點吸收式波浪能發(fā)電技術(shù)的研究現(xiàn)狀與展望
2016-10-25 08:47:18楊紹輝何宏舟
海洋技術(shù)學(xué)報 2016年3期
楊紹輝,何宏舟,李 暉,張 軍
(1.集美大學(xué) 機械與能源工程學(xué)院,福建 廈門 361021;
2.福建省能源清潔利用與開發(fā)重點實驗室,福建 廈門 361021;
3.福建省清潔燃燒與能源高效利用工程技術(shù)研究中心,福建 廈門 361021)
點吸收式波浪能發(fā)電技術(shù)的研究現(xiàn)狀與展望
楊紹輝1,2,3,何宏舟1,2,3,李暉1,2,3,張軍1,2,3
(1.集美大學(xué) 機械與能源工程學(xué)院,福建廈門361021;
2.福建省能源清潔利用與開發(fā)重點實驗室,福建廈門361021;
3.福建省清潔燃燒與能源高效利用工程技術(shù)研究中心,福建廈門361021)
通過分析波浪能利用背景,提出點吸收式波浪能發(fā)電技術(shù)是波浪能開發(fā)利用的一種重要方式。以安裝位置、能量傳遞方式和振蕩浮子個數(shù)對點吸收式波浪能發(fā)電裝置進行了分類。結(jié)合研究現(xiàn)狀,對各類點吸收波浪能收集、轉(zhuǎn)化和傳遞方法及其應(yīng)用的優(yōu)缺點進行了綜合比較和分析。結(jié)果表明:安裝于離岸10~25 m處,以多個振蕩浮子組成的浮子陣列為能量攝取機構(gòu),以液壓或直線電機為能量傳遞方式是目前點吸收波浪能發(fā)電技術(shù)的研究熱點,在波浪能利用領(lǐng)域具有廣闊的發(fā)展前景。
波浪能;點吸收;液壓傳遞;直驅(qū)式;陣列式
波浪能是一種清潔的海洋可再生能源,由于具有綠色環(huán)保和儲量豐富的特點,日益受到科研工作者的廣泛關(guān)注[1-2]。至2011年,全世界已經(jīng)提出了超過4 000種波浪能轉(zhuǎn)換技術(shù)[3-5]。根據(jù)查詢中國知識產(chǎn)權(quán)網(wǎng)數(shù)據(jù)庫,1980年后至2014年期間,中國公開的波浪能發(fā)電相關(guān)專利技術(shù)已達到1 086件,而在歐洲僅2009年就有超過1 000件與波浪能轉(zhuǎn)化相關(guān)的專利技術(shù)公布[6]。波浪能開發(fā)技術(shù)的研究目前處于加速發(fā)展的趨勢。
按照波浪能俘獲收集方法,可將其分為振蕩水柱式、筏式、擺式、鴨式、越浪式和點吸收式等類型[2]。點吸收式波浪能俘獲技術(shù)主要利用振蕩浮子在波浪力作用下的升沉運動收集波浪能,由于具有轉(zhuǎn)化效率高、建造難度小、投資成本少、不受波浪方向影響等優(yōu)點[7-8],受到了廣泛的重視。對文獻[6]提出的157種波浪能發(fā)電裝置進行統(tǒng)計分析,發(fā)現(xiàn)點吸收式技術(shù)研究占比為46.3%,遠超過其它類型,如圖1所示。目前,點吸收式作為其中研究最多、最具特色的一種波浪發(fā)電技術(shù),還未見有文獻進行過有針對性的整理和分析。因此,本文首先對點吸收式波浪能發(fā)電技術(shù)進行了分類,然后結(jié)合分類方法詳細敘述了點吸收式波浪能發(fā)電技術(shù)發(fā)展現(xiàn)狀,最后說明了其發(fā)展前景和趨勢。
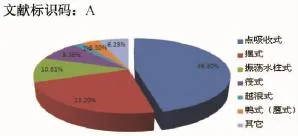
圖1 各種類型波浪能俘獲技術(shù)研究占比圖
1 點吸收式波浪能技術(shù)的研究現(xiàn)狀
1.1分類方法
圖2為點吸收式波浪能發(fā)電裝置的分類圖。如圖所示,可按照其安裝位置分為沿岸式、近岸式和離岸式;按照波浪能轉(zhuǎn)化傳遞的方式可將其分為機械式、水壓式、液壓式、直線電機式、壓電式和磁流體式等;按照同一套裝置具有振蕩浮子個數(shù)將其分為單點式、組合式和陣列式。
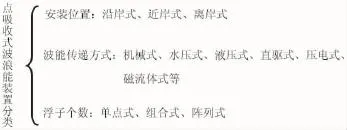
圖2 點吸收式波浪能發(fā)電裝置的分類方法
1.2安裝位置的分類與比較
圖3所示為按照安裝位置可將點吸收式波浪能發(fā)電裝置分為沿岸式、近岸式和離岸式[6]。沿岸式裝置是指可安裝在海岸邊或固定在高于海平面的防波堤和巖石上的波浪能發(fā)電裝置,其優(yōu)勢在于離陸地近,便于安裝與維護,不需要錨定裝置和較長的電能輸送電纜;但是一般該位置波浪能資源不太豐富,而且會對岸上環(huán)境造成影響。近岸式裝置一般是安裝在10~25 m水深處,即可漂浮在海面上也可附著于海底,目前大多數(shù)點吸收式波浪能發(fā)電裝置屬于近岸式裝置。離岸式裝置一般是指安裝在水深超過40 m的深海處的波浪能裝置,此處的波浪資源豐富,但由于遠離陸地,設(shè)備的安裝和維護比較困難,而且需要較長的海底電纜將能量輸送到陸地[6,9-10]。
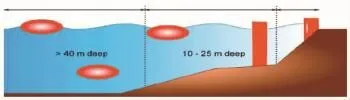
圖3 點吸收式波浪能發(fā)電裝置的安裝位置
1.3波浪能傳遞方式的分類和比較
(1)機械式
點吸收機械式波浪發(fā)電裝置一般在振蕩浮子上連接齒條、繩輪或連桿吸收波浪能,然后利用超越離合器、棘輪、齒條或鏈輪等設(shè)備,將浮子的上下升沉運動轉(zhuǎn)化為旋轉(zhuǎn)軸的單向旋轉(zhuǎn)運動,利用增速齒輪箱將轉(zhuǎn)速提高,采用飛輪蓄能,最后驅(qū)動發(fā)電機發(fā)電。機械傳遞裝置具有能量傳遞效率高(可達90%以上)、結(jié)構(gòu)簡單、造價較低等優(yōu)點,但同時也有易被海水腐蝕、維護成本較高、不容易實現(xiàn)控制調(diào)節(jié)的缺點。
如圖4(a)為2006年美國提出的浮動輪式點吸收波浪能發(fā)電裝置原理示意圖[11]。該裝置的浮子上直接連接滑動輪,系泊繩通過滑動輪,一端連接較小配重,另一端固定于海底。當浮體隨波浪上下沉浮時,配重也在上下垂蕩,從而帶動系泊繩驅(qū)使滑動輪轉(zhuǎn)動,滑動輪連接交流發(fā)電機輸出電能。圖4(b)為日本研制的繩輪-棘輪式點吸收波浪能發(fā)電裝置原理圖[11]。該裝置通過繩索的張緊力和浮子與配重的重量差發(fā)電,浮子通過繩輪連接到轉(zhuǎn)動式發(fā)電機上。當浮體上升時,繩輪按順時針方向轉(zhuǎn)動,當浮體下落時,繩輪轉(zhuǎn)動方向相反,繩輪的往復(fù)轉(zhuǎn)動通過棘輪裝置轉(zhuǎn)化為單向轉(zhuǎn)動后帶動發(fā)電機發(fā)電。
圖4(c)為山東大學(xué)于2013年提出的一種浮體繩輪式波浪能發(fā)電裝置[12],由重力錨、拉繩、導(dǎo)繩器、發(fā)電機組、阻性負載、圓柱浮體等構(gòu)成,拉繩一端系于海底的重力錨上,另一端經(jīng)導(dǎo)繩器纏繞在發(fā)電機組的卷筒上,當波浪推動浮體上升時,拉繩拖動卷筒旋轉(zhuǎn),卷筒直接驅(qū)動低速同步永磁交流發(fā)電機發(fā)電;當浮體隨波浪下降時,卷筒在電機內(nèi)置卷簧的作用下實現(xiàn)自動收繩,由于卷筒與電機軸之間裝有超越離合器,卷筒回轉(zhuǎn)時電機轉(zhuǎn)子并不旋轉(zhuǎn),浮體在下降過程中不發(fā)電,因此具有半波發(fā)電特征。

圖4 點吸收繩輪式波浪能發(fā)電裝置原理
中山大學(xué)提出了一種齒條傳遞點吸收波浪能發(fā)電系統(tǒng)。該裝置主要由基座、振蕩浮子、齒條傳動系統(tǒng)、定向系統(tǒng)(齒輪裝置)、儲能系統(tǒng)(飛輪)和發(fā)電機組成[11],參見圖5。該裝置于2012年在陽江市海陵島進行了海試試驗,設(shè)計發(fā)電功率為20 kW。

圖5 點吸收齒條傳動式波浪能發(fā)電裝置
(2)水壓式
點吸收水壓式波浪能發(fā)電裝置一般包括三級能量轉(zhuǎn)化過程,其工作原理是首先通過振蕩浮子帶動軟囊或活塞等裝置將波浪能轉(zhuǎn)換成高壓海水的壓力能,高壓海水驅(qū)動水輪機旋轉(zhuǎn),水輪機再帶動發(fā)電機發(fā)電。
如圖6為IPS Buoy水壓式波浪能發(fā)電裝置,圖中A為振蕩浮子,加速管B兩端開放,C為活塞,D為水輪機。浮子A隨波浪上下運動,驅(qū)動活塞C垂直運動,活塞C擠壓加速管內(nèi)部的水柱,被排出的水柱驅(qū)動水輪機D旋轉(zhuǎn),并帶動發(fā)電機發(fā)電[13]。根據(jù)海試試驗表明[14],IPS波浪能轉(zhuǎn)化裝置的發(fā)電效率可達到30%~35%,據(jù)測算每個直徑為10 m的IPS振蕩浮子,可輸出電功率150~250 kW,每年可生產(chǎn)1.4 GWh電能。
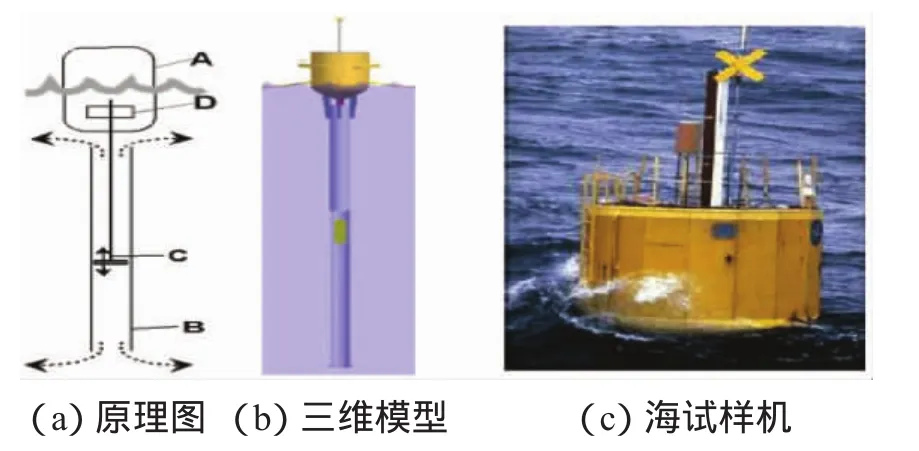
圖6 IPS Buoy點吸收水壓式波浪能發(fā)電裝置
加拿大Finavera可再生能源公司在俄勒岡州紐波特海岸以IPS Buoy原理為基礎(chǔ),開發(fā)完成了42座AquaBuoy波浪能轉(zhuǎn)化裝置,并將其按陣列方式布放,形成了大規(guī)模波浪能發(fā)電廠,如圖7所示,每個振蕩浮子直徑6.1~9.6 m[15],可根據(jù)裝機容量調(diào)整振蕩浮子的數(shù)量。

圖7 AquaBuoy波浪能發(fā)電廠
圖8所示為中科院廣州能源所提出的點吸收柔性泵波浪能轉(zhuǎn)化裝置,主要由4部分組成,包括振蕩浮子、柔性泵、圓形水下附體和錨系。柔性泵由具有一定彈性的柔性面和閥門等構(gòu)成。當波峰到來時,浮子向上運動,驅(qū)動柔性泵的柔性面拉伸,造成泵內(nèi)部海水壓力低于外部海水壓力,具有一定壓頭的海水通過單向閥流入柔性泵,波浪能以海水液壓能的方式蓄存在柔性泵內(nèi);當波谷到來時,浮子向下運動,在彈性作用下,柔性面驅(qū)動海水通過單向閥,驅(qū)動發(fā)電機發(fā)電[16]。
(3)液壓式
點吸收液壓式波浪能發(fā)電裝置主要利用液壓缸、蓄能器、液壓馬達等液壓裝置傳遞其波浪能量,也包括三級能量轉(zhuǎn)化過程,首先浮子吸收波浪能,然后驅(qū)動液壓缸活塞往復(fù)運動,轉(zhuǎn)化為液壓油的液壓能沖擊液壓馬達單向旋轉(zhuǎn),帶動旋轉(zhuǎn)電機發(fā)電。美國的Electric Buoy、愛爾蘭的Wave Bob、瑞士的Ocean Harvest[9]等點吸收式波浪能發(fā)電裝置均采用液壓傳遞波浪能。
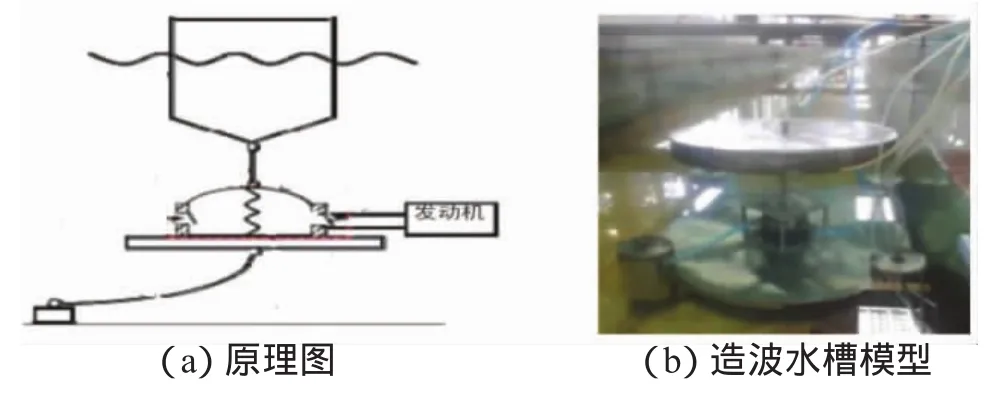
圖8 點吸收柔性泵波浪能發(fā)電裝置
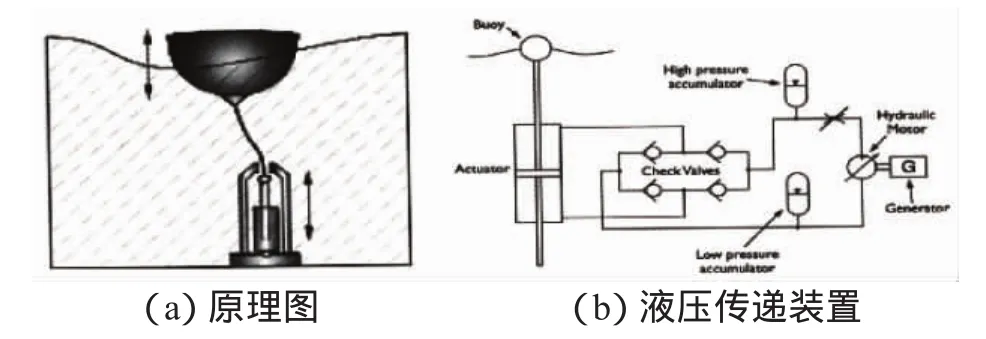
圖9 點吸收液壓式波浪能發(fā)電裝置原理
Wavebob(如圖10所示)是由愛爾蘭研發(fā)的點吸收液壓波浪能發(fā)電系統(tǒng)[17]。它包含兩個軸對稱的同軸浮體,上部的浮體與下部全淹沒的浮體為剛性連接,設(shè)計的目的在于增大裝置慣性并調(diào)節(jié)設(shè)備與平均入射波頻率的匹配,兩浮體之間的相互垂蕩運動通過液壓設(shè)備實現(xiàn)。圖11(a)所示,2006年中科院廣州能源所建成了50 kW岸式振蕩浮子發(fā)電站,采用液壓傳遞波浪能量,圖11(b)所示,國內(nèi)山東大學(xué)開發(fā)完成了120 kW漂浮點吸收式液壓波浪發(fā)電系統(tǒng)。

圖10 Wavebob點吸收液壓波浪能發(fā)電系統(tǒng)

圖11 點吸收式液壓波浪發(fā)電海試樣機
隨著陣列式點吸收波浪裝置的發(fā)展(詳見1.3節(jié)),丹麥的Aalborg大學(xué)提出了能夠?qū)⒍帱c波浪能同時轉(zhuǎn)化為液壓能的液壓裝置[17],如圖12所示,該液壓傳遞裝置能夠同時將多點波浪能轉(zhuǎn)化成液壓能。

圖12 多點液壓波浪能轉(zhuǎn)化裝置
海洋波浪能是不穩(wěn)定、不連續(xù)和具有突變性的一次能源,這會對波浪能發(fā)電裝置造成不同程度的沖擊,使裝置的可靠性和穩(wěn)定性受到影響。而液壓轉(zhuǎn)化傳遞系統(tǒng)具有柔性傳輸、蓄能穩(wěn)壓、扭矩大、便于調(diào)控等特點,通過液壓轉(zhuǎn)化傳遞系統(tǒng)將波浪能轉(zhuǎn)換為電能,可以使能量得到緩沖以提高電能質(zhì)量且可以在波況較小的情況下蓄積波浪能,實現(xiàn)波浪能向電能的持續(xù)穩(wěn)定轉(zhuǎn)換。近年來,液壓傳動已逐漸成為點吸收式波浪能利用裝置的一種主要能量傳遞方式。
(4)直驅(qū)式
直驅(qū)式點吸收波浪能發(fā)電裝置主要發(fā)電設(shè)備為直線發(fā)電機。振蕩浮子和永磁直線電機的動子連接為一體,能最大限度地提取波浪能[18]。圖13(a)所示,其原理是在波浪力的作用下,振蕩浮子跟隨波浪做上下的往復(fù)運動,從而使得直線電機的動子跟定子之間產(chǎn)生相對運動,切割磁力線,完成由波浪能向電能的轉(zhuǎn)換過程。相比旋轉(zhuǎn)發(fā)電系統(tǒng),直驅(qū)式波浪發(fā)電系統(tǒng)將波浪能直接轉(zhuǎn)換為電能,不需要中間轉(zhuǎn)換裝置,具有結(jié)構(gòu)簡單、轉(zhuǎn)換效率高等優(yōu)點[19]。
圖13(b)所示美國俄勒岡州立大學(xué)提出的波浪能非接觸轉(zhuǎn)換裝置L-10原理圖[20],該裝置提出了非接觸轉(zhuǎn)換概念,利用永磁鐵和金屬之間的非接觸作用力,通過滾珠絲杠和滾珠螺母將直線運動轉(zhuǎn)化為旋轉(zhuǎn)運動,帶動永磁直線發(fā)電機產(chǎn)生電能。該裝置額定功率10 kW的原型樣機2008年9月在俄勒岡州紐波特進行了海試,其浮子直徑為3.5 m,裝置高6.7 m,裝置效率超過50%。
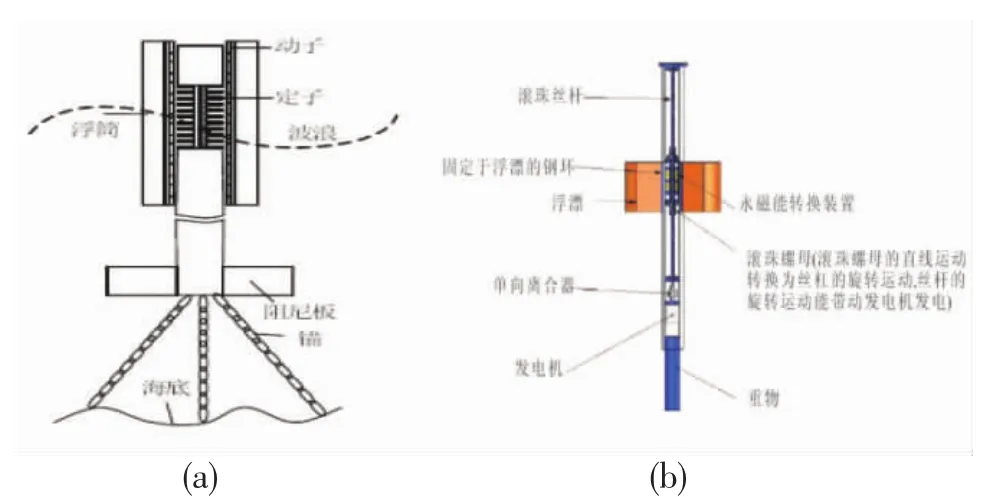
圖13 點吸收直驅(qū)式波浪能發(fā)電原理
圖14(a)所示為英國的阿基米德波浪擺(AWS)[21]原理圖。它由做垂蕩運動的上部浮子和與海底固定的下部結(jié)構(gòu)兩部分組成,兩部分在工作時均淹沒于水下,浮體于波峰時向下運動,波谷時向上運動,從而驅(qū)動直線電機運動。圖14(b)所示為AWS海試樣機,于2004年進行海試。
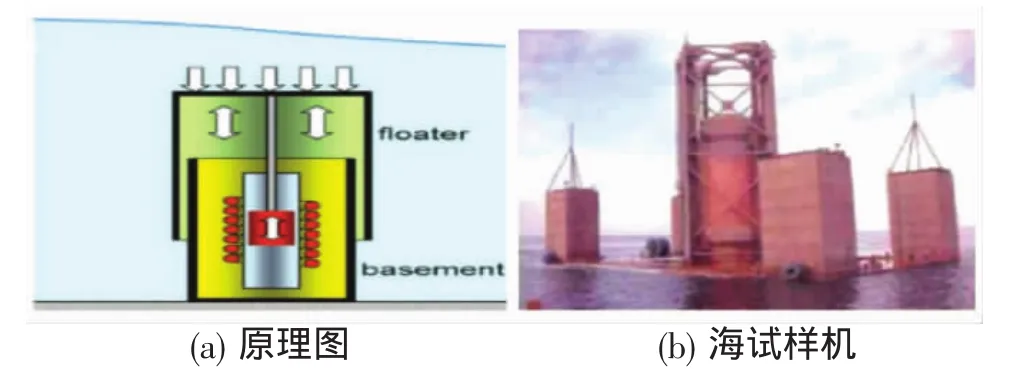
圖14 阿基米德波浪擺(AWS)
圖15(a)所示為美國的Power Buoy海試裝置[22]。2006年美國OPT公司研制的PowerBuoy波力設(shè)備在英國北部完成了6次海上試驗。圖15(b)所示為中科院廣州能源所研制的“哪咤1號”直驅(qū)式海試裝置,總高約14 m,總重28 t,振蕩浮子半徑為2 m,厚度為1.5 m,水下阻尼板半徑為3 m,厚度為0.8 m,設(shè)計發(fā)電功率為10 kW,海試時最高輸出相電壓381 V[23]。
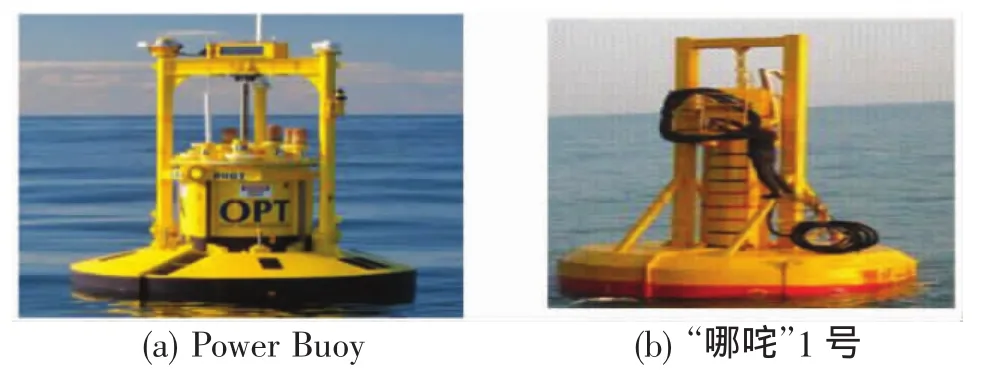
圖15 直驅(qū)式波浪能發(fā)電海試樣機
(5)磁流體式
圖16為點吸收磁流體式波浪發(fā)電的基本原理圖。如圖所示,當振蕩浮子受波浪力作用往上運動,帶動活塞桿往上運動,裝有液態(tài)金屬的波紋管受到擠壓,液態(tài)金屬流過發(fā)電通道進入下部波紋管內(nèi),完成一個單向運動過程,而當振蕩浮子在波浪力作用下向下運動時,液態(tài)金屬也反向運動。液態(tài)金屬往復(fù)通過磁體時,切割其磁力線產(chǎn)生電能。
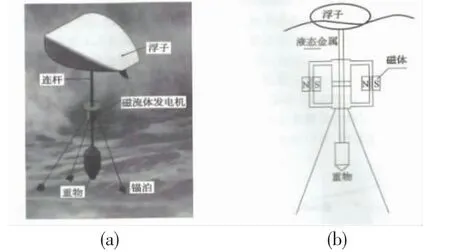
圖16 點吸收磁流體波浪能發(fā)電原理
磁流體式波浪能發(fā)電裝置與直驅(qū)式波力裝置一樣,沒有中間轉(zhuǎn)化裝置,能源傳遞效率高、功率密度大、結(jié)構(gòu)緊湊、成本較低,因此具有較好的發(fā)展前景。但由于研究時間較短,目前點吸收磁流體式波浪能發(fā)電裝置仍處于專利申請、理論研究和實驗驗證階段。美國在2008年研制出一臺100 kW磁流體波浪能發(fā)電實驗樣機。圖17所示,我國中科院電工所研制了一臺仿真實驗樣機,最大輸出電功率為209 W[24]。
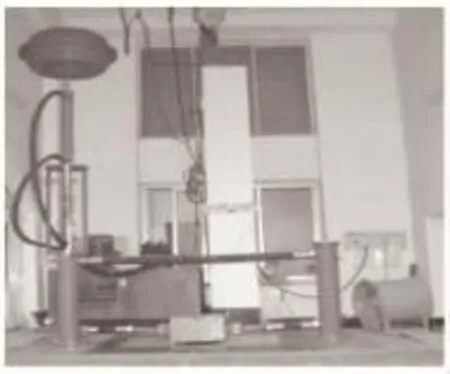
圖17 LMMHD仿真實驗裝置
1.4振蕩浮子個數(shù)的分類與比較
按照吸收波浪能的振蕩浮子個數(shù)多少可分為單點式、組合式和陣列式。單點式裝置是指只有一個振蕩浮子的波浪能轉(zhuǎn)化裝置;組合式裝置指具有2個或少數(shù)幾個振蕩浮子的波浪能轉(zhuǎn)化裝置,通過各個振蕩浮子之間的相對運動吸收波浪能;而陣列式是指同時具有大量振蕩浮子,能夠?qū)σ欢娣e海域內(nèi)多個位置的波浪能同時進行吸收的波浪能轉(zhuǎn)化裝置。圖18所示為各種分類的示例圖。
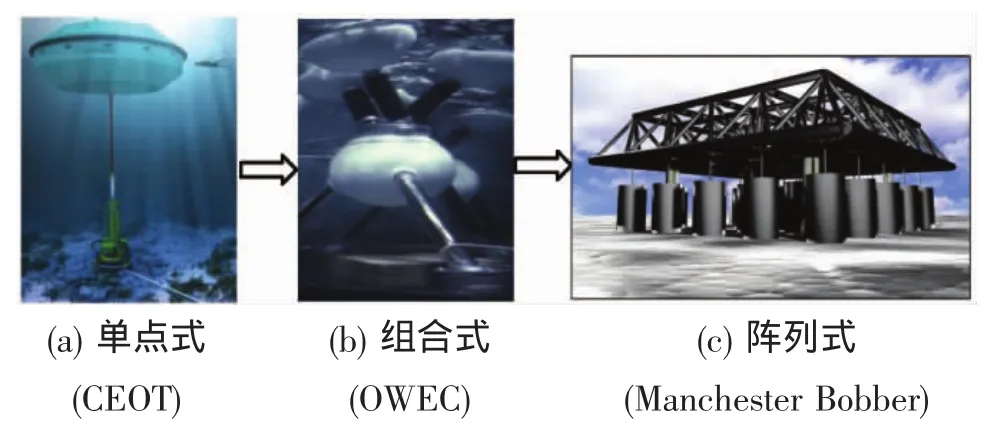
圖18 按振蕩浮子個數(shù)分類
由于單點吸收式波浪能轉(zhuǎn)化裝置只能利用一個振蕩浮子來收集波浪能,受到單個振蕩浮子體積、重量等因素的影響,其吸收波浪能的總功率受到限制,導(dǎo)致波浪能利用成本較高,已不能滿足大規(guī)模收集波浪能發(fā)電的要求。與單點吸收式波浪能裝置比較,組合式與陣列式波浪能裝置的優(yōu)勢在于可同時利用多個振蕩浮子收集波浪能,大規(guī)模發(fā)電,波浪能收集也更為連續(xù)、均勻[25-26],也可減小振蕩浮子的體積和重量,便于浮子的制造和運輸。
英國愛丁堡大學(xué)的Benjamin F.M.Child博士對5個浮子組成的浮子陣列在不同浮子間距和不同布放方式等情況下進行了分析,結(jié)果顯示,在優(yōu)化狀態(tài)下浮子陣列比單個浮子具有更高的采能效率[28]。挪威科技大學(xué)的Johannes Falnes等人通過研究后提出了“Small is beautiful”[29]的觀點,證明了浮子陣列比單個浮子更有利于波浪能的吸收。近一階段,越來越多的學(xué)者和科技公司已開始注重陣列式波浪能發(fā)電裝置的研究和開發(fā)。在國外,如圖7所示的AquaBuoy波浪能發(fā)電廠以及Manchester Bobber、FO3、Wave Star等均屬于陣列式裝置。
比利時Ghent大學(xué)Manchester Bobber波力裝置為研究對象在實驗室的造波水槽中進行了5×5個振蕩浮子陣列的波能轉(zhuǎn)化實驗,重點研究浮子之間的相互影響。如圖19所示該實驗中每個振蕩浮子直徑為0.35 m,每兩個浮子之間的距離為1.575 m。實驗結(jié)果顯示浮子陣列能夠較好地吸收來自各個方向的波浪能量[27]。
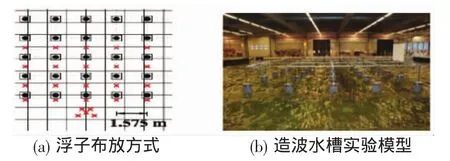
圖19 Manchester Bobber陣列式波浪能發(fā)電裝置
挪威奧斯陸大學(xué)開發(fā)的FO3波力發(fā)電裝置于2003年在實驗室水槽中進行了1:20的模擬實驗,實驗裝置同時具有21個振蕩浮子,如圖20(a)所示。該裝置2005年在挪威南部海岸進行了1:3比尺的實海況實驗,如圖20(b)所示。
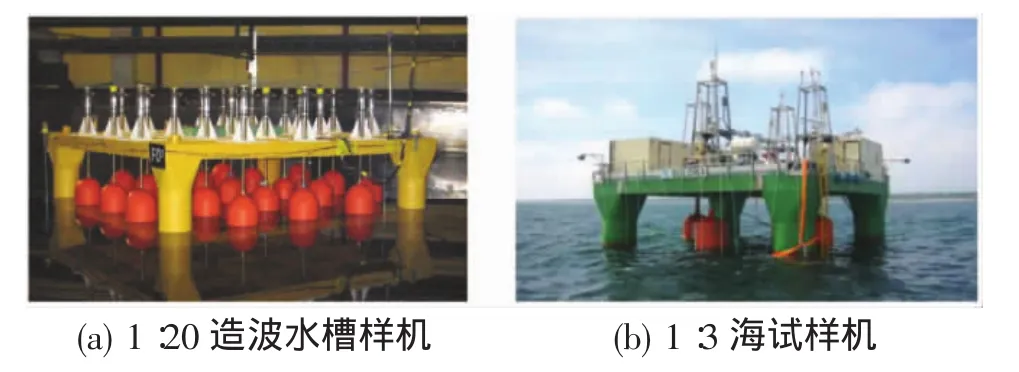
圖20 FO3陣列式波浪能發(fā)電裝置
丹麥的Aalborg大學(xué)提出了Wave Star陣列式波力發(fā)電裝置,于2004年進行了1:40比尺的造波水槽實驗,共包括40組浮子,每組浮子直徑為0.25 m;2006-2010年期間在丹麥的Nissum Bredning海灣進行了1:10比尺的實海況實驗,20組振蕩浮子,每組浮子直徑為 1.0 m;2010年后又在丹麥的Hanstholm灣進行了1:2比尺的實海況實驗,共包括2組振蕩浮子,每組浮子直徑為5 m。通過理論計算和多組測試結(jié)果分析,當Wave Star波力發(fā)電裝置總長為70 m,具有20個直徑為5 m的振蕩浮子,安裝在10~15 m水深的海域處,波浪波高為2.5 m時,可輸出的電功率為600 kW;而當其總長為140 m,具有20個直徑為5 m的振蕩浮子,安裝在20~30 m水深的海域處,當波浪波高為5 m時,裝置則可輸出6 MW電功率。即裝置尺寸增加1倍,輸出的電功率將增加10倍[30]。
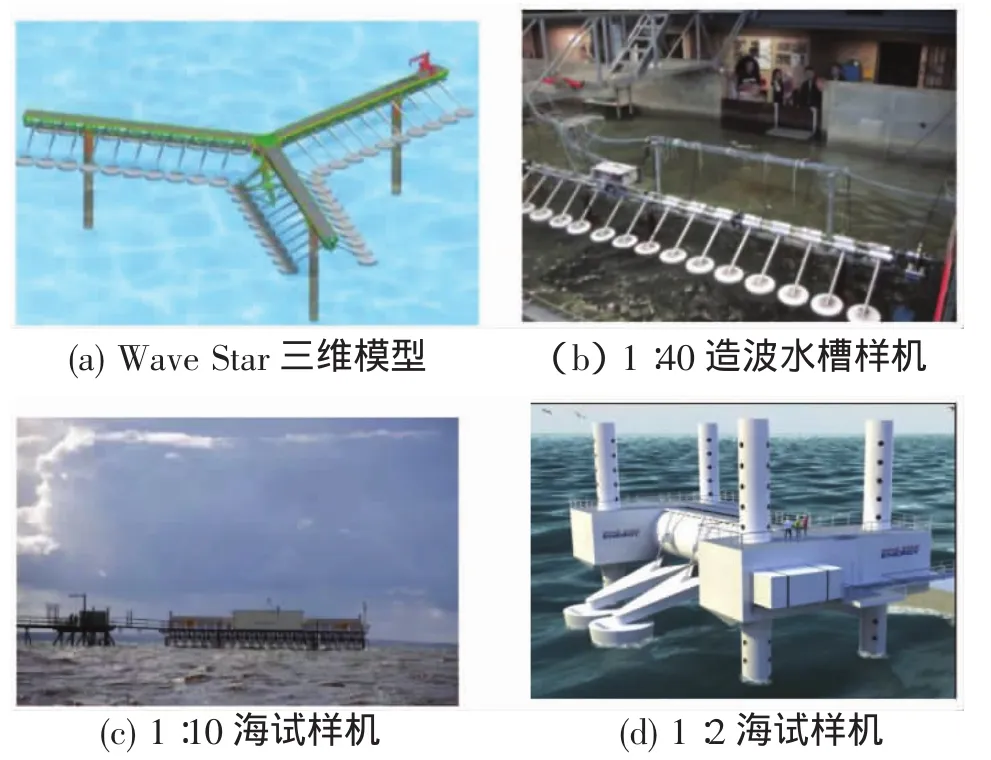
圖21 Wave Star陣列式波浪能發(fā)電裝置
在國內(nèi),陣列式波浪能裝置也逐漸引起了重視。香港大學(xué)2006年開發(fā)了Motor Wave陣列式波浪能發(fā)電裝置。浙江海洋大學(xué)2013年進行了“海院1號”波力發(fā)電平臺的開發(fā),該平臺同時具備3個振蕩浮子,每個振蕩浮子直徑3.2 m,高度1.46 m,最大波能采集效率達到49.1%,平均波能發(fā)電效率為15.2%[31-32]。

圖22 “海院1號”波力發(fā)電平臺
集美大學(xué)于2014年6-12月進行了“集大1號”波浪能發(fā)電平臺的開發(fā)。“集大1號”設(shè)計為漂浮平臺,平臺兩側(cè)各安裝5個振蕩浮子,每個振蕩浮子重量為200 kg,長度為1.8 m,高度為1 m,平臺的理論發(fā)電效率可達到31.7%,實際海試時最佳發(fā)電效率為26.9%。平臺既可安裝于近海也可安裝于深海,不受水深限制;并可根據(jù)波浪方向,繞錨定裝置自由旋轉(zhuǎn),實現(xiàn)自對浪功能;平臺具有正常和抗風(fēng)浪兩種運行模式,在臺風(fēng)巨浪情況下,多個振蕩浮子能夠升起,減小沖擊。
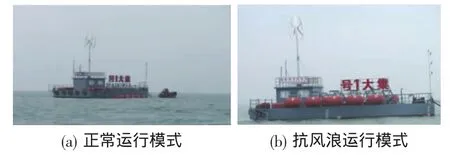
圖23 “集大1號”波浪能發(fā)電平臺
2 點吸收式波浪能技術(shù)的發(fā)展趨勢
點吸收式波浪能發(fā)電裝置種類繁多、日趨多樣化,許多國家建立了實海況樣機來測試裝置的性能,并已有多座應(yīng)用該技術(shù)的波浪能示范電站建成。點吸收式波浪能發(fā)電裝置的研究涉及到復(fù)雜的海洋環(huán)境、相關(guān)系統(tǒng)的控制理論、海洋結(jié)構(gòu)物的穩(wěn)定性、可靠性等問題,未來發(fā)展趨勢和重點研究的內(nèi)容如下:
(1)早期的點吸收式波浪能發(fā)電技術(shù)涉及的只是專利申請和理論研究,裝置樣機在實際海洋環(huán)境中運行的較少。目前,越來越多海試樣機已投入實際海況中運行,通過實海況試驗研究裝置的結(jié)構(gòu)性能、發(fā)電效率、安全性等問題。
(2)由于涉及到復(fù)雜的海洋波浪和結(jié)構(gòu)物間的作用,所以通過理論和仿真方法分析裝置結(jié)構(gòu)和性能,并在此基礎(chǔ)上進行試驗測試。這種理論計算結(jié)合模型試驗和實海況測試的研究方法已經(jīng)成為一種趨勢。
(3)目前大多數(shù)波浪能發(fā)電裝置為小規(guī)模單點式裝置,輸出功率仍在千瓦級以內(nèi)。只有向大規(guī)模化與綜合化發(fā)展,波浪能利用技術(shù)才能實現(xiàn)更好的商業(yè)化利用。因此,同時具有多個振蕩浮子的陣列式波浪能發(fā)電裝置,或?qū)⒍鄠€單點吸收式波浪能裝置以陣列形式布放形成大規(guī)模波浪能發(fā)電廠,可使得波浪能發(fā)電裝置裝機容量達到百萬瓦級,降低發(fā)電成本,提高發(fā)電效率。此外,未來綜合利用幾種采集波浪能原理的裝置或者與太陽能、風(fēng)能發(fā)電裝置相結(jié)合將會更有利于波浪能相關(guān)裝置的規(guī)模化并網(wǎng)利用。
(4)面對復(fù)雜海洋環(huán)境,如何把波浪能有效地轉(zhuǎn)換成機械能,進而產(chǎn)生穩(wěn)定、高效的電能是海洋波浪能技術(shù)領(lǐng)域的研究重點。通過控制策略的引入,對海洋環(huán)境因素進行反饋,將是未來點吸收式波浪能發(fā)電裝置能否投入實際應(yīng)用的關(guān)鍵。可通過相位控制技術(shù)、智能控制算法[26]、負反饋控制[33]等方式來提高點吸收式波浪能裝置的發(fā)電效率和發(fā)電穩(wěn)定性。
(5)如何提高在極端海洋條件下點吸收式波浪能裝置的生存能力也是未來研究的重點內(nèi)容。研制具有高可靠性(抗臺風(fēng)、耐腐蝕)、低造價的海洋波浪能發(fā)電裝置,是世界各海洋國家不懈追求的目標。
(6)點吸收式波浪能裝置不僅可為海面、水下及海島的各種監(jiān)測儀器、水下采礦系統(tǒng)、水下機器人、海上軍事設(shè)施、海上平臺等提供電力,還可開發(fā)點吸收式波浪能裝置直接驅(qū)動的海水淡化技術(shù),提高波浪能綜合應(yīng)用的能力,解決我國淡水資源嚴重缺乏的問題。
3 結(jié)論
綜上所述,點吸收式波浪能發(fā)電技術(shù)是波浪能開發(fā)利用裝置中研究最多的一種。從安裝位置上看,大多數(shù)點吸收波浪能發(fā)電裝置屬于近岸式。就波浪能傳遞技術(shù)比較而言,機械式傳遞效率高,但維護成本較高,不容易實現(xiàn)控制調(diào)節(jié);水壓式對環(huán)境無污染,但缺點是傳遞效率相對較低,所捕獲的波浪能能量密度小;液壓傳遞方式技術(shù)成熟,便于控制,但液壓式裝置可能泄漏液體及污染海水。直驅(qū)式波浪能轉(zhuǎn)換裝置直接把波浪能轉(zhuǎn)換成電能,只需要一級能量轉(zhuǎn)換,省略了二級能量轉(zhuǎn)換所帶來的費用、維護和能量損耗,具有可靠性高及維護成本低的優(yōu)勢;磁流體式具有直驅(qū)式的優(yōu)點,但仍處于實驗研究階段。因而,現(xiàn)階段利用液壓設(shè)備和直線電機更有利于波浪能量傳遞。與單點吸收式波浪能裝置比較,組合式與陣列式點吸收波浪能裝置可同時利用多個振蕩浮子收集波浪能,大規(guī)模發(fā)電,波浪能收集也更為連續(xù)、均勻。
因此,安裝于離岸10~25 m處,以多個振蕩浮子組成的浮子陣列為波浪能量攝取機構(gòu),液壓或直線電機為波浪能量傳遞方式的波浪能裝置已經(jīng)成為點吸收波浪能開發(fā)利用技術(shù)的主流和熱點。
[1]Clement A,Mcculien P,F(xiàn)alcao A,et al.Wave Energy in Europe:Current Status and Perspectives[J].Renewable and Sustainable EnergyReviews,2002,6(5):405-431.
[2]游亞戈,李偉,劉偉民,等.海洋能發(fā)電技術(shù)的現(xiàn)狀與前景[J].電力系統(tǒng)自動化,2010,34(14):1-12.
[3]Ross D,Ross D.Power fromthe Waves[M].Oxford:Oxford UniversityPress,1995.
[4]Salter SH.Wave Power[J].Nature,1974,249(5459):720-724.
[5]譚思明,秦洪花,趙霞,等.海洋波浪能領(lǐng)域國際專利競爭態(tài)勢分析[J].2011,39(9):14-17.
[6]Iraide López,Jon Andreu,Salvador Ceballos.Review of Wave Energy Technologies and the Necessary Power-Equipment[J].Renewable and Sustainable EnergyReviews,2013,27,413-433.
[7]Zhang Dahai,Li Wei,Lin Yonggang.Wave Energy in China:Current Status and Perspectives[J].Renewable Energy,2009,28(3): 126-132.
[8]A S Zurkinden,F(xiàn) Ferri,S Beatty,et al.Non-Linear Numerical Modeling and Experimental Testing of a Point Absorber Wave Energy Converter[J].Ocean Engineering,2014,78,11-21.
[9]AntónioF O Falc?o.Wave EnergyUtilization:A Reviewofthe Technologies[J].Renewable and Sustainable Energy Reviews,2010,14: 899-918.
[10]Czech B,Bauer P.Wave EnergyConverter Concepts:Design Challenges and Classification[J].Industrial Electronics Magazine,IEEE,2012,6:4-16.
[11]訚耀保.海洋波浪能綜合利用—發(fā)電原理與裝置[M].上海:上海科學(xué)技術(shù)出版社,2013.
[12]朱林森,曲言明,王延剛,等.浮體繩輪波浪發(fā)電效率的研究[J].太陽能學(xué)報,2014,35(8):1381-1386.
[13]António F O Falc?o,José J Candidoa,Paulo A P Justino,et al.Hydrodynamics of the IPS Buoy Wave Energy Converter Including the Effect ofNon-UniformAcceleration Tube Cross Section[J].Renewable Energy,2012,41:105-114.
[14]Weinstein A,F(xiàn)redrikson G,Claeson L,et al.Aquabuoy-the Offshore Wave Energy Converter Numerical Modeling and Optimization[J].OCEANS,2003,4:1988-1995.
[15]Wacher A,Neilsen K.Mathematical and Numerical Modeling of the AquaBuoy Wave Energy Converter[J].Mathematics in Industry Case Studies Journal,2010,22:16-33.
[16]林禮群,吳必軍.點吸收柔性泵波浪能裝置的設(shè)計與試驗研究[J].海洋技術(shù)學(xué)報,2014.33(4):25-29.
[17]Kramer M,Brorsen M,F(xiàn)rigaard P.Wave Star-Hydrodynamisk Interaktion Mellem5 Flydere[J].Hydraulics and Coastal Engineering,2004,7:1603-9874.
[18]Prudell J,Stoddard M,Amon E.A Permanent-Magnet Tubular Linear Generator for Ocean Wave Energy Conversion[J].IEEE Trans.on IndustryApplication,2010,46(6):2392-2400.
[19]劉春元,余海濤,胡敏強,等.永磁直線發(fā)電機在直驅(qū)式波浪發(fā)電系統(tǒng)的應(yīng)用[J].中國電機工程學(xué)報,2013,33(21):90-98.
[20]Clifton P C J,Mcmahon R A,Kelly H.Design and Commissioning ofa 30 kW Direct Drive Wave Generator[C]//5th IET International Conference on Power Electronics,Machines and Drives,Brighton,UK,2010:1-6.
[21]Polinder H,Damen ME C,Gardner F.Linear PMGenerator System for Wave Energy Conversion in the AWS[J].IEEE Transactions on EnergyConversion,2004,19(3):583-589.
[22]Prudell J,Stoddard M,Amon E,et al.A Permanent-Magnet Tubular Linear Generator for Ocean Wave Energy Conversion[J].IEEE Transactions on IndustryApplications,2010,46(6):2392-2400.
[23]吳必軍,刁向紅,王坤林,等.10 kW漂浮點吸收直線發(fā)電波力裝置[J].海洋技術(shù),2012,31(3):68-73.
[24]Xiao Teng,Peng Yan,Zhao Lingzhi,et al.Performance Analysis of Liquid Metal Magnetohy Drodynamic Generator for Wave Energy Conversion[J].Modern Scientific Instruments,2011,3:60-65.
[25]楊紹輝,何宏舟,曲泉鈾.多點直驅(qū)式波浪能發(fā)電系統(tǒng)仿真分析與試驗研究[J].太陽能學(xué)報,2014,35(9):65-72.
[26]楊紹輝,何宏舟.多點直驅(qū)式波浪能發(fā)電系統(tǒng)的恒轉(zhuǎn)速研究[J].太陽能學(xué)報,2014.35(5):889-895.
[27]Benjamin F MChild.On the Configuration of Arrays of Floating Wave Energy Converters[D].Edinburgh,UK:University of Edinburgh,2011.
[28]Johannes Falnes,Jφrgen Hals.Heaving Buoys,Point Absorbers and Arrays[J].Mathematical physical and Engineering Science,2012,370(12):246-277.
[29]Vasiliki Stratigaki,Peter Troch,Tim Stallard,et al.Wave Basin Experiments with Large Wave Energy Converter Arrays to Study Interactions Between the Converters and Effects on Other Users in the Sea and the Coastal Area[J].Energies,2014,7:701-734.
[30]Steenstrup P R.Wave Star Energy-NewWave EnergyConverter,Which is NowUnder GoingSea Trial in Denmark[C]//International Conference Ocean Energy,October,23-24th,2006,Bremerhaven,Germany.
[31]Lu Qin,Li Detang,Li Date,et al.Design of Energy Harvesting Efficiency of‘Haiyuan 1’Wave Power Generating Platform’s Buoy TestingSystemBased on LabVIEW[J].Journal ofShip Mechanics,2015,19(3):264-272.
[32]徐超,石晶鑫,李德堂.自升式波浪能發(fā)電裝置設(shè)計與試驗研究[J].船舶,2015,151(1):79-84.
[33]吳必軍,游亞戈,馬玉久.波浪能獨立穩(wěn)定發(fā)電自動控制系統(tǒng)[J].電力系統(tǒng)自動化,2007,31(12):75-79.
Research Status and Prospect of Point Absorber Wave Power Generation Technology
YANG Shao-hui1,2,3,HE Hong-zhou1,2,3,LI Hui1,2,3,ZHANG Jun1,2,3
1.College of Mechanical and Energy Engineering,Jimei University,Xiamen 361021,F(xiàn)ujian Province,China;
2.Key Laboratory of Clean Energy Utilization and Development of Fujian Province,Xiamen 361021,F(xiàn)ujian Province,China;
3.Fujian Engineering Technology Research Center of Clean Burning and Efficient Use of Energy,Xiamen 361021,F(xiàn)ujian Province,China
After analyzing the context of wave energy utilization,this paper puts forward that the point absorber wave power generation technology is an efficient way to tap wave energy and the most important research direction.The wave energy converter devices are classified in terms of installing location,energy transferring mode and the number of oscillating floaters.Combined with the research status,the advantages and disadvantages of all kinds of point absorber wave energy capturing,converting and transferring methods have been analyzed and compared in a comprehensive way.The results show that point absorber wave energy converters installed 10 to 25 m away from coast,wave energy intake equipment composed of array buoys and the energy transferring mode using hydraulic or direct drive generator are research focuses and have wide prospect in the field of wave power utilization.
wave energy;point absorber;hydraulic transform;oscillating floater;direct drive;array type;research status
TM619;TM743
A
1003-2029(2016)03-0008-09
10.3969/j.issn.1003-2029.2016.03.002
2015-11-15
國家自然科學(xué)基金資助項目(51209104,51409118);福建省自然科學(xué)基金資助項目(2016J01247);福建省教育廳杰青資助項目(JA13170);集美大學(xué)黃慧貞基金資助項目(ZC2011017)
楊紹輝(1979-),男,博士,副教授,主要研究方向為可再生能源利用與開發(fā)、節(jié)能技術(shù)研究、智能化監(jiān)測與控制。E-mail:13163996278@163.com