基于GNSS浮標的潮位測量技術研究
2016-10-25 08:47:21翟萬林朱建華陳春濤閆龍浩
海洋技術學報 2016年3期
關鍵詞:測量
翟萬林,朱建華,陳春濤,閆龍浩
(國家海洋技術中心,天津300112)
基于GNSS浮標的潮位測量技術研究
翟萬林,朱建華,陳春濤,閆龍浩
(國家海洋技術中心,天津300112)
利用研制的GNSS浮標,在海南省清瀾灣進行了21.5 h的潮位測量工作,分別使用GAMIT+TRACK和精密單點定位技術(PPP)兩種方法對GNSS數據進行解算,并對高頻GNSS解算結果進行了巴特沃斯、低通濾波、中值濾波、小波濾波等處理,處理結果與實測潮位數據進行了對比。結果表明:(1)使用GNSS浮標可以進行潮位測量;(2)移動平均濾波或中值濾波對高頻GNSS浮標解算數據的處理結果較好,其次為巴特沃斯濾波,小波濾波處理結果較差;(3)在GNSS基準站的支持下,GAMIT+TRACK對GNSS解算結果精度可達1.065 cm,并可以給出絕對高程下的潮位信息;PPP技術解算結果的精度為4.283 cm,但不需要GNSS基準站的支持,可用于遠海潮位測量。
GAMIT/GLOBK;TRACK;精密單點定位;驗潮;GNSS浮標;濾波
潮位變化是水體在天體引潮力的作用下發生的垂直漲落,以及風、氣壓、大陸徑流等因子所引起的非周期性變化。目前沿海的潮位測量以驗潮站為主,但隨著全球導航衛星系統(Global Navigation Satellite System,GNSS)和衛星高度計(satellite altimeter)的迅速發展,潮位測量的方式越來越趨向于多樣化。利用GNSS進行潮位測量的技術也經過了多次試驗[1-3],均得到了較好的效果,但使用GNSS浮標的潮位測量技術研究還較少。
近10多年來,GNSS浮標主要應用于衛星高度計海面絕對高程的定標檢驗任務[4-5],且已達到了相當高的精度。但我國目前的高度計定標檢驗工作開展較為緩慢,研制的GNSS浮標還處于測試階段[6]。本文利用在海南省清瀾灣的GNSS浮標測試試驗,分別使用GAMIT+TRACK和PPP兩種方法對浮標數據進行解算,并使用4種濾波算法對解算結果進行了濾波處理,使用驗潮站實測數據對解算結果進行了分析,得到了較好的效果。
1 試驗方法
1.1試驗概況
本次試驗在海南省文昌市清瀾海洋環境監測站進行,在清瀾海洋環境監測站內設立了GNSS基準站(見圖1,Trimble GNSS扼流圈天線,Trimble Pro XRT主機),在驗潮站附近設立了GNSS浮標(見圖2,Trimble GNSS扼流圈天線,Trimble NET R9主機),GNSS基準站與浮標直線距離約為371 m,GNSS浮標與驗潮儀的距離約為20 m。基準站、GNSS浮標和驗潮站的位置及觀測時間段見表1。
GNSS基準站和驗潮儀的觀測時間為2014年8月4日-6日;GNSS浮標的觀測時間為2014年8月4日6:40-8月5日4:10,總計21.5 h。

圖1 GNSS基準站

圖2 GNSS浮標
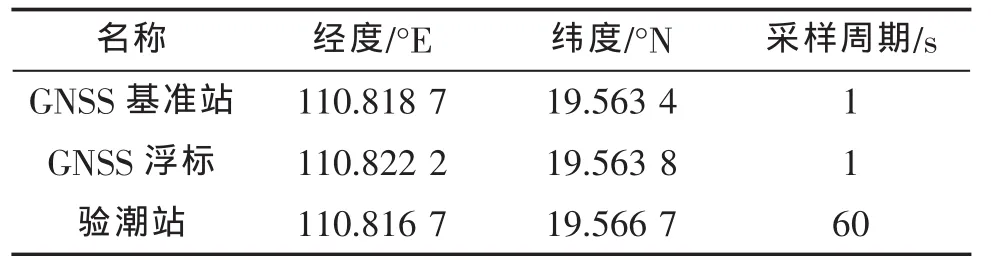
表1 GNSS基準站、浮標和驗潮站坐標
1.2GPS浮標數據處理方法
1.2.1GAMIT+TRACK為了保證GNSS基準站的高程解算精度,對GAMIT軟件在運算過程中的主要配置加以說明[7-8]:在原始數據中提取30 s周期的GNSS測量值,與IGS站的數據采樣周期保持一致;GAMIT處理模式為松弛解(RELAX.)并使用GLOBK進行平差;衛星截止高度角為10°;潮汐模型選擇otl_FES2004.grid;大氣參數模型選擇為vmf1grd.2014;參考框架選擇為ITRF2008。選擇了GNSS周邊的AIRA,CCJ2,CHAN,CHUM,CNMR,CUSV,DAEJ,HYDE,IISC,IRKM,LHAZ,MAG0,MCIL,MIZU,NRIL,NVSK,PBRI,PETS,PIMO,STK2,TWTF,ULAB,URUM,USUD,YAKT,YSSK等26個IGS站和精密星歷數據對基準站數據進行了處理,并使用GLOBK軟件進行網平差處理。TRACK解算采用短基線模式進行解算。
1.2.2精密單點定位技術(PPP)精密單點定位(Precise Point Positioning,PPP)技術由美國噴氣推進實驗室(JPL)的Zumberge于1997年提出[9],目前已廣泛應用于科研和實踐。本次解算使用的軟件為CSRS-PPP[10-11],該軟件是加拿大國有資源局大地測量司提供的GPS在線單點定位服務,它只需要用戶提交靜態或動態觀測數據文件,就可進行高精度定位,不依賴于IGS站的數據質量。本文中使用精密星歷和30 s鐘差數據,大氣模型為GPT,未進行潮汐改正。最終生成ITRF(IGb08)參考框架下的坐標,并使用文獻 [12]中的方法,將高程坐標值轉化為WGS-84橢球下的坐標。
2 試驗結果與分析
2.1基準站數據處理
基準站數據處理分為GAMIT基線處理和GLOBK卡爾曼濾波進行網平差處理。GAMIT最終解算的NRMS為0.205,說明解算合理[7]。基線處理結果見表2,平均基線長度達到了3 654 m,基線解算的精度可以達到1 cm以內。使用GLOBK平差后,GNSS基準站的精度為11.49 mm。
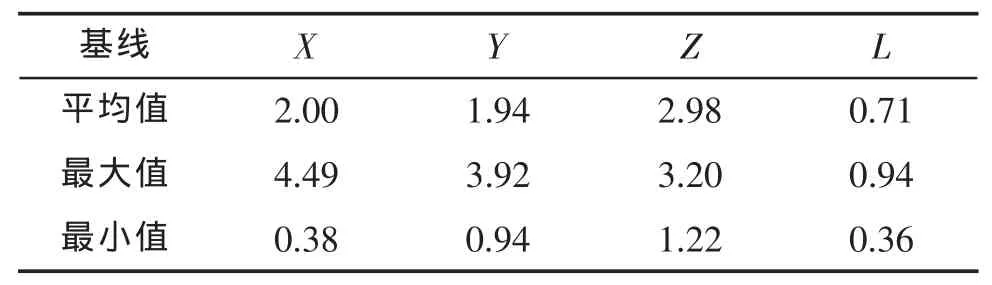
表2 基準站基線處理偏差(單位:cm)
2.2GNSS浮標結果與驗潮儀的對比
GNSS浮標數據處理包括了TRACK處理和PPP處理。其中TRACK數據處理是以基站為基準的動態解算,PPP處理為CSRS軟件的處理結果。以TRACK解算結果的高程值為基準,將驗潮儀測量的潮位值歸算到WGS-84橢球(與PPP結果一致)。最終與得到的3個結果進行了對比(圖3)。
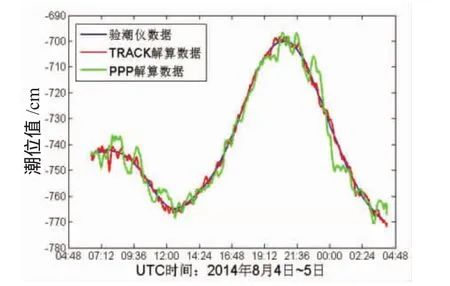
圖3 數據解算結果的對比
驗潮儀作為傳統的驗潮方法,其精度得到了廣泛的認可。因此本次試驗以驗潮儀的數據解算結果為基準。GPS浮標測量的潮位曲線與驗潮站的曲線總體上一致(圖3),實際上與理論曲線相比存在一定的偏差,經統計分析后得到了TRACK解算的精度為1.47 cm;PPP解算的精度為4.46 cm,可用于遠距離范圍內的增水測量。與傳統驗潮儀相比,GAMIT+TRACK解算結果中 99.7%置信區間為±6.01cm,PPP解算結果99.7%置信區間為±13.38cm。
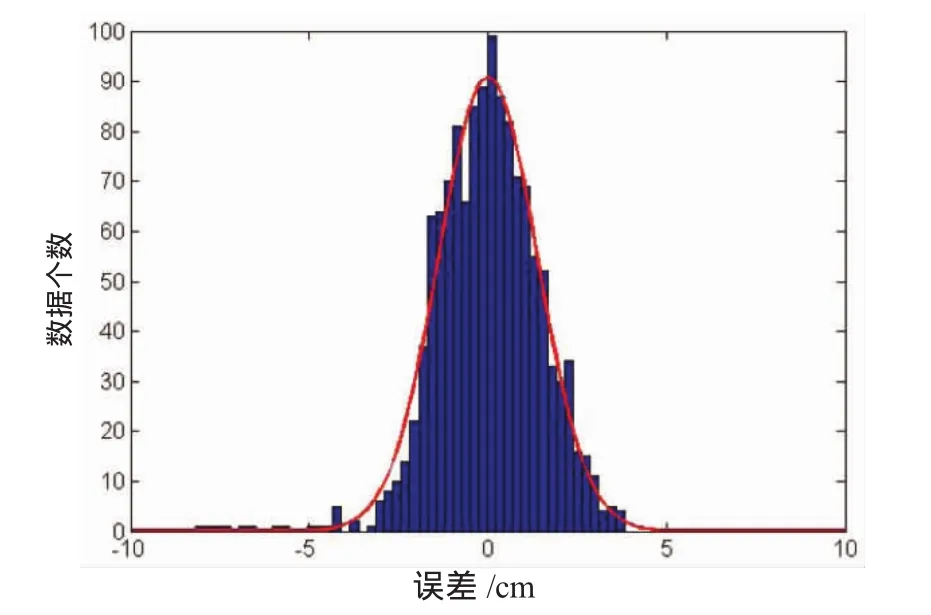
圖4 TRACK解算結果與驗潮儀數據對比誤差
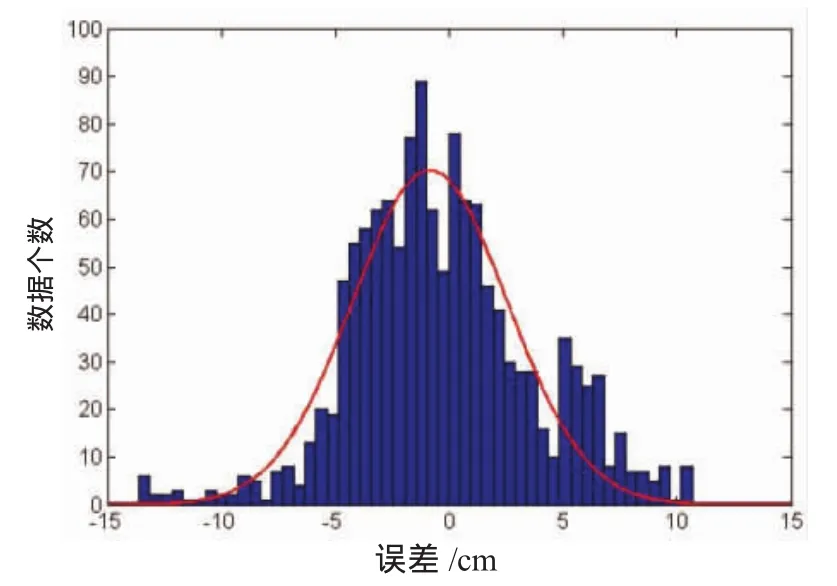
圖5 PPP解算結果與驗潮儀數據對比誤差
但是對于GNSS浮標的解算結果為動態解算,受到海浪譜等外界條件的干擾和噪聲的影響,其精度不能完全滿足驗潮需求[13]。因此需要對數據進行濾波處理,本文分別使用了巴特沃斯低通濾波[14]、移動平均濾波、中值濾波、小波濾波等方法對GNSS浮標數據進行了再處理,對2 min之內的測量數據進行濾波,可以有效地去除波浪對測高精度的影響[4]。最終得到的結果與驗潮儀測量結果進行了對比(表3)。
對比結果顯示,使用濾波算法處理后的數據均有一定程度的改善。根據平均差和標準偏差的比較,使用巴特沃斯濾波處理后的結果最好,TRACK解算的標準偏差由1.469 cm提高到了1.065 cm,PPP解算的結果也由4.462 cm提高到了4.283 cm;移動平均濾波與中值濾波的效果相當;小波濾波后對數據改善的效果較差。從相關性角度來看,巴特沃斯濾波后數據失真較為明顯,而移動平均濾波、中值濾波和小波濾波與原始數據的相關性都較好。PPP處理結果的標準偏差改善較少,主要受到該技術測高精度的影響[3],不適宜近岸潮位測量工作。綜合上述分析,在GNSS浮標數據處理過程中,使用移動平均濾波或中值濾波既可以改善數據質量,又可以保證數據的真實可信。
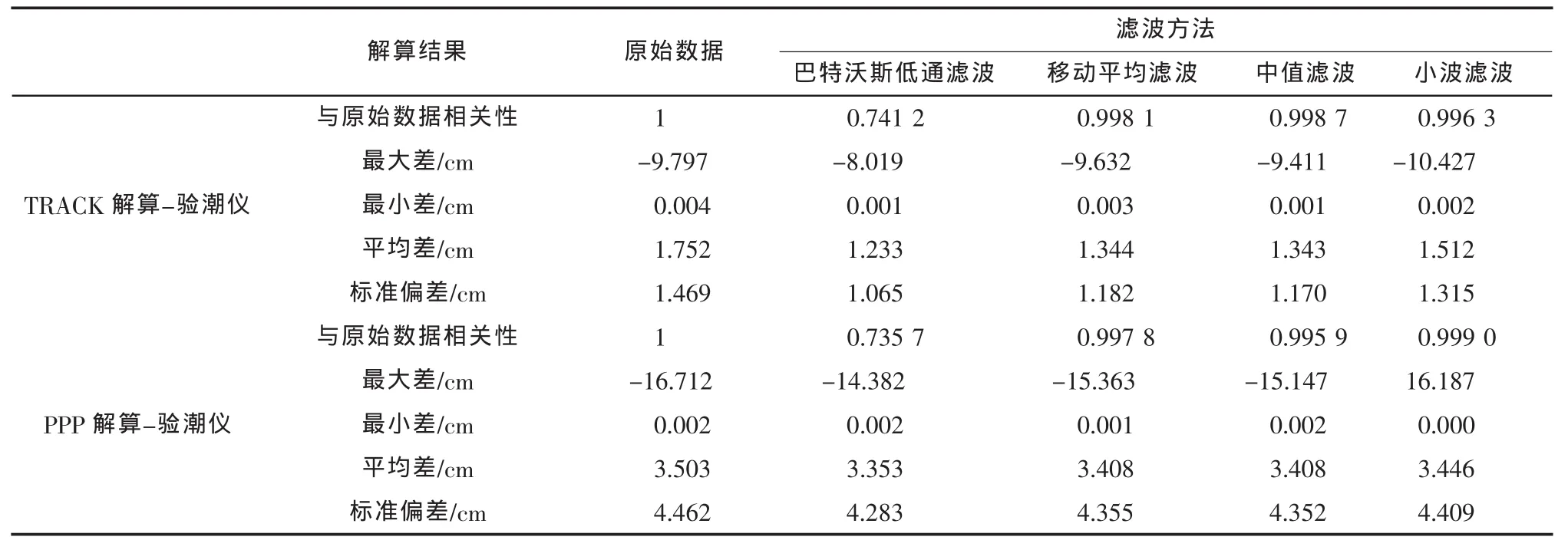
表3 四種濾波算法結果對比
3 總結與討論
使用研制的GNSS浮標可以完成潮位測量工作,但受到噪聲和海浪的影響,使用GAMIT+ TRACK和PPP解算的高程定位結果需要進行濾波處理,通過對比四種濾波算法,確定了使用移動平均濾波或中值濾波可以達到較好的效果,使GNSS浮標測高精度達到1 cm左右。
GNSS浮標的海面高程測量精度滿足《海洋調查規范——第十部分:海底地形地貌調查》的需求(要求水位觀測精度優于5 cm,時間準確度優于1 min),較之于驗潮儀,該方法可以布設在離岸30 km以內的幾乎所有海域,使水位觀測點的選擇更具靈活性。由于GNSS浮標的測高精度較高,且布放不受海陸條件的限制,也應用于海洋衛星高度計的定標檢驗工作中[4]。但是受到精密星歷和鐘差發布滯后的影響,GNSS浮標的解算結果要比測量結果延后12~14 d。使用PPP對GNSS浮標進行解算的精度可以達到4.35 cm,可以不受基準站的限制,可完成中遠海距離的潮位測量工作。
致謝:感謝清瀾海洋環境監測站站長陳雁揚在潮位數據獲取、GNSS基準站和浮標布放方面給予的支持。
[1]汪連賀.基于GPSPPK技術的遠距離高精度驗潮方法研究[J].海洋測繪,2014,34(4):24-27.
[2]F Fund,F Perosanz,LTestut,et al.An Interger Precise Point PositioningTechnique for Sea Surface Observations Usinga GPS bouy[J].Advances in Space Research,2013(51):1311-1322.
[3]趙建虎,王勝平,張紅梅,等.基于GPSPPK/PPP的長距離潮位測量[J].武漢大學學報:信息科學版,2008,33(9):910-913.
[4]Watson,Richard Coleman,Neil White,et al.Absolute Calibration of T/P and Jason-1 Using GPS Buoys in Bass Strait,Australia[J].Marine Geodesy,2003,26:285-304.
[5]翟萬林,陳春濤,閆龍浩.基于GPS浮標的高度計海面高度產品檢驗技術進展[J].海洋測繪,2012,32(6):40-43.
[6]陳春濤,翟萬林,張倩,等.基于GNSS測高浮標的設計、研制與測試[J].海洋技術學報,2014,33(1):102-108.
[7]T A Herring,R W King,S C McClusky.GAMIT Reference Manual Release 10.4[M/OL].http://chandler.mit.edu/~simon/gtgk/Intro-GG-10.4.oaf,2010.
[8]翟萬林,朱建華,陳春濤,等.IGS基準站的選擇對GPS定位精度的影響[J].海洋測繪,2014,34(4):17-19.
[9]Zumberge J F,Heflin MB,Jefferson D C,et al.Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks[J].Journal ofGeophysical Research,1997,102:5005-5017.
[10]Yves M,Pierre T,Francois L,et a1.Online Precise Point Positioning[J].GPSWorld,2008(9):59-64.
[11]金蕾,胡友健,梁新美.GPS在線數據處理軟件的精度分析[J].地理空間信息,2007,5(2):85-87.
[12]金濤勇,李建成,邢樂林,等.多源衛星測高數據基準的統一研究[J].大地測量與地球動力學,2008,28(3):92-96.
[13]孫罡,王昌明,張愛軍.GPS靜態單點定位的濾波算法比較[J].南京理工大學學報:自然科學版,2011,35(1):80-85.
[14]黃同,王海軍,樊延虎,等.基于MATLAB的巴特沃斯數字濾波器設計[J].延安大學學報:自然科學版,2008,27(3):63-64.
Research on the Tidal Observing Technique Based on GNSS Buoy
ZHAI Wan-lin,ZHU Jian-hua,CHEN Chun-tao,YAN Long-hao
National Ocean Technology Center,Tianjin 300112,China
The continuous tidal observation which lasted for 21.5 h was done at the Qinglan Bay in Hainan Province using the GNSS buoy.The GNSS buoy data were calculated respectively using GAMIT+TRACK method and the technique of precise point positioning(PPP).Four different filter methods,including Butter Worth filtering,low-pass filtering,median filtering and wavelet filtering,were used to process the GNSS buoy results obtained through the above two techniques.Then the final results were compared with the tidal data acquired from the tidal station.The results show that:(1)the GNSS buoy can be used for tidal observation;(2)by comparing the four methods for filtering,moving average filtering and median filtering are the best methods for high-frequency GNSS buoy data processing,followed by the Butter Worth filtering solution,and the wavelet filtering leads to unsatisfactory results;(3)under the support of the GNSS reference station,the precision of the GAMIT+TRACK method on GNSS calculating results can reach 1.065 cm,and it could provide the absolute height of tide;the precision of the PPP technique is 4.283 cm,but this method doesn't require GNSS reference station support,thus suitable for open sea tidal observation.
GAMIT/GLOBK;TRACK;Precise Point Positioning;tidal observation;GNSS buoy;filter
P714
A
1003-2029(2016)03-0028-04
10.3969/j.issn.1003-2029.2016.03.005
2015-04-02
國家自然科學基金資助項目(41406204);海洋公益性行業科研專項資助項目(201305032-3)
翟萬林(1985-),男,碩士,工程師,主要研究方向為衛星高度計定標檢驗與海洋測繪技術。E-mail:zwl13032@163.com
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00