用GPS觀測資料解算地球自轉參數的方法及影響因素分析
2016-10-27 08:39:07王新靜袁運斌潭冰峰
大地測量與地球動力學 2016年10期
關鍵詞:質量
王新靜 袁運斌 潭冰峰 宋 敏 劉 騰
1 中國科學院測量與地球物理研究所大地測量與地球動力學國家重點實驗室,武漢市徐東大街340號,430077 2 中國科學院大學,北京市玉泉路甲19號,100049
?
用GPS觀測資料解算地球自轉參數的方法及影響因素分析
王新靜1,2袁運斌1潭冰峰1,2宋敏1劉騰1,2
1中國科學院測量與地球物理研究所大地測量與地球動力學國家重點實驗室,武漢市徐東大街340號,430077 2中國科學院大學,北京市玉泉路甲19號,100049
研究利用GPS觀測資料解算ERP參數的方法。首先,利用全球近100個均勻分布、站址穩定的IGS測站的GPS觀測數據解算地球自轉參數,并將其與IGS相應產品進行比較,結果顯示該解算方案可靠。其次,從實驗數據和數理表示方面分析ERP參數解算過程中的軌道約束方案、先驗ERP信息、站坐標數量對解算精度的影響,給出一些提高ERP參數解算精度的建議:對ECOM光壓模型9參數中徑、法向(D、Y)4個周期項采取相對寬松約束、隨機脈沖參數采取緊約束,解算效果更佳;降低ERP先驗信息對解算精度的影響,重點在于提高UT1-UTC的預報值精度;利用100個跟蹤站數據解算,可達到解算效率和解算質量均最佳的效果。
地球自轉參數(ERP);極移;日長變化;影響因素;解算質量
地球自轉參數(earth rotation parameters,ERP)包括反映自轉軸相對于地殼運動的極移變化參數X-P、Y-P,反映地球自轉角不規則特征的UT1-UTC,以及反映地球自轉速率變化的日長變化參數LOD[1]。隨著現代空間導航和深空探測等技術的發展,對高精度地球自轉參數的預報和監測的需求日益增長。
高精度測定地球旋轉的技術包括甚長基線測量(VLBI)、激光衛星測距(SLR)、激光測月(LLR)、全球導航衛星系統(GNSS)等[2]。VLBI、SLR等技術觀測精度高,但其設備龐大昂貴,觀測數據量少,不能流動,因此難以普及。隨著IGS跟蹤站的增加,觀測質量和處理技術不斷提高,GNSS觀測資料已經成功地應用于ERP參數解算。然而,由于衛星系統間存在系統差,目前多系統聯合解算并沒有顯著提高ERP的解算精度[3-4]。GPS作為首個完善且穩定的衛星系統,一直被應用于解算ERP。1995年起,IERS(International Earth Rotation Service)正式采用GPS及幾種大地測量技術聯合求解EOP[5-6],IGS各分析中心也將ERP產品作為一項核心產品實時發布給用戶使用。隨著目前全球連續監測評估系統(iGMAS)的建立,以及GPS軌道產品精度的提高、ERP預報技術的進步、全球IGS站點的增加,對ERP參數解算也提出了更高的精度要求。目前,學者們對ERP參數解算的研究主要集中于解算原理及解算策略的探討[7],聯合解算的精度分析與比較[8],高頻解算中解算結果的數據處理及頻譜特征提取[3,9],以及日長變化的季節性和年際變化分析方面[1],而對解算過程中的影響因素分析,尤其是ERP解算與軌道參數的相關性及先驗信息的選取方面略有不足。為此,在GPS參數解算ERP過程中,本文從如何適當約束軌道,選擇合適的先驗信息和站點以提高ERP參數解算質量進行了重點討論。
1 利用GPS資料解算ERP參數及可靠性分析
參考Bernese軟件及中科院測量與地球物理研究所分析中心(IGGAC)自主研發的ERP解算方法,設計了一套完善的ERP估算流程(圖1)。為確保軌道弧段的連續性和足夠的數據量,在解算過程中采取與IGS快速產品解算一致的3 d法方程疊加形式的解算模式,目的是將每個在單天子弧段中用多項式形式解算的ERP參數,在長弧段疊加時利用線性分段函數進行計算,增加解算的精度和可靠性。
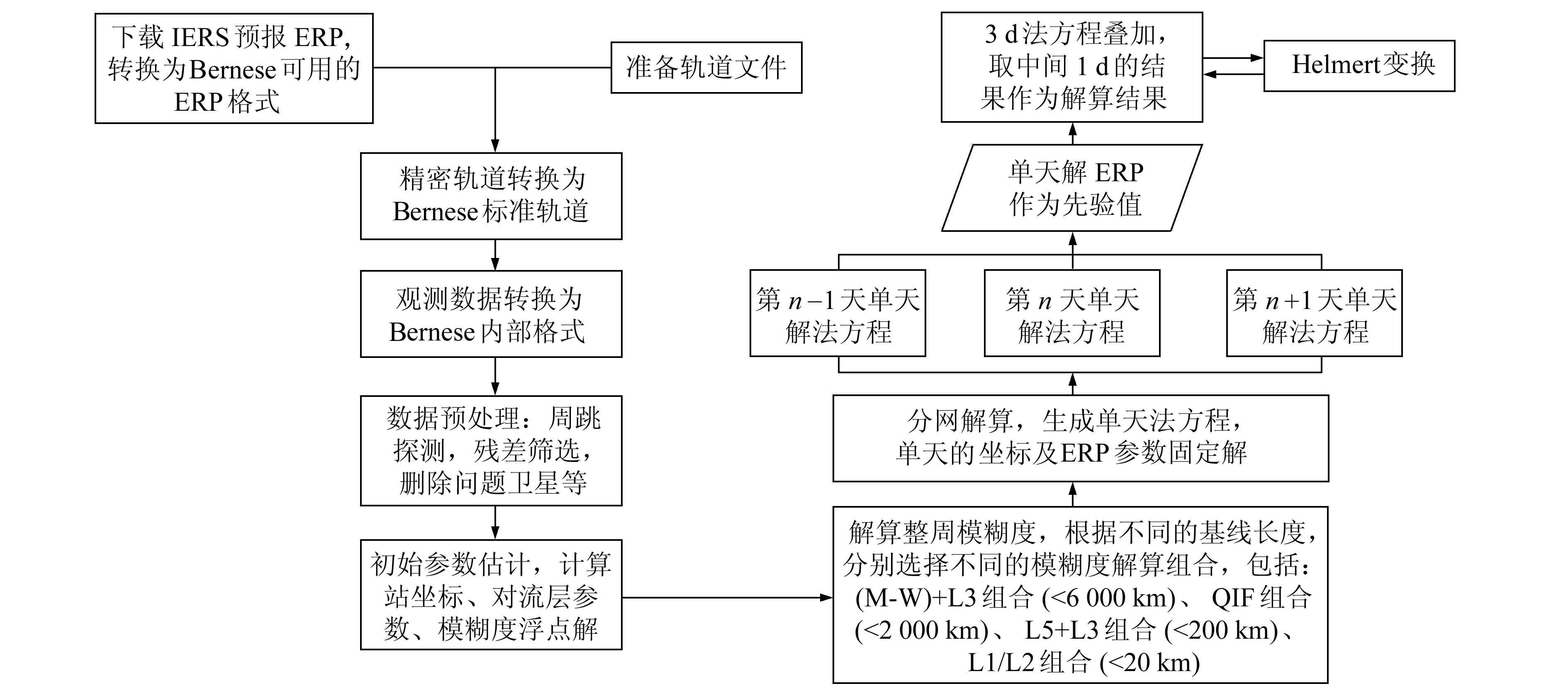
圖1 GPS資料解算ERP參數的解算流程Fig.1 The ERP processing by GPS data
基于上述流程,解算了2014-04-14~2014-06-14期間的ERP參數。計算中,采用IERS發布的預報ERP序列作為先驗值(ftp://ftp.iers.org/products/eop/rapid/ daily)。綜合考慮計算效率和解算精度,在全球范圍內選取分布均勻、跟蹤網幾何結構良好、站址穩定、觀測數據質量較高的約100個IGS跟蹤站數據,進行ERP參數的解算。
為評定本文ERP參數值的解算精度,將3 d法方程疊加解算所得的極移及LOD分量值分別與IGS最終產品同時刻(UTC 12:00)ERP解算值作比較,統計兩者的RMS結果,如圖2所示。

圖2 本文解算結果與IGS最終產品對應值差值RMS的比較Fig.2 Difference between this paper solution and IGS final solution
由圖2可見:1)本文解算的X-P、Y-P與IGS給出的最終產品同時刻對應參數差值的RMS分別為0.047 mas和0.039 mas,95%以上分布在-0.1~0.1 mas范圍內。2)LOD差值的RMS為0.022 ms,95%以上分布在-0.05~0.05 ms范圍內。
通過與IGS最終產品同時刻解算值差值的RMS結果比較表明,本文解算方法可靠,精度基本能滿足應用需求。
2 用GPS觀測資料解算ERP參數的影響因素分析
由于ERP參數解算精度受多種因素影響,基于§1的研究工作,下面主要從軌道約束方案、先驗ERP信息、站點選擇幾個方面進一步分析各因素對解算質量的影響。
2.1軌道約束方案對ERP解算精度影響分析
其他條件相同的情況下,在GPS解算ERP的過程中僅將某類軌道約束條件作為單一變量,對其作松約束到緊約束的改變,將ERP參數解算值與IGS最終產品解算結果進行比較,差值量的RMS值變化統計見表1。
分別增強Ω、i、u0,徑、法向周期項,隨機脈沖參數的約束強度,表1中2、3、4列為隨約束強度的變化,在某一約束臨界值上ERP參數解算精度的變化。
表1第一行結果顯示,隨著Ω、i、u0約束強度的增強,極移參數變化不顯著,其解算值與IGS最終產品對應值的差值RMS變化在±0.005 mas范圍內,而LOD參數在約束強度增加至約束臨界值(達到10-4m及以上)時,解算質量顯著下降,RMS增長0.015 ms(由0.042 ms上升至0.057 ms)。
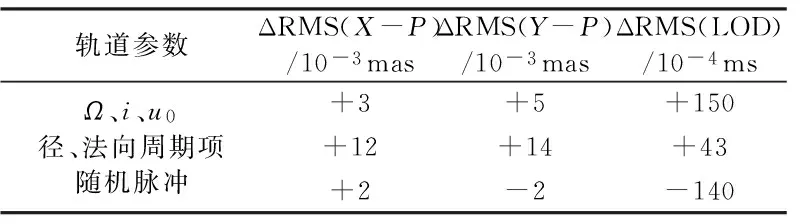
表1 不同約束下ERP解算值與IGS最終產品差值的RMS統計
注:Ω為升交點赤徑,i為軌道傾角,u0為升交角距。
表1第二行結果顯示,對ECOM光壓模型9參數中徑、法向(D、Y)4個周期項采取緊約束(10-12及以上)時,整體解算質量下降,尤其LOD解算精度下降顯著(X-P、Y-P與IGS最終產品差值量的RMS增長0.012 mas和0.014 mas,LOD增長0.004 3 ms)。
第三行結果顯示,當隨機脈沖參數約束強度增強至臨界值時(徑向、切向、法向分別增長到10-6、10-5、10-9),雖極移參數變化不大,但LOD的解算質量顯著提高,LOD與IGS最終產品差值量的RMS減少0.014 ms。
Rothacher M等[9]提到,不考慮攝動力的情況下,衛星位置在地固系下的坐標可以表示為:
(1)
式中,Ra(α)為旋轉矩陣,Θ為格林尼治真恒星時,Δε、Δφ為交角和黃經章動,u0為參考時刻衛星升交角距,r為衛星到地心的距離。經推導,無跳秒發生時,日長變化(LOD)即為(UT1-UTC)的變化率,即

(2)
式中,ρ為常數,可根據IERS公告查詢[10]。
可見,LOD與Ω、i、u0之間存在直接的數學關系,Ω、i、u0的變化必然會引起LOD值的變化,這在上述實驗中也得到了證實。
此外,LOD參數和軌道參數間存在強相關性,而衛星繞地運動受力情況復雜,定軌中無法將衛星受到的所有攝動力精準地模型化,無法模擬的力模型誤差必然會對LOD的解算質量造成影響。上述實驗證實,光壓模型的D、Y周期項和偽隨機脈沖的變化會導致LOD解算值的變化。因此,采用精確的軌道解算方案是提高LOD參數解算質量的前提。
從上述結果分析中發現,不同軌道約束方案主要影響ERP參數解算中LOD的解算質量。表1結果顯示,僅隨機脈沖參數緊約束,而Ω、i、u0及ECOM光壓模型9參數中徑、法向(D、Y)4個周期項施加相對寬松約束時,利用GPS解算ERP的效果更佳,這與CODEIGS分析中心策略文件中[11]采用的對ECOM光壓模型9參數中徑、法向(D、Y)4個周期項采取緊約束的解算策略略有差異。
2.2ERP先驗信息對ERP參數解算影響分析
在其他條件相同的情況下,將ERP預報信息作為單一變量,采取不同精度的ERP作為先驗信息進行實驗,將解算結果與IGS最終產品同時刻的值進行比較,兩種結果差值量的RMS統計如表2。
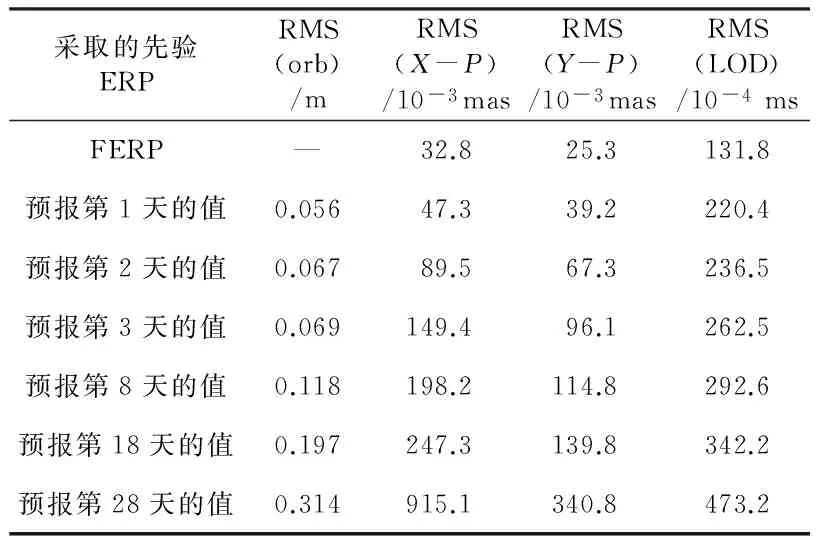
表2 不同先驗ERP條件下ERP解算值與
首先,為比較ERP對框架轉換精度的影響,用不同外推時間的預報ERP對軌道位置信息進行天球系到地固系的轉換,并與利用IGS最終產品ERP轉換所得的軌道位置作比較,所得差值的RMS統計結果見表2第1列(RMS(orb))。結果顯示,采用預報第1天的結果計算所得的RMS差值即有5.6 cm,到第28天已達到31.4 cm。這在高精度定軌定位解算中對結果的影響是不可忽略的。
RMS(X-P)、RMS(Y-P)、RMS(LOD)分別為采用不同外推預報時間ERP作為先驗信息,解算所得的ERP各分量值與IGS最終產品對應分量差值的RMS。RMS(X-P)、RMS(Y-P)、RMS(LOD)分別由0.032 8 mas、0.025 3 mas、0.013 1 ms下降至0.915 1 mas、0.341 mas、0.047 3 ms。由實驗結果可見,解算精度與先驗信息存在較強的關聯性。隨著預報序列精度的降低,軌道參數框架轉換精度降低,ERP各分量解算精度也明顯降低。
統計2014-04-14~2014-05-14期間的ERP預報值與IGS最終產品ERP經拉格朗日插值得到的同歷元解算值間的偏差,結果如圖3。

圖3 ERP預報誤差統計Fig.3 Statics of ERP prediction error
圖3結果顯示,隨著ERP參數預報外推時間間隔的增長,預報序列整體精度下降過程中,極移呈波動趨勢下降,而UT1-UTC精度呈量級趨勢下降。據式(1),由Δε、Δφ、UT1-UTC(Θ與UT1-UTC直接相關)偏差引起的旋轉可以被Ω、i、u0引起的旋轉所吸收,兩者之間存在耦合,采用GPS技術不能直接估計UT1-UTC值。本文在利用GPS觀測資料解算ERP的過程中,UT1-UTC的預報精度有限且難以改善,在很大程度上影響了解算精度的提高。綜上所述,隨著預報序列外推間隔的增長,解算質量明顯下降。因此,在GPS解算ERP參數技術中,提高UT1-UTC值的預報精度是關鍵。
2.3站點選擇對ERP參數解算的影響分析
在其他條件相同的情況下,選取不同數量的站點進行ERP參數解算,將解算結果與IGS最終產品對應結果進行比較,差值量的RMS值統計如圖4所示。
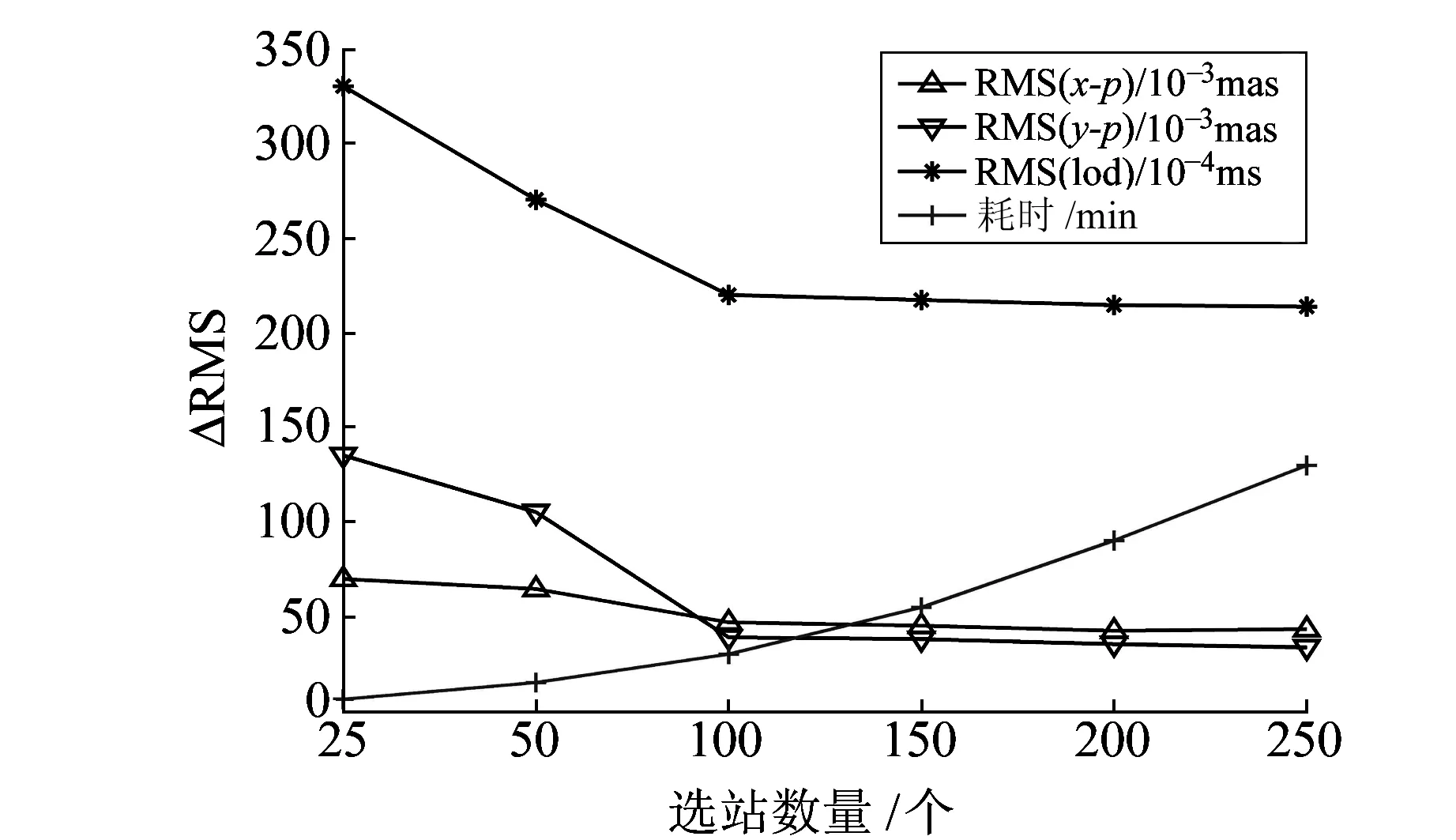
圖4 不同站點數量時ERP解算值與IGS最終產品差值的RMSFig.4 Statics of RMS between the solution under different station and IGS final solution
站址穩定、站點分布均勻是保證解算質量的前提。本實驗所選站點形成的基線長度平均值約為1 800 km,且70%以上分布于1 300~2 300 km范圍內。關于選站數量,圖4結果顯示,當站點數量小于100時,隨著選站數量的增加,解算質量顯著提高,X-P、Y-P、LOD解算值與IGS相應值的差值RMS下降0.023 mas、0.096 mas、0.019 ms;而隨著站點數量繼續增加,解算質量趨于穩定,但解算耗時顯著增加,100個站的解算耗時30 min,而250個站的解算耗時則增長到130 min,解算效率明顯降低。
在GNSS數據處理選站過程中,除確保站點的均勻分布、站址穩定外,還應合理確定選站數量,以確保解算效率和解算質量。本文實驗分析結果顯示,選取100個均勻、穩定的站點較為合理,這也與IGS解算策略中采用的80~100個站點的解算方式相符[11]。
3 結 語
利用全球約100個IGS跟蹤站的GPS觀測數據進行ERP參數的解算,與IGS最終產品對應值的比較表明,X-P、Y-P差值的RMS為0.047 mas和0.039 mas,LOD差值的RMS為0.022 ms,精度高于或達到同類研究水平[3,7]。
本文研究結果表明,Ω、i、u0及ECOM光壓模型9參數中徑、法向(D、Y)4個周期項采取相對寬松約束、隨機脈沖參數采取緊約束的方式較為合理, 這與CODE IGS分析中心策略文件中采取緊約束的解算策略略有差異。精確的先驗ERP信息是高精度ERP參數解算的先決條件,由于采用GPS解算ERP的技術不能解算UT1-UTC的值,而預報序列UT1-UTC的精度下降顯著,因此,提高UT1-UTC預報值的精度是關鍵。對于選站數量,當站點數量過少時無法保證解算精度,而數量過多時對解算效率影響顯著。本文實驗結果表明,100個跟蹤站可實現解算效率和解算質量均最佳的效果。在站點分布方面,本文選取了全球范圍內均勻分布的站點,而未對站點的幾何分布作更加深入的研究。此外,解算過程中解算策略和各種誤差修正模型的選取也會對ERP參數的解算質量造成影響,筆者計劃在后續工作中作進一步相關研究。
[1]郭金運,韓延本.由SLR觀測的日長和極移季節性和年際變化(1993~2006年)[J].科學通報,2008, 53 (21):2 562-2 568(Guo Jinyun,Han Yanben. The Observation of Seasonal and Interannual Variation for LOD and PM by SLR (1993-2006)[J].Chinese Science Bulletin,2008, 53 (21):2 562-2 568)
[2]徐天河,楊元喜.VLBI、SLR、GPS綜合數據處理方案研究[J].測繪工程,2002,11(4):7-11(Xu Tianhe,Yang Yuanxi. The Research on the Schemes of Combination Adjustment of VLBI、SLR and GPS Data[J].Engineering of Surveying and Mapping, 2002,11(4):7-11)
[3]魏二虎,李廣南,暢柳,等.利用GPS觀測數據研究高頻地球自轉參數[J].武漢大學學報:信息科學版,2013,38(7):818-821(Wei Erhu,Li Guangnan,Chang Liu, et al.On the High-Frequency ERPs with GPS Observations[J]. Geomatics and Information Science of Wuhan University,2013,38(7):818-821)
[4]王琪潔,廖德春,周永宏.地球自轉速率變化的實時快速預報[J].科學通報,2007,52(15):1 728-1 731(Wang Qijie,Liao Dechun,Zhou Yonghong.Rapid Prediction of the Velocity Changing of Earth Rotation[J].Chinese Science Bulletin,2007,52(15):1 728-1 731)
[5]Fritsche M,Carlos R G,Peteret S,et al.Joint Reprocessing of GPS,GLONASS and SLR Observation Vations First Results[C]. IGS Workshop, Poland, 2012
[6]Schaer S,Meindl M B,Thaller D. Geocenter Coordinates and Subdaily Polar Motion Estimated from a Multi-GNSS Data Analysis[C]. IGS Workshop, Poland, 2012
[7]何占科,楊旭海.利用GPS觀測資料解算地球自轉參數[J].時間頻率學報,2010,22(1):69-76(He Zhanke, Yang Xuhai.Estimation of Earth Rotation Parameters Based on GPS Observation[J]. Journal of Practical Frequency, 2010, 22(1): 69-76)
[8]魏二虎,萬麗華,金雙根,等.聯合GNSS和SLR觀測對地球自轉參數的解算與分析[J].武漢大學學報:信息科學版, 2014,39(5):581-585(Wei Erhu,Wan Lihua,Jin Shuanggen,et al. Estimation of ERP with Combined Observations of GNSS and SLR [J]. Geomatics and Information Science of Wuhan University,2014,39(5):581-585)
[9]Rothacher M,Beutler G. Estimation of Nutation Using the Global Positioning System[J]. Geophysics, 1999,104(B3):4 835-4 859
[10]Mccarthy D D,Petit G.IERS Conventions[R]. IERS Technical Note [M].1996
[11]Hefty J,Rothacher M. Analysis of the First Year of Earth Rotation Parameters with a Sub-Daily Resolution Gained at the CODE Processing Center of the IGS[J].Journal of Geodesy,2000,74:479-487
Estimation of the ERPs Based on GPS Data and the Analysis of the Impact Factor
WANGXinjing1,2YUANYunbin1TANBingfeng1,2SONGMin1LIUTeng1,2
1State Key Laboratory of Geodesy and Earth’s Dynamics, Institute of Geodesy and Geophysics, CAS,340 Xudong Street, Wuhan 430077, China 2University of Chinese Academy of Sciences, A19 Yuquan Road,Beijing 100049, China
ERP is a necessary parameter in the transformation between the ITRF and ICRS. The paper introduces a method of solving the ERP parameters based on GPS data. First, about 100 global uniform and stable distributed IGS stations are selected for the calculation of the solution, and then we make comparisons between the solution sequence from the experiment and the IGS final-solution sequence. Second, we analyze the impact factor of the solution quality from the aspect of experimental data and mathematical derivation during processing, including the constraints for the orbit, the precision of the prior ERP information, and the quantity of the chosen station. We then make a proposal for improving the ERP solution quality based on the analysis: freely constrain the four periodic dynamic parameters in the directionsD,Yof ECOM model, and the strongly constrained stochastic pulse can achieve a better result. The key to reducing the influence of the prior information in the processing is to improve the precision of predicted UT1-UTC; 100 stations in the processing is a good choice to achieve the best efficiency and quality in the calculation.
ERP;PM;LOD;influence parameters;solution quality
National Key Basic Research Program of China,No. 2012CB825604;National Natural Science Foundation of China,No.41231064, 41104012 ,41021003;CAS/SAFEA International Partnership Program for Creative Research Teams,No.KZZD-EW-TZ-05.About the first author:WANG Xinjing,postgraduate, majors in high precision GNSS data processing and positioning,E-mail:wxjcumt09@163.com.
YUAN Yunbin, researcher, majors in GNSS precision satellite navigation, positioning, orbit determination and ionosphere,E-mail:yybgps@asch.whigg.ac.cn.
2015-09-23
王新靜,碩士生,主要研究方向為GNSS高精度數據處理及定位,E-mail:wxjcumt09@163.com。
袁運斌,研究員,主要從事GNSS精密衛星導航定位與定軌及電離層方面的研究,E-mail:yybgps@asch.whigg.ac.cn。
10.14075/j.jgg.2016.10.013
1671-5942(2016)010-0902-05
P228
A
項目來源:國家973計劃 (2012CB825604);國家自然科學基金(41231064, 41104012,41021003);中國科學院、國家外國專家局創新團隊國際合作計劃(KZZD-EW-TZ-05)。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
