xué),2014,38(4):96-100
[2]MilesT,SerokaG,KohutJ,etal.GliderObservationsand ModelingofSedimentTransportin HurricaneSandy[J].JournalofGeophysical Research Oceans,2015,120(3):1-21.
[3]Miles Travis,Lee Sang Hoon,W?hlin Anna,et al.Glider Observations of the Dotson Ice Shelf Outflow[J].Deep Sea Research Part II Topical Studies in Oceanography,2016,123:16-29.
[4]Zaba,Katherine D,Rudnick,Daniel L.The 2014-2015 Warming Anomaly in the Southern California Current System Observed by Underwater Gliders[J].Geophysical Research Letters,2016,43(3):1241-1248.
[5]J Sherman,R E Davis,WB Owens,et al.The AutonomousUnderwater Glider“Spray”[J].IEEE Journal ofOceanic Engineering,26(4):437-446,2001.
[6]楊燕,孫秀軍,王延輝.淺海型水下滑翔機(jī)技術(shù)研究現(xiàn)狀分析[J].海洋技術(shù)學(xué)報(bào),2015,34(4):7-14.
[7]程雪梅.水下滑翔機(jī)研究進(jìn)展及關(guān)鍵技術(shù)[J].魚雷技術(shù),2009,17(6):1-6.
[8]溫浩然,魏納新,劉飛.水下滑翔機(jī)的研究現(xiàn)狀與面臨的挑戰(zhàn)[J].船舶工程,2015,39(1):1-6.
[9]馬冬梅,馬崢,張華,等.水下滑翔機(jī)水動(dòng)力性能分析及滑翔姿態(tài)優(yōu)化研究[J].水動(dòng)力學(xué)研究與進(jìn)展,2007,22(6):703-708.
[10]李志偉,崔維成.水下滑翔機(jī)水動(dòng)力外形研究綜述[J].船舶力學(xué),2012,16(7):829-837.
[11]王樹新,劉方,邵帥,等.混合驅(qū)動(dòng)水下滑翔機(jī)動(dòng)力學(xué)建模與海試研究[J].機(jī)械工程學(xué)報(bào),2014,50(2):19-27.
[12]崔維成,劉峰,胡震,等.蛟龍?zhí)栞d人潛水器的7000米級(jí)海上試驗(yàn)[J].船舶力學(xué),2012,16(10):1131-1143.
[13]崔維成,劉峰,胡震,等.蛟龍?zhí)栞d人潛水器的5000米級(jí)海上試驗(yàn)[J].中國造船,2012,52(3):1-14.
Research on the Sea Trial for Underwater Gliders
LIU Tong-mu1,CHEN Lu-yu2
1.South China Sea Marine Survey and Technology Center of State Oceanic Administration,Guangzhou 510310,Guangdong Province,China;
2.China Ship Scientific Research Center,Wuxi 214082,Jiangsu Province,China
The sea trials for the underwater glider prototype"Sea flight 1"in 2015 in the South China Sea are introduced,including the testing object,testing area,testing procedure and testing data analysis.In this sea trial,the maximum dive depth is 503.7 m,maximum vertical velocity is 0.15 m/s,maximum horizontal speed is 0.33 m/s,and its total course in the water is 41.2 km.Under the class 4 sea state,communication positioning,as well as data transmission,distribution and recovery operation of the underwater glider is completed,which is equipped with CTD,and chlorophyll and dissolved oxygen concentration sensors for marine environment measurement,obtaining parameters of temperature,conductivity,chlorophyll concentration and dissolved oxygen concentration in the 500 m depth profile.This sea trial lays the foundation for the design,demonstration and application of underwater glider products.
underwater glider;unmanned underwater vehicle(UUV);sea trials
U674.941;P715.5
A
1003-2029(2016)04-0006-05
10.3969/j.issn.1003-2029.2016.04.002
2016-05-29
海洋公益性行業(yè)科研專項(xiàng)經(jīng)費(fèi)資助項(xiàng)目(201205035)
劉同木(1980-),男,碩士,工程師,主要研究方向?yàn)楹Q箅x岸觀測技術(shù)。E-mail:liutongmu@smst.gz.cn
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂學(xué)習(xí)報(bào)·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57
