通過空間系繩系統返回載荷到地面的誤差分析
2016-10-29 02:11:20徐小野伊始克夫謝爾蓋法捷嚴科夫巴維爾王長青
西北工業大學學報 2016年2期
徐小野,伊始克夫·謝爾蓋,法捷嚴科夫·巴維爾,王長青
(1.薩馬拉國立航空航天大學飛行器學院,俄羅斯薩馬拉 443086;2.西北工業大學自動化學院,陜西西安 710072)
通過空間系繩系統返回載荷到地面的誤差分析
徐小野1,2,伊始克夫·謝爾蓋1,法捷嚴科夫·巴維爾1,王長青2
(1.薩馬拉國立航空航天大學飛行器學院,俄羅斯薩馬拉 443086;2.西北工業大學自動化學院,陜西西安 710072)
分析了利用空間系繩系統返回載荷到地面目標點的過程中,由于展開過程中有可能的誤差導致著陸點的偏差。首先給出了從系繩展開、自由擺動、切斷系繩后進入低軌道,最終進入大氣層到落到地面整個過程模型和計算過程;通過載荷整個運動過程中的數據給出星下點軌跡,并給出在沒有任何誤差情況下,使載荷著陸到目標點上所需要的開始釋放系繩的軌道位置;在以上結果的基礎上,最后給出當軌道高度、軌道偏心率或者剪斷系繩的時機出現一定誤差的情況下,載荷返回到地面的偏差范圍。
高度控制;計算;計算機仿真控制;動力學;誤差分析;數學模型;最優化;軌道;參數化;系繩;軌跡;速率;軌道高度;軌道偏心率;返回載荷;空間系繩;剪斷時刻
系繩衛星系統是指由2顆或者2顆以上的衛星通過系繩連接在一起運動的系統,近30年來,國內外都進行了大量的理論研究和空間實驗。美國和意大利在1992年共同研制了TSS-1系統,該系統在軌完成了大量電動力系繩研究[1]。美國NASA于1993年研制的SEDS-1,驗證了簡單輕型的繩系展開機構以及系繩展開動力學和系繩釋放后衛星脫離運行軌道和再入返回的能力[2]。1998年實施的ATEx實驗,驗證了繩系系統的穩定性、可控性,以及子星姿態的確定與控制問題[3]。最近的一次太空實驗是于2007年9月由歐洲航天局教育辦公室發起,在俄羅斯飛船“光子-M3”上進行的“年輕工程師衛星2號YES2”實驗展開了31 km的系繩,成為太空中最長的人造物體,該實驗的目的是驗證依靠系繩系統展開從軌道上返回小返回艙的任務,只是YES2實驗由于展開過程中的錯誤信號,導致系繩被提前剪斷,最終小返回艙沒有返回到地面的指定范圍內,至今沒有找到[4-6]。本文的研究內容主要針對像YES2展開過程中出現的問題,分析利用空間系繩系統返回載荷到地面目標點的過程中,由于展開過程中誤差導致的著陸點的偏差。
本文首先給出空間系繩系統從展開、擺動、切斷系繩后進入低軌道到進入大氣層整個過程的模型和計算過程;通過整個展開釋放過程的數據建立星下點軌跡,并給出展開系繩的初始位置,以使小返回艙能夠到達指定地面上的地點;最后在標準展開程序下,當存在軌道高度、軌道偏心率以及剪斷系繩的時機出現一定誤差的情況下,計算小返回艙返回到地面的偏差情況。
1 空間系繩系統的數學模型
航天飛行器(空間站)相對于子衛星(載荷)重心相對位置在球星坐標系中如圖1所示:
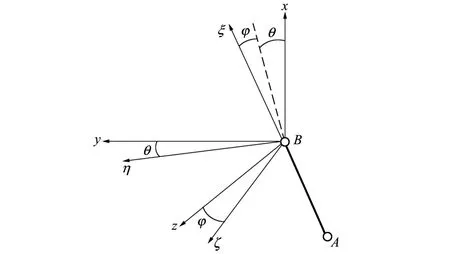
圖1 描述相對運動的球星坐標系
在圖1中的B點是空間站的重心位置,A點是被釋放的載荷相對于空間站的重心位置,Bx軸是從B點朝向地心的半徑矢量方向,By軸是橫向方向,Bz軸是空間站運動軌道面的法線方向。θ是空間站運動軌道面的面內角Bxy,?是與運動軌道平面的面外角[4-5]。
不計系繩質量的空間站在橢圓軌道上運行的動態系繩系統的模型如下:
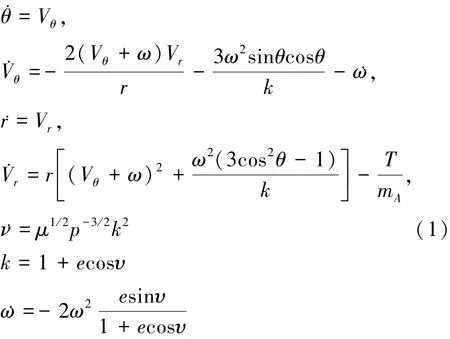
e、p、υ為偏心率,軌道的聚焦參數和空間站的真近點角;T為系繩拉力;r為釋放的系繩長度;mA為釋放的載荷重量。
2 控制方法
系繩的展開控制部分主要分為2個部分:①繩展開3 km,主要目的是保證載荷與基站航天器安全分離;②繩展開到30 km,控制的最終目的是將末端載荷送入到系繩與地垂線的偏離角約為50°的點處,系繩展開最終速度為零。
2.1系繩第一部分展開的控制率
在本文中系繩系統展開的第一階段采用了末端載荷運動軌跡是圓圈的控制律將系繩展開到垂直位置。這一階段的控制律是建立在文獻[4]中所給的動力學規律基礎上的,該動力學規律的表達式如下(系繩的第一階段展開最終長度LK=3 km)

使用數值形式的規律(2)會引起載荷逆運動(系繩可能會回卷入控制機構),對于在項目YES2中采用的機構不允許這樣。因此在文獻[4]中針對控制律(2)對帶有下列極限條件的邊值問題進行了求解

2.2系繩第二部分展開的控制率

式中:Tmin,Tmax,Ln為控制律參數。對于最終長度LK=30 km(系繩在第一階段展開的最終長度為3 km)得到下列參數值:Tmin=0.02 N,Tmax=1.018 N,Ln=24.17 km。此時,系繩與地垂線的最大偏離角約為50°。
3 空間系繩展開和釋放載荷的過程
本文的仿真是基于假設從天宮一號空間站上通過系繩釋放一個載荷,系繩全部展開后,剪斷系繩,載荷返回到地面的過程,其中天宮一號質量為8 500 kg,載荷質量20 kg,空間站的軌道高度350 km。本文對長度為30 km的系繩進行展開釋放實驗。
系繩的展開過程主要分為3個主要階段。第一階段,末端載荷以零相對速度進入地垂線方向。在這個階段中系繩系統以較低速度展開,系繩的最終展開長度約3 km(大概6 000 s)。進入展開的第二階段,這一階段的速度比較大,展開的最終長度約27 km,占用了大概2 800 s的時間。在第二階段中,控制的最終目的是將末端載荷送入到系繩與地垂線有一定偏離角的位置處,系繩展開最終速度為零。之后系繩的展開變為系繩末端載荷的自由擺動運動,并在末端載荷通過地垂線時切斷系繩[4-8]。本文的主要研究內容不是系繩展開的控制,這里不詳述,本文只給出系繩展開軌跡和結果如圖2所示。
[4-5]已經證明當載荷擺動到空間站正下方時切斷系繩,有效制動沖量最大,載荷進入大氣層時的進入角度最大,本文計算得到的進入大氣層角度為1.46°,滿足進入大氣層要求。本文中選取的進入大氣層高度為110 km,剪斷系繩后到落到地面的軌跡圖3所示。
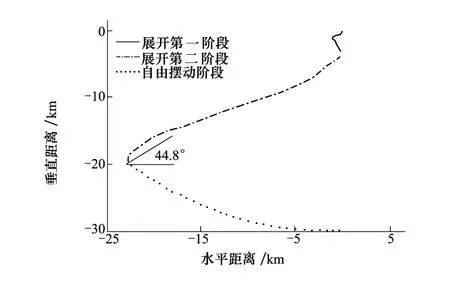
圖2 系繩展開過程載荷相對于空間站的軌跡圖
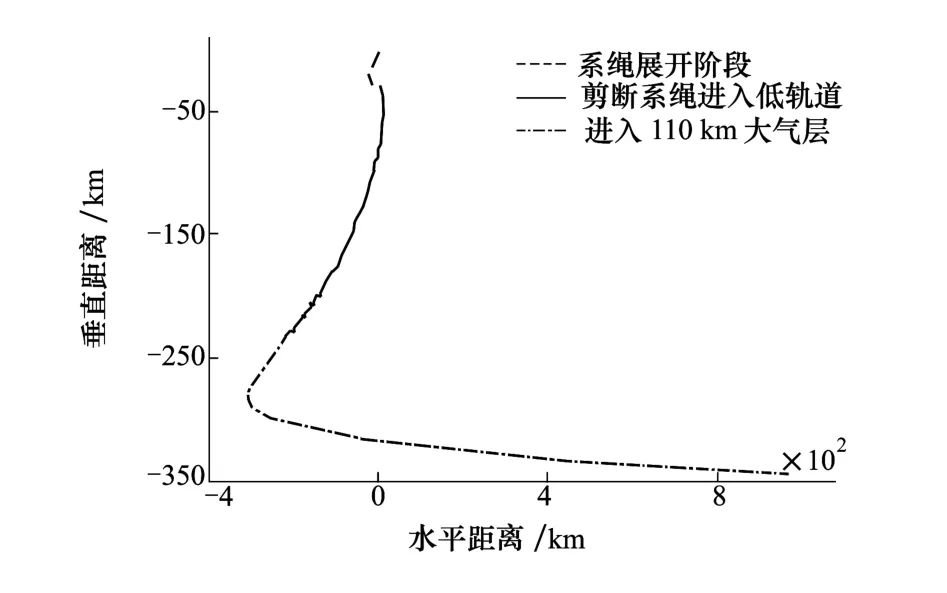
圖3 載荷相對于空間站的軌跡圖
4 星下點軌跡和確定初始展開點
本文把載荷的返回的地面的范圍定在內蒙古地區,目標位置為北緯42.5°,東經108°。
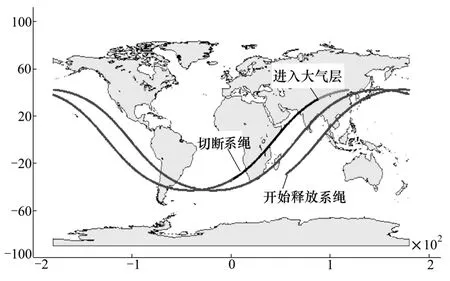
圖4 星下點軌跡圖
為了確定從軌道什么位置開始釋放系繩,載荷能夠到達所指定的位置,初步隨便給定一個開始釋放系繩的時間點,通過著陸點調整釋放位置,如參考文獻[9-10]。經過幾次調整,本文最終給定的初始條件為:軌道傾角42.7°,升交點赤經81.9°,近地點幅角70.3°,釋放位置距離近地點角度為244.1°。
最終著陸點位置為緯度42.4°,經度108.4°,達到預期要求。
5 當存在誤差時著落點的偏差情況
第四節計算給出的展開初始位置條件,載荷能夠返回到地面的目標點是在標準系繩展開程序下,也就是軌道為圓形軌道,高度為350 km,并且假設展開一切順利,當載荷擺動到空間站的正下方(載荷與垂直方向夾角為0°),切斷系繩。由于系繩的展開控制程序和進行各個階段的時間節點在釋放系繩之前就要輸入到控制設備里,在釋放過程中如果出現軌道高度等條件和實驗時不一樣的情況,載荷到地面的著陸點一定會出現一定偏差。
鑒于以上原因,本文在標準條件的控制程序下,當給定一些常有的誤差情況下實驗,觀察分析著陸點的偏差情況。
5.1當軌道高度有偏差時
標準程序是在軌道高度為350 km條件計算得到的,當軌道高度從330~370 km變化,以標準程序控制系繩展開,著陸點的變化情況如圖5所示。
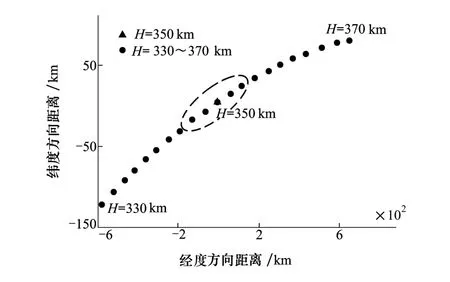
圖5 著陸點在軌道高度有誤差時的位置分布圖
從圖5中可以看出,當軌道高度為330 km和370 km,誤差已經非常大。圖中的橢圓是軌跡上一個允許著陸的范圍。也就是當軌道高度在(345~355 km)范圍變化還是可以接受的。
5.2當軌道偏心率有偏差時
標準程序是在高度為350 km圓形軌道條件計算得到的,當偏心率e從0到0.001 5變化,以標準程序控制系繩展開,著陸點的變化情況如圖6所示。
從圖6中可以看出,當偏心率e等于0.001 5時,誤差已經非常大,當偏心率e小于0.000 7時,著陸范圍可以接受。
5.3當剪斷系繩的時機有偏差時
標準程序是在載荷和垂直方面夾角為0的時候剪斷系繩得到的,在展開過程中如果出現一些誤差,剪斷系繩的時機就會提前或者偏后,本文給出了當載荷與垂直方向的夾角從-5°~5°范圍變化,以標準程序控制系繩展開,著陸點的變化情況如圖7所示。
從圖7中可以看出,但系繩被提前剪斷時,即當載荷與垂直方向的夾角小于0°時,載荷是提前著陸的,這也和YES2實驗結果相吻合[5]。當載荷與垂直方向的夾角為-2°~+3°度的范圍內剪斷系繩。地面的誤差是可以接受的。
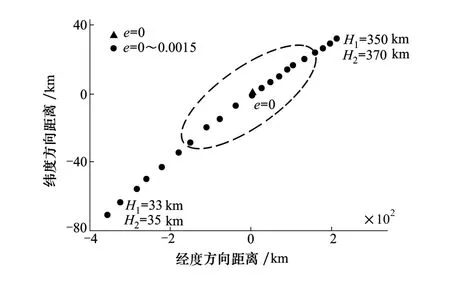
圖6 著陸點在軌道偏心率有誤差時的位置分布圖
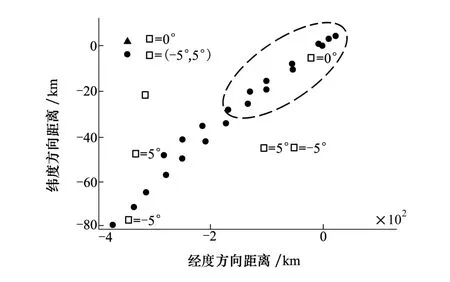
圖7 著陸點在剪斷系繩的時機有誤差時的位置分布圖
6 結 論
本文分析了利用空間系繩系統返回載荷到地面目標點的過程中,當展開過程中存在軌道高度、軌道偏心率以及剪斷系繩的時機出現一定誤差的情況下,導致著陸點的偏差情況。當軌道高度在(345~355 km)范圍變化;軌道偏心率e小于0.000 7時;當載荷與垂直方向的夾角為-2°~+3°的范圍內剪斷系繩時,著陸點偏差小于200 km,可以接受。
參考文獻:
[1] Tomlin D D,Mowery D K,Musetti B,et al.TSS Mission1 Flight Dynamics Anomalies[C]//Proceedings of the Fourth International Conference on Tethers in Space,Hampton,VA,1995:119-132
[2] Smith H F.The First and Second Flights of the Small Expendable Deployer System(SEDS)[C]//Proceedings of the Fourth International Conference on Tethers in Space,Hampton,VA,1995:43-55
[3] Zedd M F.Experiments in Tether Dynamics Planned for ATEX′s Flight[J].Advances in the Astronautical Sciences,1997,97 (1):25-44
[4] 扎伯羅特諾夫·尤里著,空間系繩系統運動動力學與控制導論[M],王長青,譯,科學出版社,2013
Zabolotnov Yuriy.Introduction to Space Tether Dynamics and Motion Control Systems[M],Wang Changqing,Translator Science Press,2013(in Chinese)
[5] Williams P,Hyslop A,Stelzer M,et al.YES2 Optimal Trajectories in Presence of Eccentricity Andaerodynamic Drag[C]//The 57th International Astronautical Congress,Valencia,Spain,2006
[6] Sanmartin J R,Charro M.Performance of Electrodynamic Tethers and Ion Thrusters against Hybrid Systems[J].Journal of Propulsion and Power,2006,22(3):698-700
[7] He Yong,Liang Bin,Xu Wenfu.Study on the Stability of Tethered Satellite System[J].ActaAstronautica,2011,68:1964-1972
[8] Sanmartin J R,Estes R D,Lorenzini E C,et al.Efficiency of Electrodynamic Tether Thrusters[J].Journal of Spacecraft and Rockets,2006,43(3):659-666
[9] 何力,趙漢元.載人飛船標準返回軌道設計[J].國防科技大學學報,1996(03):63-67
He Li,Zhao Hanyuan.A Design of Standard Return Trajeetory for Manned Spaceship[J].Journal of National University of Defense Technology,1996(03):63-67(in Chinese)
[10]Vas I E,Kelly T J,Scarl E A.Space Station Reboost with Electrodynamic Tethers[J].Journal of Spacecraft and Rockets,2000, 37(2):154-164
Analyzing Deviations of Returning Load from Targeted Landing Point When SPace Tether System Is Used
Xu Xiaoye1,2,S.A.Ishkov1,P.V.Faddeenkov1,Wang Changqing2
(1.Aircraft Institute,Samara State Aerospace University,Samara 443086,Russia
2.Department of Automation,Northwestern Polytechnical University,Xi′an 710072,China)
When tether system is used,we analyze the deviations,which are due to the errors of the deployment process of returning load from targeted landing point.We first give the mathematical model and calculation procedure of the whole processing,including:deployment of the tether line,free-swinging,cutting the tether line,entry into the atmosphere and eventually falling into zone surrounding the targeted landing point;next,in the absence of any error condition,we calculate the appropriate track position for beginning the release of tether line,so that the returning load can land on the targeted landing point;finally,when there is an error of orbital altitude,orbital eccentricity or the timing of tether line cutting,we calculate the range of deviation from the targeted landing point.
altitude control;calculations;computer simulation control;dynamics;error analysis;mathematical models;optimization;orbits;parametrization;tether lines;trajectory;velocity;orbit altitude;orbit eccentricity;return load;space tether;timing of tether line cutting
V448.2
A
1000-2758(2016)02-0294-05
2015-09-15基金項目:2011年國家國際科技合作專項與陜西省科學技術研究發展計劃(2013KW09-02)資助
徐小野(1986—),西北工業大學博士研究生,主要從事空間系繩展開控制的研究。
